基于特征匹配的机载激光雷达安置参数检校方法
2021-04-05钟振陈良良谢国栋
钟振 陈良良 谢国栋

摘 要:机载激光雷达(LiDAR)是一种集成激光、全球导航卫星系统和惯导系统的多传感器移动测量系统,系统精度受多个因素影响,不仅取决核心传感器精度,还受到激光与IMU的安置参数影响。对低成本的多线激光雷达进行研究,分析激光雷达定位原理和安置参数的影响,提出一种基于特征匹配的检校方法。通过不同航带的点云进行特征匹配,计算出航带间的偏移,根据偏差与安置参数的关系求出安置参数,实验证明该方法能够有效消除安置误差影响。
关键词:激光雷达;检校;特征匹配;安置角
中图分类号:TP391.4;TN958.98 文献标识码:A 文章编号:2096-4706(2021)17-0082-06
Abstract: Airborne Laser Radar (Lidar) is a multi-sensor mobile measurement system integrating laser, global navigation satellite system and inertial navigation system. The accuracy of the system is affected by many factors, it depends not only on the accuracy of the core sensor, but also on the placement parameters of the laser and IMU. Research on low-cost multi-line Lidar, analyze Lidar positioning principle and the influence of placement parameters, and propose a calibration method based on feature matching. Through feature matching of point clouds of different flight belts, the offset between the flight belts is calculated, and the placement parameters are calculated according to the relationship between the deviation and the placement parameters. The experiment proves that this method can effectively eliminate the impact of placement errors.
Keywords: Lidar; calibration; feature matching; placement angle
0 引 言
