紧急避险车道驶出角度及引道长度设置
2016-05-28宋灿灿郭忠印
宋灿灿, 郭忠印, 蔺 琳
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804; 2.山西省高速公路管理局,山西 太原 030006)
紧急避险车道驶出角度及引道长度设置
宋灿灿1, 郭忠印1, 蔺琳2
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804; 2.山西省高速公路管理局,山西 太原 030006)
摘要:通过UCWin Road Ver.9驾驶模拟仿真平台测试5名驾驶员144次驶入紧急避险车道的运动参数.依据方向盘转速提取调整段长度、调整时间与最小转向半径指标,分析3个指标与驶入速度、驶出角度的相关性,并基于二阶聚类模型提出紧急避险车道驶出角度与引道长度设置范围.研究结果表明:紧急避险车道驶出角宜在5°以内,最大宜在12.5°以内,且必须在引道设置超高.引道设计长度宜采取调整时间作为控制指标,驶出角在5°以内时引道长度为6 s设计行程,驶出角在5°~12.5°时引道长度为9 s设计行程.
关键词:紧急避险车道; 驾驶模拟; 驶出角度; 引道长度
实践证明设置紧急避险车道是目前解决高速公路交通安全问题最有效的工程措施之一[1].我国自1998年设置第一条避险车道至今已投入使用的避险车道达400多条[2].尽管通过建设大量紧急避险车道积累了丰富的工程经验,但紧急避险车道驶出角度与引道设置依然存在问题.对我国现役92条紧急避险车道驶出角度统计发现,驶出角范围为0°~45°,驶出角在5°以内占14.6%,10°以内占48.7%,与研究提出的5°~10°的控制标准相差大[3-7].
对紧急避险车道长度与驶出角度的相关分析发现二者呈负相关关系.驶出角度的增大使失控车辆成功驶入紧急避险车道的难度与所需引道长度增大.紧急避险车道设置的现实规律与失控货车行驶的客观需求相悖,进一步说明对驶出角度与引道长度研究的必要性与紧迫性.
国内外学者对驶出角度与引道长度孤立研究,得出结论驶出角度宜控制于5°或10°内.美国研究要求引道长度大于305 m[8-11],张翱东[12]和孙传夏[13]提出引道长度至少达到9 s与4 s设计行程.将驶出角度与引道长度孤立研究易造成驶出角度小而引道过长与驶出角度大而引道过短的矛盾.本文运用驾驶模拟仿真技术,针对主线为直线的紧急避险车道,将驶出角度与引道长度作为相互影响的有机体,研究不同驶入速度下紧急避险车道最大驶出角与最小引道长度设计.
1试验方案与数据分析方法
1.1试验道路
紧急避险车道设置于长为4 km的仿真试验路3.5 km处.除2 km处设置半径2 000 m,长500 m的平曲线外主线段为直线.纵坡-2%.采用24.5 m标准横断面,(2.5 m(硬路肩)+3.75 m(行车道)×2+0.75 m(路缘带)+1.5 m(中央分隔带))×2,并设置2%的双向横坡.
