永磁同步电机滑模变结构鲁棒控制
2016-06-13崔家瑞高江峰张波李擎
崔家瑞, 高江峰, 张波, 李擎
(1.北京科技大学 自动化学院,北京 100083; 2.中国电力科学研究院,北京 100192)
永磁同步电机滑模变结构鲁棒控制
崔家瑞1,高江峰1,张波2,李擎1
(1.北京科技大学 自动化学院,北京 100083; 2.中国电力科学研究院,北京 100192)
摘要:为了克服常规PID速度控制器的缺点,有效抑制状态变量的超调问题,加快转子的收敛速度,增强系统的抗干扰性,提出了一种用于表面式永磁同步电动机的上下界滑模变结构速度控制器。与常规PID速度控制器不同,该控制器将速度误差与系统状态量的变化相关联,通过预设负载转矩的上下界值来实时改进滑模控制率。该控制器可取代常规PID控制器应用于永磁同步电动机矢量调速系统中。仿真和实验结果表明,基于上下界的滑模变结构控制器能够有效地提高系统的静态、动态特性与鲁棒性。
关键词:表面式永磁同步电机;上下界;控制器;滑模变结构
0引言
现代交流调速控制系统中,永磁同步电机(permanent magnet synchronous motor,PMSM)以其优异的性能在机器人、航空航天领域、精密数控机床和伺服系统等领域有着广泛的应用[1-3],但由于PMSM是一个多输入、强耦合、非线性、变参数的复杂对象。因此采用常规的PID控制,虽然能在一定程度上满足控制的要求,但是常规PID对系统的数学模型要求的精度比较高,容易受到外来干扰和系统内部参数变化的影响,鲁棒性不强,无法满足高性能的要求[4-6]。因此,近几年来控制器的研究方向转向现代控制理论中的模糊控制、自适应控制、神经网络控制等,这些先进的控制器虽然可以提高系统的运行性能,但是都各有缺点。