三维激光扫描仪测量精度的快速检查方法
2016-06-08段龙飞李培现李雪松谢艳清詹佳琪
段龙飞,李培现,李雪松,谢艳清,詹佳琪
(中国矿业大学(北京),北京 100083)
三维激光扫描仪测量精度的快速检查方法
段龙飞,李培现,李雪松,谢艳清,詹佳琪
(中国矿业大学(北京),北京 100083)
[摘要]地面三维激光扫描仪作为一种高精密的测量仪器,可以为测绘等领域提供海量基础数据。为了实时快速对其测量精度进行检验,基于实践经验,在应用重心类方法获取球体中心坐标信息的基础上,通过对比高精度全站仪和三维激光扫描仪相应数据,对三维激光扫描仪的点位精度、测距精度和点云拼接精度进行了快速检验。
[关键词]三维激光扫描仪;点位精度;测距精度;点云拼接精度;检校
Rapid Detection Method of Point Precision of 3-D Laser Scanner
地面三维激光扫描仪具有快速获取海量点云数据的能力,为测绘等领域提供基础数据。现今主流的地面三维激光扫描仪如拓普康GLS-2000的测量精度为4mm@150m,徕卡P20为6mm@100m,FARO X330为2mm@25m等,精度可以达到毫米级[1- 2]。但是,扫描仪在获取数据时不可避免地会产生误差,误差来源主要有3种:仪器系统误差、目标反射物产生的误差和外部环境造成的误差[3]。仪器系统误差必须通过日常的仪器检校工作使其影响最小化。因此,当地面三维激光扫描仪经过长时间使用、磨损、震动或其他原因导致其测量精度降低甚至发生测量错误时,必须对地面三维激光扫描仪做定期精度检校工作。
目前国内针对地面三维扫描仪的测距检测方法比较单一,通常采用六段解析法来检定三维激光扫描仪的测距精度。六段解析法是一种不需要知道基线的精确长度,而采用全站仪本身的测量成果,通过间接平差计算求出加常数K的方法。它不受对中误差及乘常数的影响。该方法对于测距精度的检验精度较高,但是相对比较繁琐。