紧急避险车道平面线形如图1所示,采用13.2 m横断面,0.5 m(土路肩)+9.0 m(制动床)+3.2 m(服务车道)+0.5 m(土路肩).引道段为平坡,制动床纵坡8%,竖曲线半径600 m.
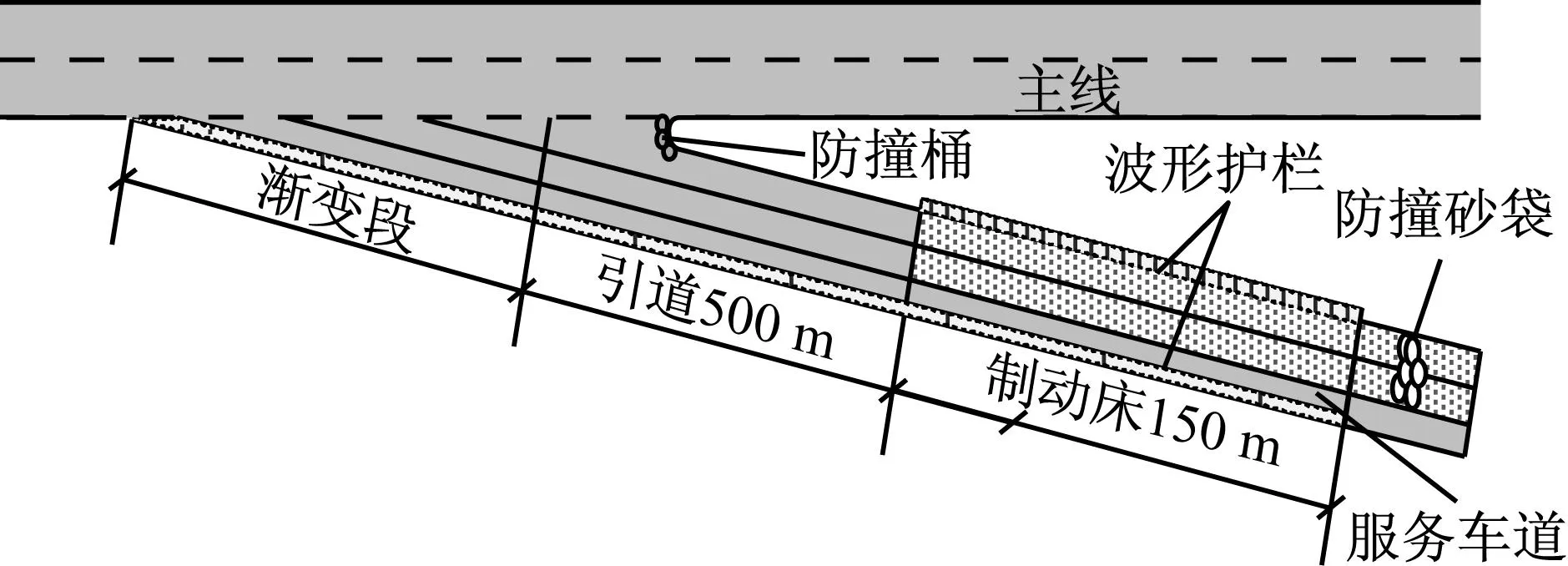
图1 避险车道试验平面模型
渐变段根据驶出角度设置,满足转向要求的渐变段长度计算公式[14]如下:
(1)
式中:L为渐变段长度,m;V为车辆行驶速度,km·h-1;B为横断面宽度,取制动床宽度9 m;Vh为车辆横移速度,取1.2 m·s-1;θ为驶出角度.根据试验最大速度120 km·h-1进行计算,结果见表1.
表1不同驶出角度下避险车道渐变段长度
Tab.1Transition lengths of truck escape ramp at different departure angles
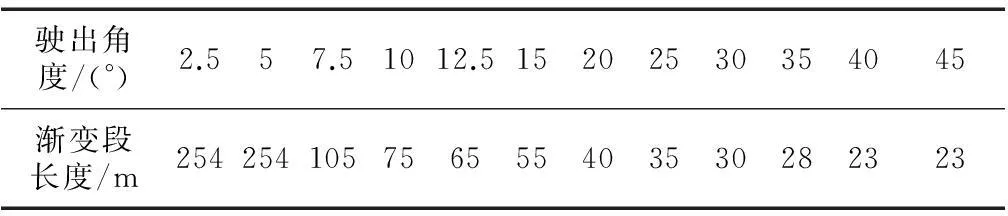
驶出角度/(°)2.557.51012.515202530354045渐变段长度/m254254105756555403530282323
1.2被测驾驶员
为降低驾驶员驾龄与驾驶经验对试验的影响,选取5名没有驶入紧急避险车道且无驾驶模拟器经验的男性熟练货车驾驶员进行重复试验,被测驾驶员信息见表2.

表2 被测驾驶员信息
1.3试验方法
试验采用提供地形、道路构造、模型、交通流及自然环境的模拟的UCWin Road驾驶模拟软件,并利用专用程序采集驾驶车辆及周边交通流数据[15-16].
被测驾驶员驾驶模拟器自带场景累计20 km后选用6轴半挂车于路段起点启动车辆,并加速至90,100,110和120 km·h-1后保持匀速驶入紧急避险车道,车辆行驶至制动床或车辆方位调整至可顺利驶入制动床时结束.试验场景见图2.


图2驾驶模拟试验
Fig.2Driving simulation
1.4数据分析方法
可用于方向调整起终点位置判定的参数包括横摆角、横摆角速度、X加速度、方向盘转角和方向盘转速.选用突变性最大的方向盘转速,方向盘转速达相邻转速10倍及以上时判定为方向调整的起终点.失控货车驶入紧急避险车道属换车道行为,车辆从行车道转入目标车道产生调整段长度、调整时间和最小转向半径.
为分析驶入速度与驶出角度、调整段长度、调整段时间、最小转向半径的关系,剔除自驶出圆曲线至渐变段起点止车速变异系数大于0.02的29组数据.因在役紧急避险车道引道长度短且两次方向调整仅3次,因此剔除两次方向调整试验组.
本文定义了调整段长度与调整段时间概念.调整段长度为车辆驶入渐变段起至制动床或车辆方位调整至可驶入制动床时的长度.调整段时间指驾驶员驶经调整段所用的时间.