例如,文献[7]提出将模糊控制运用到控制系统中,由于模糊化,专家规则库,去模糊化的复杂应用,使得系统的控制精度受到限制;文献[8-10]提出的神经网络控制理论,因为需要自适应学习,需要比较长的数据处理时间来调整系统的参数,致使神经网络控制如果要缩短控制时间则需要使用速度很快的微处理器,无形中加大了系统设计的成本;而自适应控制[11]对系统的负载速度变化比较敏感。20世纪50年代出现的滑模变结构控制理论[12-13]是一种非线性控制理论,滑模变结构控制以其对系统数学模型精确度要求不高,对系统参数摄动和外部扰动具有完全鲁棒性等优点,能够实现系统的渐进稳定性[14-15],因此,在高性能的永磁同步电机(PMSM)控制系统[16-17]中有很好的应用前景。
本文将一种新的基于上下界的滑模变结构速度控制器代替常规的PID速度控制器,并将之应用于永磁同步电动机的矢量控制系统中,通过预设负载转矩的上下界值去实时改进滑模控制率,利用改进后的控制率去实现对参考速度的跟踪控制, 最终实现整个伺服系统的稳定性控制。最后,对有干扰下的永磁同步电动机矢量控制系统进行了仿真实验研究, 仿真结果证明了该控制器的有效性。
1PMSM系统数学模型
在分析、建立永磁同步电机的数学模型过程中,通常作如下假设:转子永磁磁场在气隙空间分布为正弦波,定子电枢绕组中的感应电动势也为正弦波;忽略定子铁心饱和,认为磁路线性,电感参数不变;不计铁心涡流与磁滞损耗;转子上没有阻尼绕组。
基于以上假设,在d-q坐标系下,永磁同步电机的数学模型如下:
电压方程
(1)
磁链方程
(2)
对于具有对称转子结构的表面式永磁同步电机有:Ld=Lq。
因此,简化之后的转矩方程

(3)
机械运动方程
(4)
其中:ud是d轴电压;uq是q轴电压;id是d轴上的电流;iq是q轴上的电流;Ld是永磁体在d轴上的电感;Lq是永磁体在q轴上的电感;ω是转子的电角速度;Rs定子电阻;P是永磁同步电机的极对数;J是转子的转动惯量;TL是负载转矩;Te是电磁转矩;φf是永磁体与定子交链的磁链;B为系统的粘滞系数;Id等效d轴励磁电流。
2基于上下界滑模变结构控制器的设计