機载激光雷达LiDAR(Light Detection and Ranging)是一种集成激光、全球导航卫星系统(GNSS)和惯导系统(INS)的高精度三维测量系统,搭载飞行平台进行扫描,能够直接获取扫描物体的坐标,具有精度高、外业工作量小、可夜间作业、可穿透植被等优点[1],被应用在测绘、林业、电力等行业。在20世纪90年代起机载激光雷达开始成熟,国外Optech、Leica、Riegl、TopoSYS等公司先后推出机载产品,国内21世纪初国内开始引进国外的LiDAR系统,例如,中国海监队2006年引进Leica公司的ALS50I,北京天地信息科技有限公司2006年引进Optech公司的ALTM3100,等等[2],但这些传统单线激光雷达系统大多非常昂贵动辄几百上千万,而且设备非常笨重需要搭载有人机进行飞行,成本过高限制其应用发展。近年来随着低成本的多线激光器出现,例如Velodyne、Quanergy、禾赛、速腾等多线激光器,加上无人机的快速发展,无人机搭配低成本多线激光雷达应运而生,在众多领域里快速发展,例如电力巡检、公路勘测、林业调查、测绘、遥感等[3-8]。机载激光雷达为高精度测量系统,影响系统精度的因素有很多,除了传感器本省精度外对激光与IMU的安置参数进行检校尤为重要[9]。目前国内外大部分的论文都是针对单线激光进行安置检校,针对低成本的多线激光器则很少,例如Jan Skaloud等提出了基于目标点的严格方法计算机载激光雷达的标定参数[10];R.Le Scouarnec等提出一种基于静态测量避免GPS误差的标定方法[11];张小红提出利用规则几何体的重心偏差来计算安置角[12];章大勇等通过激光雷达的反射强度确定检测控制区,根据激光矢量测量方程,利用最小二乘法计算安置角[13]。
本公司基于多线激光器和惯导系统研究低成本的机载激光雷达系统集成应用,为了提升系统精度提出一种基于特征匹配的安置参数检校方法,该方法通过LiDAR不同航带生成的点云偏差与安置参数的关系计算出对应参数,能够快速完成系统检校。
1 机载LiDAR定位原理
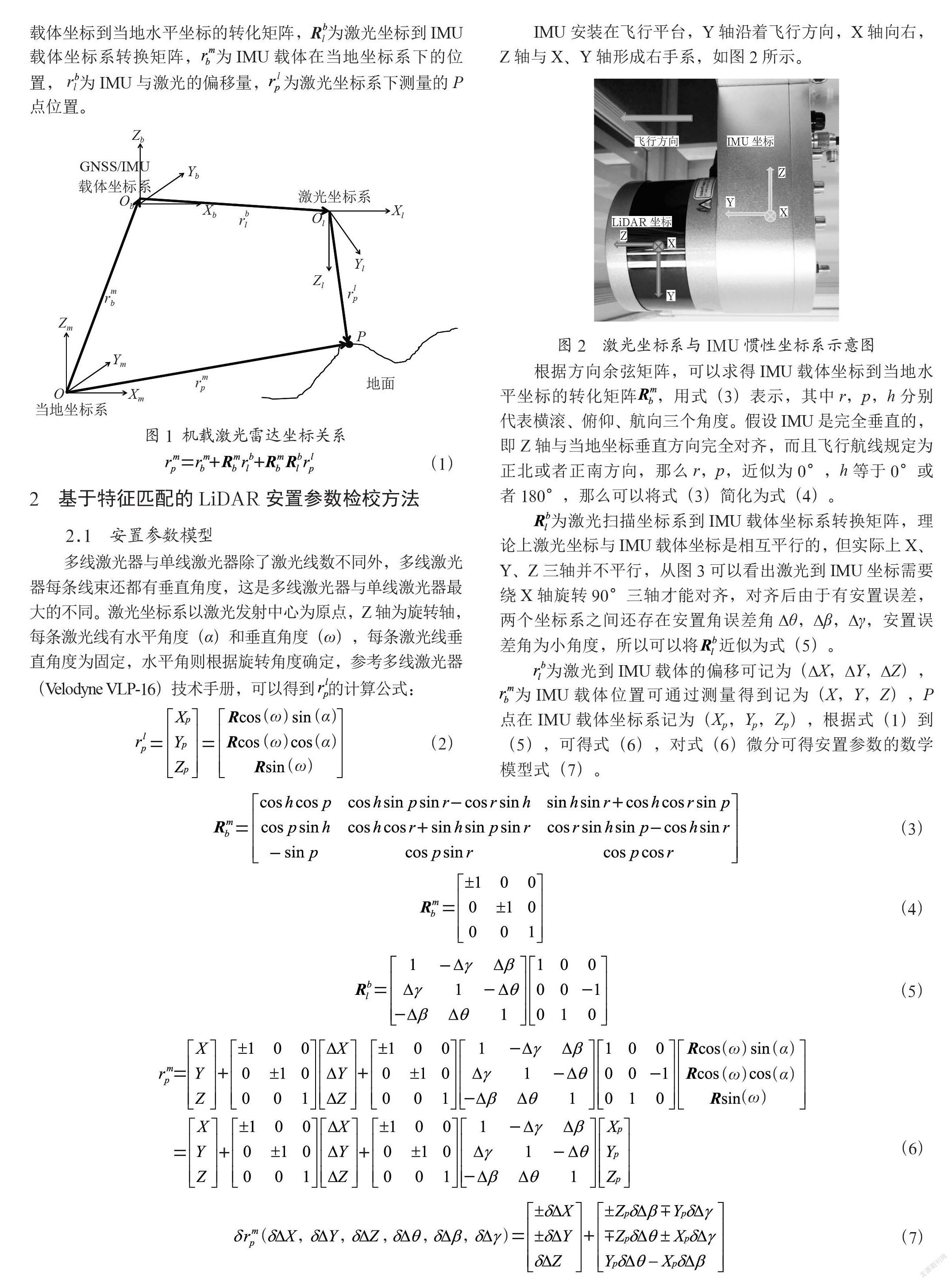
机载LiDAR是一种多传感器集成系统,每个传感器坐标系都不一样,系统进行测量工作时需要根据对应的数学模型将激光器扫描获取的数据转换成三维空间坐标,再经过一系列的坐标转换生成具有地理参考信息的激光点云数据。机载LiDAR采用的是直接定位DG(Direct-Georeferencing)方式进行激光脚点坐标计算,计算过程涉及激光坐标系、IMU载体坐标系、当地水平坐标系,如图1所示,XmYmZm为当地水平坐标系,XbYbZb为IMU载体坐标系,XlYlZl为激光坐标系。具体的数学模型如式(1)所示,其中为IMU载体坐标到当地水平坐标的转化矩阵,为激光坐标到IMU载体坐标系转换矩阵,为IMU载体在当地坐标系下的位置, 为IMU与激光的偏移量,为激光坐标系下测量的P点位置。
2 基于特征匹配的LiDAR安置参数检校方法
2.1 安置参数模型