2调整段长度分析
2.1调整段长度与驶入速度相关性分析
不同驶出角度下驶入速度与方向调整时间的相关关系见表3.驶入速度与调整段长度呈正相关关系.驶出角度为2.5°与5°时的相关系数大于0.8,二者高度线性相关.驶出角度为7.5°~40°时的相关系数介于0.5~0.8,观测数据的随机误差增大.由于数据由相同观察员根据同一标准获取,数据的观察误差与偶然误差相同.因此随机误差增大是由驾驶员心理负荷这一容易被忽视的因素导致的.

表3 驶入速度与方向调整段长度的回归分析
2.2调整段长度分布特征
不同驶出角度与驶入速度条件下车辆转向所需调整段长度见表4.
表4不同驶出角度与驶入速度的调整段长度分布
Tab.4Adjustment length at different departure angles and operating speeds
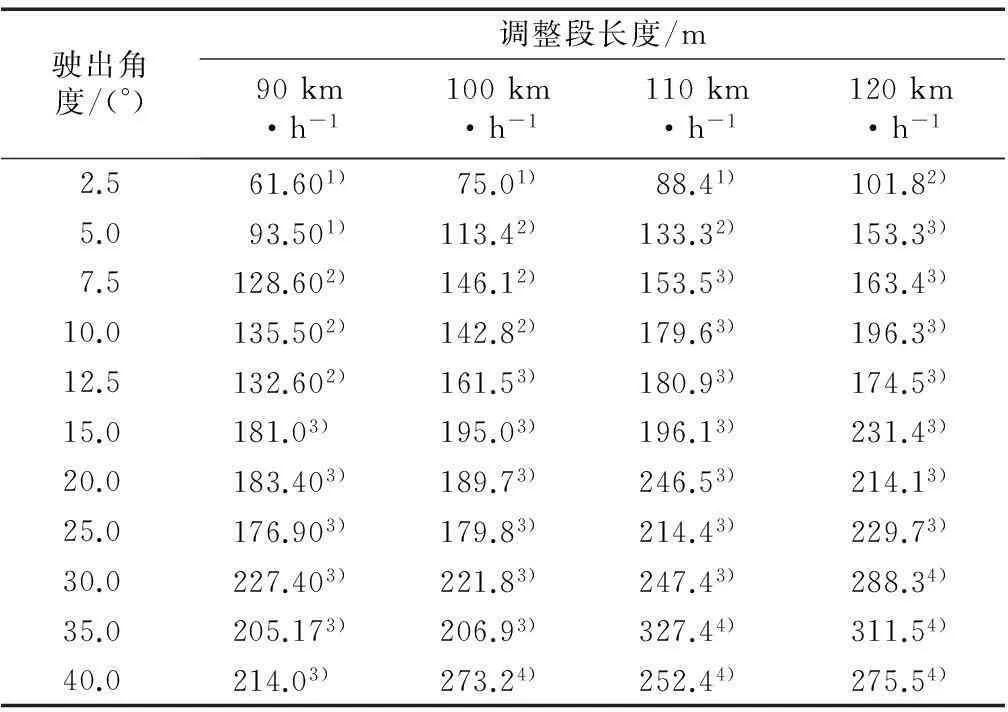
驶出角度/(°)调整段长度/m90km·h-1100km·h-1110km·h-1120km·h-12.561.601)75.01)88.41)101.82)5.093.501)113.42)133.32)153.33)7.5128.602)146.12)153.53)163.43)10.0135.502)142.82)179.63)196.33)12.5132.602)161.53)180.93)174.53)15.0181.03)195.03)196.13)231.43)20.0183.403)189.73)246.53)214.13)25.0176.903)179.83)214.43)229.73)30.0227.403)221.83)247.43)288.34)35.0205.173)206.93)327.44)311.54)40.0214.03)273.24)252.44)275.54)
注:1)为调整段长度小于等于100 m组别;2)为调整段长度大于100 m,小于等于150 m组别;3)为调整段长度大于150 m,小于等于250 m组别;4)为调整段长度大于250 m组别
60%的调整段长度介于150~250 m.以50 m为梯度划分调整段并标以不同数字,不同标识呈阶梯分布,说明应将驶出角度与驶入速度作为整体研究引道设置.
调整段长度的横向差值为50~60 m,表明同一驶出角度时车速对调整段长度变化量的影响相同.同一速度下调整段长度随驶出角度增大而增大,见图3,驶出角度与调整段长度呈显著线性相关关系.驶出角度小于5°时回归直线拟合效果差,表明驶出角度小时对调整段长度的影响小.回归直线斜率表明驶出角度对调整段长度的影响随驶入速度的增大而增大.
