无人机飞行品质评定准则探讨
2016-05-23潘文俊樊战旗王敏文孙逊
潘文俊, 樊战旗, 王敏文, 孙逊
(西安飞行自动控制研究所 飞控部, 陕西 西安 710065)
无人机飞行品质评定准则探讨
潘文俊, 樊战旗, 王敏文, 孙逊
(西安飞行自动控制研究所 飞控部, 陕西 西安 710065)
摘要:基于无人机的任务特性,建议按照任务快速性与精确性的要求将无人机飞行阶段重新划分为4个阶段;在此基础上借鉴有人机飞行品质主观评定方法,修改给出了适用于无人机飞行品质主观评定的Cooper-Harper评价尺度;然后以纵向飞行品质客观评定准则为例,分析了有人机飞行品质评定准则对于无人机飞行品质评定的适用性,认为部分有人机飞行品质准则可借鉴应用于无人机飞行品质评定,但其准则边界必须针对无人机的飞行特性进行修改。通过研究,初步形成了无人机飞行品质评定准则研究框架,对无人机飞行品质评定具有一定的参考价值。
关键词:飞行品质; 无人机; 评定准则; Cooper-Harper评价尺度
0引言
无人机是近年来航空军事领域中一支异军突起的力量。随着航空技术的进步,其任务包线迅速扩展,在多种任务场景中可以辅助甚至替代有人机,在军民用领域中发挥着越来越重要的作用。
与无人机的迅速发展相比,无人机飞行品质评定的研究工作却进展缓慢,目前在工程设计中多直接选用有人机飞行品质规范或简单的任务指标进行评定。由于有人机和无人机的设计和操纵均存在不同,因此现行的有人机飞行品质规范并不完全适用于无人机。有人机飞行品质主要评定的是飞行员-飞机形成的这个闭环系统的交互响应特性。对于无人机而言,原来限制人机闭环的一些因素不再存在,如飞机过载、驾驶员响应速度等,故有人机与无人机的飞行品质评定存在着显著的不同,亟需研究专门针对无人机的飞行品质评定准则,以便更好地指导无人机飞行控制系统的设计。
已有研究主要对无人机飞行品质的特性进行了有益探索,给出了相关研究建议,但较少对无人机飞行品质的具体评定准则进行探讨[1-2]。本文详细讨论了无人机飞行阶段的划分、主/客观品质评定准则,分析了有人机飞行品质评定准则应用于无人机飞行品质评定的适用性和可能性。
1无人机飞行阶段划分
飞行品质总是针对相应的飞行阶段而言的,因此在研究无人机飞行品质前,首先必须明确其飞行阶段的划分。
GJB 185-86[3]中根据飞机在完成不同飞行任务时对飞行品质的不同要求,将飞机飞行阶段划分为A,B,C共3个阶段。各阶段包含的飞行任务如下:
(1)A阶段(战斗阶段)——要求急剧的机动动作,精确跟踪或精确控制飞行轨迹的飞行阶段,包括以下飞行任务要素(MTE):空战(CO)、对地攻击(GA)、武器投掷或发射(WD)、侦察(RC)、空中受油(RR)、地形跟踪(TF)、反潜搜索(AS)和密集编队(FF)。
(2)B阶段(航行阶段)——可能要求精确地控制飞行轨迹,但可通过缓慢的机动动作,无需精确跟踪就能完成的飞行阶段,包括以下MTE:上升(CL)、巡航(CR)、待机(LO)、空中加油(RT)、下降(D)、应急下降(ED)、应急减速(DE)和空投(AD)。
(3)C阶段(起落阶段)——通常采用缓慢的机动动作来完成,常常需要精确地控制飞行轨迹的飞行阶段,包括以下MTE:起飞(TO)、进场(PA)、复飞(WO)和着陆(L)。
以上关于飞行阶段的划分是根据有人驾驶飞机进行的。随着无人机飞行任务的拓展,原有飞行阶段的划分逐渐暴露出一些缺点。Mitchell等[4]认为原来的A阶段太过宽泛,涵盖了从空战到侦察的任务范围,在如此大的任务变化中使用相同的评定准则边界不能够有效地进行飞行品质评定;B阶段涵盖范围也较大,应该只适用于目视气象条件;而C阶段对于精确着陆等任务而言不够严格。
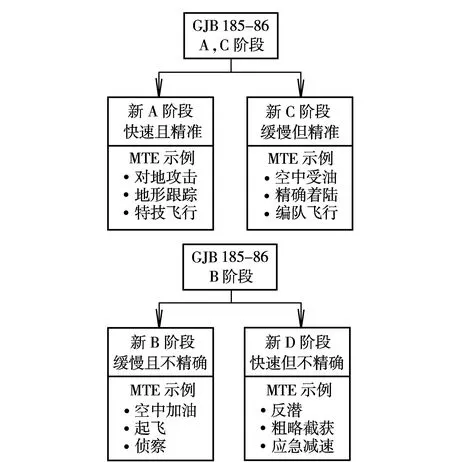
图1 建议的新飞行阶段划分Fig.1 Division of recommended new flight phases
Mitchell等建议根据飞行任务对快速性和精确性的要求,将原来传统的3个阶段划分修改为4个阶段,重新定义后的4个飞行阶段与传统的3个阶段划分的关系如图1所示。主要是将原来的A,C阶段中的MTE重新整理纳入新的A,C阶段中;而原来的B阶段则被拆分为新的B,D两个阶段。ADS-33E中即是根据这种思想,将飞行阶段重新划分为4个阶段[5]。
2无人机飞行品质评定准则
2.1主观评定准则
飞行品质的主观评定必须在一定的评价尺度下进行。有人机使用Cooper-Harper评价尺度(CHR)对其飞行品质进行主观评定,对于无人机,可借鉴CHR评价尺度的形式,将其修改为适用于无人机飞行任务评价的通用尺度[6],如图2所示。
有人机CHR评价的是在选定任务或操纵中对飞行员的要求,而无人机CHR注重评价无人机系统在给定任务中的性能表现,该尺度考虑了无人机执行任务中的外界环境扰动,从而使评定结果更贴近实际应用。
2.2客观评定准则