多线激光器与单线激光器除了激光线数不同外,多线激光器每条线束还都有垂直角度,这是多线激光器与单线激光器最大的不同。激光坐标系以激光发射中心为原点,Z轴为旋转轴,每条激光线有水平角度(α)和垂直角度(ω),每条激光线垂直角度为固定,水平角则根据旋转角度确定,参考多线激光器(Velodyne VLP-16)技术手册,可以得到 的计算公式:
IMU安装在飞行平台,Y轴沿着飞行方向,X轴向右,Z轴与X、Y轴形成右手系,如图2所示。
根据方向余弦矩阵,可以求得IMU载体坐标到当地水平坐标的转化矩阵,用式(3)表示,其中r,p,h分别代表横滚、俯仰、航向三个角度。假设IMU是完全垂直的,即Z轴与当地坐标垂直方向完全对齐,而且飞行航线规定为正北或者正南方向,那么r,p,近似为0°,h等于0°或者180°,那么可以将式(3)简化为式(4)。
为激光扫描坐标系到IMU载体坐标系转换矩阵,理论上激光坐标与IMU载体坐标是相互平行的,但实际上X、Y、Z三轴并不平行,从图3可以看出激光到IMU坐标需要绕X轴旋转90°三轴才能对齐,对齐后由于有安置误差,两个坐标系之间还存在安置角誤差角?θ,?β,?γ,安置误差角为小角度,所以可以将近似为式(5)。
为激光到IMU载体的偏移可记为(?X,?Y,?Z), 为IMU载体位置可通过测量得到记为(X,Y,Z),P点在IMU载体坐标系记为(Xp,Yp,Zp),根据式(1)到(5),可得式(6),对式(6)微分可得安置参数的数学模型式(7)。
2.2 安置参数影响分析
通过对式(7)各项进行分离来分析各个参数的影响,定义Xm为飞行方向右,Ym为飞行方向,Zm为垂直方向。对于?X只影响Xm,具体为±δ?X,正负号取决于飞行方向;?Y只影响Ym,具体为±δ?Y,正负号取决于飞行方向;?Z只影响Zm,具体为δ?Z,与飞行方向无关。通过往返两条航带,扫描平行和垂直飞行方向的垂直平面进行计算可以求出?X和?Y,?Z无论飞行方向如何都往同一方向需要辅助控制点才能求出。
而对于三个安置误差角,俯仰角?θ影响Ym与Zm,分别为?Zpδ?θ和Ypδ?θ;翻滚角?β影响Xm与Zm,分别为±Zpδ?β和-Xpδ?β;航向角?γ影响Xm与Ym,分别为±Ypδ?γ和±Xpδ?γ,正负号取决于飞行方向。
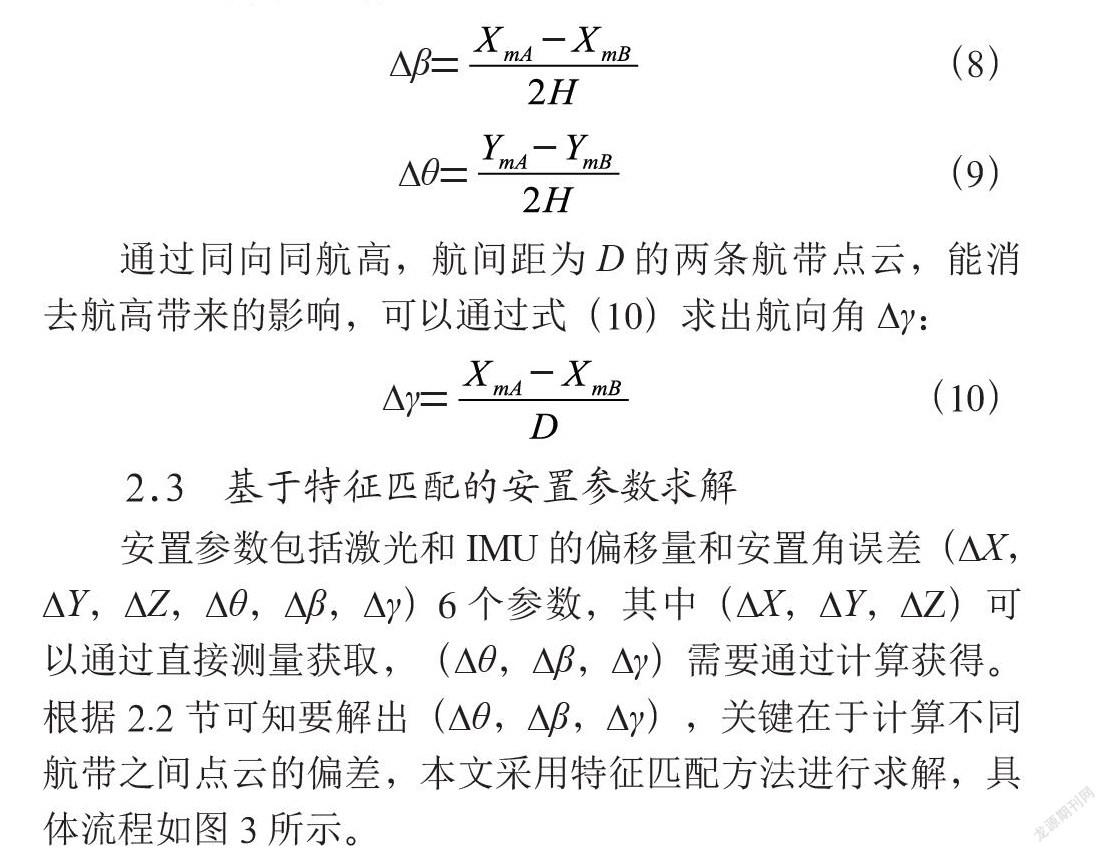
通过获取往返飞行且航高相同的两条航带,假如航高为H,能消去航间距带来的影响,可以求出翻滚角?β和俯仰角?θ,如式(8)和(9)所示,其中Xm和Ym分别为点云在X和Y方向的坐标:
2.3 基于特征匹配的安置参数求解
安置参数包括激光和IMU的偏移量和安置角误差(?X,?Y,?Z,?θ,?β,?γ)6个参数,其中(?X,?Y,?Z)可以通过直接测量获取,(?θ,?β,?γ)需要通过计算获得。根据2.2节可知要解出(?θ,?β,?γ),关键在于计算不同航带之间点云的偏差,本文采用特征匹配方法进行求解,具体流程如图3所示。
