运输机超低空空投下滑阶段PIO趋势评估与抑制
2016-05-23吕茂隆孙秀霞王栋刘日徐光智
吕茂隆, 孙秀霞, 王栋, 刘日, 徐光智
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
运输机超低空空投下滑阶段PIO趋势评估与抑制
吕茂隆, 孙秀霞, 王栋, 刘日, 徐光智
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
摘要:提出了超低空空投下滑阶段的PIO问题,研究了空投下滑拉平阶段产生PIO的主要原因。基于描述函数法分析了速率限制反馈(RLF)PIO抑制系统的相位补偿能力和PIO产生机理,推导了抑制PIO发生的计算公式。应用RLF连续信号相位补偿法抑制PIO的发生,对阶跃、离散和正弦三种易于诱发PIO现象的跟踪任务进行了数值仿真。结果表明,超低空空投下滑拉平阶段会发生PIO,严重威胁飞行安全,RLF对PIO具有较好的抑制效果。
关键词:超低空空投; 驾驶员诱发振荡; Neal-Smith准则; 速率限制反馈抑制器
0引言
运输机超低空空投主要用于重型武器、载人装备的精确投放,是提高现代高技术战争条件下作战能力的必要手段[1-2]。超低空空投过程包括准备、下滑、改平、牵引和拉起五个阶段。为保证运输机空投下滑阶段快速精确地跟踪基准下滑轨迹,驾驶员需频繁操纵飞机来调整下滑轨迹,所以这是一个人机交互频繁的过程。在人机交互过程中,驾驶员易受自身(精神高度紧张)或环境因素[3-4](如大气紊流、降雨等)的影响而做出不当操纵,并诱发不同程度的PIO。