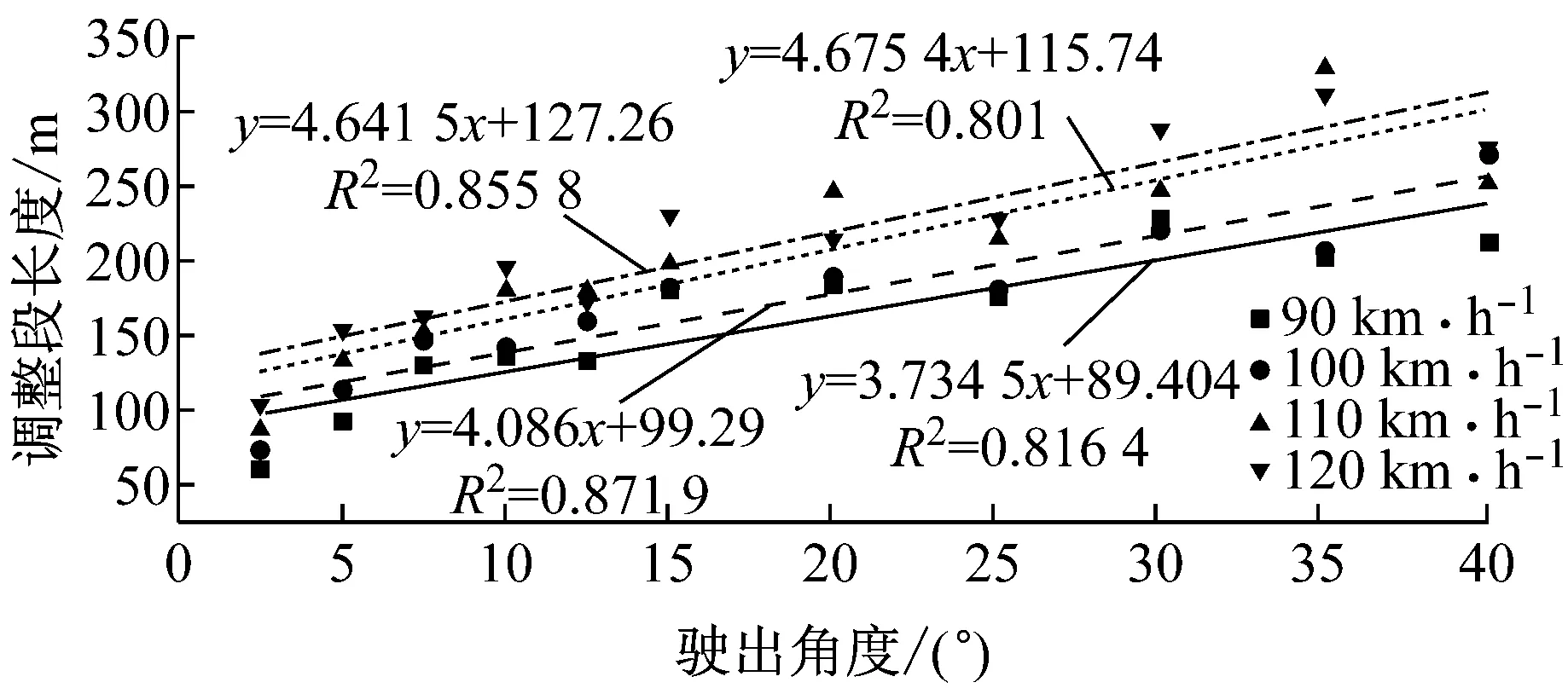
图3 不同速度下驶出角度与调整段长度相关关系分析
Fig.3Regression of departure angles and adjustment lengths at different operation speeds
3方向调整时间分析
3.1方向调整时间与驶入速度相关性分析
表5为不同驶出角度下驶入速度与调整时间回归分析表,驶出角度2.5°时相关系数大于0.8,方向调整时间对驶入速度敏感.驶出角度5°时相关系数介于0.5~0.8,调整时间对驶入速度较敏感.驶出角度大于5°相关系数小于0.5,二者相关性差.

表5 驶入速度与方向调整段时间回归分析
3.2方向调整时间分布特征
表6中调整时间以3 s为梯度划分并标以不同数字.仅6.8%的调整时间在3 s内,说明研究提出的3 s设计行程长度达不到安全要求,美国规定的9 s设计行程偏安全.驶出角度12.5°以内的调整时间小于6 s,驶出角度25°以内的调整时间小于9 s.
