功率硬件在环仿真稳定性分析及功率接口研究
2016-05-23尹晨旭崔晓飞皮一晨孙建军查晓明
许 中 ,尹晨旭 ,刘 邦 ,崔晓飞 ,皮一晨 ,刘 欣 ,孙建军 ,查晓明
(1.广州供电局有限公司,广东 广州 510001;2.武汉大学 电气工程学院,湖北 武汉 430072)
0 引言
功率硬件在环PHIL(Power Hardware In the Loop)仿真技术作为电力系统仿真技术的潮流和方向,是目前国内外研究的热点[1]。PHIL主要由3个部分组成:实时数字仿真系统;待测设备;连接硬件与软件的接口装置。PHIL系统通过在实时数字仿真系统中搭建电力系统模型,对模型当中的电压量或电流量通过D/A环节输出,作为控制指令信号,控制功率接口装置输出指令电压或电流到被测设备,采用输出电流或电压反馈到数字仿真侧,形成闭环仿真系统。PHIL仿真技术具有一些优势,它可以对电力系统设备在模拟的电网条件下反复进行模拟试验,模拟极端的电力系统仿真环境,从而检测电气设备的运行状态,最大限度地减少了试验成本与试验风险。文献[2]提出大量的电气应用实例,文献[3]将实时仿真装置驱动放大器作为扰动装置模拟电网发出谐波、电压暂降等功能,文献[4]中提出一个5 MW PHIL测试平台,文献[5-6]对应用PHIL进行电机拖动试验进行了介绍。PHIL技术对电气设备的设计、测试和应用都提供了极大的帮助[7-8],这是常规的离线仿真无法比拟的。因此,在智能电网高速发展的今天,PHIL的发展与应用正面临一个极好的机遇。
功率接口装置作为连接数字仿真与被测设备的重要环节,对PHIL仿真的稳定性与精度起到至关重要的作用,可实现指令信号安全、高效率且不失真(或失真在运行范围内)地输出。理想情况下,实时仿真装置与待测设备之间的接口装置具有无穷大带宽、零延时和增益为1的特点,然而,理想的接口是不可能实现的。PHIL仿真当中功率接口装置中延时、噪声污染和谐波注入等[9],都影响了大功率接口装置的精度与稳定性,产生的误差较大时,甚至导致系统不稳定,损坏被测电气设备。
本文提出的仿真接口装置每一相都采用背靠背H桥型电路结构,对稳定性、动态性能及输出带宽都有一定的要求,所以控制策略的设计尤为重要,以电压型接口为例[10],常用的电压型逆变器控制策略如双闭环控制[11],一般用电压外环和电流内环共同抑制扰动,是一种理想的波形控制方案,但难以克服非线性扰动,因为数字的电流内环很难快速动作消除;状态反馈控制[12]是通过更改闭环系统的极点改善系统的动态性能,但这种方法对模型参数依赖性很强,只能针对空载和已经设定的负载进行建模,而且系统在参数和负载变化时容易产生稳态偏差和动态特性的改变;无差拍控制[13]建立在被控对象的离散数学模型的基础上,它通过准确的数学模型来确定下一时刻的控制信号,其优点在于动态响应速度快,而缺点是它的计算依赖于精确的数学模型,鲁棒性差;模糊控制[14]是不依赖于控制对象的数学模型,它根据经验与规则进行模糊推理,根据实际变化确定控制器的最佳参数,对非线性负载有很强的适应能力,但控制精度不高,一般与常规方法结合应用;重复控制[15]是由内模原理演变而来,具有控制算法简单、精度高、稳定性强等优势,适用于本文的功率接口装置的性能要求。
本文首先基于PHIL接口算法建立数学模型,详细分析PHIL的稳定性及不稳定因素,指出接口产生的延时与带宽限制等问题是造成系统不稳定的主要原因,因此,可采用稳定性较高的重复控制策略作为功率接口的控制策略,并结合电压外环P控制器的复合控制策略,保证功率接口的稳定性、动态性能。PHIL试验以380 V、50 kW功率接口装置,实现了复杂系统的混合实时仿真,其稳态特性好、动态响应快、仿真带宽较大、鲁棒性强及仿真精度高,具有极强的工程使用价值,为硬件在环仿真技术的研究、发展提供了基本保障和良好的平台。
1 PHIL仿真模型
PHIL仿真系统的系统框图如图1所示。以电压型接口等效模型为例,数字仿真侧的电网模型通过戴维南定理等效为电压源U1、阻抗Z1,被测设备侧通常是新能源设备、电力电子装置等,所以通过戴维南定理等效为电压源U2、负荷阻抗Z2,这种等效方式通常被称为理想变压器等效模型[16]ITM(Ideal Transformer Model)。 图 1(a)中被测设备侧电压源 U′1受控于数字侧的电压U1,被测设备侧的输出电流作为反馈信号控制数字侧的受控电流源为受控电流源并联电阻。如图1(a)所示,同样的等效模式适用于电流源型接口模型等效。