永磁同步电动机矢量调速系统采用下图1所示的控制方案。设计滑模控制器的输入为转速误差和给定转速,输出为q轴电流值。

图1 调速系统框图Fig.1 Diagram ofthe speed control system
根据PMSM的电机运动方程(4),可得

(5)
控制输出量 U=iq。
取滑模面方程为
(6)
其中误差项 e=ω*-ω。
ω*和ω分别为给定的电机期望转速和实际转速;c为常系数,用来保证滑动模态的存在和系统进入滑模面的条件。
对滑模面进行微分,联立式(5)和式(6)可得

(7)
根据滑模变结构原理,滑模可达性条件仅保证由状态空间任意位置运动点在有限时间内到达切换面的要求,而对于趋近运动的具体轨迹未作任何限制,因此本文采用指数趋近律的方法,以改善趋近运动的动态品质,令

(8)
联立式(7)~(8)得

因此,U的解为
(9)
U就是能够保证滑动模态存在,即强迫系统沿切换面运动所需要的控制力。但是,由于干扰量TL未知,无法精确的实时求解控制率,达不到稳态控制转速的标准,因此,通过预设TL的上下界值去实时改进滑模控制率,利用改进后的控制率去实现对参考速度的实时跟踪控制, 最终实现整个伺服系统的稳定性控制。
设控制率方程为
(10)

将式(10)带入式(7)可得

(11)
假设干扰TL满足:T1≤TL≤T2。

则可取

(12)
将式(12)带入式(10)可得
(13)
由上述推导过程,建立基于上下界的滑模变结构速度控制器。其控制框图如图2所示。
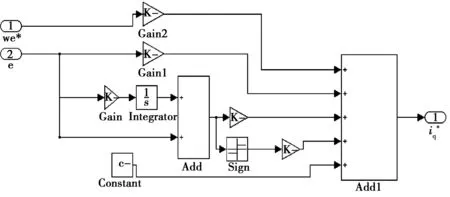
图2 基于上下界滑模变结构速度控制器Fig.2 Sliding mode speeding controller based on upper and lower boundary
3仿真与实验研究
