一类无线广义网络控制系统的迭代学习控制*
2016-06-03李祖松何富贵周先存魏利胜
李祖松, 何富贵, 周先存, 魏利胜
(1.皖西学院 信息工程学院,安徽 六安 237012; 2.安徽工程大学 电气工程学院,安徽 芜湖 241000)
一类无线广义网络控制系统的迭代学习控制*
李祖松1, 何富贵1, 周先存1, 魏利胜2
(1.皖西学院 信息工程学院,安徽 六安 237012; 2.安徽工程大学 电气工程学院,安徽 芜湖 241000)
摘要:广义系统广泛存在于工业控制系统模型;针对传感器至控制器通过无线网络连接的一类广义网络控制系统,采取迭代学习控制策略,通过卡尔曼滤波减少无线信道噪声对系统控制性能的影响;理论上,通过λ范数给出了系统在给定的学习率下的收敛条件;通过实验仿真验证迭代学习策略中加入卡尔曼滤波的有效性和优越性。
关键词:无线网络控制系统;广义系统;卡尔曼滤波;迭代学习控制
随着无线通信技术的快速发展和工业自动化的日渐成熟[1],无线网络控制系统(Wireless Networked Control System,WNCS)应运而生并成为研究热点之一,在WNCS中通过无线网络将传感器、执行器和控制器连接成闭环回路,降低了系统的布线复杂度[2],实现了无线的远程控制。但是,无线网络的引入,无线信道噪声已被证实会导致控制性能的下降[3],因此如何降低无线信道噪声的干扰具有重要的意义。
迭代学习控制(Iterative Learning Control,ILC)能利用先前的控制信息调整控制输入,使系统能短时间内产生期望输出[4]。自ILC提出以来,针对算法的研究吸引了很多学者的注意并运用在网络控制系统中,赵众等将迭代学习控制运用在存在丢包的网络控制系统中,给出了系统的收敛性条件[5],Zhou等人研究了存在噪声的无线传输系统的迭代学习控制,分析了系统的控制性能[6-7],Huang等人通过仿真验证了迭代学习控制运用在无线传输系统的可行性[8]。
以上ILC研究内容多针对被控对象为正常系统,但针对广义网络控制系统的研究则相对较少。因此,此处在前人研究的基础上,详细探讨了一类无线广义网络控制系统的迭代学习控制问题,通过卡尔曼滤波降低无线信道噪声的影响,给出了系统的收敛条件,并通过仿真验证所提方法的有效性和优越性。
1问题描述
1.1被控对象模型
为了问题分析的简便而又不失一般性,仅考虑无线网络存在于传感器与控制器之间,且信道存在噪声wk(t)。
考虑如下形式的线性离散广义系统:
Exk(t+1)=Axk(t)+Buk(t)
(1)
其中E∈Rn×n是奇异矩阵,t∈[0,T]。
设E∈Cn×nind(E)=v,若n×n矩阵X满足:EvXE=Ev,XEX=X,EX=XE,则称X为E的Drazin逆[9]。
假设1:矩阵EED和矩阵A,B可交换[10]。
假设2:存在矩阵H,使得C=HEv。
对式(1)左乘E的Drazin逆ED,由于EDE和A是可交换的矩阵[10],又有C=HEv=HEv+1ED=CEED。
公式(1)转化为
(2)
yk(t)=CEEDxk(t)

(3)
1.2控制学习率
采用经典的迭代学习控制算法如下:
(4)
其中Γ(t)为学习增益,ek(t)=yd(t)-yk(t)为第k次迭代输出误差。

(5)

2收敛性分析

(6)
则有
(7)

在式(5)的学习率下,有式
(8)

将式(6)(7)代入式(8),得
(9)
对式(9)两端同时取范数,则
(10)

根据式(7)有
(11)
则有
(12)
有式(3)可得
(13)