图1 PHIL等效电路Fig.1 Equivalent circuit of PHIL
PHIL系统中存在以下影响仿真稳定性与精度的因素[17]:PHIL仿真延时环节,虚拟侧输出的信号要经过D/A转换环节,物理侧采用的模拟量要经过D/A采样环节转换为数字信号即TDAC;功率接口延时与带宽限制,数字仿真侧输出的信号量要作为指令信号控制功率接口装置,由于功率接口装置本身具有硬件延时,如控制器数据采样、处理、计算,功率接口电路出口的LC滤波器等形成一个具有延时的有限带宽环节TVSC。由此,可以得到PHIL仿真的开环传递函数TOL:

PHIL仿真系统是闭环仿真模型,包含数字侧仿真模型、D/A环节、功率放大器装置、被测电气设备。为了分析接口设备特征的影响,这里将DAC(数字量转换为模拟量模块)、ADC(模拟量转换为数字量模块)延时环节和功率接口近似等效为一个延时环节其中td为延迟时间。因此,如图2所示,不考虑U2的扰动作用,PHIL仿真系统可等效为开环传递函数:

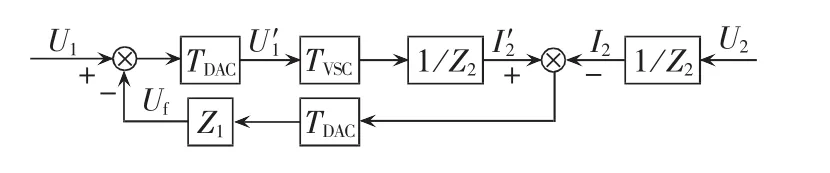
图2 PHIL结构示意图Fig.2 Structure of PHIL
以一阶阻感电路为例,假设Z1=sL1+R1、Z2=sL2+R2,PHIL系统的闭环传递函数的特征方程如下:

由 Pade 等效[18]得出:

当,进一步等效特征方程得到:

相比电感值,k的值比较小,近似等效如下:

由式(6)可得,当L2>L1时系统稳定。同样的分析理论可以应用在电流型接口模型中。由以上的分析可以得出:PHIL仿真接口产生的误差是导致系统不稳定的主要原因;PHIL仿真中数字侧仿真阻抗与被测设备侧的阻抗大小也是影响系统稳定的重要因素。所以,为了提高系统的仿真稳定性,功率接口装置的设计至关重要。
2 功率接口设计
本文主要针对功率接口逆变侧进行分析、设计,如图3所示。首先,三相分别采用独立的H桥型电路结构,更好地应对三相不平衡等极端的运行状态。为了消除开关次高频谐波,出口采用LC滤波器[19]。由于受调节带宽和增益裕度的限制,传统的PI(Proportional Integral)调节器已经难以实现对交流成分甚至高次交流成分的有效调节。