为验证基于上下界滑模控制器对永磁同步电动机PMSM控制系统的有效性,对提出的算法分别进行了仿真和实验研究,仿真采用Matlab/SIMULINK环境,电机实验平台采用的主控芯片为TI公司的DSP中TMS320F2812芯片,实验和仿真采用的 PMSM参数见表1。
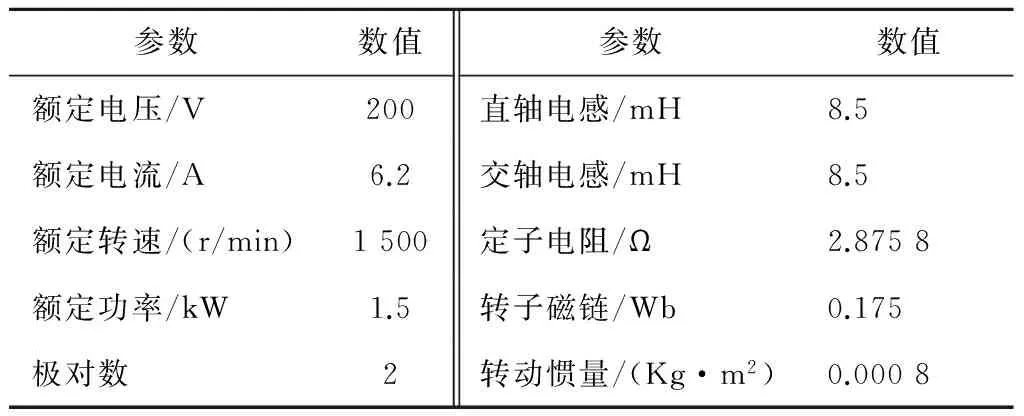
表1 电动机参数
3.1仿真结果分析
电机启动时,给定转速为1 200 r/min,图3~图5分别是在常规PID控制器和基于上下界滑模控制器下的永磁同步电机空载启动动态特性曲线对比图。
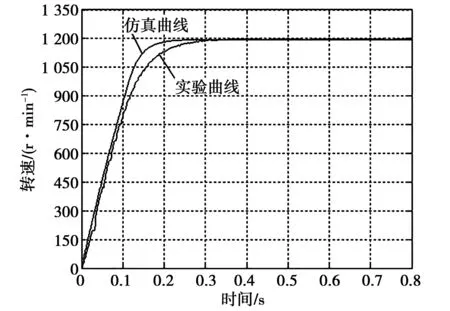
图3 PID控制器仿真结果与实验结果对比Fig.3 Comparison of simulation results and experimental results of PID controller
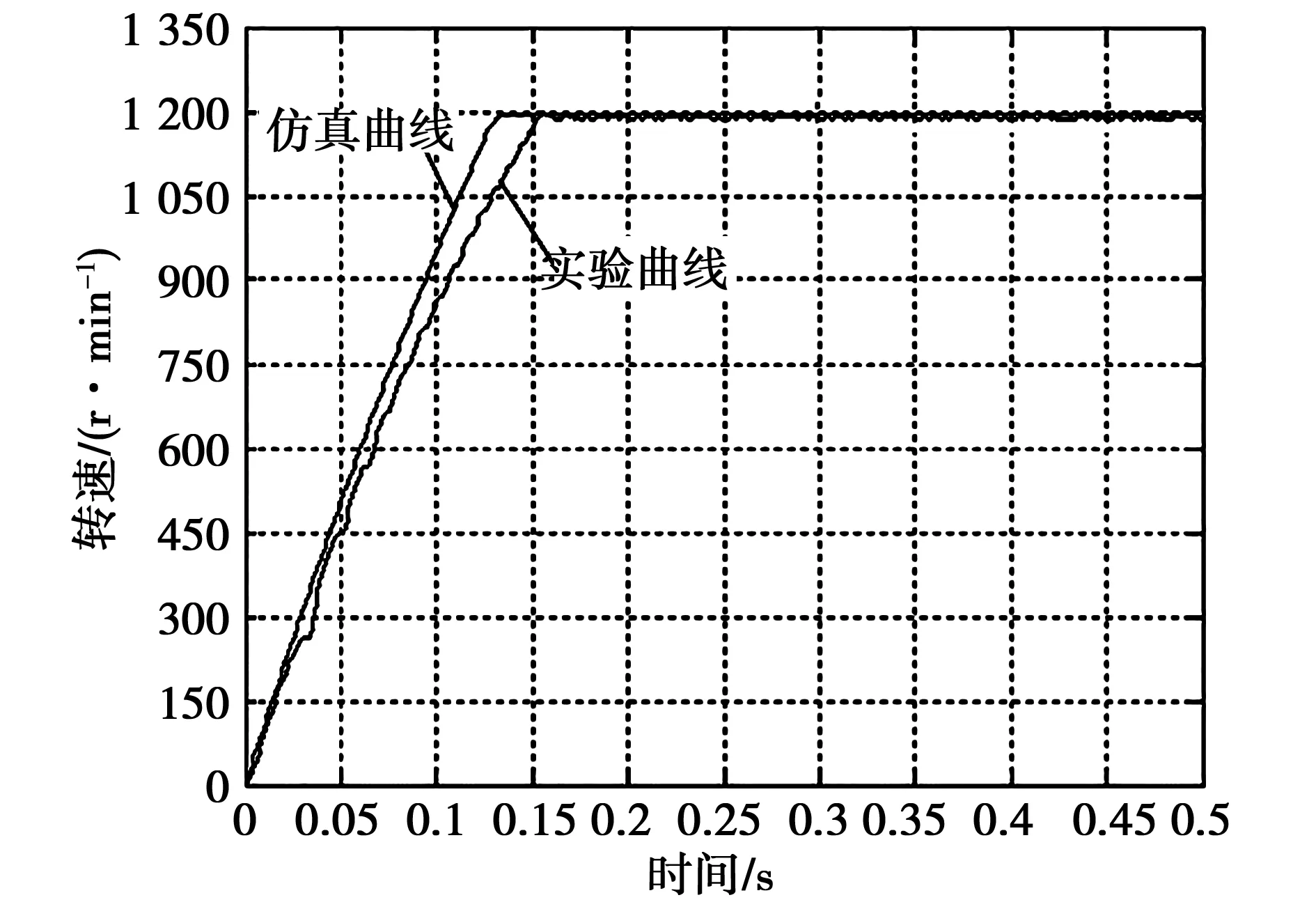
图4 SMC控制器仿真结果与实验结果对比Fig.4 Comparison of simulation results and experimental results of SMC controller
根据以上速度响应波形,从仿真图形图3~图5中,可以看出实际中电机的转速稍微滞后于仿真结果,因为这些滞后都是由系统变化量的动态过程造成的,参数不可能像仿真过程中的那中突变。由图3、图4可以看出让电机达到规定速度值,PID控制需要接近0.3 s的时间,而SMC控制不到0.2 s。由图5可以看出滑模控制响应时间比PID控制响应提升了近一倍,由此可以得出,基于上下界的滑模控制器较常规PID控制器响应时间快,无超调,鲁棒性强。
当电机进入稳态运行之后,在PID控制方式下,在0.6 s时将负载干扰由5 N突变为10 N;同样的,在滑模变结构控制方式下,也在0.6 s时给系统加上干扰。由图6可以看出,采用常规PID控制时,系统转速有明显的波动,当受到外界施加扰动干扰时,系统恢复到原有转速需要一定的调节时间,且存在稳态误差;而使用滑模控制器控制伺服系统时,伺服系统的转速具有较好的动态性能,系统更稳定,抗干扰性更强,鲁棒性好。