目前,舵机速率限制问题已成为引起电传飞机PIO的主导原因[5]。提高舵机速率可抑制PIO,但是因舵机重量和尺寸的限制,该方法未能被广泛应用[6]。此外,运用相位补偿技术也可抑制PIO的发生[7]:一是减少了驾驶杆命令增益或减少了反馈控制增益;二是速率饱和被激活时能对系统进行相位补偿,可采用逻辑条件法和连续信号法设计相位补偿系统。逻辑条件法仅在控制系统需要相位补偿时工作,而连续信号法对控制系统产生持续的补偿信号,更为有效[8]。
本文首先提出了超低空空投下滑拉平阶段的驾驶员诱发振荡问题,建立了含速率限制器的人机闭环系统数学模型;其次,应用Neal-Smith准则对PIO趋势进行评估,基于描述函数法探究了PIO的产生机理,并获得了抑制PIO的方法;最后,运用描述函数法研究了RLF抑制系统相位补偿能力,并以某运输机为算例进行了仿真,验证了RLF抑制PIO的有效性。
1PIO趋势评估准则及参数计算方法
超低空空投下滑阶段是驾驶员对俯仰角控制来精确跟踪基准下滑轨迹的关键阶段。本文采用Neal-Smith准则预测PIO趋势,准则在如图1所示的闭合回路中假设了一个包含式(1)驾驶员模型的闭环系统:
(1)
式中:Kpe为驾驶员操纵增益;Tp1,Tp2分别为驾驶员超前、滞后补偿参数,各参数在满足人机闭环带宽ωBW(反映快速性)和下沉量Δ(反映跟踪性)要求下进行优化求得。

图1 含驾驶员模型的单位反馈系统Fig.1 Unit negative feedback systems including pilot model