图3 仿真接口电路Fig.3 Interfacing circuit of simulation
重复控制源于控制理论当中的内模原理[20-21],它将系统外部信号的数学模型植入控制器中,从而构成高精度反馈控制系统,重复控制器将前一周期的控制误差累加到当前控制量的生成中,如图4中的Bode图所示,它对周期性扰动具有非常强的抑制能力,对周期性指令信号有很好的追踪能力。如图5所示,可得出本文重复控制框图与式(7)。

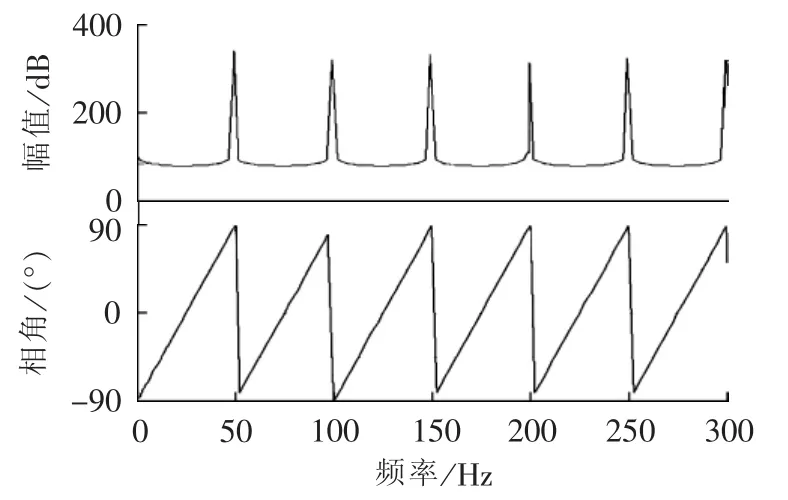
图4 重复控制Bode图Fig.4 Bode diagram of repetitive control
本文结合文献[22]提出的复合式重复控制器方案,采用基于重复控制和电压前馈P控制调节器复合的控制策略。
当指令电压不变时,由于稳态电压误差足够小,这时主要应用重复控制器来进行控制,相对PI控制具有更好的稳态精度;而当指令电压突变时,电压误差变大,重复控制有一个基波周期的延迟,所以输出不会即刻产生变化,此时主要由电压前馈P控制进行指令的动态跟踪,从而有效地克服了重复控制器的动态响应延迟问题,保证系统动态响应的快速性。RP-P控制器的架构如图5所示,图中Uref为指令电压信号;Uo为输出电压信号;Ks、Kf、Kr为 RP 控制的控制参数;C(s)为镇定补偿器,包括幅值补偿和相位补偿;Kp为P控制器的控制参数;Kc为有源阻尼系数;由A/D转换和计算、采样等造成的延时近似等效为传递函数 Gd(s)≈e-sTs;id为负载电流;iC为电容电流;GVSC为逆变器的传递函数。
3 仿真实验
3.1 PHIL仿真

图5 功率接口控制框图Fig.5 Block diagram of power interface control
为进一步测试本文设计的功率接口的仿真精度,基于离线仿真MATLAB/Simulink搭建了如图6所示的仿真模型,取 Kr=2、Ks=1.5、Kf=0.9、Kp=1.2、Kc=8、L=0.2 mH、C=60 μF、Gvsc=Kpwm=400,重复周期为T=0.02 s。功率接口分别接入线性负载与非线性负载,再与原电路模型的输出电压uout、输出电流iout及PHIL输出电压uIout、输出电流iIout相比较,仿真中输出的电压、电流量采用标幺值表示,分别进行线性负载与非线性负载仿真,得到PHIL输出电压波形、电流波形与原电路电压误差、电流误差分别如图7、图8所示。本文中设计的功率接口电路结构与控制策略可以稳定地输出周期性电压、电流波形,并且误差较小、精度较高。

