基于Mathcad的高效率全桥DC-DC控制部分的设计
2016-06-15李臻康龙云
李臻,康龙云
(华南理工大学 电力学院,广东广州 510640)
基于Mathcad的高效率全桥DC-DC控制部分的设计
李臻,康龙云
(华南理工大学 电力学院,广东广州 510640)
本文针对采用了先进的全桥软开关电流模式PWM控制芯片ISL6752控制的全桥DC-DC拓扑,使用Mathcad设计计算软件,简化了全桥拓扑关键控制参数的设计过程。本文先介绍了系统整体结构,设置了主电路的基本参数。然后,把从控制到输出的控制环路分为了三级,并分别推导了它们的等效数学模型。最后,为了验证设计的有效性,本文使用Mathcad搭建了控制系统三级组成的数学模型,并绘制了整个系统的伯德图。通过反复调试控制补偿电路参数,得到了满意的系统频率响应特性,验证了对采用ISL6752芯片的全桥拓扑控制部分建模以及设计的准确性。
全桥DC-DC;ISL6752;Mathcad
0 引言
随着新能源交通系统的普及,对电池组进行充放电的电力电子装置的研究也变得热门起来[1],本文针对一款电动摩托车的车载充电器,采用的是全桥拓扑进行设计。全桥DC-DC变换器是一款被广泛被运用于电力电子装置中的拓扑,其有着输出功率大,输入电压等级高的优势。在直流变换器中,随着对装置高频化、小型化和模块化的要求,开关损耗成为主要的损耗之一,因此,如何实现开关管的软开关是一个重要的研究方向[2]。目前常用的软开关实现方式包括:移相控制法、有限双极性控制法[2]等。Intersil公司最新推出的全桥型PWM零电压开关并具有同步整流控制功能的集成电路IC——ISL6752[2][3],它克服了移相控制方式下不能同时实现次级的零点压开关和同步整流的不足,做到了用一块主控芯片同时实现初、次级零电压开关和次级侧同步整流的功能。
由于车载充电器的工作环境比较恶劣,为整个系统设置一个稳定的控制补偿电路参数变得尤为重要[1][5]。基于上述情况,本文先对控制电路的总体结构进行了介绍,然后把从控制到输出部分的电路分三级分别进行了数学模型的推导并得出了传递函数[5][6]。进而,采用Mathcad计算软件搭建各个模块的数学模型[7],并分别进行补偿设计,最终得到系统的一个整体传递函数并进行bode分析[8][9][10]。最后,得出了一组在给定设计条件下的系统控制部分的控制参数,并就斜坡补偿电路的设定做了补充说明。此设计过程的意义在于,通过Mathcad工程计算软件,把系统的控制部分的设计独立出来并简化了,而设计好的控制参数可以移植到与之类似的全桥DC-DC拓扑中,减少了设计人员的工作量。
1 采用ISL6752主控芯片的控制电路介绍
1.1 系统整体结构设计
如图1,整个系统的组成包括:全桥DC-DC电路、高频变压器、全波整流电路、输出滤波电路、以ISL6752芯片为核心的控制电路、隔离驱动电路。
给出系统设计初始输入输出参数如下[2][4]:输入电压最大值Vbus_max=350V、额定值Vbus_nom=311V,输出电压Vo_nom=54V,输出电流最大值Io_PK=44A、平均值Io_avg=40A。初始元件参数如下:输出电感量L_o=56.2μH,高频变压器变比Nt=3,高频变压器原边电感量Lpri=1870μH,电流互感器变比Nct=100,峰值电流限制电压VCL=1V,开关频率fs=100kHz。

图1 系统整体结构图Fig. 1 The structure of the entire system
1.2 控制电路的组成及其建模与补偿
1.2.1 峰值电流模式控制下的功率级小信号增益(Iout/Verr)

图2 采用ISL6752的全桥DC-DC的电流采样电路和输出电路Fig. 2 The current sensing and output circuit of Full-Bridge DC-DC based on ISL6752
在交流分析中,因为输入输出电压为常数,所以PWM电流模式的功率级增益gt在数值上等于斜坡补偿的斜率值m。ISL6752的片外电流采样电路及斜坡补偿电路如图2(a)所示,其中,Ra、Rb、Rs是与斜坡补偿有关的参数,可以运用叠加定理解方程得到,同样的也可以计算出斜坡补偿的斜率值m[2][4][5],即PWM电流模式的功率级增益gt,表示为式(1)。

