气动技术在下肢联动康复训练仪上的应用
2016-05-31储杰邹任玲上海理工大学医疗器械与食品学院上海200093
储杰,邹任玲上海理工大学医疗器械与食品学院,上海 200093
气动技术在下肢联动康复训练仪上的应用
储杰,邹任玲
上海理工大学医疗器械与食品学院,上海200093
[摘要]目的为消除下肢康复训练仪因电动驱动机构引起的运动机械感,该研究将气动技术应用于下肢康复训练仪,使患者的康复训练更为舒适,并提供主被动相结合的康复训练模式,增强偏瘫患者的主动康复意识。方法通过机械结构、气动驱动力、联动运动模式控制三方面的研究,来完成气动技术应用于下肢康复训练仪的整体设计,并通过微型气动驱动实验来验证设计的可行性。结果微型实验证明气动驱动力可代替电动驱动力完成康复训练所需的驱动力,得出驱动负载率β约为67.3%。结论在气动技术的应用下,康复运动由匀速运动转为变速率运动,运动更具柔顺性。
[关键词]康复仪器;气动驱动;关联处理;主观训练
邹任玲(1971.9-),女,湖南平江人,博士,副教授,主要研究方向:康复医疗仪器研制、光学生物传感器研究、医疗器械检测。
据统计,目前我国每年新发脑卒中的人数超过200万,发病率位居世界第一,而脑卒中是引起患者偏瘫的主要原因。临床研究表明,偏瘫患者在进行康复治疗后,对其促进肢体恢复,改善其生活质量具有重要的临床意义[1-2]。
近年来,下肢康复医疗仪器都到了大力发展,但应用于临床的康复训练仪主要采用电动驱动方式,以ContinuousPassiveMotion(下肢CPM康复仪)为例,该设备驱动结构部件多,机械结构故障率高,康复运动机械感强,康复运动舒适度还有待提升[3-4]。如今,气动技术被应用于多种医疗康复设备中[5],与电机驱动相比较,气动驱动在安全性、柔顺性、轻巧性等方面都有优势[6],将气动技术应用于下肢康复训练仪,以气动驱动替代电动驱动,来提升下肢康复训练仪的工作效率,同时医疗场所普遍具有压缩空气、氧气等高压气源,能方便提供气动驱动所需的气源[7]。该研究研究设计一种运用气动技术的下肢联动康复装置,来简化机械结构和克服电动驱动带来的机械感强、机械故障率高的缺点。同时为偏瘫患者提供一种主被动相结合的联动康复运动模式,增强肢体运动功能及协调性[8-9],为下肢康复训练提供一种新思路。
1 方法
该研究中,基于偏瘫患者的联动训练是借助健侧下肢向患侧下肢传递运动信息的过程,联动模式分为交替和同步两种,交替联动是在健侧下肢做膝关节弯曲与伸展的运动过程中,患侧下肢在健侧肢的带动下延迟做相应运动,交替实现康复训练,交替运动模拟的是人体踏步训练。同步联动是健侧膝关节在做弯曲伸展运动过程中,患侧膝关节同时做相同运动,完成同屈同伸的运动过程,同步运动模拟人体下蹲起立训练。设计目标:①要完成气动驱动对电动驱动的替换;②要形成双侧下肢的联动运动结构。在设计方法上:①从机械结构完成驱动元件的替换;②计算气动驱动力选用合适的气动元件;③完成联动运动模式控制实现主被动相结合的康复训练模式。
1.1机械结构设计
仪器整体机械结构设计分为三大部分(如图1):床体、下肢结构(分为左、右两侧下肢)、气动驱动结构。床体为基础结构,下肢结构为下肢运动区域,气缸驱动结构实现气传动过程中的下肢联动运动。整体结构长200 cm,宽70 cm,高80 cm。
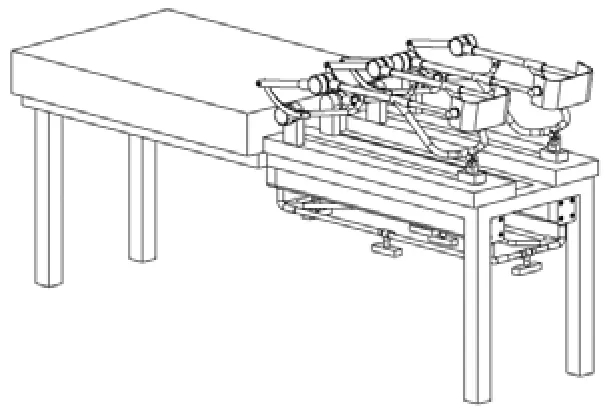