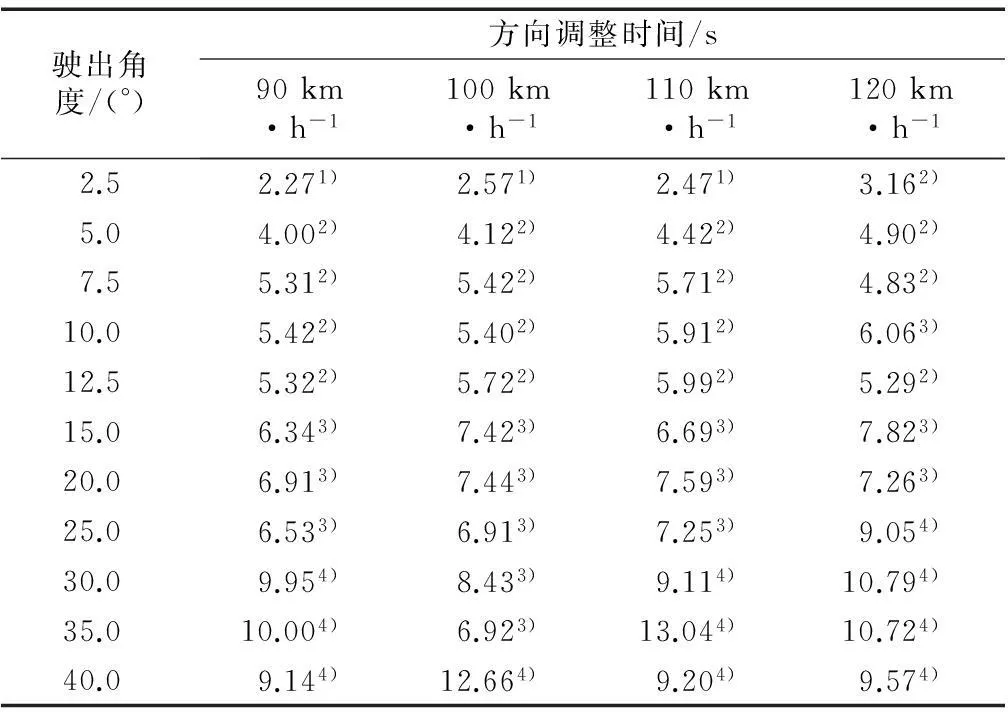
表6 不同驶出角度与驶入速度下调整时间分布
注:1)为方向调整时间小于等于3 s组别;2)为方向调整时间大于3 s小于等于6 s组别;3)为方向调整时间大于6 s小于等于9 s组别;4)为方向调整时间大于9 s组别
图4中驶出角度小于20°时同一流出角度、不同驶入速度的调整时间差值小于1 s.驶出角度大于20°时同一流出角度、不同驶入速度的调整时间差值增大,最大值达6.1 s,说明驶出角度过大时调整时间受驾驶员主观因素的影响增大.
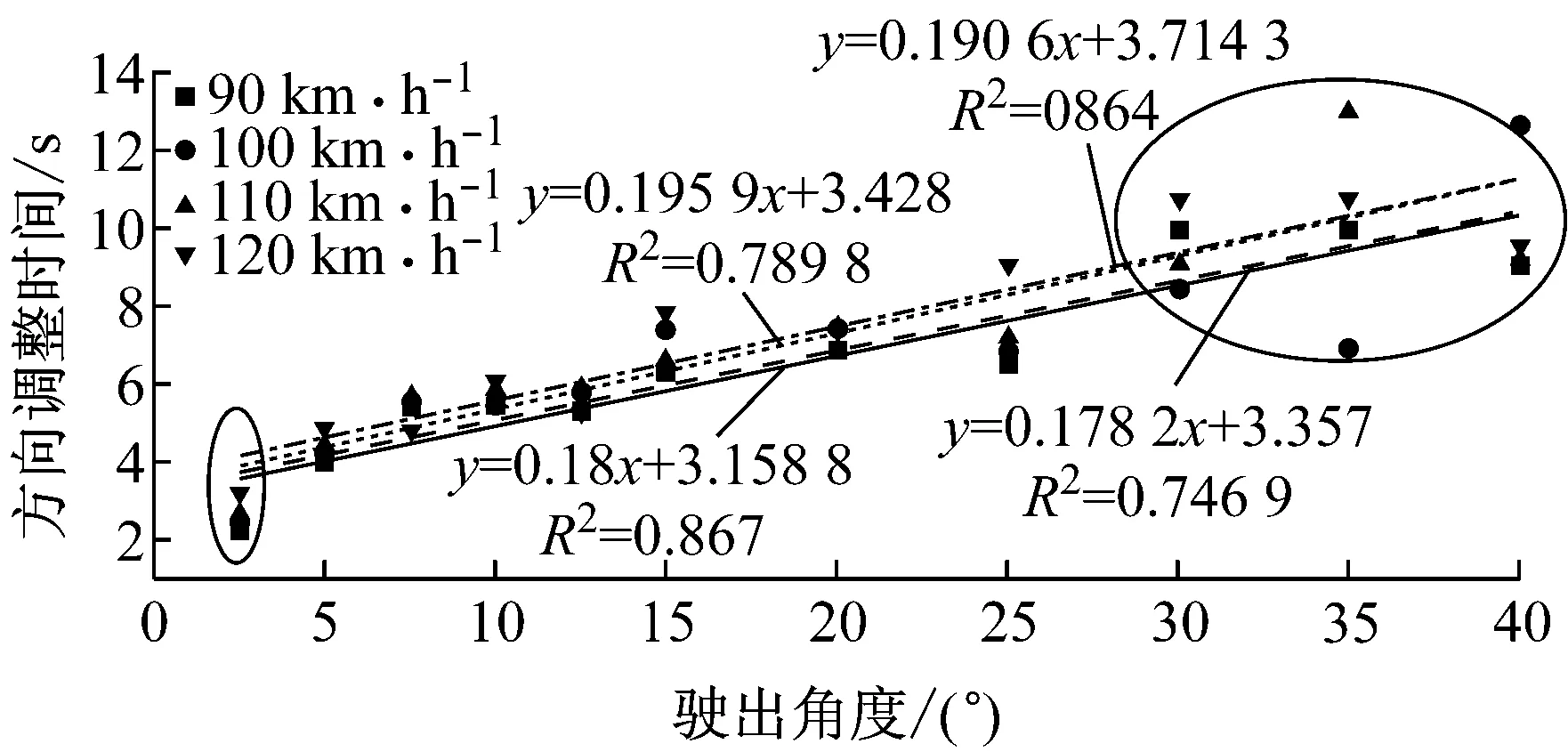
图4 不同速度下驶出角度与调整时间相关关系分析
Fig.4Regression of departure angles and adjustment time at different operation speeds
回归直线截距的差值在0.2 s内,证明驶入速度增大时调整时间略有增大.回归直线斜率的差值在0.05内,斜率表征驶出角度对调整时间的影响,驶出角度每增加1°,调整时间增加0.18~0.2 s.
4最小转向半径分析
4.1最小转向半径与驶入速度相关性分析
表7中驶出角度小于7.5°时,转向半径与驶入速度不存在相关性;驶出角度大于7.5°时,驶入速度与转向半径存在低度相关性.除驶出角度40°外,转向半径与驶入速度呈正相关关系.这表明驶出角度大于7.5°时,驾驶员选取大转向半径以避免发生侧翻或侧滑事故.

表7 驶入速度与最小转向半径回归分析
4.2行驶稳定性分析
最小转向半径影响车辆行驶的横向稳定性,车辆发生横向倾覆前先发生横向滑移,但紧急避险车道内常发生横向倾覆事故,因此本文对横向倾覆与横向滑移均进行研究.
表8中半径大于侧滑临界半径标识1),驶入速度100 km·h-1避免车辆侧滑的驶出角度为7.5°,驶入速度110 km·h-1避免车辆侧滑的驶出角度为5°,驶出角度5°~7.5°时引道必须设置不小于2%的超高.驶入速度120 km·h-1时避免侧滑的驶出角度为2.5°,驶出角度2.5°~5°时引道处必须设置不小于3%的超高.
表9中1),2),3)标识大于临界侧翻半径的最小转向半径,货车重心高度3.0 m,驶入速度90 km·h-1时,驶出角度控制在10°以内,当驶入速度增大时驶出角度须控制在7.5°以内.重心高度1.6 m,驶入速度90 km·h-1时,驶出角度控制在15°以内,当驶入速度增大时,驶出角度须控制在12.5°以内.
5二阶聚类分析