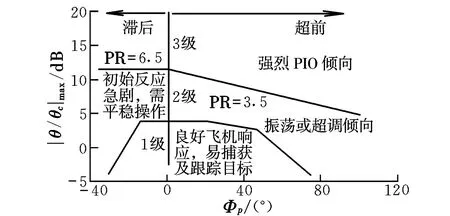
图2 Neal-Smith参数平面Fig.2 Neal-Smith parameter plane
(2)
Neal-Smith准则对空投下滑拉平阶段进行PIO趋势评估的具体步骤如下[9]:
(1)选择与空投任务相适应的带宽频率ωBW;
(2)调整驾驶员参数,获得最佳闭环特性;
(4)根据图2评估运输机飞行品质。
2PIO致因及防范措施
2.1PIO致因分析
舵机速率限制已被视为导致发生PIO的主要诱因。原因如下:一是舵机速率限制造成了驾驶员操纵增益的减小,而驾驶员误将这种滞后看作是控制效果的降低,从而使用更大的控制输入,导致产生PIO;二是舵机速率限制在实际控制面和指令控制面位置之间产生额外的相位滞后或延迟,增加了驾驶员输入和飞机响应之间的延迟。上述两种情况如图3所示,速率限制不严重时,舵机指令和舵机实际位置不一致,即输入与输出之间产生时间延迟,见图3(a);速率限制严重时,输出除相位延迟外还有幅值的明显衰减,见图3(b)。
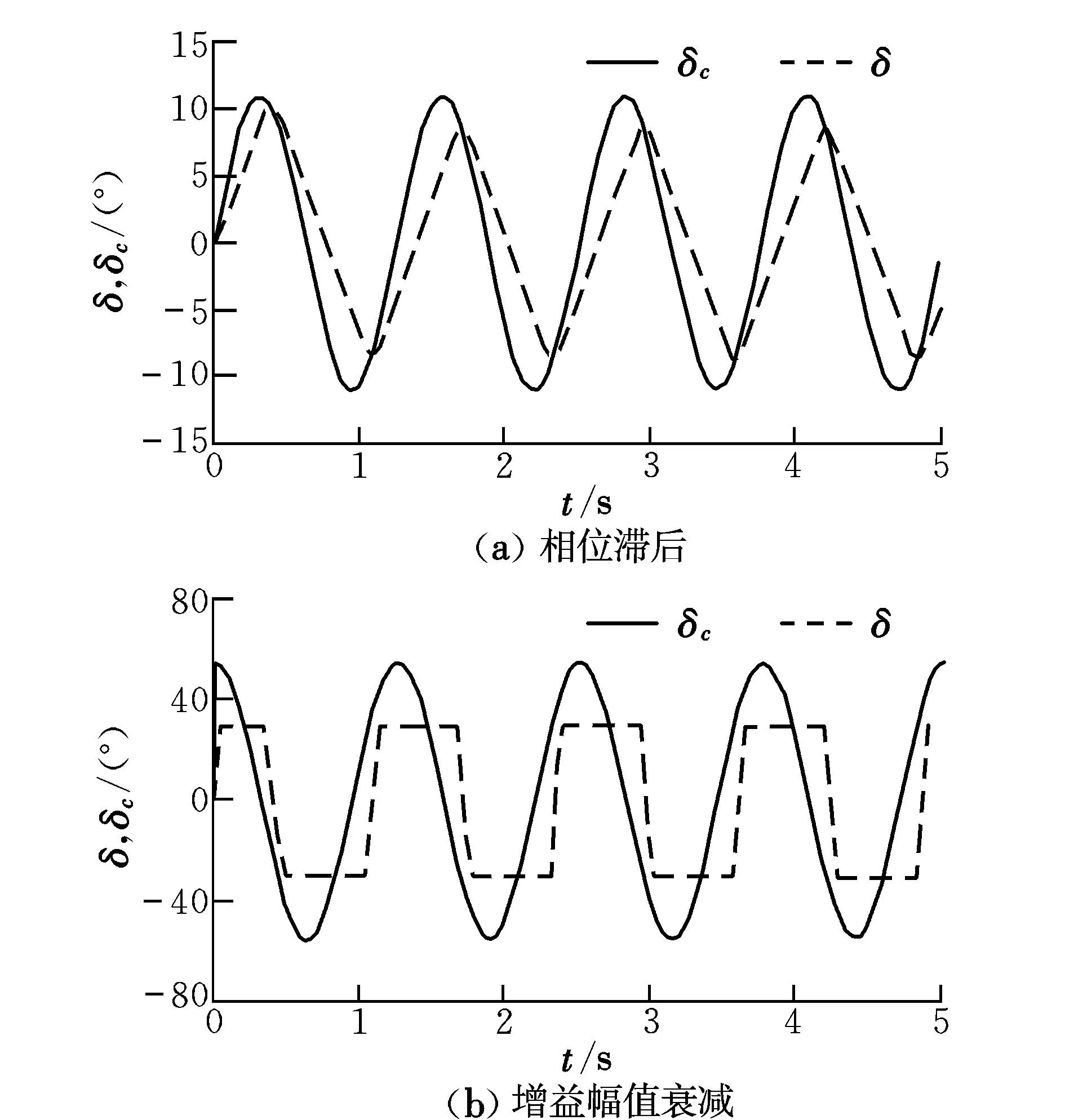
图3 饱和时速率限制环节时域响应Fig.3 Time domain response of saturated speed limit
2.2PIO防范措施
速率限制反馈抑制系统(RLF)是根据连续信号法设计的抑制系统。该系统由一个速率限制反馈和一个用于补偿相位滞后的相位超前网络构成,其结构如图4所示[9]。