图1 整体机械结构
床体主要分为两大部分,上半身部分使用绵材质,供患者躺卧。下半身部分为钢结构构成,结构上方用于安装左右两侧下肢外骨骼结构,下方用于安装气缸结构。
下肢结构设计基于下肢CPM康复仪,将原有的电动驱动部件去除,仅保留机械外骨骼运动结构。驱动点仍处于中间槽内,做直线往复运动。根据人机运动学参数可知,下肢屈伸运动过程中关节运动以矢状面运动为主,设计中将踝关节、膝关节运动范围分别控制在-20~30°与0~140°范围之间[10],确保仪器在使用过程中的安全性。
气动结构主要以2根气缸元件为主,另有部分辅助配件。气缸的关键部件有缸体、活塞、气孔等(如图2)。活塞在缸体内移动,并与驱动点配合连接,将活塞平移运动与下肢结构运动进行关联,从而实现气缸运动带动下肢运动的目的。
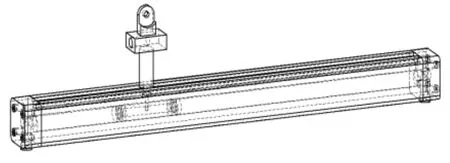
图2 无杆气缸连接示意图
气缸固定于床体下端,气缸活塞与驱动点关联后,使用辅助配件将双侧气缸的气孔进行相互连接,使气体成为传动介质,关联左、右下肢的运动。同时在每两个气孔连接管路上装有气阀,在气阀的控制下,使气孔之间形成不一样的通路模式,从而实现不同的联动运动模式。
1.2气动驱动力计算
在完成机械结构设计后,有效的气动驱动力是实现正常运动的关键所在。气动驱动力的计算主要是为了确定工作气压和缸径等参数,从而选用合适的气缸元件。在气缸中,气压与力的关系满足计算公式:P(压强)=F(力)/S(作用面积)。按照一般患者体重70 kg为例,假设单侧下肢在运动过程中需要承受35 kg的重量,约等于350 N的力。气缸理论推力计算如下:Ft=A·P
式中:Ft为气缸理论输出力(N);A为气缸腔内活塞面积(m2);p为气缸工作压力(Pa),工作压力是指气压在不断增加的过程中,当输出力小于驱动力时,气体做压缩运动,不产生驱动运动,在气体不断压缩的过程中,气压不断增高,直到输出力大与驱动力时,气缸才进行正常运动,此时的气压即为工作气压。
在气缸缸径的选择上,假设气缸工作压力为0.4 Mpa。缸径计算过程:m=35 kg;g=9.8 N/kg;P=0.4 mpa;Ft=mg=35×9.8=343 N

气缸直径大于33.15 mm,在气缸内气压大于0.4 mpa的情况下,即可负载下肢屈伸所需承受的力。
气缸是将气压能转换为机械能的气动执行元件,气缸在进行直线往复运动中具有其结构优势,能有效替代电动驱动做直线运动。又因无杆气缸没有活塞杆,所以气缸腔体活塞两端的面积相同,在不同方向运动过程中,所受到和输出的力相同,并且无杆气缸较其他气缸具有长运动行程的优势。固无杆气缸是最合适本设计的气动驱动元件。
1.3联动运动控制设计
联动运动过程,是将气体做为力的传动介质,实现力从健侧下肢向患侧下肢传递的过程。通过气阀控制,使气缸气孔之间形成不一样的连接状态,实现交替和同步两种联动运动模式。
如图3所示,在交替联动过程中,仅气路开关阀A1、A2打开,气缸A、B同侧端气孔相通,以气缸活塞为分界线,将内部气路分割为2个密闭空间,当气缸活塞向右侧运动时,气缸内气压、体积等参数为了达到平衡位置,气缸B的活塞向左侧运动,两侧气缸活塞做相对方向运动,形成交替运动的状态。在同步联动过程中,仅开关阀C1、C2打开,气孔间交叉相通,内部气路同样形成两个密闭空间,当气缸A的活塞向左侧运动时,气体流动方向发生了变化,从而气缸B的活塞同样向左侧运动,双侧气缸活塞做同向运动,形成同步运动状态。整个联动过程中,健侧下肢作为力的输出端,通过气缸将输出力转化为气压能,再将气压能转化为力,在患侧下肢端进行输出。在联动传动过程中,实现患者在主动与被动相结合的状态下,进行下肢联动康复训练。