为进一步对紧急避险车道驶出角度的设置提供依据,采用二阶聚类分析对驶出角度进行分类[15].
表8不同驶出角度和驶入速度下最小转向半径
Tab.8Minimum turning radii at different departure angles and operating speeds
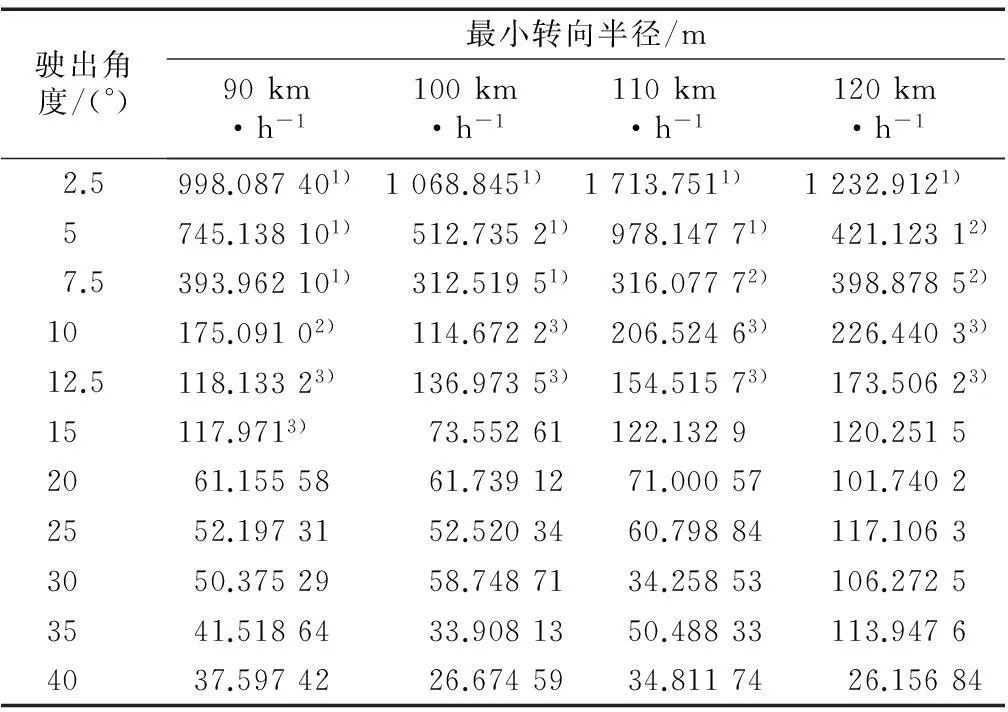
驶出角度/(°)最小转向半径/m90km·h-1100km·h-1110km·h-1120km·h-12.5998.087401)1068.8451)1713.7511)1232.9121)5745.138101)512.73521)978.14771)421.12312)7.5393.962101)312.51951)316.07772)398.87852)10175.09102)114.67223)206.52463)226.44033)12.5118.13323)136.97353)154.51573)173.50623)15117.9713)73.55261122.1329120.25152061.1555861.7391271.00057101.74022552.1973152.5203460.79884117.10633050.3752958.7487134.25853106.27253541.5186433.9081350.48833113.94764037.5974226.6745934.8117426.15684
注:1)为最小转向半径大于侧滑临界半径组别;2)为最小转向半径大于货车重心高度3.0 m临侧翻临界半径组别;3)为最小转向半径大于货车重心高度1.6 m侧翻临界半径组别
5.1二阶聚类模型应用假设检验
选择驶出角度进行聚类,将调整段长度、调整时间和转向半径作为连续变量,首先检验连续变量的正态性及相互独立性.SPSS中K-S正态性检验发现调整段长度与调整时间服从正态分布.由于二阶聚类模型具有良好的鲁棒性,因此仍选择三个变量参与分析.因转向半径不服从正态分布,使用Spearman检验变量独立性发现3个变量间存在较高相关性.理论上讲,若变量间相关性高,则二阶聚类结果的准确性会受到一定影响,但考虑到3个因素对驶出角度分类的重要程度,本文仍将它们一同在二阶聚类分析中使用.
5.2聚类分析结果