无人机与有人机最大的不同在于无人机通过传感器感受运动并通过飞控计算机、作动器进行控制补偿,而有人机运动感受和控制补偿都是通过驾驶员进行的,由此导致了二者飞行品质评价准则的不同。有人机飞控系统是基于“以驾驶员为中心”的理念设计的,其飞行品质的评定准则也是围绕驾驶员/飞机这个闭环系统的响应特性提出的,准则边界多根据驾驶员在环的飞行品质试验结果得出,因此,多数评定准则是不能直接用于无人机飞行品质评定的。
下面以纵向飞行品质为例,通过对有人机飞行品质典型评定准则的分析,探讨将其用于无人机飞行品质评定的适用性。
2.2.1频率与阻尼比
频率与阻尼比是对控制系统响应特性的一般性描述。GJB 185-86中关于纵向长/短周期的频率、阻尼比、倍幅时间的规定是基于驾驶员评价得出的经验性指标,体现了驾驶员的响应能力及对飞机运动的补偿能力。因此,将频率与阻尼比这两个在有人机飞行品质评定中使用非常广泛的指标应用于无人机飞行品质评定时,需根据无人机自动/自主飞行控制系统的响应能力及其对飞机运动的补偿能力,重新定义频率、阻尼比的范围,重点对频率的上边界、阻尼比的下边界进行重新定义。
2.2.2操纵期望参数
操纵期望参数(Control Anticipation Parameter,CAP)是一个应用较为广泛的短周期飞行品质评定指标,其定义为驾驶员操纵飞机纵杆后,飞机初始俯仰角加速度与稳态过载的比值,本质上是驾驶员前庭系统对于俯仰角加速度与过载感受的敏感性的比值。CAP建立了俯仰角加速度与飞机稳态过载的动态关联,而这种关联的基础是飞行员对这两个物理量的感知。因此,虽然CAP的数学形式可应用于无人机飞行品质评定,但具体的数值范围必须修改才能适用,因为无人机是通过陀螺和加速度计来对角加速度、稳态过载进行测量的,其测量灵敏度、测量范围与人类驾驶员必然有所区别。
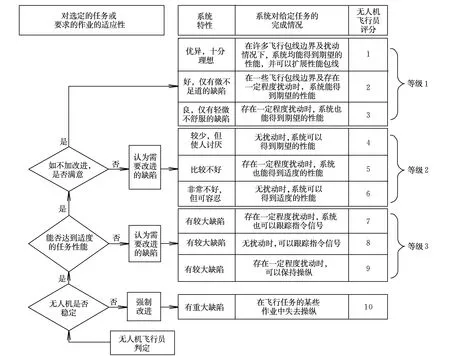
图2 无人机飞行品质Cooper-Harper评价表Fig.2 Cooper-Harper rating for unmanned aircraft vehicle
2.2.3低阶等效系统
低阶等效系统(Low Order Equivalent Systems,LOES)方法被广泛使用于对高阶系统的品质评定中。评定时将高阶系统等效为一个低阶系统和一个纯延迟的组合,采用“失配度”这一概念来衡量LOES对于高阶系统拟配的精确性。
失配度边界[7]反映了人类驾驶员不能察觉到的最大额外动态响应差异。如果低阶等效拟配后的飞机动态响应特性超出了这一边界,则驾驶员认为飞机响应与经典飞机响应有差异。失配度边界在驾驶员转角频率处有明显的收缩,说明在这一频率附近,驾驶员对于额外动态响应差异的感受非常灵敏。然而,对无人机进行低价等效系统拟配中,基于人类驾驶员得出的失配度边界需重新定义,并考虑无人机系统的转角频率。
另外,LOES失配度边界曲线是基于常规响应特性得出的,而无人机具有一些非常规的指令响应特性(如角速率保持指令、姿态保持指令等),相应地,失配度边界也需要通过必要的试验重新定义。
2.2.4Neal-Smith准则
Neal-Smith准则使用驾驶员模型与飞机模型构成闭环控制系统[7],通过分析该闭环系统对于俯仰跟踪任务的完成情况来评价飞行品质。准则的边界由驾驶员在环的飞行品质模拟试验结果得出。该准则假设驾驶员通过视觉、触觉完成闭环控制,并且努力调节自身的增益和相位,对俯仰跟踪任务进行补偿。闭环俯仰姿态跟踪带宽被固定为2.5 rad/s(着陆飞行时)或3.5 rad/s(机动飞行时)。由于Neal-Smith准则针对的是飞行员对给定系统的补偿适应能力,因此对无人机系统作用不大。然而,基于这一准则发展而来的带宽准则可以适用于不同系统性能的评价。
2.2.5带宽准则
控制系统的带宽体现了其在一定频率范围内对输入信号的跟踪复现能力。飞行品质中的带宽准则是由Neal-Smith准则发展得到的。该准则未指定闭环俯仰姿态跟踪带宽,允许带宽随系统性能而变,因此扩大了其适用范围。例如,战斗机可能具有较大的带宽,而运输机的带宽可能较小。
带宽准则属于频域准则,具体定义为:45°相位裕度处或6 dB幅值裕度处对应的较小频率之值。该准则的物理意义是人机闭环系统有一定的时间延迟或驾驶员将其控制增益增大为2倍而无需担心会导致飞机运动发散。虽然带宽准则是针对俯仰姿态闭环控制开发的,但也可以用于其他控制通道。
由以上分析可以看到,带宽准则可以适用于无人机的飞行品质评定,此时需要做的工作是寻找到无人机/传感器系统的一个“最大带宽”。在该带宽下,无人机系统可以确保完成给定任务。
3结论
本文仅就无人机飞行品质研究提出了建议与思路,评定准则最终的提出和确认需要飞行品质模拟试验与飞行试验数据的支撑。通过研究,初步得出以下结论:
(1)无人机飞行阶段可按照MTE对无人机控制的快速性与精确性的不同要求,重新划分为4个飞行阶段。这种飞行阶段的划分方式能够更直接地定义不同性能要求下的无人机飞行品质特性。
(2)无人机飞行品质评价也可通过CHR进行,但具体内容需要根据无人机的任务角色进行修改。