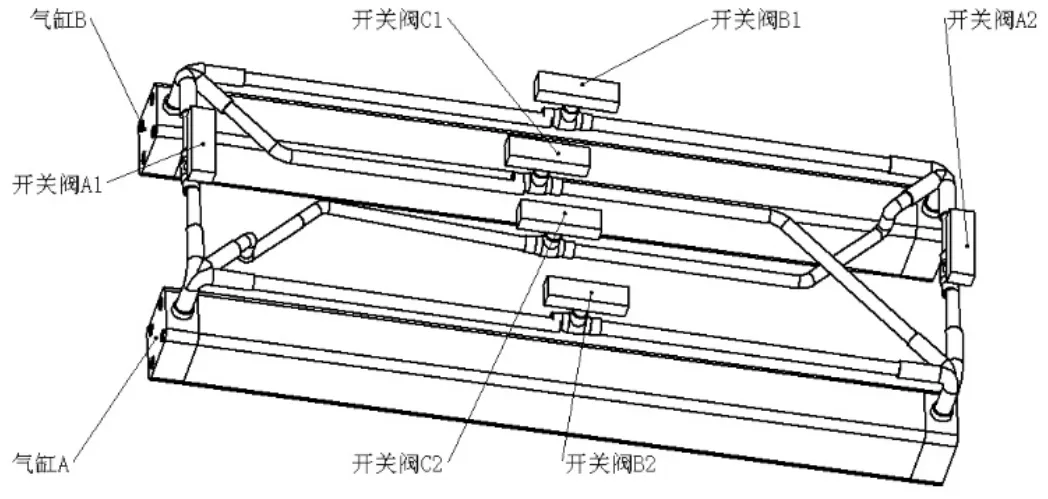
图3 气缸连接结构
2 结果
设计结果的验证还需由实验来证实,关键在于气动驱动力的验证。为保证气动驱动的有效应用,进行了气动联动微型实验。实验目的:①要模拟联动运动过程中力的传递;②要验证驱动力的有效输出。微型实验材料有:无杆气缸、开关阀、节流阀、气路三通、气管等。另有测量设备:力的测量设备弹簧测力计、气压的测量设备耐震压力表。实验方法:将两根气缸按照设计要求安装连接,将一侧气缸作为驱动端,另侧气缸作为接收端。在接收端连接有气压表(用于测量气缸内气压大小)、测力计(与气缸活塞相连测量输出力)。实验步骤:在驱动端对气缸加压,观察接收端活塞的运动过程,记录气压表和测力计的数据。同一气压值测量10次力的数据,求平均值作为实验数据。实验数据如表1。

表1 气缸驱动模拟实验数据
根据气缸负载率β公式:β=气缸的实际负载F/(气缸的理论输出力Ft)×100%计算平均值得出负载率β= 67.3%,有32.7%的力因外界因素被损耗。实验结果也有力证明了气缸能有效完成力的驱动,达到电动驱动的效果。
同时,在实验过程中,观察到接收端活塞的运动速度与驱动力的大小成反比,负载力越小运动速度越快,负载力越大运动速度越慢,成变速率运动过程,变速率的大小与驱动力大小成正比,运动是由快到慢的过程。
3 讨论与总结
基于气动技术的下肢联动康复训练仪在机械结构设计上,简化了下肢CPM康复仪的电动元器件(电机、马达、传动装置等),使用无杆气缸作为气动元件,在结构上更为简单,使用操作也更为简便。
气体具有可压缩性的特点,可以为患者提供柔顺、舒适的康复体验。在电动驱动下肢CPM康复仪中,为稳定运动速度,仪器设计中使用反馈电路控制电机转速[11],所以无论患者感受度如何,运动阻力增加或减小,仪器在整个康复过程中始终保持稳定的速度,这也是机械感强的原因所在。但在气动驱动过程中,假设气压为0.2 mpa,输出力等于251.2 N,若正常康复运动所需的驱动力为250 N,此时仪器处于正常运动状态,在实际康复训练过程中患者因不适感或其他因素影响时均会使驱动负载发生变化,当负载大于输出力时,康复运动变会停止,在气体进一步压缩、气压逐渐升高的过程中,输出力随之增加,输出力再次大于负载后,康复运动将从静止向运动状态做缓慢变换,其过程是柔顺的线性变化,是微型实验中也印证了此运动过程,所以气动技术能将患者的运动阻力实时反应在整个康复训练过程中,消除了电动驱动恒定移速下的机械感。
同时,仪器通过气缸形成的联动结构为脑卒中偏瘫患者提供了更多的康复训练模式,患者可以做单侧下肢膝关节屈伸运动,也可以做双侧下肢同步、交替屈伸运动。联动运动模式中主动与被动运动相结合,驱动力来自健侧下肢的主动运动,患侧下肢在力的作用下完成被动运动。这种主被动相结合的康复训练模式,能强化患者主动康复的意愿,提高康复治疗效果[12-13]。
[参考文献]
[1]谢青,宋小慧.脑卒中康复治疗技术发展史[J].中国现代神经疾病杂志,2015(3):177-181.