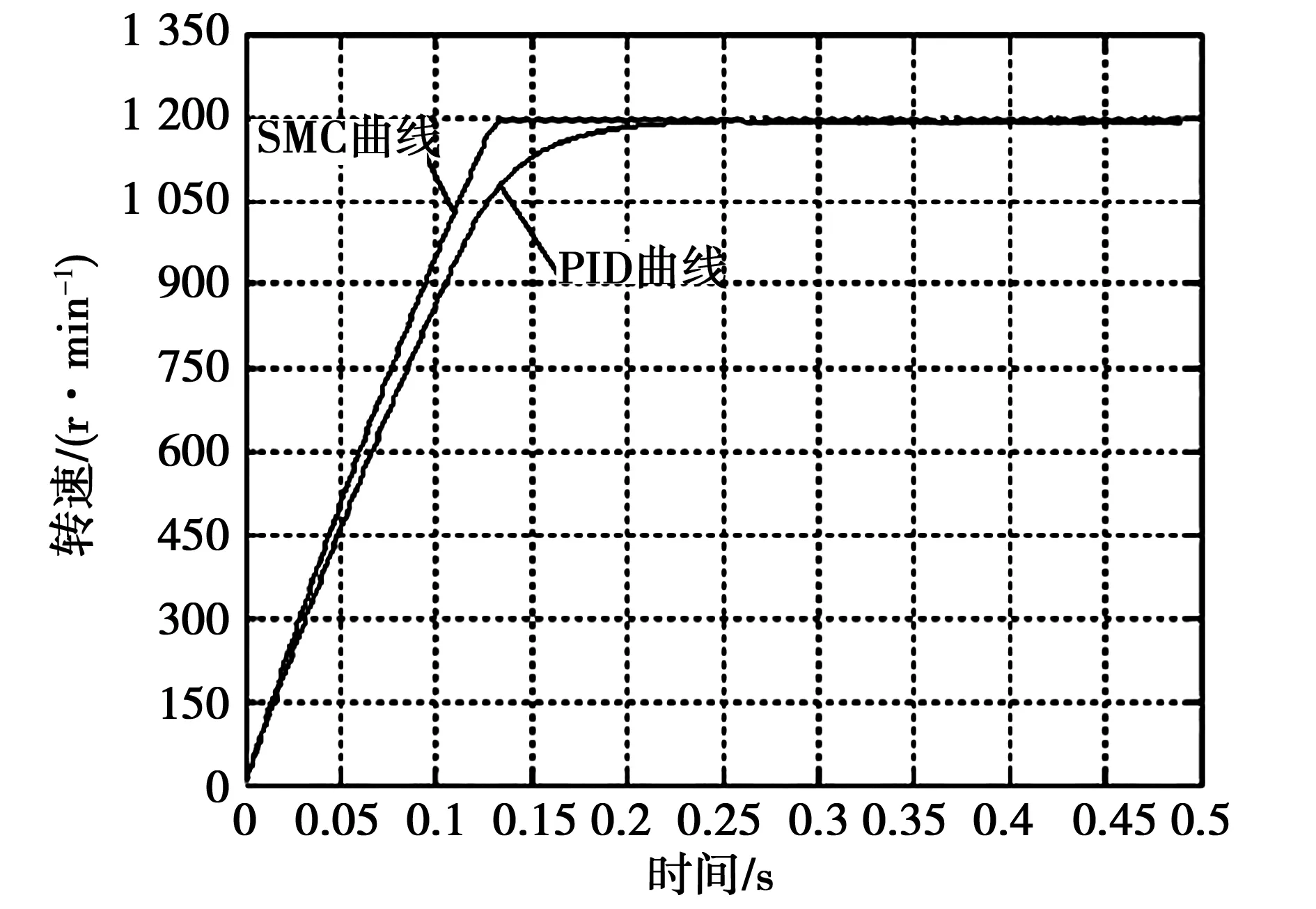
图5 PID仿真结果与SMC仿真结果对比Fig.5 Comparison of PID and SMC simulation results
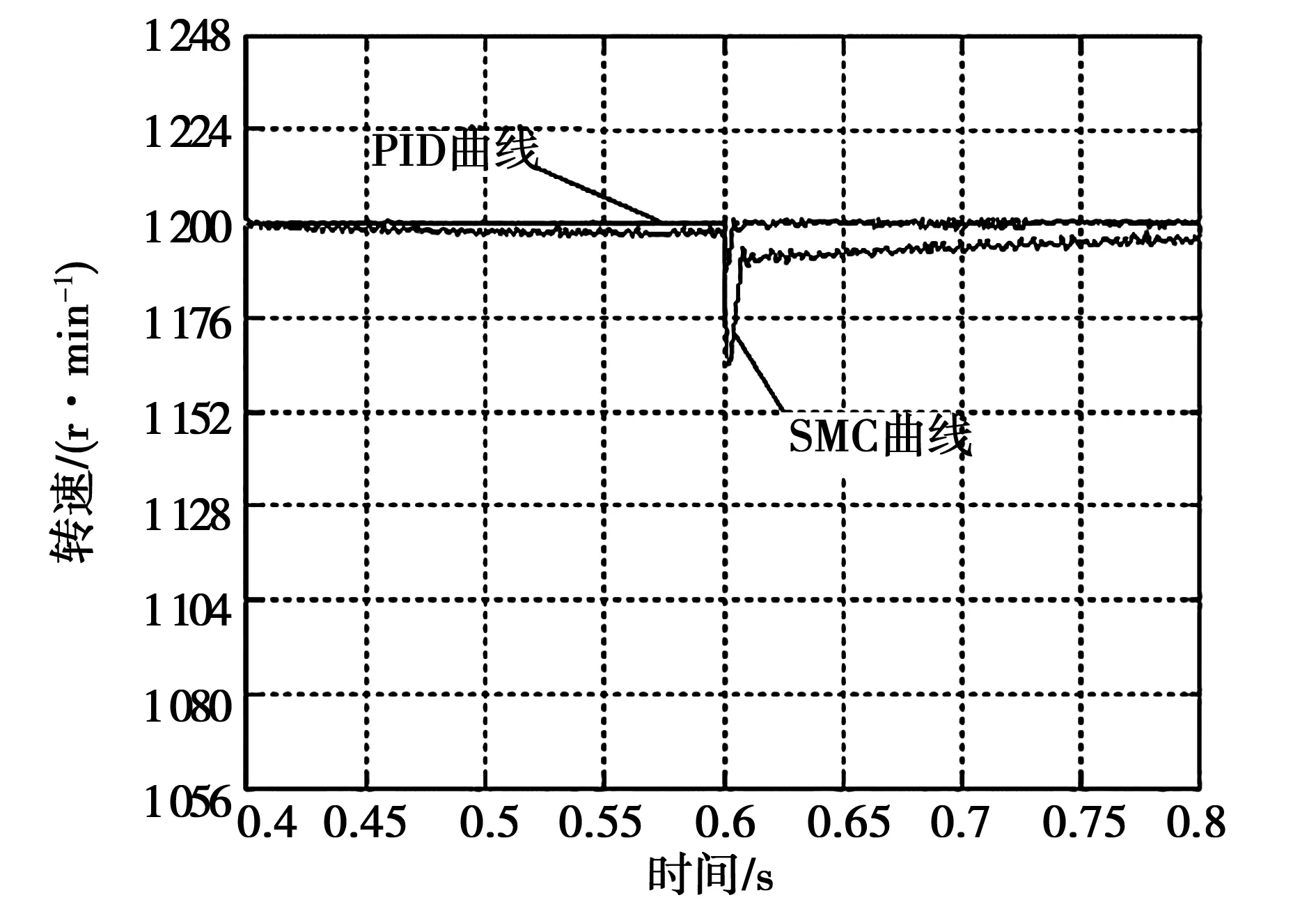
图6 PID仿真结果与SMC仿真结果对比Fig.6 Comparison of PID and SMC simulation results
由图7可以得出,电磁转矩与q轴电流成正比关系,符合式(3),转矩基本保持稳定,始终跟踪给定,不会出现转矩冲击,系统有较好的动态性能,系统的精度和快速性基本能满足要求。
3.2实验结果分析
实验中使用一台表面式永磁同步电动机,基于TMS320LF2812的DSP实验平台,电机拖动由磁粉制动器模拟的转矩负载。如图8所示,利用该DSP内部存储空间,通过串口通信的方式将实验数据由DSP传送到上位机,再通过Matlab进行数据的处理。
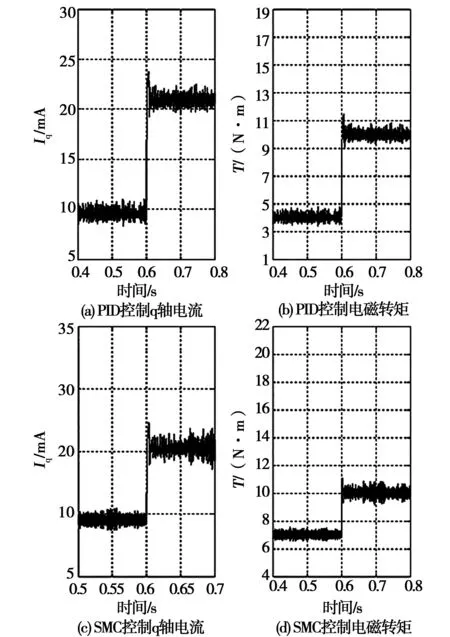
图7 电磁转矩Te与电流iq对比Fig.7 Comparison of Te and iq
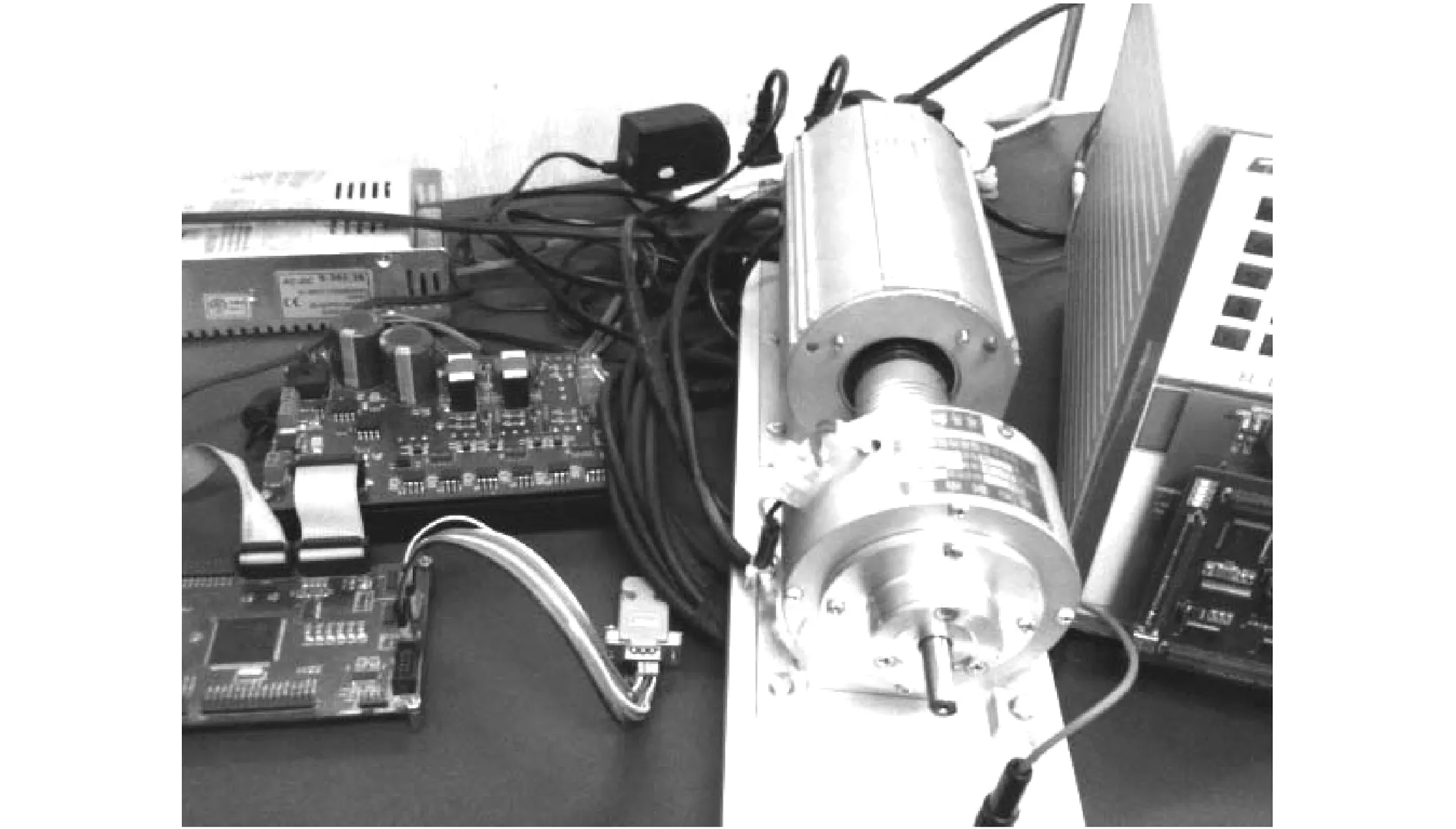
图8 基于TMS320F2812的DSP电机实验平台Fig.8 Experimental platform based on TMS320F2812
为验证本文设计的滑模控制器的稳态性能,设定电机运行状态与仿真运行状态一样,电机启动时给定速度设为标幺值0.4(1 200 r/min),实验结果如图9所示。