如表9所示驶出角度被聚类为3组,第1组调整段长度、调整时间的均值、标准差最高,最小转向半径最小,说明该组渐变段长度与调整时间离散度大,最小转向半径最小且集中,车辆发生侧滑或侧翻事故的概率最高.第3组调整段长度与调整时间的均值与方差最小,最小转向半径最大,车辆发生侧翻或侧滑事故的概率最小,因此,首选该组驶出角度进行紧急避险车道设计.第2组驶出角度介于1组和3组之间,地形条件限制时采取该组驶出角度.

表9 驶出角度均值与标准差
第1组驶出角度为15°~40°,第2组包含7.5°~12.5°驶出角度范围,第3组包含2.5°和5°驶出角度.
6结论
主线为直线且驶入速度介于90~120 km·h-1时,驶出角度宜设置在5°以内,如受地形条件限制,驶出角度宜控制在12.5°以内,且必须在紧急避险车道的引道设置超高.引道长度宜采取时间控制指标,根据3σ原则,驶出角度在5°范围内时,引道设计长度为6 s设计行程,当采用5°~12.5°的驶出角度设计值时,引道设计长度为9 s设计行程.
参考文献:
[1]王俊骅,方守恩,陈雨人,等. 高速公路特大交通事故预防技术研究及示范[M]. 上海:同济大学出版社,2011.
WANG Junhua, FANG Shouen, CHEN Yuren,etal. Study and demonstration of serious traffic accidents prevention technology on freeway[M]. Shanghai: Tongji University Press, 2011.
[2]梁志林. 河北省山区高速公路避险车道关键技术研究[R]. 石家庄: 河北省交通运输厅, 2010.
LIANG Zhilin. Research on key technology of truck escape ramp of mountainous expressway in Hebei province[R]. Shijiazhuang: Transportation Department of Hebei Province, 2010.
[3]中交第一公路勘察设计研究院有限公司. 公路路线设计细则[S]. 西安:中交第一公路勘察设计研究院有限公司,2008.
China Communications Construction First Highway Consultants Co. Ltd. Design detailed regulations for highway alignment[S]. Xi’an: China Communications Construction First Highway Consultants Co. Ltd., 2008.