(14)
将式(12)(14)代入(10)中,得
(15)
其中
ρ<1,当选取足够大的λ时,有ρ-<1。
又由式(15)可知
可得

3仿真分析
考虑如下系统模型
期望轨迹yd(t)=3sin(t)[11],初始时刻xk(0)=xd(0)=0,wk(t)为方差为0.005的高斯白噪声。采用式(6)所示的迭代学习控制率,Γ(t)=0.35,为给出比较,采用卡尔曼滤波和未采用卡尔曼滤波两种情况下系统误差均方根曲线分别如图1(a)和图1(b)所示。
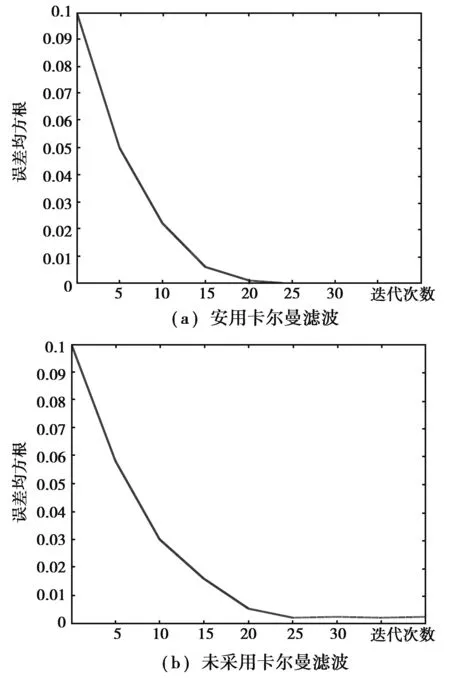
图1 系统误差均方根曲线Fig.1 System RMS error curve
从图1(a)看出,所提方法能够很好跟踪期望轨迹,在迭代21次完成了目标的跟踪,相比较与图1(b),卡尔曼滤波能很好的减小噪声对控制性能的影响,误差均方根明显得到控制。
4结束语
信道噪声会对无线网络控制系统的性能造成一定的影响,在一定的假设条件下,针对被控对象为广义系统的一类WNCS,结合卡尔曼滤波,采用迭代学习控制方法,得到了系统的收敛性条件,并通过仿真验证所提方法的可行性和有效性。
参考文献(References):
[1] 陈惠英,李祖欣.无线网络控制系统研究现状及方向[J].工矿自动化,2013,39(1):59-62
CHEN H Y,LI Z X.Research Status and Direction of Wireless Networked Control System[J].Industry and Mine Automation,2013,39(1):59-62
[2] 廖勇,代学武,周昕.基于特征值优化的无线网络控制系统故障检测滤波器设计[J].电子学报,2015,43(6):1236-1240
LIAO Y,DAI X W,ZHOU X.A Fault Detection Fiter Design with Eigenstructure Optimization in Wireless Networked Control Systems[J].Acta Electronica Sinica,2015,43(6):1236-1240
[3] 黄立勋,方勇.信道噪声对无线远程迭代学习控制系统的影响[J].信号处理,2012,28(11):1627-1633
HUANG L X,FANG Y.Influence of Channel Noises on Wireless Remote Iterative Learning Control Systems[J].Singal Processing,2012,28(11):1627-1633
[4] 阮小娥,朴光贤,卞增男.迭代学习控制技术回顾与长期学习控制展望[J].控制理论与应用,2012,29(8):965-973
RUAN X E,PARK K H,BIEN Z L.Retrospective Review of Some Iterative Learning Control Techniques with a Comment on Prospective Long-term Learning[J].Control Theory & Applications,2012,29(8):965-973
[5] 赵众,高颖,刘志立.网络控制系统中一种新形式的开闭环迭代学习控制[J].控制理论与应用,2013,30(10):1335-1341
ZHAO Z,GAO Y,LIU Z L.Novel Open-Closed-Loop Iterative Learning Control in Networked Control Systems[J].Control Theory & Applications,2013,30(10):1335-1341
[6] ZHOU W J,FEI M R,WANG H K.Remote Iterative Learning Control System with Duplex Kalman Filtering[G]∥Asia Simulation Conference.Shanghai: China,2012:82-91
[7] ZHOU W J,FEI M R,ZHOU X B.A Mehod of Kalman Filtering for Remote Learning Control System with Wireless Channel Noise[G]∥Fourth International Workshop on Advanced Computational Intelligence.Wuhan:China,2011:365-369
[8] HUANG L X,FANG Y.Effects Elimination of Channel Noises for Wireless Remote ILC Systems Based on Kalman Filter[G]∥2012 International Conference on System Science and Engineering.Dalian:China,2012:395-398
[9] 郭文斌,魏木生.奇异值分解及其在广义逆理论中的应用[M].北京:科学出版社,2008
GUO W B,WEI M S.Application of Singular Value Dcom-position in g-Inverses[M].Beijing:Science Press,2008
[10] 田森平,毛琳琳.带控制时滞广义系统的PID型迭代学习算法[J].控制工程,2012,19(1):65-68
TIAN S P,MAO L L.PID-Type Iterative Learning Control for Singular Systems with Control delay[J].Control Engineering of China,2012,19(1):65-68
[11] 李祖松,陈其工,魏利胜.一类广义系统的开闭环PID型迭代学习控制[J].重庆工商大学学报(自然科学版),2012,29(11):1-5
LI Z S,CHEN Q G,WEI L S.Open-closed-loop PID-type Iterative Learning Control for a Class of Generalized Systems[J].Journal of Chongqing Technology and Business University(Natrual Science Edition),2013,29(11):1-5
责任编辑:田静
Iterative Learning Control for a Class ofWireless Generalized Networked Control System
LI Zu-song1, HE Fu-gui1, ZHOU Xian-cun1, WEI Li-sheng2
(1.Department of Information Engineering, West Anhui University, Anhui Lu’an 237012, China;2.Department of Electrical Engineering, Anhui Polytechnic University, Anhui Wuhu 241000, China)
Abstract:Generalized system exists in many industrial control system . The strategy of the iterative learning control for a class of generalized network control system with the sensor to the controller connected via a wireless network is implemented in this paper. Kalman filter is used to reduce the effect on the performance of the system by wireless channel noise. According to the λ norm, the convergence condition of the system with the given study rate is derived. Simulation example shows the effectiveness and superiority of the proposed algorithm.
Key words:wireless networked control system; generalized system; Kalman filtering; iterative learning control
中图分类号:TP273
文献标志码:A
文章编号:1672-058X(2016)03-0034-04
作者简介:李祖松(1988-),男,安徽霍邱人,助教,硕士研究生,从事自动检测与控制系统研究.
*基金项目:国家自然科学基金(61303209;61572366);皖西学院校级项目(WXZQ1418).
收稿日期:2015-09-08;修回日期:2015-12-10.
doi:10.16055/j.issn.1672-058X.2016.0003.007