图6 仿真示意图Fig.6 Schematic diagram of simulation
3.2 试验验证
为了验证上述理论分析的正确性和本文所提出的控制策略的有效性,搭建PHIL试验平台,数字实时仿真装置采用实时仿真器RTDS(Real Time Digital Simulator),电力系统仿真步长可达到 50 μs,可以充分实现PHIL系统仿真试验。如图9所示,在RTDS中搭建电压源电路,输出电压信号控制功率接口,负载采用不可控整流阻感非线性负载。同时,研制380 V、50 kW功率接口装置,系统电压等级为380 V,每相采用背靠背H桥型换流器的结构,单元直流电容器C=10 mF,出口滤波采用LC滤波器,Lo=0.2 mH,Co=60 μF。 开关频率 fs=12.8 kHz,采用正弦脉冲宽度调制SPWM(Sinusoidal Pulse Width Modulation)。
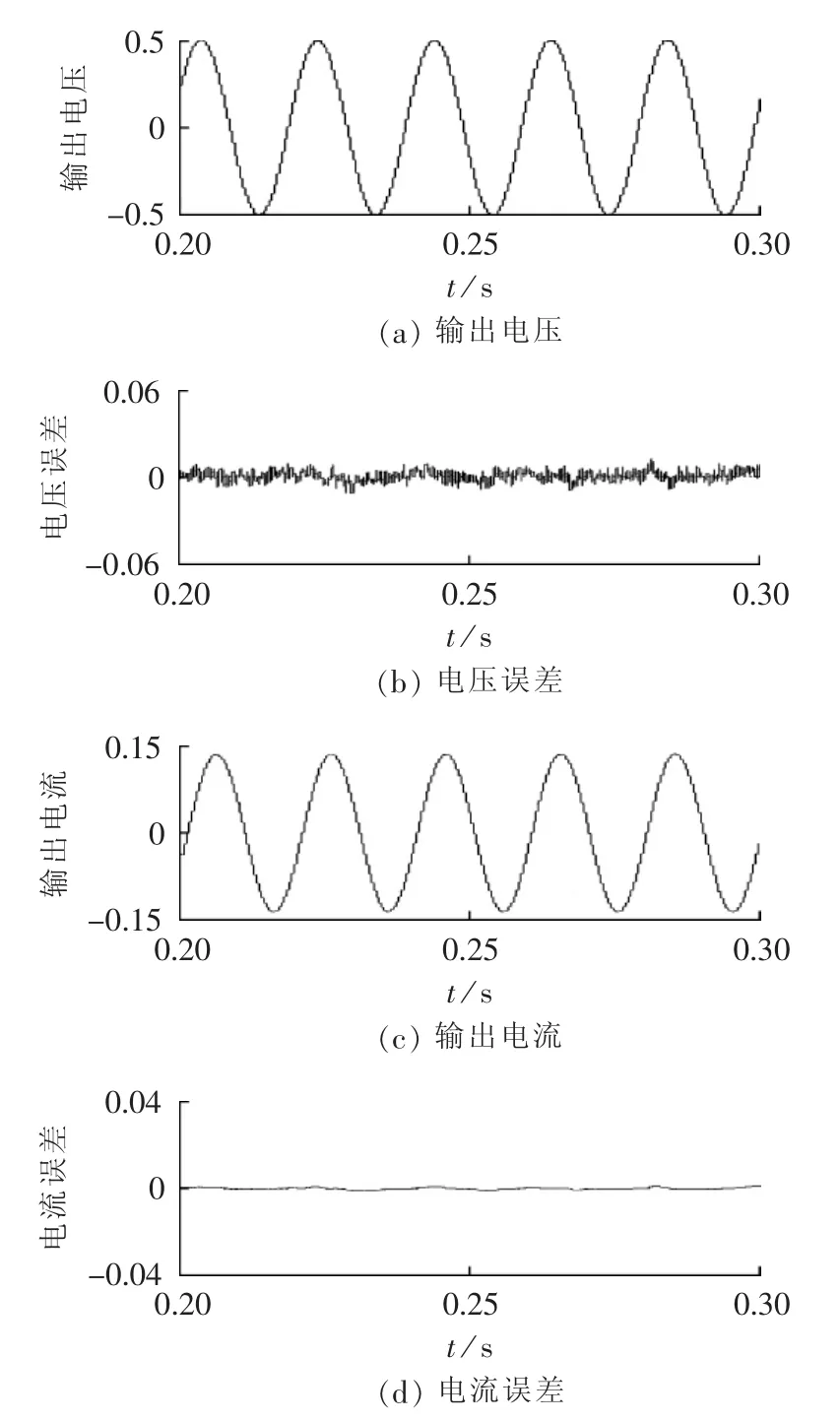
图7 线性电路被测侧输出电压与电流波形与误差Fig.7 Waveforms of output voltage and current at test terminal of linear circuit and corresponding errors