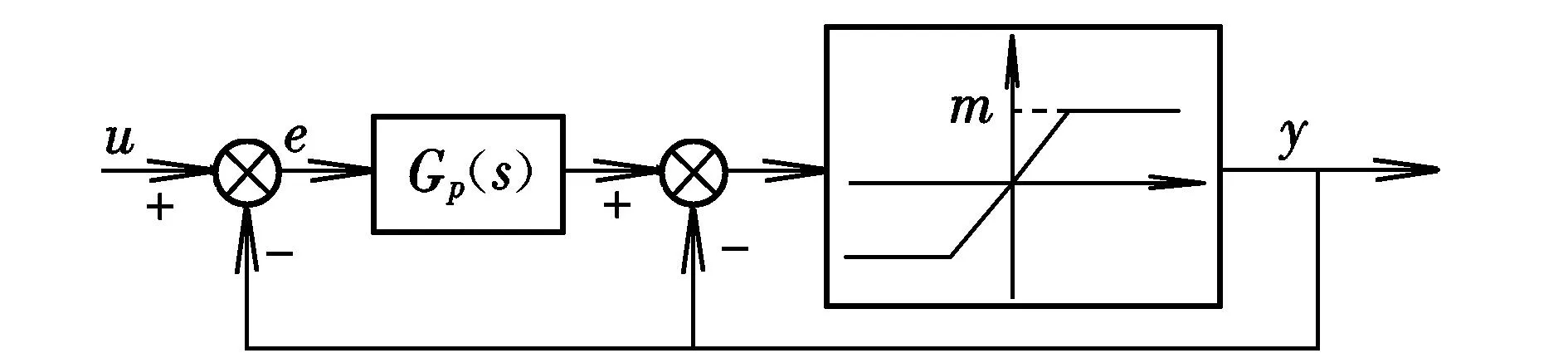
图4 RLF抑制器结构框图Fig.4 RLF suppressor structure diagram
采用RLF抑制器的人机闭环系统如图5所示,驾驶员模型采用同步驾驶员模型[10],其中:
(3)

图5 含RLF抑制器的人机闭环系统Fig.5 Closed-loop pilot-vehicle system including RLF suppressor
图中:θ为运输机俯仰角;θc为俯仰角指令;θe为俯仰角误差;δc为操纵面指令;δ为操纵面偏角。用描述函数法分析图5的非线性人机闭环系统,将人机闭环系统中的驾驶员、飞机本体等线性环节并入线性传递函数G(jω),用描述函数N(A,jω)表示速率限制舵机模型(G(jω)仅是频率的函数,N(A,jω)是幅值和频率的函数)。人机闭环非线性系统的闭环频率特性可写为:
(4)
上述非线性人机闭环系统稳定性取决于:

(5)
由式(5)得:
(6)
于是,线性传递函数成为描述函数的负倒数。G(jω)和-1/N(A,jω)的切点或交点即为闭环系统不稳定点。描述函数法对PIO进行预测的具体步骤如下:
(1)判定系统是否满足函数描述法的应用条件;
(2)若满足,则将速率限制环节负倒数描述函数和线性传递函数绘于同一Nichols图中(见图6);
(3)利用两曲线之间相对位置判断人机非线性系统的稳定性;
(4)若两条曲线相切或相交,则切点和交点即为不稳定点。
抑制系统是否能抑制Ⅱ型PIO,取决于下式是否无解:
(7)
式中:∠Φ(A,jω)为抑制系统所能提供的相角。
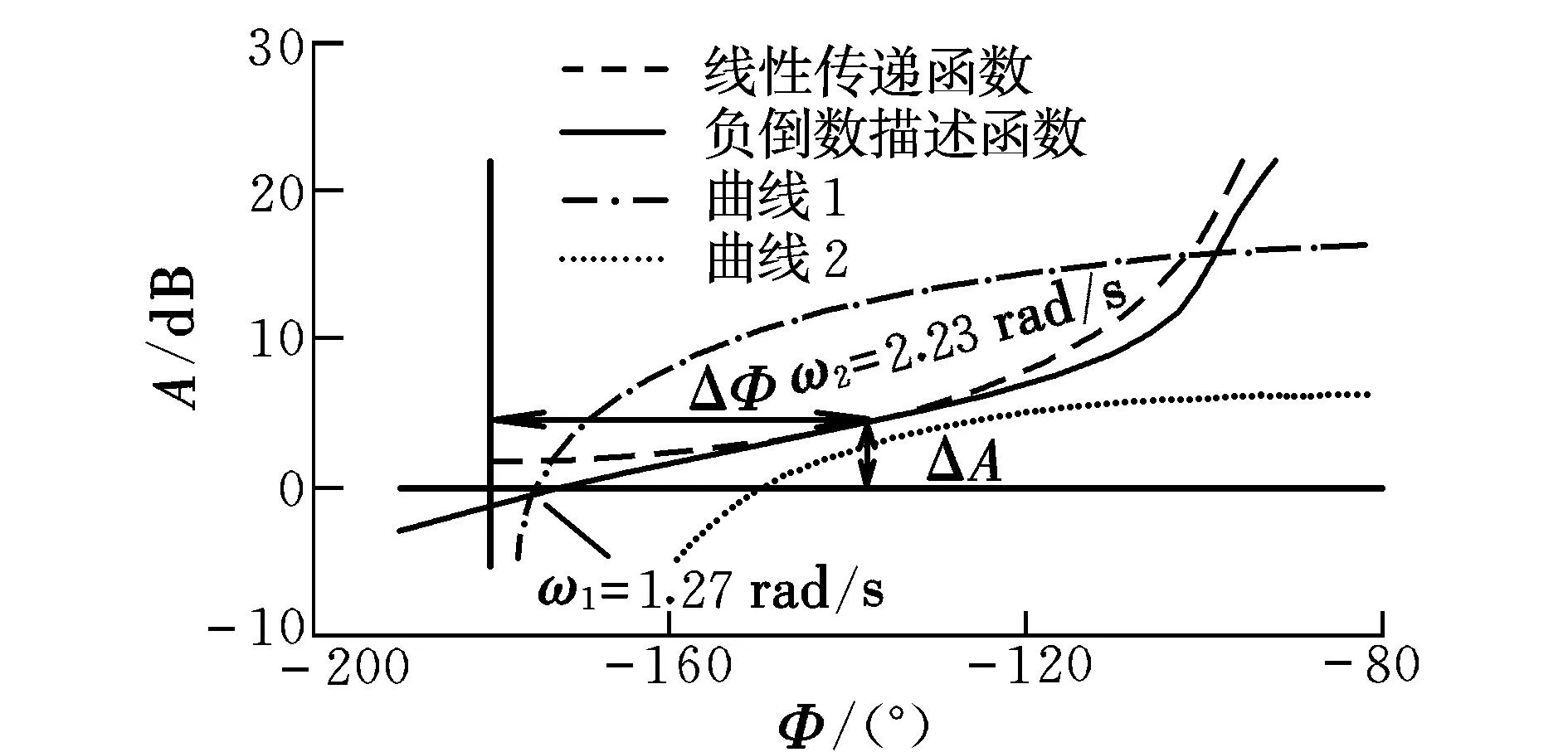
图6 人机闭环系统Nichols图Fig.6 Closed-loop pilot-vehicle system Nichols chart
从图6可以看出:未加RLF时,线性传递函数曲线1和非线性描述函数曲线相交于两个交点,RLF需提供在1.27~2.23 rad/s范围内使系统稳定所需的相角,使两条曲线既无交点也无切点; RLF抑制器使线性传递函数曲线2和非线性描述函数曲线相分离,两曲线无交点,RLF补偿了系统稳定所需相角,抑制了PIO的发生;因舵机速率限制引起的相位滞后ΔΦ=-40°和幅值衰减ΔA=-4.68 dB。
3仿真验证与分析
3.1RLF性能分析

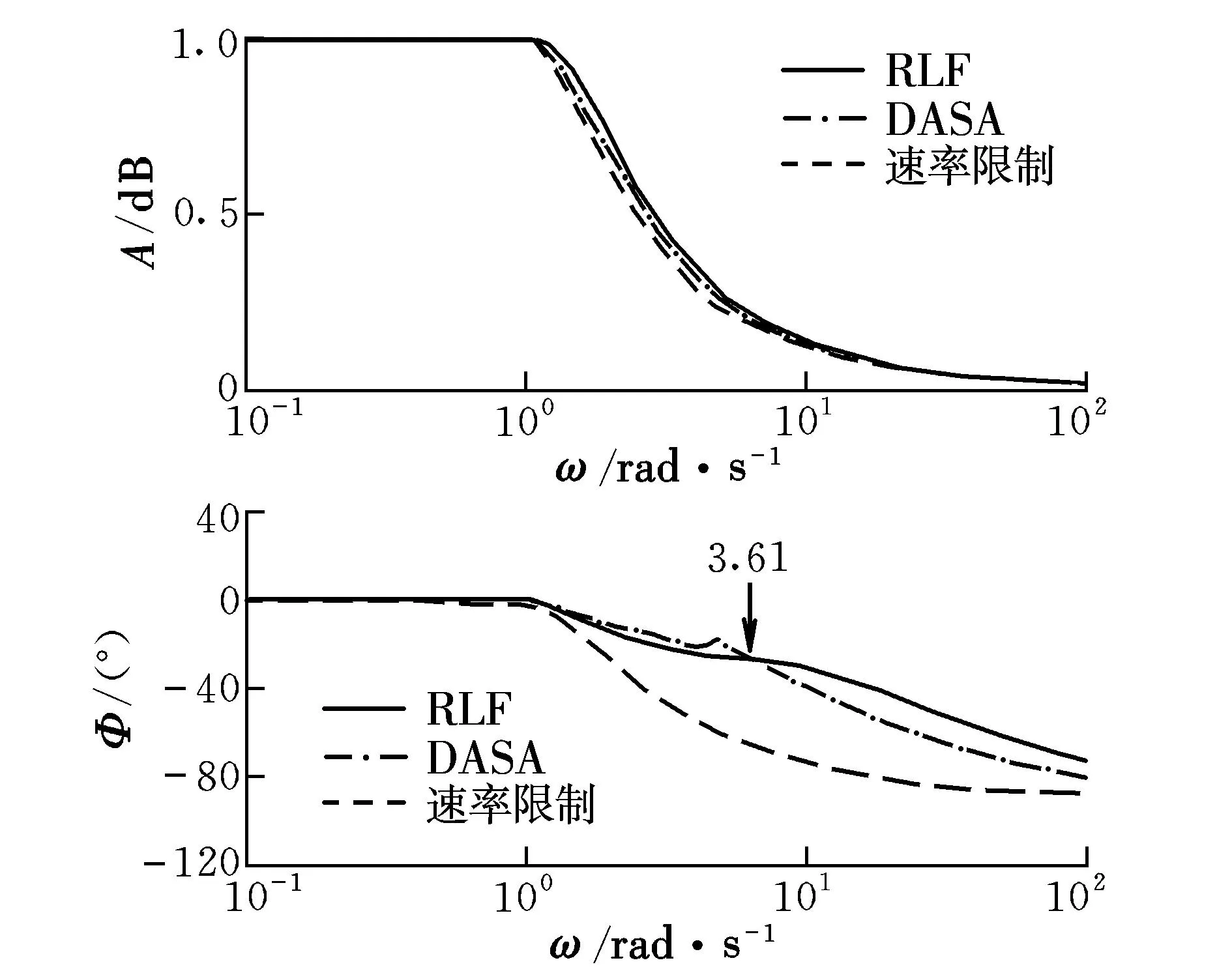
图7 两种抑制器Bode图Fig.7 Bode charts of suppressors
可以看出,RLF和DASA的幅值变化基本一致,当ω>3.61 rad/s时,RLF抑制器补偿的相位量较DASA明显增多,即RLF具有更好的相位补偿能力,抑制PIO效果强于DASA。
3.2RLF抑制空投下滑PIO效果验证
本文选某型运输机A,传递函数取式(3),Neal-Smith准则指标如表1所示。
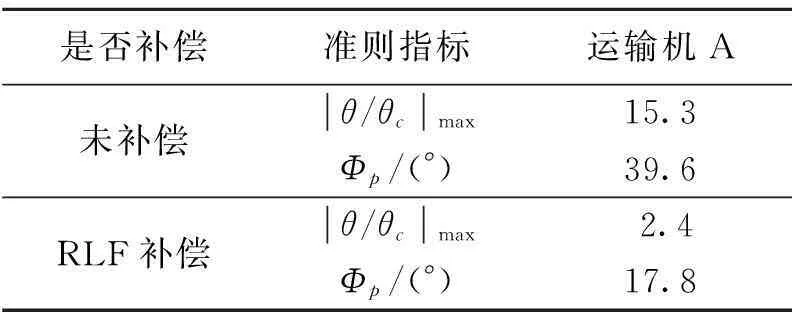
表1 Neal-Smith准则评价指标