由图2(b)可推导得,整个PWM电流模式的功率级传递函数为:

1.2.2 电压环的补偿
电压环路的组成包括三个部分,从电压采样到控制输出依次为:含LMV431并联电压基准的电压放大电路、含EL5111运放带光耦隔离的补偿放大电路以及带输出负载的PWM功率级电路。上一小节已经推导了输出功率级的传递函数,接下来推导两个放大电路的传递函数,最后,根据总的传递函数得出控制系统的频率特性。
由LMV431数据手册查得并联电压基准LMV431的开环频率特性为图3(a),从图中可得它的开环增益约为57db,为了得到它的开环传函,尝试加入两个极点拟合它的频率特性。通过反复试凑,得到LMV431的开环传函为

由开环传递函数在Mathcad中做出它的bode图如图3(b)所示,与图3(a)对比基本吻合,说明可用式(3)代表LMV431的开环传函,其穿越频率计算为605.6kHz。
LMV431的实际应用电路见图4(a),它是一个反向的运算放大器,可用图4(b)表示其方框图,推导它的传递函数为

其中,


图3 LMV431数据手册上的开环幅相曲线及其模型拟合曲线Fig. 3 Open loop amplitude and phase curve in LMV431 data sheet and its model fitting curve

图4 LMV431的实际应用电路及其方框图Fig. 4 The practical application circuit of LMV431 and its block diagram

EL5111运放的实际应用电路如图5(a)所示,其交流模型也可用一个反向放大器电路代替,见图5(b)。对其做与LMV431放大电路相似的推导,得其开环传递函数(穿越频率计算为40.9MHz)、应用电路传递函数分别表示为式(7)和式(8)

其中,
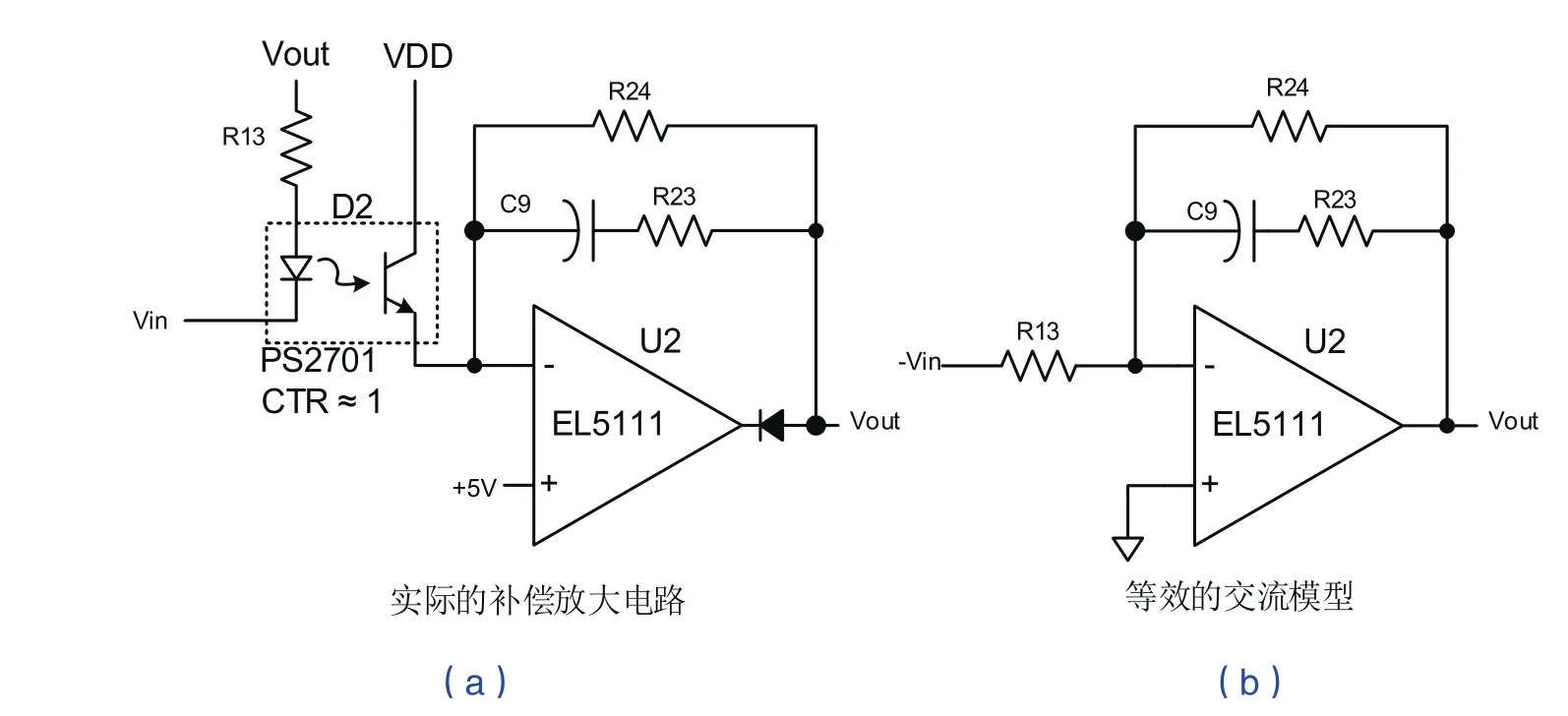
图5 EL5111的实际应用电路及其等效交流模型Fig. 5 The practical application circuit of EL5111 and its equivalent AC model