首先进行获取原始点云数据和轨迹数据进行点云融合,形成带地理坐标的点云数据;其次,通过点云数据的反射强度来提取特征,为了避免提取高强度板以外的高强度点,设置一个预定义的区域范围来提取高强度点,再采用基于距离的区域生长算法对高强度板进行分组;第三,通过的RANSAC算法对每个特征平面进行平面拟合形成特征面,并输出特征面点云;第四,对特征面点云进行匹配,本文采用基于PCL库ICP-PATCH的方法进行计算,获得两个航带之间的点云偏差;最后,根据已知的杠臂值、航高、航间距利用式(8)~(10)求出三个安置角误差。
3 实验数据与结果分析
3.1 系统概述
图4为实验采用多线机载雷达系统,激光头采用Velodyne VLP16,惯导采用Applanix APX-15,控制板为基于Freescale imx6嵌入式系统,进行设备控制和数据记录。GNSS与IMU数据采用Applanix公司的POSPac软件进行处理并输出航线轨迹,点云融合、特征匹配与安置参数求解等功能采用自研开发点云处理软件Data-PreProcess,软件基于C++实现,软件界面如图5所示。
3.2 实验步骤
首先进行航线规划和数据采集,根据第二节的原理分析,设计航高50 m高度的来回和同向航线,航间距为50 m,飞行速度为5 m/s。选取的标定场景应具备明显的线面特征,如低矮的房子和人字顶房屋等,采用六旋翼无人机搭载雷达系统按照规划航线进行数据采集。其次,数据采集完成后导出GNSS/IMU和点云原始数据,GNSS/IMU数据通过Pospac软件生成出航线轨迹SBET数据,将原始点云数据和SBET导入Data-PreProcess融合生成各条航线点云,如图6所示。第三,对不同航带的点云数据进行特征提取获得特征点云,如图7所示。最后,将航高和航间距输入Data-PreProcess软件,软件自动计算出校正参数值。
3.3 精度验证
为了验证计算校正参数是否有效正确,选取建筑物场景进行验证,并对房角点的位置做准确测量作为验证真值。采用机载LiDAR系统进行来回航带的采集,融合点云对校正前和校正后进行对比,校正前来回点云错位非常明显,校正后点云完全重叠一起,证明校正参数是有效的,如图8和图9所示。进一步对点云进行精度验证,获取点云建筑对应房角点的位置与测量的值进行对比,实测误差在10 cm以内,精度达到预期证明校正是正确的,如表1与表2所示。
4 结 论
本文针对多线机载激光雷达提出一种安置角检校方法,该方法通过来回和同向航带获取点云,并从点云中提取出特征形成特征面,通过特征面计算不同航带点云之间的偏差,并根据航高和航间距计算安置角检校参数。通过实验证明,计算出的安置角检校参数正确有效,校正后的点云精度能达到10 cm以内。
参考文献:
[1] 马振廷.基于机载激光雷达系统的飞行动态定标技术研究 [D].成都:西南交通大学,2017.
[2] 王国锋.许振辉.多源激光雷达数据集成技术及其应用 [M].北京:测绘出版社,2012.
[3] 李伟,唐伶俐,吴昊昊,等.轻小型无人机载激光雷达系统研制及电力巡线应用 [J].遥感技术与应用,2019,34(2):269-274.