图8 复杂电路被测侧输出电压与电流波形与误差Fig.8 Waveforms of output voltage and current at test terminal of complex circuit and corresponding errors

图9 PHIL仿真示意图Fig.9 Schematic diagram of PHIL simulation
图10(a)为PHIL稳态运行时,被测设备侧接不可控整流非线性负载,输出的电压与电流波形,输出电压谐波畸变率小于3%,可以很好地线性放大RTDS中的采样指令信号,证明了功率接口控制策略的有效性。 图10(b)、(c)为 PHIL试验被测设备侧接线性负载运行,指令电压从380 V(线电压)暂态变化为0 V时,分别加入重复控制、重复控制+P控制后的输出电压波形。由图10(b)可以得出,传统的重复控制由于有一个周期的误差累加过程,使得电压需要一个工频周期的时间达到稳态。图10(c)加入电压前馈P控制后,明显缩短了动态过程时间,很好地保证了仿真的暂态过程。
图11为在RTDS电压源模型中分别叠加基波幅值3.8%的5次、13次和19次电压谐波量,被测设备侧所得到的A相输出电压波形,由图中看出可以很好地输出基波和高次谐波电压,从而证明了本文所提出的功率接口电路设计与控制策略的有效性和正确性。
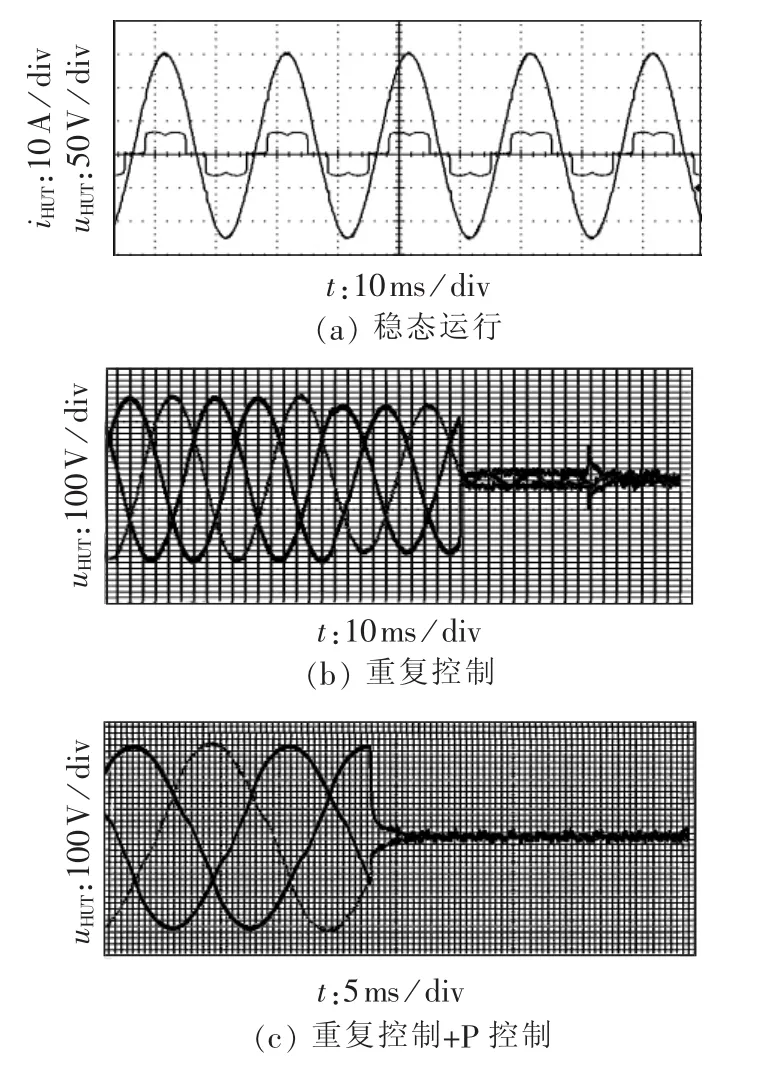
图10 稳态与动态运行Fig.10 Steady-state and dynamic operations