根据图2进行预测评估,评估结果表明:未补偿时,运输机A飞行品质为3级,有PIO趋势;RLF补偿后,飞行品质为1级,无PIO趋势。
根据某运输机A的数据,取a=2,b=5,VL=±15 rad/s,Gp(s)=3.28,针对不同任务,对图5的人机闭环系统进行仿真。
3.2.1阶跃跟踪任务
阶跃跟踪任务是一种典型的跟踪任务,可使速率限制器工作于恶劣的环境中,10°阶跃输入时域仿真结果如图8所示。可以看出:未加RLF的飞机出现了持续的俯仰振荡,且振荡趋势发散,这与评估结果一致,说明空投下滑拉平阶段同样会发生PIO,特别是在进入下滑轨道调整飞行姿态时更易发生PIO,造成下滑轨迹偏差瞬间增大,运输机失控,严重威胁飞行安全;加入RLF使俯仰角超调量小且调节时间短,最终使俯仰角良好地跟踪10°阶跃输入指令,运输机的飞行状态变得稳定,成功抑制了PIO。
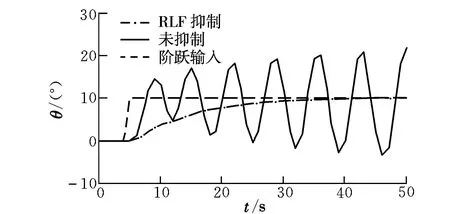
图8 人机系统10°阶跃输入时间响应Fig.8 Ten degrees step input time responses of pilot-vehicle system
3.2.2离散俯仰跟踪任务
为进一步测试RLF抑制器的性能,采用MIL-STD-1797A中的离散俯仰跟踪任务,对该运输机的仿真结果如图9所示。
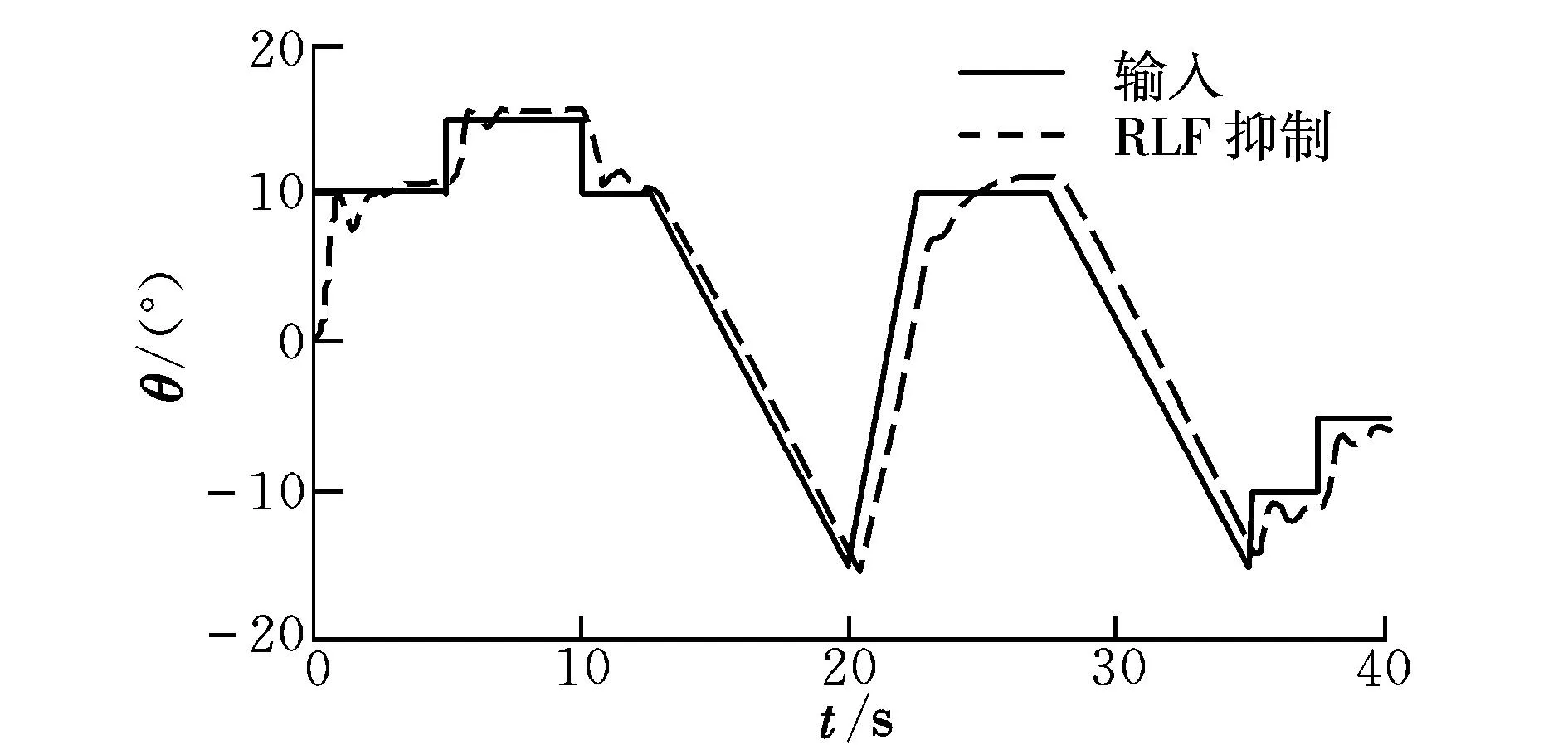
图9 人机系统离散输入时间响应Fig.9 Discrete input time responses of pilot-vehicle system