[2]Gum A,Snyder CR,Duncan PW. Hopeful thinking,participation,and depressive symptoms three months after stroke[J]. Psychology and Health,2006,21(3):319-334.
[3]傅道元,礼国庆.康复医学设备现状与发展方向浅析[J].集成技术,2013(4):74-78.
[4]叶晓勤,谢雁鸣.传统中医康复设备的应用现状与研究展望[J].辽宁中医杂志,2010(8):1459-1460.
[5]Nishioka Y,Suzumori K,Kanda T,et al. Multiplex pneumaticcontrol method for multi-drive system[J]. Sensors and ActuatorsA:Physical,2010,164(1-2):88-94.
[6]Qiu ZC,Wang B,Zhang XM,et al. Direct adaptive fuzzy controlof a translating piezoelectric flexible manipulator drivenby a pneumatic rodless cylinder[J].Mechanical Systems andSignal Processing,2013,36(2):290-316.
[7]徐奚娇,徐秀林.气动技术在脑卒中康复中的应用[J].中国康复理论与实践,2014(1):46-48.
[8]王燕.早期康复护理对脑出血偏瘫患者肢体运动功能的影响[J].大家健康:学术版,2015(15):266-267.
[9]刘宝国,薛丹丹,张国芳,等.四肢联动训练器在偏瘫患者康复治疗中的应用[J].实用中西医结合临床,2014,14(5):9-10.
[10]谈正卿,顾启秀.中医工程学概论[M].上海:上海中医学院出版社,1990:49-53.
[11]朱瑞银,施朝晖,陈中,等.下肢CPM训练器的研制[J].医疗卫生装备,2002(2):17-19.
[12]马雪,杨坚,乔蕾,等.个体化主动康复对脑卒中偏瘫患者下肢运动功能的影响[J].中国实用医药,2010,5(15):4-5.
[13]郝双阶,肖文武.四肢联动对脑卒中偏瘫患者恢复期步行能力的影响[J].湖北民族学院学报:医学版,2014,31(1):28-30.
Application of Pneumatic Technology in Lower Limb Rehabilitation Training Instrument
CHU Jie,ZOU Ren-ling
College of Medical Devices and Food Science,University of Shanghai for Science and Technology,Shanghai,200093 China
[Abstract]Objective In order to eliminate the sense of motion caused by the lower limb rehabilitation training instrumenusingelectric drive,in this paper,we research and design an application of pneumatic drive for lower limb rehabilitation training instrument,to make the patient's rehabilitation training more comfortable,and providerehabilitation modalitycombination of active and passive to enhance the consciousness of active rehabilitation in patients with hemiplegia. Methods Through the three aspects design of mechanical structure,pneumatic driving force,linkage motion mode control,to make sure that pneumatic technology is applied to the rehabilitation training instrument of the lower limb,and through micro pneumatic driving experimentverify the feasibility of the design. Results Experimental resultsshowpneumatic driving force can be used instead of electric driving force,and the driving load rate βis about 67.3%. Conclusion The uniform speed rehabilitation exerciseis transformed intovariable speed rehabilitation exercise,make feeling ofthe rehabilitation exercise become more comfortable.
[Key words]Rehabilitation equipment;Pneumatic drives;Associative processing;Subjective testing
收稿日期:(2015-10-09)
[作者简介]储杰(1986.9-),男,上海奉贤人,在职研究生,助理工程师,主要从事医疗设备的维修与管理。
DOI:10.16659/j.cnki.1672-5654.2016.01.054
[中图分类号]R318
[文献标识码]A
[文章编号]1672-5654(2016)01(a)-0054-04