图11 基波与谐波叠加作为指令信号Fig.11 Superimposition of fundamental and harmonic waves as reference voltage
4 结论
本文建立了380 V、50 kW PHIL仿真试验平台,同时通过PHIL数学模型的建立,分析了PHIL系统的稳定性条件;并针对大功率接口装置研究了基于重复控制及电压外环P控制的复合式控制策略,提高动态性能,消除静差,保证仿真精度;通过初步理论推导、仿真、试验及工程应用验证,证明了该功率接口设计的可行性和可靠性。
[1]高源,陈允平,刘会金.电力系统物理与数字联合实时仿真[J].电网技术,2005,29(12):77-80.GAO Yuan,CHEN Yunping,LIU Huijin.Joint physio-digital realtime simulation of power system[J].Power System Technology,2005,29(12):77-80.
[2]REN W.Interfacing issues in real-time digital simulators[J].IEEE Transactions on Power Delivery,2011,26(20):1221-1230.
[3]徐海亮,章玮,胡家兵,等.可编程电网故障模拟电源的设计[J].电工技术学报,2012,27(10):91-97.XU Hailiang,ZHANG Wei,HU Jiabing,etal.Design ofa programmable grid-fault emulating power supply[J].Tansactions of China Electrotechnical Society,2012,27(10):91-97.
[4]STEURER M,EDRINGTON C,SLODERBECK M,etal.A megawatt-scale power hardware-in-the-loop simulation setup for motor drives[J].IEEE Transactions on Industrial Electronics,2010,57(4):1254-1260.
[5]BOUSCAYROL A. Different types of hardware-in-the-loop simulation for electric drives[C]∥IEEE ISIE.Cambridge,UK:[s.n.],2008:2146-2151.
[6]BOUSCAYROL A,GUILLAUD X,TEODORESCU R,et al.Energetic macroscopic representation and inversion-based illustrated on a windenergy-conversion system using hardware-in-the-loop simulation[J].IEEE Transactions on Industrial Electronics,2009,56(12):4826-4835.
[7]李澍森,查晓明,石延辉,等.电能质量设备实验方法及实验平台[J].电力系统自动化,2009,33(24):70-74.LI Shusen,ZHA Xiaoming,SHI Yanhui,et al.Equipment research on a platform and experiments scheme for power quality[J].Automation of Electric Power Systems,2009,33(24):70-74.
[8]SUDHOFF S D,ALT J T,HTGNER H J,et al.Control of a 15-phase induction motor drive systems[C]∥Proceedings of the 1997 Naval Symposium of Electric Machines.Newport,Wales:[s.n.],1997:103-110.
[9]REN W,STEURER M,BALDWIN T L.Improve the stability and the accuracy of power hardware-in-the-loop simulation by selecting appropriate interface algorithms[J].IEEE Transactions on Industry Applications,2008,44(4):1286-1294.
[10]TUCKER J.Power-Hardware-In-the-Loop(PHIL)considerations and implementation methods for electrically coupled systems[D].Columbia,USA:University of South Carolina,2011.
[11]LOH P C,NEWMAN M J,ZMOOD D N,et al.A comparative anlysis of multiloop voltage regulation strategies for single and three-phase UPS systems [J].IEEE Transactions on Power Electronics,2003,18(5):1176-1185.