由图9可以看出,采用 PID控制时,电机转速启动时间需要大约0.3 s;而在使用滑模控制器控制伺服系统时,电机转速启动时间只需0.15 s左右,具有较好的动态启动性能,系统更稳定。
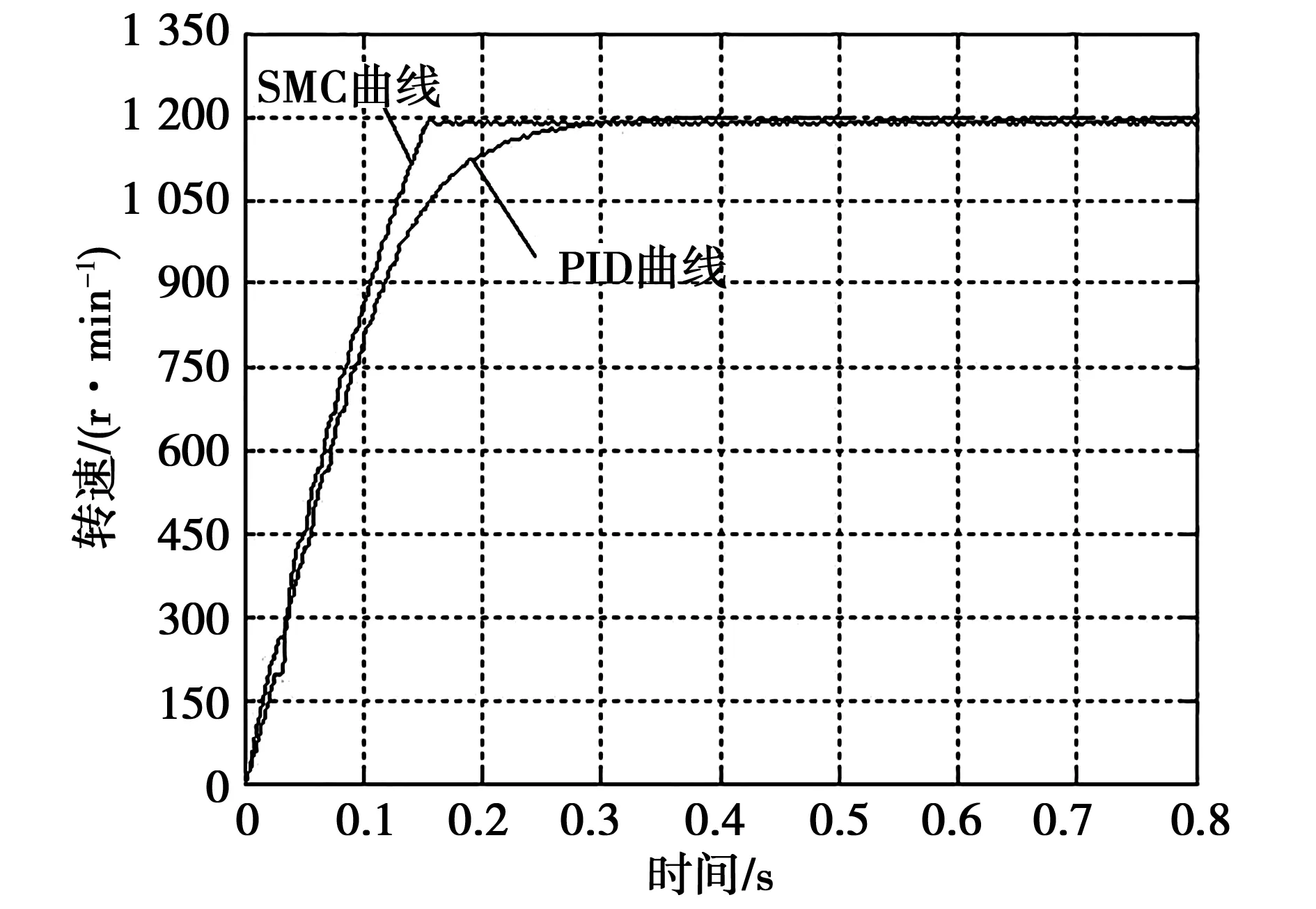
图9 PID实验结果与SMC实验结果对比Fig.9 Comparison of PID and SMC experimental results
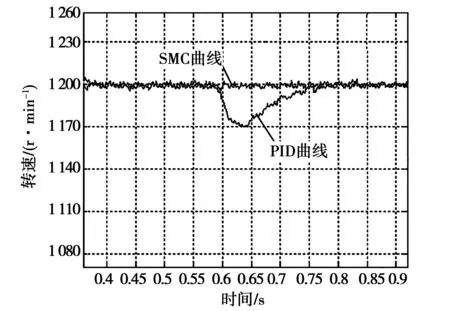
图10 PID实验结果与SMC实验结果对比Fig.10 Comparison of PID and SMC experimental results
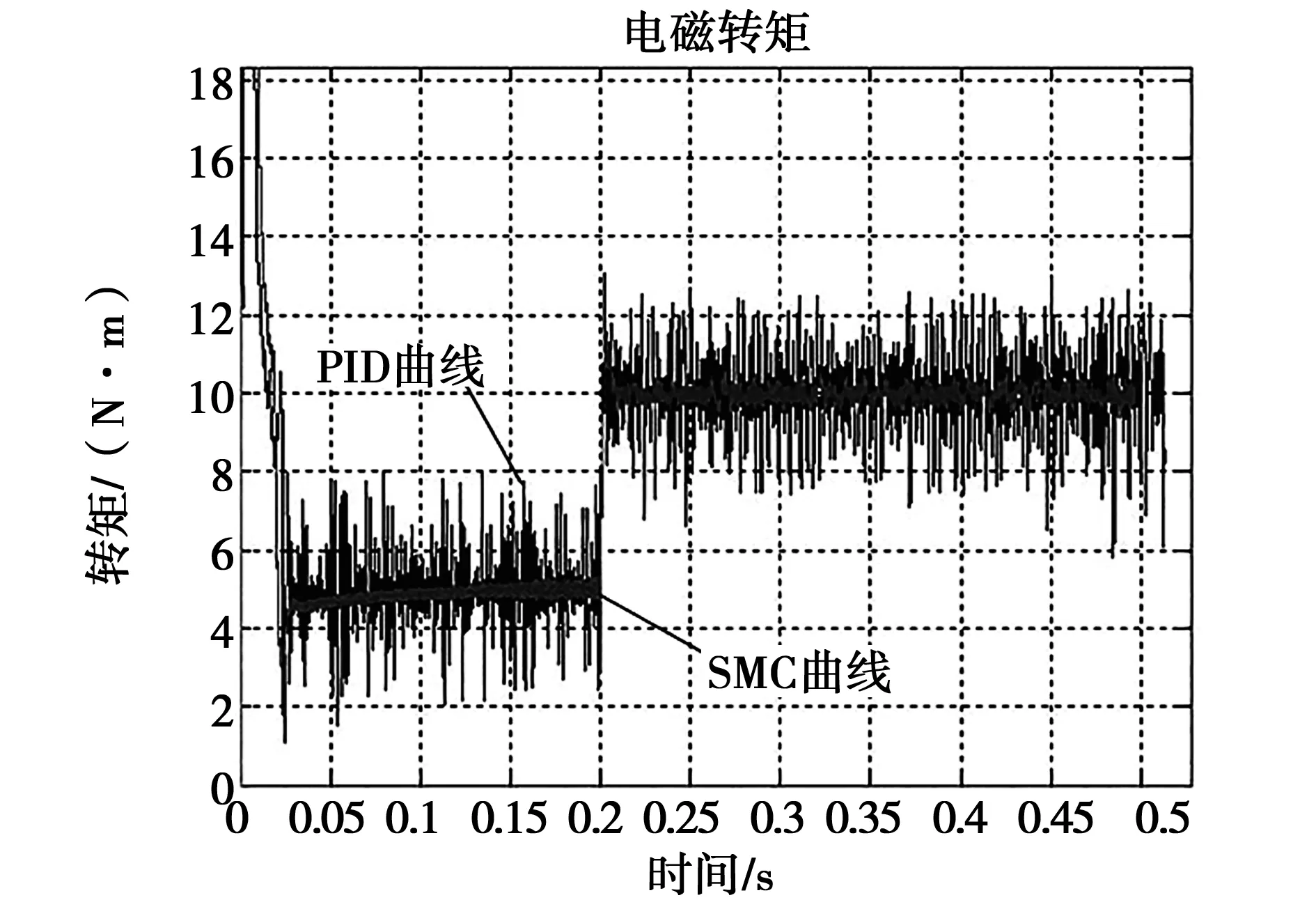
图11 PID与SMC电磁转矩结果对比Fig.11 Comparison ofelectromagnetic torque results between PID and SMC
当电机进入稳态运行之后,在t=0.6 s时刻,给电机突加负载5 N·m。图10是常规PID控制器和基于上下界滑模控制器下的永磁同步电动机速度动态抗扰响应曲线的对比图。
由响应对比波形可以明显看出,基于上下界的滑模控制较常规PID控制,具有良好的动态性能,抗干扰能力更强,鲁棒性更高。
图11中两曲线分别是给系统突变负载扰动之后,在常规PID控制器和基于上下界滑模控制器下永磁同步电动机电磁转矩的响应波形。根据响应波形可以看出,基于上下界的滑模控制较常规PID控制,电磁转矩反馈超调量小,转矩基本保持稳定,系统具有较好的动态性能,响应收敛速度更快更平稳。
4结论
本文采用基于上下界的滑模变结构速度控制器代替常规的PID控制器,通过预设负载转矩的上下界值去实时改进滑模控制率,利用改进后的控制率去实现对参考速度的跟踪控制,最终实现整个伺服系统的稳定性控制,系统响应快,消除了原系统超调现象,控制效果十分明显,该方法为提高 PMSM的调速系统的动态品质提供了一种有效途径。
参 考 文 献:
[1]刘强. 高性能机械伺服系统运动控制技术综述[J]. 电机与控制学报,2008, 12(5): 603-609.
LIU Qiang. Survey on motion control technologies of high performance mechanical servo systems [J]. Electric Machines and Control, 2008, 12(5): 603-609.
[2]童力, 邹旭东, 丰树帅,等. 基于预测无差拍算法的永磁同步发电机无传感器控制[J]. 电工技术学报,2013, 28(3): 17-26.
TONGLi, ZOU Xudong, FENG Shushuai, et al, No beat based on prediction algorithm of sensorless control of permanent magnet synchronous generator[J]. Transactions of China Electrotechnical Society,2013, 28(3): 17-26.
[3]邱鑫,黄文新,杨建飞,等.一种基于转矩角的永磁同步电机直接转矩控制[J]. 电工技术学报, 2013, 28(3): 56-62.
QIU Xin, HUANG Wenxin, YANG Jianfei,et al. A direct torque control strategy based on torque angle for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2013, 28(3): 56-62.
[4]孙强,程明,周鹗,等.新型双凸极永磁电机调速系统的变参数PI控制[J].中国电机工程学报,2003,23(6):117-122.