国内的许多学者对六段解析法进行了研究,如蔡庆生应用六段解析法检定了徕卡 C10的精度满足出厂的精度要求[4];谢宏泉采用六段解析模型,并通过Matlab编程验证了徕卡 C10在50m测距范围内和50m测距范围外的测距精度变化规律[5];刘春分析了激光扫描仪的主要误差来源,介绍了三维激光扫描仪的检校原理和方法,从测距、测角、大气影响等方面,对激光扫描仪的精度进行测试和评定[6];冒爱泉利用高精度基线场,通过基线比较计算扫描仪的加、乘常数,给出误差改正模型[7];张启福提出了基于简易六段解析法的测距精度检校方法,并通过RIEGL VZ-400验证了该方法的精度[8]。本文通过三维激光扫描仪扫描特定靶标球,应用重心类方法获得球体的中心位置信息,然后将获得的目标点位置求差获得斜距值,通过对比不同基线之间的斜距值来分析扫描仪的距离观测精度,从而达到快速检验地面三维激光扫描仪点云数据精度的目的。
1试验方案
针对工程应用中的实际问题,本文进行了仪器的测距精度、点云拼接精度和靶标精度的快速检校。由于三维激光扫描仪具有3种扫描模式:点云扫描、靶标扫描和棱镜扫描。根据各种扫描的特点,在点位精度检验时采用点云扫描模式,以更好地获取靶标中心位置信息。
1.1点位精度检验
1.1.1点位精度检校试验平台的设计
选择140mm直径的靶标及其配套的棱镜作为扫描仪及全站仪观测的目标对象[9-11]。为了保证靶标能够平稳地放在凹陷区域,同时保证扫描仪可以获得足够点云数据来拟合中心位置坐标,试验设计了一个下向凹陷的磁块作为支撑台,凹陷的部分保证与靶标相互吻合。如图1所示黑色长方体为磁性支架,圆形为靶标,测站位置上架设扫描仪并对中整平。①号靶标作为基准点,②、③和④号靶标作为检校点。①号点和③号点之间的角度保持在45~90°之间。
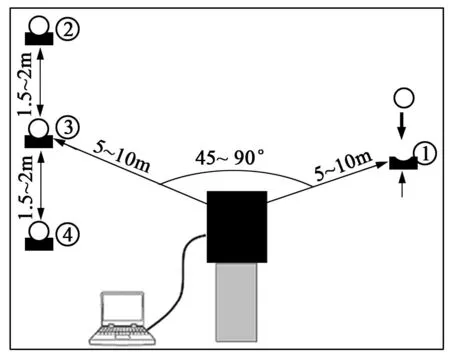
图1 点位精度检验设计台