[12]UFFE B,PRASAD N E,FREDE B.A new space-vector-based control method for UPS systems powering nonlinear and unbalanced loads [J].IEEE Transactions on Industry Applications,2001,37(6):1864-1870.
[13]MATTAVELLI P.An improved deadbeat control for UPS using disturbance observers[J].IEEE Transactions on Industrial Electronics,2005,52(1):206-212.
[14]毕天姝,倪以信,吴复立,等.基于径向基函数神经网络和模糊控制系统的电网故障诊断新方法[J].中国电机工程学报,2005,25(14):12-18.BITianshu,NIYixin,WU Fuli,etal.Hybrid faultsection estimation system with radialbasis function neuralnetwork and fuzzy system[J].Proceedings of the CSEE,2005,25(14):12-18.
[15]滕国飞,肖国春,张志波,等.采用重复控制的LCL型并网逆变器单闭环电流控制[J].中国电机工程学报,2013,33(24):13-21.TENG Guofei,XIAO Guochun,ZHANG Zhibo,et al.A singleloop currentcontrolmethod forLCL-filtered grid-connected inverters based on the repetitive controller[J].Proceedings of the CSEE,2013,33(24):13-21.
[16]WU X,LENTIJO S,MONTI A.A novel interface for powerhard ware-in-the-loop simulation[C]∥IEEE Workshop Comput Power Electron.[S.l.]:IEEE,2004:178-182.
[17]REN W,STEURER M,BALDWIN T L.An effective method for evaluating the accuracy of power hardware-in-the loop simulations[J].IEEE Transactions on Industry Applications,2009,45(4):1484-1490.
[18]吕志民,周茂林.使用Pade近似式处理数字控制系统中的纯滞后[J].中山大学学报(自然科学版),2001,40(1):114-115.LÜ Zhimin,ZHOU Maolin.Manipulation of the pure time delay in digitalcontrolsystem applying Pade approximation [J].Journal of Sun Yatsen University (Natural Science),2001,40(1):114-115.
[19]刘春喜,马伟明,孙驰.大容量400 Hz逆变器输出LC滤波器设计和低次谐波抑制[J].电工技术学报,2011,26(6):129-136.LIU Chunxi,MA Weiming,SUN Chi.Design of output LC filter and low order harmonics suppression in high power 400 Hz inverter[J].Transactions of China Electrotechnical Society,2011,26(6):129-136.
[20]王跃,杨昆,陈国柱.级联DSTATCOM补偿不平衡负载分相控制策略[J].电力自动化设备,2015,35(5):23-28.WANG Yue,YANG Kun,CHEN Guozhu.Individualphase control of cascaded DSTATCOM for unbalanced load compensation[J].Electric Power Automation Equipment,2015,35(5):23-28.
[21]冯兴田,张丽霞,康忠健.基于超级电容器储能的UPQC工作条件及控制策略[J].电力自动化设备,2014,34(4):84-89.FENG Xingtian,ZHANG Lixia,KANG Zhongjian. Working conditions and control strategy of UPQC based on supercapacitor energy storage[J].Electric Power Automation Equipment,2014,34(4):84-89.
[22]刘飞,宫金武,查晓明.一种复合式重复控制在并联型有源电力滤波器设计中的应用[J].电工技术学报,2012,27(12):138-145.LIU Fei,GONG Jinwu,ZHA Xiaoming.Application of compound repetitive control in shunt active power filter[J].Tansactions of China Electrotechnical Society,2012,27(12):138-145.