SUN Qiang, CHENG Ming, ZHOU E, et al. New type of doubly salient permanent magnet motor speed control system of variable parameter PI control [J]. Proceedings of the CSEE,2003, 23(6): 117-122.
[5]姜静, 伍清河.滑模变结构控制在跟踪伺服系统中的应用 [J].电机与控制学报,2005,9(6):562-565.
JIANGJing, WU Qinghe. Sliding-mode variable structure control for the tracking servo system [J]. Electric Machines and Control, 2005, 9(6): 562-565.
[6]张昌凡,王耀南,何静.永磁同步伺服电机的变结构智能控制[J].中国电机工程学报,2002,22(7):13-17.
ZHANG Changfan, WANG Yaona, HE Jing. Permanent magnet synchronous servo motor intelligent variable structure control [J]. Proceedings of the CSEE,2002, 22(7):13-17.
[7]CHEN J Y. Expert SMC-base fuzzy control with genetic algorithms[J].Journal of the Franklin Institute, 1999, 336(4): 589-610.
[8]PARMA G, MENEZES BR, BRAGA A P,et al.Sliding mode neural network control of an induction motor drive[J].International Journal of Adaptive Control and Signal Processing, 2003, 17(6):501-508.
[10]卢达,赵光宙,曲轶龙,等.永磁同步电机无参数整定自抗扰控制器 [J]. 电工技术学报. 2013, 28(3): 27-34.
LU Da, ZHAO Guangzhou, QU Yilong,et al.Permanent magnet synchronous motor control system based on no manual tuned active disturbance rejection control[J]. Transactions of China Electrotechnical Society,2013, 28(3): 27-34.
[11]李永坚, 许志伟, 彭晓. SRM积分滑模变结构与神经网络补偿控制[J].电机与控制学报, 2011, 15(1): 33-37, 43.
LI Yongjian, XU Zhiwei, PENG Xiao. The hybrid control of SRM based on sliding-mode variable structure control with integral action and neural network compensation [J]. Electric Machines and Control, 2011, 15(1): 33-37,43.
[12]LI Yanjun, ZHANG Ke, WANG Hongmei. Adaptive control theory and application[M].西安:西北工业大学出版社,2010.
[13]张建国.永磁电机调速系统的滑模变结构控制[D]. 山东大学,2007.
[14]张美东,黄志钢.永磁电机调速系统的滑模变结构控制[J].数字技术与应用,2011:8-9.
ZHANGMeidong, HUANG Zhigang. Sliding mode variable structure control of permanent magnet motor speed regulating system [J]. Journal of Digital Technology and Application,2011:8-9.
[15]史涔溦,邱建琪,金孟加. 永磁同步电机直接转矩控制方法的比较研究[J].中国电机工程学报,2005, 25(16):141-146.
SHI Cenwei, QIU Jianqi, JIN Meng. Permanent magnet synchronous motor direct torque control method of the comparative study[J].Proceedings of the CSEE,2005, 25(16): 141-146.
[16]杨文强,蔡旭,姜建国. 矢量控制系统的积分型滑模变结构速度控制[J]. 上海交通大学学报,2005, 39(3): 426-432.
YANG Wenjiang, CAI Xu, JIANG Jianguo. Vector control system of the integral type sliding mode variable structure speed control[J].Journal of Shanghai Jiaotong University, 2005, 39(3): 426-432.
[17]张晓光,赵克,孙力,等.永磁同步电动机滑模变结构调速系统新型趋近率控制[J]. 中国电机工程学报,2011, 31(24): 77-82.
ZHANG Xiaoguang, ZHAO Ke, SUN Li,et al.Permanent magnet synchronous motor speed control system based on sliding mode variable structure new near rate control[J]. Proceedings of the CSEE,2011, 31(24): 77-82.
(编辑:刘琳琳)
Robust control of synchronous motor based on sliding mode variable structure
CUI Jia-rui1,GAO Jiang-feng1,ZHANG Bo2,LI Qing1
(1. School of Automation and Electrical Engineering, University of Science and Technology Beijing, Beijing 100083, China; 2. China Electric Power Research Institute, Beijing 100192, China)
Abstract:A sliding mode variable structure speed controller was proposed for surface permanent magnet synchronous motor in order to overcome the drawback of conventional PID speed controller,to effectively curb the state variables of overshoot problems, to speed up the convergence speed of the rotor, and to enhance the anti-interference of the system. Unlike conventional PID speed controller, the controller associated speed error with the quantity of system state. The load torque values is real-time controlled by the default upper and lower bounds sliding mode variable structure controller. It can replace the conventional PID controller with the applications to the permanent magnet synchronous motor vector control system. Simulation and experimental results show that sliding mode variable structure controller based on the upper and lower bounds can effectively improve the static and dynamic characteristics and robustness of the system.
Keywords:surface permanent magnet synchronous motor; upper and lower bound; controller; sliding mode variable structure
收稿日期:2015-02-03
基金项目:国家自然科学基金(61304087,61372090,61104062,11371053);北京市青年英才计划(YETP0376);中央高校基本科研业务费(FRF-TP-15-059A3)
作者简介:崔家瑞(1982—),男,博士,高级工程师,研究方向为二维随机系统控制、系统辨识等;高江峰(1989—),男,硕士研究生,研究方向为电机控制算法;
通讯作者:李擎
DOI:10.15938/j.emc.2016.05.012
中图分类号:TM 315
文献标志码:A
文章编号:1007-449X(2016)05-0084-06
张波(1984—),男,博士,高级工程师,研究方向为配电管理系统等;
李擎(1971—),男,博士,教授,博士生导师,研究方向为智能控制算法。