1.1.2靶标中心位置坐标提取方法
(1)初次拟合平面
平面的一般方程表达式为:
z=a0x+a1y+a2
(1)
令S最小,则:
(2)
即
(3)
解此可求出a0,a1,a2,即可求出平面的表达式。
(2)噪声点剔除
(3)拟合平面
噪声点剔除后的数据再次拟合平面,过程同初次拟合平面。
(4)重心类提取中心坐标
取所有点云坐标数据的平均值为靶标的中心坐标值,即
(4)
1.1.3点位测量精度检验
首先将靶标放置在①号点位置上,扫描①号点获取球面点云数据,通过软件处理拟合出球体中心位置信息。然后再顺序扫描②、③和④号点位置,获取②、③和④号球体的中心位置信息。取下扫描仪,放置全站仪并对中整平。类似地分别在①、②、③和④位置上放置配套棱镜(球形靶标和球型棱镜的半径大小相等,以保证获取的点位坐标一致),顺序观测4个棱镜位置,记录全站仪的观测值。为了减少观测误差,采用多次观测取平均值作为真实的观测值。
以全站仪数据为基准,通过比较其与1.1.2节计算所得靶标中心坐标数据,对点位测量精度进行检校。
1.2测距精度检验
依据点位精度检验计算所得中心坐标,计算各个点之间的距离,并与全站仪计算所得相应点间距进行对比分析,若互差超过限值,则仪器测距精度不达标,应进行重新检校。
1.3点云拼接精度检验
选取具有一些明显特征点的空地,采用测站/后视的扫描方式逐站扫描并获取三维点云数据和影像数据。在影像数据上选取并标注路面上的特征点[13]。使用高精度全站仪观测已标注特征点,获取其坐标数据。然后对点云数据进行后处理,提取特征点的三维坐标信息,将其与全站仪观测值进行对比分析,若两者最大差值超过限值,则点云拼接精度不满足工程需要。
2试验数据
试验选用拓普康的GLS-1500地面三维激光扫描仪和1″级高精度全站仪。GLS-1500地面三维激光扫描仪的测距精度为4mm@150m,靶标测量精度为6mm@50m。
2.1点位精度检验
