无人机航迹规划与状态追踪系统
2016-06-20魏明哲
魏明哲
(唐山学院 智能与信息工程学院,河北 唐山 063020)
无人机航迹规划与状态追踪系统
魏明哲
(唐山学院 智能与信息工程学院,河北 唐山 063020)
摘要:针对小型无人机控制的复杂性,设计了一套地面站综合控制系统。该系统具有航向的监测与控制、航迹的规划与显示、任务信息的接收与执行等功能,可以实现小型无人机的超视距控制和任务信息的回传与追踪。实验表明,系统可实现64 bit数据帧间隔50 ms收发与间隔1 000 ms显示数据更新,满足实际应用需求。
关键词:无人机;航迹规划;状态追踪;地面站控制系统
0引言
无人机通过陀螺仪感知自身飞行状态,依据地面控制站发送来的路径信息和任务信息,自动计算飞行路线并控制旋翼动作到达预定目标。路引等研究人员对电台上行与下行数据传输模式进行了仿真,并结合OpenGL功能仿真了飞行器姿态[1]。本文将对无人机飞行中实际采集的传感器数据进行数据传输控制分析,并在上行与下行数据帧构成上结合实际情况作了修改,具有实用价值。
1无人机应用技术的组成
无人机的应用技术可分为以下三个部分:地面站控制系统、运动载荷和任务载荷。
地面站控制系统运行于计算机中,负责智能无人机的航迹规划、GPS坐标和多种传感器实时数据及视频数据的显示与存储、无线电台数据的收发控制;运动载荷负责无人机航迹规划数据的接收与运动方向的计算、传感器数据的无线发送;任务载荷主要负责无人机附加功能的实现,如视频接入、探测挂载等。
2无人机地面站控制系统的组成
地面控制站需具有航迹规划、飞行速度设定、协议转换等发送功能,同时具有无人机实时回传状态信息的接收与显示监控功能,从而使无人机能够安全可靠地飞行和完成指定任务。笔者主要设计开发了地面站控制系统。针对航迹规划和状态追踪的功能需求,设计实现路径规划功能和针对GPS信息、姿态传感器的状态追踪功能[2];同时结合E30-TTL-100无线串口电台,开发实现界面友好、基于UDP协议的地面站控制系统;数据的来源采用软件模拟结合硬件实现,通过E30-TTL-100无线串口电台收发。系统的组成框图如图1所示。
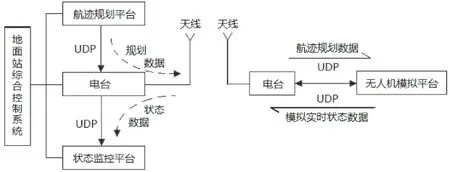
图1 地面控制系统的组成
2.1无线电台
2.1.1硬件平台
为实现无人机和地面站控制系统之间的数据传输,选用E30-TTL-100无线串口电台,该无线电台常用工作频段为433 MHz,最大功率20 dBm(约合100 mW),空中速率1.0 Kbps,接收灵敏度为-119 dBm,空间最大传输距离为2 000 m[3]。在地面站终端通过串口转换模块与计算机连接,在无人机端采用RS232通讯接口与无人机主控进行连接,实现数据的无线传输。
2.1.2软件平台
电台软件负责地面站控制系统和无人机之间的数据收发,主要涉及波特率的设置、空中速率的设置、规划平台和监控平台的UDP数据收发等功能。同时,针对辅助平台,笔者还设计实现了其与无人机模拟平台的UDP通信和无线收发功能。电台硬件如图2所示。

图2 E30-TTL-100无线串口电台
2.2规划平台
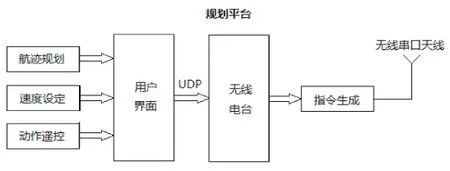
图3 规划平台结构
规划平台结合Google Earth软件实现[4]。采用Google Earth指定飞行路线,生成经纬度坐标文件,规划平台调用经纬度坐标文件,设定无人机飞行速度,依照通信协议组成待发送数据,通过UDP协议发送至电台进行发射。规划平台结构如图3所示。2.3监控平台
监控平台主要由仪表盘和数据列表组成[5]。通过电台接收下来的无人机实时数据,依据通信协议解析出经纬度、航向、横滚、俯仰和速度等信息,送至监控仪表盘实时显示,追踪无人机运动状态,同时在数据列表中显示[6]。监控平台结构如图4所示。