[4] 李冰,林宇龙,黄珣,等.基于激光雷达技术的无人机电网基建管控系统 [J].现代电子技术,2018,41(2):99-101+ 106.
[5] 吴德智.曾璧环.叶清泉.基于无人机载激光雷达的电力线自动提取技术 [J].中国科技投资,2014(A10):1-4.
[6] 吴擢城.无人机载激光雷达在林业资源调查的应用 [J].农家科技,2019(6):277.
[7] NIETHAMMER U,JAMES M R,ROTHMUND S,et al. UAV-based remote sensing of the Super-Sauze landslide:Evaluation and results [J].Engineering Geology,2012(128):2–11.
[8] WEISS U,BIBER P. Plant detection and mapping for agricultural robots using a 3D LIDAR sensor [J].Robotics and Autonomous Systems,2011,59(5):265–273.
[9] AYMAN H,KI IN B,PAULA K A,et al. Error Budget of Lidar Systems and Quality Control of the Derived Data [J].Photogrammetric Engineering & Remote Sensing,2009(9):1093-1108.
[10] SKALOUD J,LICHTIRI D. Rigorous approach to bore-sight self-calibration in airborne laser scanning [J].ISPRS Journal of Photogrammetry & Remote Sensing,2006,61(1),47–59.
[11] SCOUARNECB R L,TOUZ? T,LACAMBREB J B,et al. A NEW RELIABLE BORESIGHT CALIBRATION METHOD FOR MOBILE LASER SCANNING APPLICATIONS [J].EUROPEAN CALIBRATION AND ORIENTATION WORKSHOP( EUROCOW 2014)International Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences,2014:67-72.
[12] 張小红.机载激光雷达测量技术理论与方法 [M].武汉:武汉大学出版社,2007.
[13] 章大勇,吴文启,吴美平.机载激光雷达系统标定方法 [J].光学精密工程,2009,17(11):2806-2813.
作者简介:钟振(1981.08—),男,汉族,广东惠来人,中级,硕士,研究方向:多传感器融合、点云处理。