使用三维激光扫描仪分别扫描1号点(Pt1)、2号点(Pt2)、3号点(Pt3)和4号点(Pt4)获取球面点云数据,应用重心类方法获取拟合点的中心坐标。利用全站仪获取球体中心坐标值,两者之间的差值见表1。
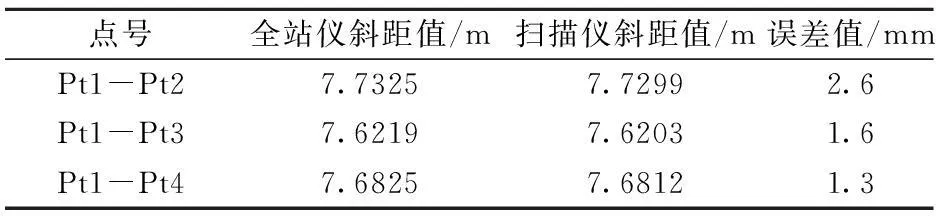
表1 位置观测误差值
通过求取两种手段获取的基准点和检校点的中心坐标的差值来判断地面三维激光扫描仪点位精度。通过对比数据可以得出,地面三维激光扫描仪的点位精度满足其标称精度,可以进行正常的工程应用数据采集工作。
2.2测距精度分析
使用地面三维激光扫描仪的靶标测量功能,顺序获取所有靶标位置0号点(Pt0)、1号点(Pt1)、2号点(Pt2)、3号点(Pt3)和4号点(Pt4)的三维坐标信息,记录靶标观测量。通过点位距离计算公式计算基准点和离散靶标点之间的斜距值,见表2。

表2 靶标测量距离值 m
使用全站仪顺序观测所有靶标位置的三维坐标信息,通过点位距离计算公式计算基准点和离散靶标点之间的斜距值,见表3。
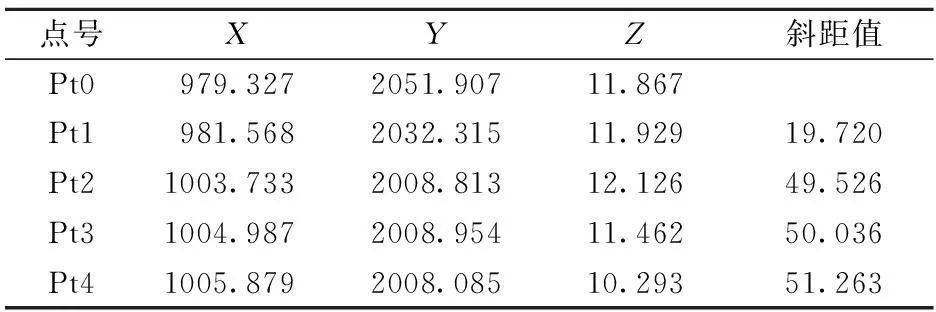
表3 全站仪原始观测值及斜距离值 m
对比分析靶标观测量的斜距值与全站仪观测量的斜距值,见表4。
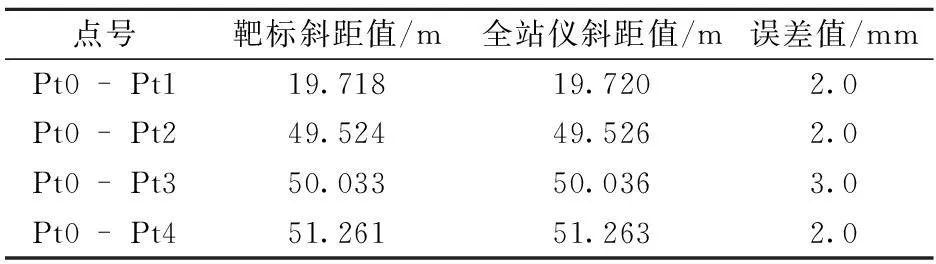
表4 靶标与全站仪观测量的斜距值对比
通过求取两种手段获取的基准点和检校点之间的距离的差值来判断地面三维激光扫描仪测距精度。通过对比数据可以得出,地面三维激光扫描仪的点位精度与拓普康GLS-1500的测距精度相差不大,满足其标称精度,可以进行正常的工程应用数据采集工作。
2.3点云配准精度检验