2 控制环路整体设计与仿真
在对系统整体进行伯德分析之前,需要做以下几点假设[4]:
(1)PWM控制和桥臂两个开关管之间的关断延迟足够小。在实际电路中,关断延迟可能造成PWM电流模式拓扑的非线性跨导增益,所以应尽量使得关断延迟小
(2)输出电容的ESL足够小,不会对伯德图上PWM到输出这一级的增益造成很大影响。
(3)光耦的带宽足够宽,不会给系统引入极点,从而影响系统闭环的相位特性。
由于还有许多其他的电路寄生参数,可能会带来不可预料的环路响应,所以对实际电路进行频率响应分析很有必要,从而保证适当的环路补偿结果。
系统的总的传递函数为上一小节推导出来的三级传函的积,即

分别在设计要求的最大和最小负载下验证系统的动态响应特性。在负载最小时,用RL_min=Vo_nom/Io_min代替式(2)中的RL,此处选Io_min=0.011A(模拟空载的情况);在负载最大时,用RL_max=Vo_nom/Io_PK代替式(2)中的RL,
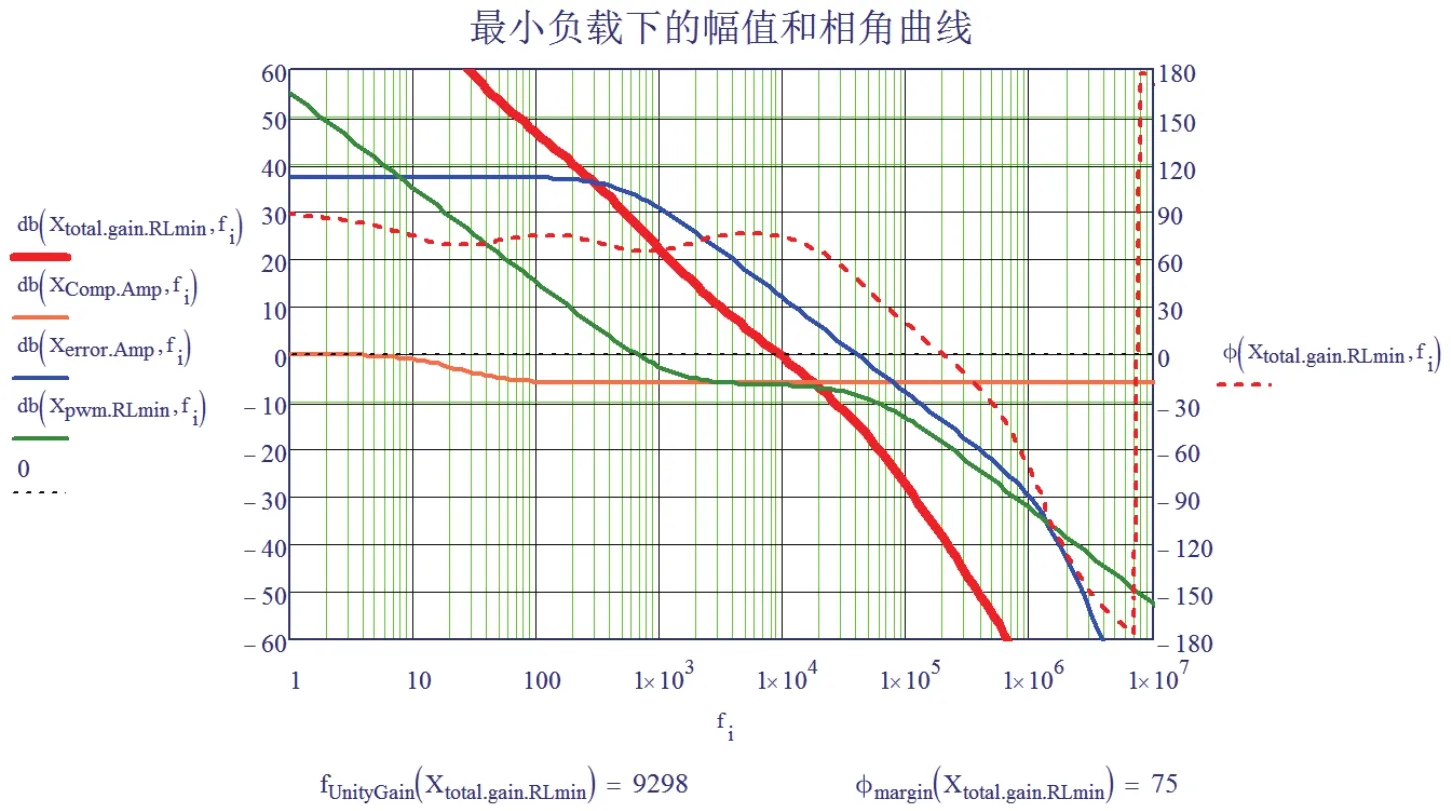
图6 系统取最小负载时的各个部分及整体的幅相曲线Fig. 6 The amplitude and phase curves of each part and the whole system when the system takes the minimum load
图(5)和图(6)分别给出了在最小负载和最大负载时系统的开环频率响应图。其中,蓝色、橙色和绿色的实线分别代表了LMV431并联电压基准的电压放大电路、EL5111运放带光耦隔离的补偿放大电路以及带输出负载的PWM功率级电路的增益曲线,他们在同一频率上数值的叠加就是系统总的增益曲线,在图中用红色实线表示。图中的红色虚线代表系统总体的相角曲线。从图(5)中可以看出,系统在最小负载时的穿越频率为9298Hz,相角裕度为75°,从图(6)中可以看出,系统在最大负载时的穿越频率为9155Hz,相角裕度为75°。由经典控制理论的工程实践经验[10],系统穿越频率小于开关频率的十分之一,相角裕度大于45°。综上,可以视为设计的系统环路有较好的稳定性。
在实际的控制参数配置中,可以把控制环路的三级先分别进行参数设计,并做出各自的伯德图进行零极点配置的效果分析,就可以对最终系统整体的控制效果进行预测,从而减少设计人员的工作量,提高工作效率。