可以看出,RLF使飞机的俯仰角输出信号较好地跟踪了离散输入信号,起到了较好抑制PIO的作用。
3.2.3正弦跟踪任务
正弦跟踪任务出现在跟踪任务的最后阶段,正弦跟踪任务较离散俯仰跟踪任务更易发现飞机的PIO趋势,其目的是用于发现相位滞后,对该运输机的仿真结果如图10所示。
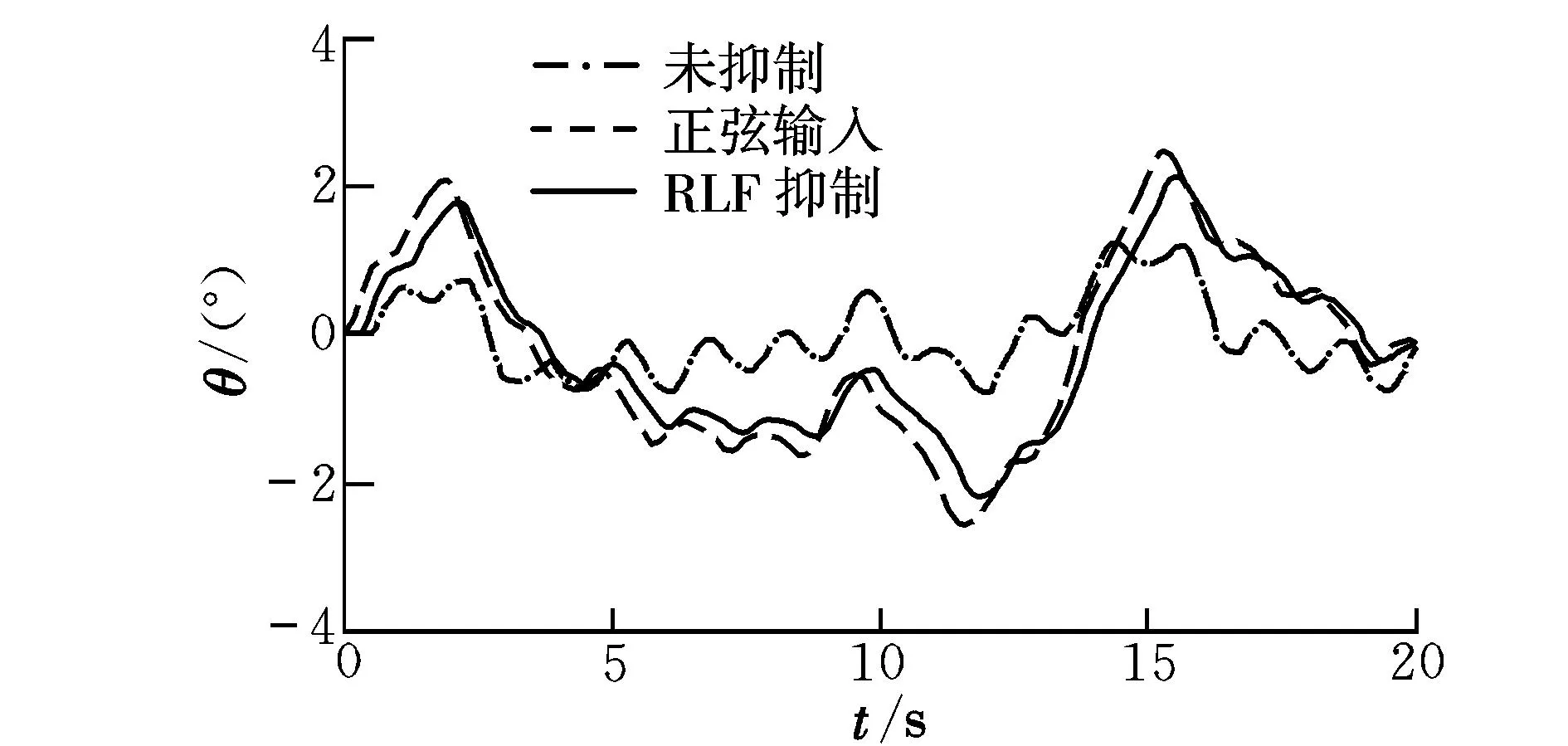
图10 人机系统正弦输入时间响应Fig.10 Sine input time responses of pilot-vehicle system
可以看出,RLF抑制器消除了运输机的持续振荡,且使俯仰角输出信号较好地跟踪了输入信号。
4结束语
超低空空投是一个高精度、快速跟踪的过程,若操纵不当,极易引发PIO问题。本文基于描述函数法探究了空投过程PIO产生机理,推导了抑制PIO发生的公式,在研究RLF抑制器的基础上,将其应用到PIO的抑制中。从时域仿真角度对抑制器的抑制效能进行了验证,通过Neal-Smith准则评估取得了与数值仿真一致的结论,可为我国运输机超低空空投下滑阶段的飞控系统设计提供参考。
参考文献:
[1]Liu Ri,Sun Xiuxia,Dong Wenhan.Dynamics modeling and control of a transport aircraft for ultra-low altitude airdrop[J].Chinese Journal of Aeronautics,2015,28(3):478-487.