点云配准是指把不同坐标系统下的点云坐标转换到统一的坐标系下。在摄影测量中,匹配的方法是在像方找到相邻影像的同名点,再映射到空间方,解算出相邻模型的空间相似变换参数,以此拼接影像。通过此方法来进行点云配准,需要保证有精度足够好的公共靶标点云坐标。但是由于地面三维扫描仪本身精度的局限性,设站位置的不同,外界环境的影响,公共靶标中心反射率的强弱、靶标的材质和粘贴、靶心提取的误差等因素,都会影响点云数据的拼接精度[14]。按照测站后视的方法依次分站扫描路面,获得7站扫描数据,见图2。
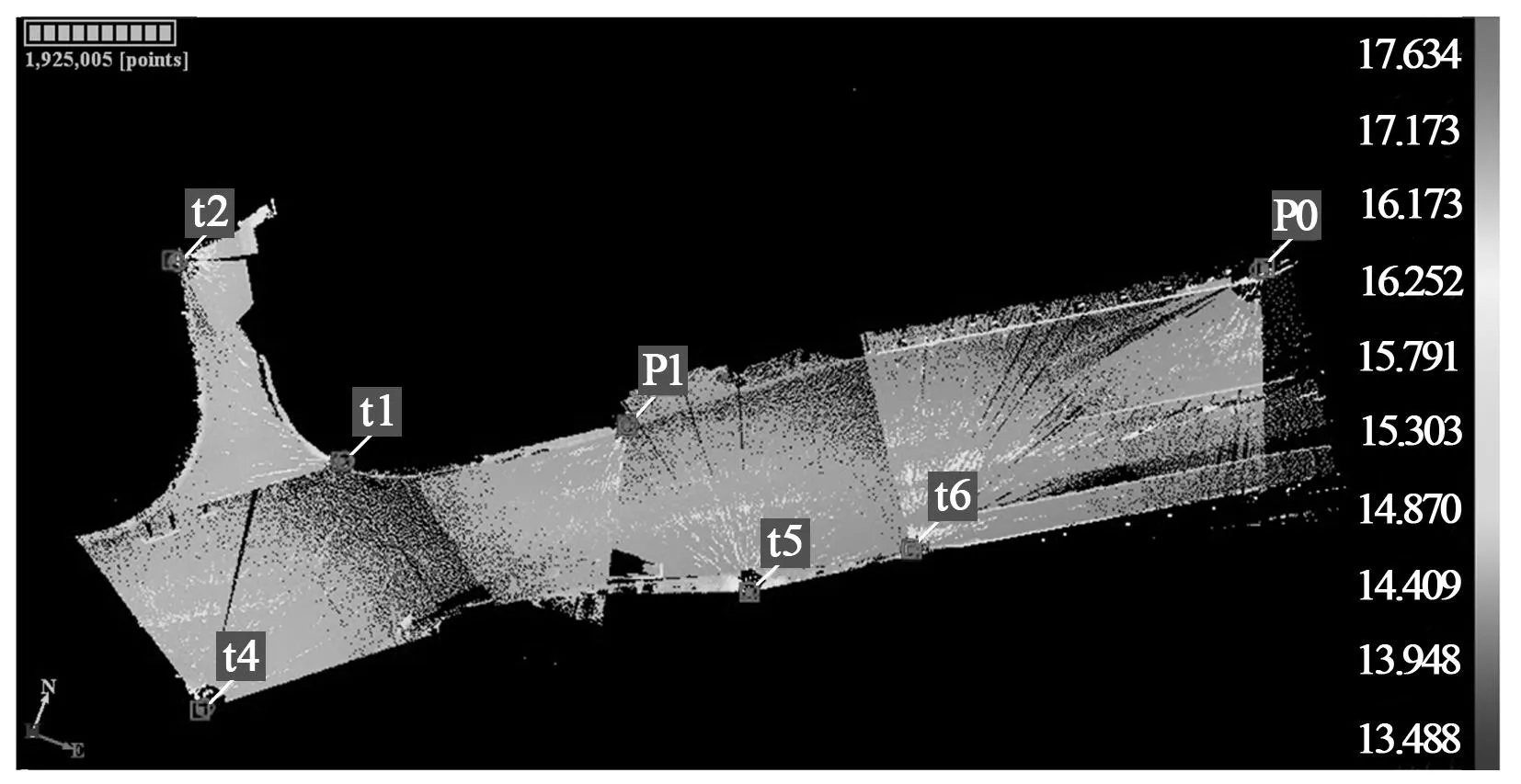
图2 拼接后的点云数据
通过影像数据选取清晰可辨的特征点(Control Point,简称CP),利用全站仪或者GPS获取路面特征点数据,见表5。
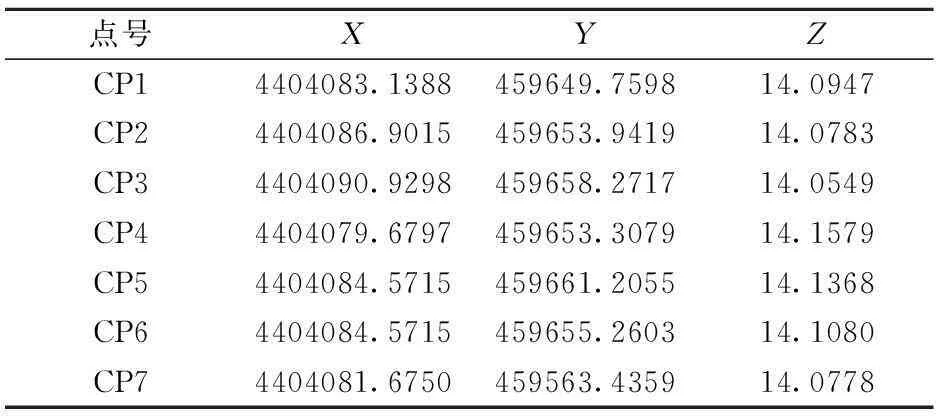
表5 检验点坐标 m
将点云数据和影像数据融合,获得带RGB色的点云数据,再将GPS观测的特征点数据导入至点云数据中,其位置关系如图3所示。
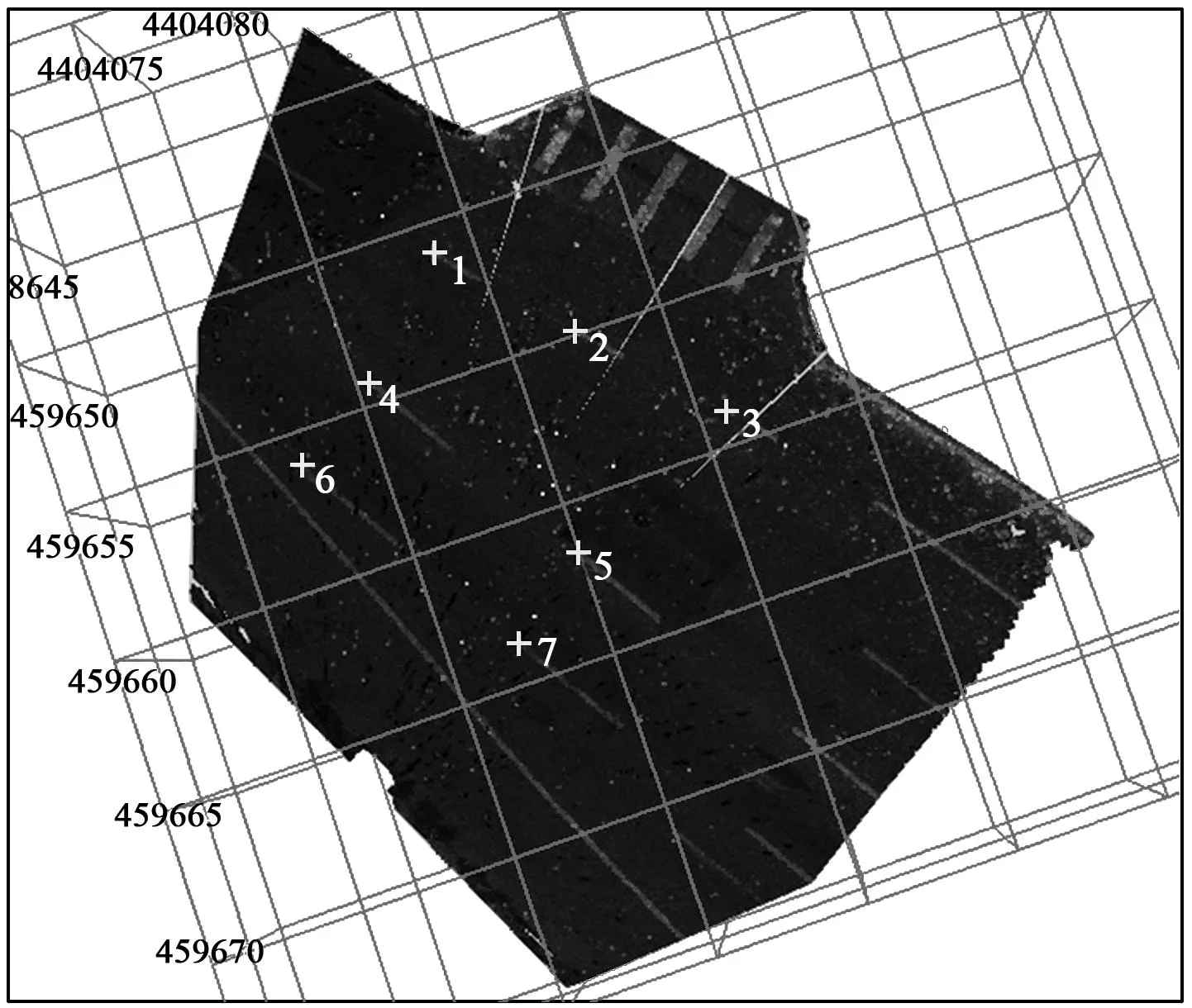
图3 特征点信息对比
通过量测功能,量取GPS仪获取的特征点数据和点云对应的特征点数据在X,Y和Z3个方向的误差值,如表6所示。
路面特征点数据在X,Y和Z3个方向的中误差值分别为0.0238m,0.0273m和0.0016m,拼接后的成果满足一般工程产品的制作精度要求,可以进行正常的工程应用数据采集工作。
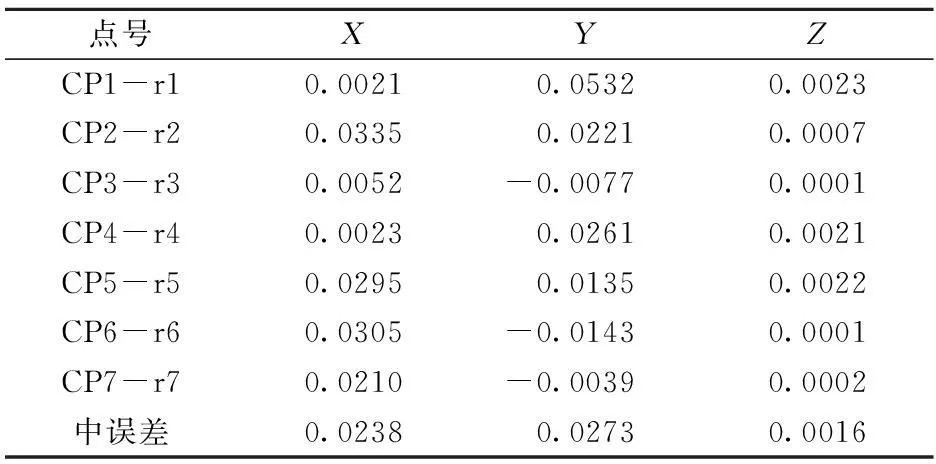
表6 数据精度对比 m
3结 论
以1″级高精度全站仪所测数据为基准,基于重心类方法提取出靶标中心位置信息,通过设计简易的检测平台,对三维激光扫描仪精度进行了检验,从而达到了快速检验三维激光扫描仪精度的目的,为地面三维激光扫描仪精度的定期检验提供了一种有效的解决方法。
[参考文献]
[1]刘春,张蕴灵,吴杭彬.地面三维激光扫描仪的检校与精度评估[J].工程勘察,2009,37(11):56-60,66.