图7 系统取最大负载时的各个部分及整体的幅相曲线Fig. 7 The amplitude and phase curves of each part and the whole system when the system takes the minimum load
3 总结
本文详细分析了基于先进的全桥PWM电流型软开关控制芯片ISL6752控制的全桥拓扑,建立了其从控制到输出的数学模型,把控制部分分为了三级结构,分析了每一级的伯德图。最后,利用Mathcad工程计算软件,对每一级电路进行参数配置,并最终得到一个满意的系统整体的频率响应。结果表明,运用Mathcad软件的强大计算和绘图功能,能大大简化工程人员在开关电源的环路设计时的工作量。为实际电路的设计提供一个重要的参考调节方向。
[1] 董瑞青. 新能源汽车发展战略研究[J]. 新型工业化,2011,1(3):19-24.
R Q Dong. Research on New Energy Vehicle Develop Strategies[J]. The Journal of New Industrialization,2011,1(3):19-24.
[2] 阮新波. 脉宽调制DC/DC全桥变换器的软开关技术[M].第2版.北京:科学出版社,2012.
X B Ruan. Soft switching technology of DC/DC full bridge converter with pulse width modulation[M]. Beijing:Science Press,2012.
[3] Intersil. ISL6752 Data Sheet[Z]. Http://www.intersil.com.
[4] Intersil. Designing with ISL6752DBEVAL1Z and ISL6754DBEVAL1Z Control Cards. (AN1619.1)[Z]. 2011. Http://www.intersil.com.
[5] 史永胜,张建飞,宁青菊,等. 斜坡补偿电路在峰值电流控制模式中的应用[J]. 液晶与显示,2012,02:217-222.
Y S Shi,J F Zhang,Q J Ning,et al. Application of slope compensation circuit in peak current control mode[J]. LCD and display,2012,02:217-222.
[6] 李淼,易吉良,周述庆,等. 电力机车车顶绝缘检测装置高压开关电源的研究[J]. 新型工业化,2016,6( 2):21-26.
M Li,J L Yi,Z S Qing,et al. Research on high voltage switching power supply of electric locomotive roof insulation detection device[J]. The Journal of New Industrialization,2016,6( 2):21-26.
[7] Pan H,Gao M. The small signal model of Buck circuit with lead compensator network[C]// International Conference on Electrical and Control Engineering. IEEE,2011:3267 - 3270.
[8] Al-Mothafar M R D,Hammad K A. Small-signal modelling of peak current-mode controlled buck-derived circuits[J]. IEE Proceedings -Electric Power Applications,1999,146(6):607-619.
[9] Yang Y,Li X,Jiang Y,et al. Analysis of non-inverting amplifiers’ gain error patterns by MathCAD[C]// International Conference on Electric Information and Control Engineering. IEEE,2011:3987 - 3990.
[10] 王云,韩立峰. 开关电源环路补偿计算及辅助软件Mathcad的应用[J]. 铁路通信信号工程技术,2013,05:100-102.
Y Wan,L F Han. Compensation calculation of switching power supply and application of auxiliary software Mathcad[J]. Railway Communication Signal Engineering Technology,2013,05:100-102.
Design of High Efficiency Full-Bridge DC-DC Control Part Based on Mathcad
LI Zhen, KANG Long-yun
(School of Electric Power, South China University of Technology, Guangzhou, China, 510640)
This article focus on a full bridge DC-DC topology using advanced full bridge soft switching current mode PWM control chip ISL6752. The design process of the key control parameters of the full bridge topology is simplified by using the design and calculation software Mathcad. The whole structure of the system is frstly introduced, followed by setting the basic parameters of the main circuit. Then, the control loop from the control to the output is divided into three stages, and their equivalent mathematical models are derived respectively. Finally, in order to verify the effectiveness of the design, the mathematical model of the three stages are built in Mathcad, as well as the bode diagram of the whole system. By repentantly adjust the control circuit parameters, a satisfying system frequency response are obtained. The effectiveness of the modeling and design of the full bridge topology control system using ISL6752 chip are verifed.
Full-Bridge DC-DC; ISL6752; Mathcad
10.19335/j.cnki.2095-6649.2016.12.002
:LI Zhen, KANG Long-yun. Design of High Efficiency Full-Bridge DC-DC Control Part Based on Mathcad[J]. The Journal of New Industrialization, 2016, 6(12) : 9-14.
国家自然科学基金项目青年基金资助项目(51377058,61104181)
李臻(1992-),男,硕士,研究方向:电力电子与电力传动;康龙云(1961-),男,教授,博士生导师,研究方向:电动汽车和新能源发电
本文引用格式:李臻,康龙云.基于Mathcad的高效率全桥DC-DC控制部分的设计[J]. 新型工业化,2016,6(12):9-14.