(3)有人机飞行品质评定准则应用于无人机飞行品质评定前必须进行适用性分析。从本文的分析结果来看,基于驾驶员模型的Neal-Smith准则不适用于无人机飞行品质评定,其余纵向品质准则也必须修改边界才可适用于无人机。
参考文献:
[1]陶于金,王建培.无人机飞行品质标准研究[J].飞行力学,2010,28(1):13-15.
[2]戴宁,杨晖.无人机飞行品质规范浅析[J].飞行力学,2005,23(4):13-15.
[3]国防科学技术工业委员会.有人驾驶飞机(固定翼)飞行品质GJB 185-86[S].北京:国防科学技术工业委员会,1986.
[4]Mitchell D G,Hoh R H,Aponso B L,et al.Proposed incorporation of mission-oriented flying qualities into MIL-STD-1797A[R].WL-TR-94-3162,1994.
[5]US Army Aviation and Missile Command.Aeronautical design standard performance specification handling qualities requirements for military rotorcraftADS-33E-PRF[S].US Army Aviation and Missile Command,2000.
[6]Cotting M C.Evolution of flying qualities analysis:problems for a new generation of aircraft [D].Virginia:Virginia Polytechnic Institute and State University,2010.
[7]方振平.飞机飞行动力学[M].北京:北京航空航天大学出版社,2005:109-110.
(编辑:崔立峰)
Discussion on flying qualities evaluation criteria of UAVs
PAN Wen-jun, FAN Zhan-qi, WANG Min-wen, SUN Xun
(Department of Flight Control, Xi’an Flight Automatic Control Research Institute,Xi’an 710065, China)
Abstract:Based on the task characteristics of Unmanned Aerial Vehicles (UAVs), we proposed flight phases of UAVs to be divided into four phases, according to the control requirements of aggressiveness and precision. Referring to Cooper-Harper rating scale for the piloted aircraft, a Cooper-Harper rating scale for evaluation of UAVs flying qualities was raised. Illustrated by the case of longitudinal flying qualities criteria, applicability of the piloted aircraft flying qualities criteria to UAVs flying qualities evaluation was discussed. Research results indicate that a part of the piloted aircraft flying qualities criteria can be applied to evaluate UAVs flying qualities, but with modifications to margins of the criteria. This research work has a certain reference value for the evaluation of UAVs flying qualities.
Key words:flying qualities; UAVs; evaluation criteria; Cooper-Harper rating scale
中图分类号:V212.1; V279
文献标识码:A
文章编号:1002-0853(2016)01-0006-04
作者简介:潘文俊(1985-),男,陕西榆林人,工程师,博士,研究方向为飞行控制律设计与品质评定。
收稿日期:2015-06-05;
修订日期:2015-09-30; 网络出版时间:2015-10-09 14:41