[2]陈允芳,叶泽田,谢彩香,等.IMU/DGPS辅助车载CCD及激光扫描仪三维数据采集与建模[J].测绘科学,2006,31(5):91-92,77.
[3]陈俊杰,闫伟涛.基于激光点云的平面靶标中心坐标提取方法研究[J].工程勘察,2013,41(8):53-57.
[4]蔡庆生.地面三维激光扫描仪测距检校与精度评定[J].测绘与空间地理信息,2015,38(1):217-221.
[5]谢宏全,高祥伟,邵洋.地面三维激光扫描仪测距精度检校试验研究[J].测绘通报,2013(12):25-27.
[6]刘春,杨伟.三维激光扫描仪对构筑物的采集和空间建模[J].工程勘察,2006,34(4):49-53.
[7]冒爱泉,朱益虎,郝思宝,等.地面三维激光扫描仪精度测评方法和误差改正模型研究[J].测绘通报,2014(2):72-75.
[8]张启福,孙现申,王力.基于简易六段法的RIEGL VZ-400激光扫描仪精度测试方法研究[J].工程勘察,2011,39(3):63-66,81.
[9]Yuriy Reshetyuk,Milan Horemuz,Lars E.Sioberg Determination of the optimal diameter for spherical targets used in 3D laser scanning,Survey Review,2005,38(297):243-253.
[10]Balzani,M.,Pellegrinelli,A.,Perfetti,N.and Uccelli,F.,2001.A terrestrial laser scanner: accuracy tests.Proceedings of 18thInternational Symposium CIPA 2001,Potsdam(Germany),September 18-21:445-453.
[11]Shultz,T.and Ingensand,H.,2004.Terrestrial Lalser scanning-Investigations and Applications for High Precision Scanning.Proceedings of FIG Working Week,Athens,Greece,May 22-27.http://www.fig,net/pub/athens/.
[12]官云兰,詹新武,程效军,等.一种稳健的地面激光扫描靶标球定位方法[J].工程勘察,2008,36(10):42-45,49.
[13]梁建军,范百兴,邓向瑞,等.三维激光扫描仪球形靶标测量方法与精度评定[J].工程勘察,2011,39(2):81-84.
[14]王研,张晓林,李晓飞,等.影像密集匹配技术辅助三维激光扫描仪对点云的提取[J].测绘技术装备,2014,16(4):81-83.
[15]程效军,施贵刚,王峰,等.点云配准误差传播规律的研究[J].同济大学学报(自然科学版),2009,37(12):1668-1672.
[责任编辑:施红霞]
靶标中心坐标提取过程步骤为:初次拟合平面;噪声点剔除;拟合平面;重心类提取中心坐标。
[收稿日期]2015-08-31
[基金项目]中国矿业大学(北京)大学生创业训练项目(201511413077);中国矿业大学(北京)大学生创新训练项目(C201502027)
[作者简介]段龙飞(1985-),男,山西长治人,在读博士生,从事3S及其应用研究。
[中图分类号]TD172
[文献标识码]B
[文章编号]1006-6225(2016)02-0114-04
[DOI]10.13532/j.cnki.cn11-3677/td.2016.02.030
[引用格式]段龙飞,李培现,李雪松,等.三维激光扫描仪测量精度的快速检查方法[J].煤矿开采,2016,21(2):114-117.