图4 监控平台结构
2.4辅助平台
无人机的运动载荷采用软件模拟的方式设计,实现无人机辅助模拟平台。模拟平台通过电台接收规划平台的数据,解析出路线规划经纬度坐标和无人机飞行速度信息;将采集存储的无人机实时状态数据提取,依据通信协议组成待发送数据传至电台发送[7]。无人机模拟平台结构如图5所示。
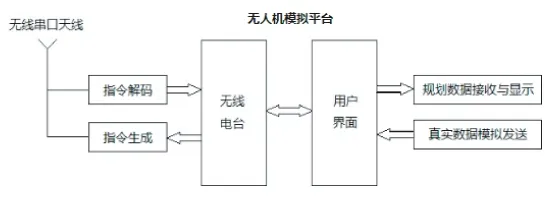
图5 无人机模拟平台结构
3无人机系统交互软件
交互软件基于.NET平台设计实现。其中,本地IP为运行地面控制系统的计算机的IP地址,IP地址采用16进制码显示;网络端口为预先设定平台识别端口,不同平台之间采用UDP协议,通过网络端口识别目的地址,实现同局域网下数据的收发功能。
3.1规划平台软件
规划平台的软件设计流程如图6所示。
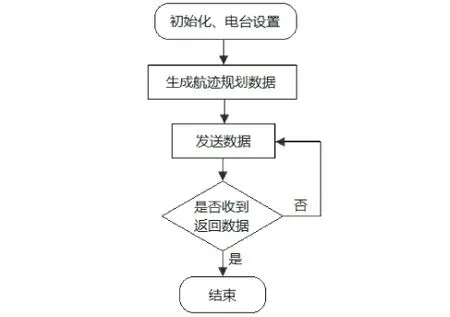
图6 规划平台软件设计流程
规划平台交互软件如图7所示。其中规划平台航迹规划产生的GPS坐标文件已由Google Earth软件生成。软件系统可实现GPS坐标文件的浏览、速度设定、规划数据发送和无人机飞行指令的生成与发送;可实现规划航迹数据在Google Earth上划线显示功能[8]。

图7 规划平台交互软件
3.2监控平台软件
监控平台的软件设计流程如图8所示。监控平台交互软件如图9所示。软件可实现无人机实时回传的64bit状态数据的列表显示与仪表盘动态显示功能[9]。

图8 监控平台软件设计流程

图9 监控平台交互软件
3.3电台平台软件
电台平台与E30-TTL-100无线串口电台硬件通过USB接口相连接,完成UDP数据和串口数据的协议转换和数据收发中转。其交互软件如图10所示。

图10 电台平台交互软件
3.4模拟平台软件
模拟平台的软件设计流程如图11所示。模拟软件实现航迹规划平台的规划数据的接收与显示功能模拟,以及真实航迹数据的发送功能,以上两项功能的实现均需结合电台软件实现,如图12所示。
4结语
无人机航迹规划和状态追踪系统很好地实现了规划数据的发送和接收、模拟实时数据的接收与显示,结合无线电台实现了间隔为1 s的数据更新和仪表板显示更新,满足系统性能要求。
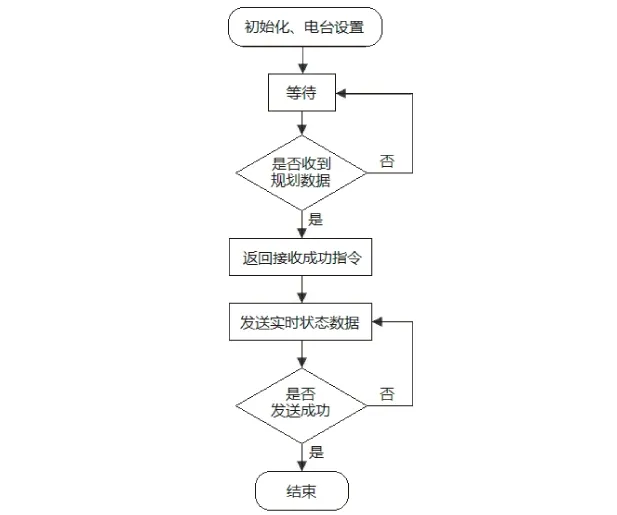
图11 模拟平台软件设计流程

图12 模拟平台交互软件
参考文献:
[1]路引,郭昱津,浦黄忠,等.某型无人机全机仿真平台设计[J].四川兵工学报,2015,36(5):123-126.
[2]王洋,刘伟.盘旋跟踪地面目标小型无人机控制系统设计[J].北京航空航天大学学报,2010,36(10):1252-1255.
[3]罗珊,陈睿璟,路引,等.便携式地面测控系统[J].兵工自动化,2012(8):14-16.
[4]郭庆,张炜,张怡哲,等.舰载无人机精确着舰轨迹控制及飞行验证[J].飞行力学,2012,30(5):448-452.
[5]石书济,孙鉴,刘嘉兴.飞行器测控系统[M].北京:国防工业出版社,1999:210-214.
[6]John Sharp. Visula C# 2010从入门到精通[M].北京:清华大学出版社,2010:184-186.
[7]韩建斌,朱纪洪,章恒,等.基于DSP的总线式飞控系统[J].航天控制,2006,24(5):63-37.
[8]张劲锐,卢京潮.基于GIS的无人机地面测控系统设计与实现[J].弹箭与制导学报,2008,28(5):2-4.
[9]吴潜.无人机测控系统的现状与发展趋势[J].电传技术,2009,49(9):2-3.
(责任编校:夏玉玲)
An UAV Flight Path Planning and State Tracking System
WEI Ming-zhe
(College of Intelligence and Information Engineering, Tangshan University, Tangshan 063020, China)
Abstract:In the light of small-sized UAV control complexity,the author of this paper has designed a ground integrated control system for UAV, which is capable of monitoring and controlling courses, planning and displaying tracks, receiving and executing tasks, performing the BVR control of a small UAV, and sending back and tracking information. Experiments show that the system can receive and transmit 64 bit data at the interval of 50 ms and display data update at the interval of 1000 ms, thus meeting the application requirements.
Key Words:UAV; route planning; state tracking; ground control system
基金项目:2014年度唐山市科技计划项目(14110213a)
作者简介:魏明哲(1983-),男,河北安平人,讲师,硕士,主要从事信号处理与通信系统研究。
中图分类号:TN92
文献标志码:A
文章编号:1672-349X(2016)03-0031-04
DOI:10.16160/j.cnki.tsxyxb.2016.03.010