[4]PAN Binghong,LIANG Ruijuan. Research on the efflux angle to emergency escape ramp of mountain roads[J]. Applied Mechanics and Materials, 2011, 97/98:257.
[5]牛建峰,王俊骅,董宪元. 山区公路紧急避险车道驶入角研究[J]. 重庆交通大学学报:自然科学版,2010(4):604.
NIU Jianfeng, WANG Junhua, DONG Xianyuan. Research on the angle to truck escape ramps of mountain road[J]. Journal of Chongqing Jiaotong University: Natural Sciences, 2010(4):604.
[6]苏波, 甄曦. 避险车道设计浅析[J]. 山西建筑,2011,37(25):150.
SU Bo, ZHEN Xi. Study on the design of truck escape ramp[J]. Shanxi Architecture, 2011, 37(25): 150.
[7]AASHTO. A policy on geometric design of highways and streets (Green Book)[S]. [S.l]:American Association of State Highway Transportation, 2001.
[8]张翱东. 避险车道常见事故与设计缺陷的原因分析[J]. 甘肃科技纵横,2013,42(2): 74.
ZHANG Aodong. Cause analysis of the common accidents occurred in the truck escape ramp and design defects[J]. Scientific & Technical Information of Gansu, 2013, 42(2): 74.
[9]Williams E C Jr. Emergency escape ramps for runaway heavy vehicles[R]. Washington D C: Federal Highway Administration, 1979.
[10]Tye E J. Design guide for truck escape ramps[R]. Sacramento: California Business, Transportation and Housing Agency, 1986.
[11]Witheford D K. Truck escape ramp[R]. Washington D C: Institute of Transportation Engineers, 1989.
[12]孙传夏. 避险车道设置的研究[J]. 交通标准化, 2008(6): 159.
SUN Chuanxia. Research on emergency lane layout[J]. Communications Standardization, 2008(6):159.
[13]金淳, 舒宏. 保税港区运作系统规划的VR仿真建模与实现[J]. 系统仿真学报, 2010, 22(4):1042.
JIN Chun, SHU Hong. Modeling and realization of virtual reality simulation system for operation system planning of free-trade Port Area[J]. Journal of System Simulation, 2010, 22(4):1042.
[14]杨少伟, 张碧琴, 许金良,等. 道路勘测设计[M]. 3版.北京: 人民交通出版社, 2009.
YANG Shaowei, ZHANG Biqin, XU Jinliang,etal. Road surveying and design[M]. 3rd ed. Beijing: China Communications Press, 2009.
[15]冯志慧. 基于驾驶员认知特征和视觉特性的高速公路景观设计方法研究[D]. 西安:长安大学, 2012.
FENG Zhihui. Study on freeway landscape design method based on drivers’ cognitive and visual characteristics[D]. Xi’an: Chang’an University, 2012.
[16]国际商业机器公司(IBM).统计产品与服务解决方案[C/CD]∥SPSS Statistics 17.0聚类分析[CP/DK]. 阿蒙克市:国际商业机器公司,2008.
IBM. Statistical product and service solutions[C/CD]∥SPSS Statistics 17.0 Cluster analysis. Armonk: IBM, 2008.
Departure Angle and Approach Length of Truck Escape Ramp
SONG Cancan1, GUO Zhongyin1, LIN Lin2
(1. Key Laboratory of Road and Traffic Engineering of the Ministry of Education, Tongji University, Shanghai 201804, China; 2. Expressway Authority of Shanxi Province, Taiyuan 030006, China)
Abstract:The motion data about the motor vehicle driving into truck escape ramp for 144 times by 5 drivers were obtained by driving simulation on UCWin Road Ver.9. Then the adjustment length, time and the minimum turning radius were extracted on basis of the steering velocity indexes. An analysis was made of the correlation between the above-said three indexes and the operation speeds, departure angles. Then, the setting range of the departure angle and the approach length was proposed based on two step cluster analysis. Research result indicates that the departure angle of truck escape ramp should be within 5°. The maximum departure angle should be controlled within 12.5° and the super elevation must be set during approach of truck escape ramp. Adjustment time is selected as the design index of the approach length. The required time value is 6 s when the efflux angle is within 5° whereas the value is 9 s when the efflux angle is between 5° and 12.5°.
Key words:truck escape ramp; driving simulation; departure angle; approach length
文献标志码:A
中图分类号:U491
通讯作者:郭忠印(1962—),男,教授,博士生导师,工学博士,主要研究方向为道路安全与环境.E-mail:zhongyin@tongji.edu.cn.
基金项目:山西省交通厅科技项目(2014-1-18);贵州省交通厅科技项目(2014-122-011)
收稿日期:2015—03—04
第一作者: 宋灿灿(1988—),女,博士生,主要研究方向为道路安全与环境.E-mail:77conshir@tongji.edu.cn.