[2]Liu Ri,Sun Xiu-xia,Dong Wenhan,et al.Dynamics modeling andL1adaptive control of a transport aircraft for heavyweight airdrop[J].Mathematical Problems in Engineering,2015(01):1-15.
[3]杨雨,陆宇平,戴正升.基于动态逆的超低空空投抗侧风控制器设计[J].飞行力学,2013,31(1):37-41.
[4]李智,陆宇平.运输机超低空空投抗侧风控制器设计[J].飞机设计,2011,31(6):32-36.
[5]Smith R H.Flight vehicle integration panel workshop on pilot-induced-oscillations:observations on PIO [R].AGARD-AR-335,1995.
[6]Alcala I,Gordillo F,Aracil J.Phase compensation design for prevention of PIO due to actuator rate saturation[C]//American Control Conference.Boston,MA,USA,2004:4687-4691.
[7]Liebst B S,Chapa M,Leggett D.Nonlinear profiler to prevent pilot-induced oscillations due to actuator rate limiting [J].Journal of Guidance,Control,and Dynamics,2002,25(4):740-747.
[8]Gatley S L,Turner M C,Postlethwaite I,et al.A comparison of rate-limit compensation schemes for pilot-induced-oscillation avoidance [J].Aerospace Science and Technology,2006,10(1):37-47.
[9]孟捷,徐浩军,张建康.II型PIO反馈与前馈抑制系统对比[J].航空学报,2010,31(9):1701-1707.
[10]高金源,李陆豫,冯亚昌,等.飞机飞行品质[M].北京:国防工业出版社,2003:77-85.
[11]曹启蒙,李颖晖,张煜,等.反馈结构RLF补偿器在抑制Ⅱ型PIO中的应用研究[J].飞行力学,2011,29(5):10-13.
[12]李颖晖,朱广东,曹启蒙,等.前馈结构DASA抑制器在抑制PIO中的应用研究[J].飞行力学,2012,30(3):213-217.
(编辑:崔立峰)
Evaluation and suppression of PIO tendency during ultra-low altitude airdrop of transport airplanes
LYU Mao-long, SUN Xiu-xia, WANG Dong, LIU Ri, XU Guang-zhi
(Aeronautics and Astronautics Engineering College, AFEU, Xi’an 710038, China)
Abstract:The PIO problem in ultra-low altitude airdrop is put forward and the main causes of the PIO are analyzed. The phase compensation capability of RLF and mechanism of the PIO suppression are studied based on describing function method. The expression to prevent PIO is derived. The RLF phase compensating method is applied to avoid PIO. Step, discrete and sine tracking tasks are employed to study the suppression capability of the RLF suppresser in time domain simulation.The simulation results indicate when the rate limiter is saturated; the additional time delay might cause PIO during the ultra-low altitude airdrop process and threaten the safety of flight. The RLF suppresser works well in preventing the nonlinear PIO.
Key words:ultra-low altitude airdrop; PIO; Neal-Smith criterion; RLF
中图分类号:V212.1
文献标识码:A
文章编号:1002-0853(2016)01-0026-05
作者简介:吕茂隆(1991-),男,四川绵阳人,硕士研究生,主要研究方向为飞机飞行品质;孙秀霞(1962-),女,山东潍坊人,教授,博士生导师,博士,主要研究方向为现代鲁棒控制和飞行控制。
基金项目:国家自然科学基金资助(60904038);航空科学基金资助(20141396012)
收稿日期:2015-05-12;
修订日期:2015-09-02; 网络出版时间:2015-09-28 14:00
