碟式太阳能光热发电系统机架结构风振响应的时域分析
2016-05-20彭佑多易陈斐
颜 健, 彭佑多, 易陈斐
(湖南科技大学 机械设备健康维护省重点实验室,湖南 湘潭 411201)
碟式太阳能光热发电系统机架结构风振响应的时域分析
颜健, 彭佑多, 易陈斐
(湖南科技大学 机械设备健康维护省重点实验室,湖南湘潭411201)
摘要:针对大型碟式光热系统抗风运行的机架风致振动问题,以研制的25 kW级碟式机架为对象,阐述了复杂机架结构的有限元建模方法,并通过静力承载和机构传动角的分析,指出了高度角驱动机构的不足并予以改进,进而对比分析了改进前后机架多高度角工况的自振特性;基于线性滤波AR法模拟得到25组工况的脉动风载荷(平均风速16.0 m/s),开展了改进机架的风振时域求解。分析了机架关键节点的位移响应均方根和峰值分布特征,并对典型工况的机架位移响应进行频谱分析,给出了各工况机架关键节点的位移风振系数,为机架结构设计提供参考。结果表明,机架结构位移响应是以脉动载荷的强迫振动为主,并伴有多阶振型参与的共振响应;机架控制点的位移峰值和位移均方根的分布特征相似,且沿焦轴的响应分量均占主导地位,机架振动主要为机架视日部分绕高度角轴线的旋转运动。
关键词:碟式光热发电;机架结构;脉动风场模拟;风振响应;时域分析;机构传动角
太阳光能的有效聚集与接收是碟式光热发电的关键,而机架结构是实现聚光器反射镜面型几何“保型”的载体,也是实现聚光器和热接收器空间位置保持的载体,其结构的有效性直接影响着碟式系统发电效率或能否正常运行。然而,机架工作于露天环境,并具有迎风尺度大且透风性差,且要满足在16 m/s风速内进行有效聚光运行(即抗风运行)。当脉动风载荷作用时可能引起位移响应过大,将导致聚光性能下降或更为严重的停机情况,尤其在大功率级碟式系统中更为明显。因此,开展大型碟式机架结构的风振响应研究是有必要的,这不仅是对机架抗风性能的进一步剖析与评价,也是后续系统抗风运行时聚光性能评价的重要依据。
许多学者对碟式光热发电系统开展相关研究并研制了样机,中科院电工所[1]和哈尔滨工业大学[2]均研制了由多圆形反射镜构成的碟式光热发电系统。Lovegrove K等研制了接收面积为500 m2的抛物型聚光器[3]。厉剑梁等对碟式机架开展了典型工况的静承载分析[4]。何轶等人针对25 kW聚光器开展了多工况的静承载研究,分析了在极限大风作用的安全性[5]。在工程应用中,我国也建立了100 kW级碟式光热示范电站(单机功率10 kW),但相对国外而言仍处于起步阶段。已有公开文献中,更多倾向于系统聚光或光热转换等理论或方法的研究,而对碟式机架的风振响应研究很少见。虽课题组已成功研制了25 kW碟式样机,但开展机架风振响应的现场实测仍存在诸多困难,尤其是难以捕捉合适的承载环境。然而,采用有限元和脉动风场数值模拟相结合的时域风振响应方法能克服上述困难,且已在风振工程中得到广泛应用[6-9]。王莺歌等采用时域法对塔式定日镜进行风振响应研究,得到了多工况下各关键节点的位移风振系数,为定日镜抗风设计提供依据。Zang等[10]对塔式定日镜结构开展了关键部件现场应力实测和整机结构的时域风振响应分析。章子华等[11]将模拟生成的脉动风载荷加载到风机塔架有限元模型进行时域风振响应分析。
以25 kW级碟式光热发电系统为对象,建立其机架结构的有限元模型,并通过整机静承载和机构传动角分析,指出高度角驱动机构设计的不足并予以改进,对比改进前后机架多高度角工位的自振特性。基于线性滤波法模拟脉动风载荷,开展机架典型工况的风振响应研究,着重分析机架关键节点的位移响应统计特征,并探讨机架风振响应中振型参与和贡献的问题,最后给出机架关键节点的位移风振系数,以供抗风设计参考。
1机架有限元模型及自振特性分析
碟式机架结构复杂,常规有限元建模将导致节点、单元数量显著,使风振时域分析计算量巨大且对硬件要求较高。因此,在结构承载和传力特性一致的基础上,对机架进行合理有效的简化。
1.1机架结构有限元建模
碟式太阳能光热发电系统机架结构组成见图1(a),其中聚光器、支撑桁架和斯特林热机(尚未安装)等构成视日跟踪部分(简称视日结构),并由图1(b)所示的双轴驱动机构进行整体承载与视日跟踪功能的实现。基于25 kW功率要求,聚光器采光口直径为12.7 m、焦半径f=7.25 m。聚光器桁架采用beam188梁单元,镜面单元(这里为厚15 mm的铝蜂窝基体)采用shell63壳单元,镜面单元固定螺栓采用beam188单元模拟且以共节点方式传递载荷。聚光器与支撑桁架以图1(c)所示的U型体为中间载体过渡连接,建模中U型体采用shell63壳单元,聚光器桁架与U形体通过MPC184刚性梁单元模拟真实的多螺栓固定连接,而支撑桁架是通过端面板与U型体采用多螺栓连接的,建模时采用面—面接触的多点MPC技术模拟固定连接。支撑桁架采用beam188梁单元模拟,效果见图1(e)所示。其中上下弦杆和前段腹杆截面均为100 mm×100 mm的矩形管,厚度分别为14 mm和8 mm,后段腹杆为截面100 mm×100 mm×6 mm的角钢。图1(b)的立柱及顶部支座采用shell63和solid45混合建模(见图1(d)),并通过与sold45全实体单元模型进行承载对比,验证了混合建模的有效性。立柱高度为7.0 m、外径为625 mm、壁厚为20 mm,立柱顶部支座与支撑桁架采用CP耦合来实现铰接的模拟。
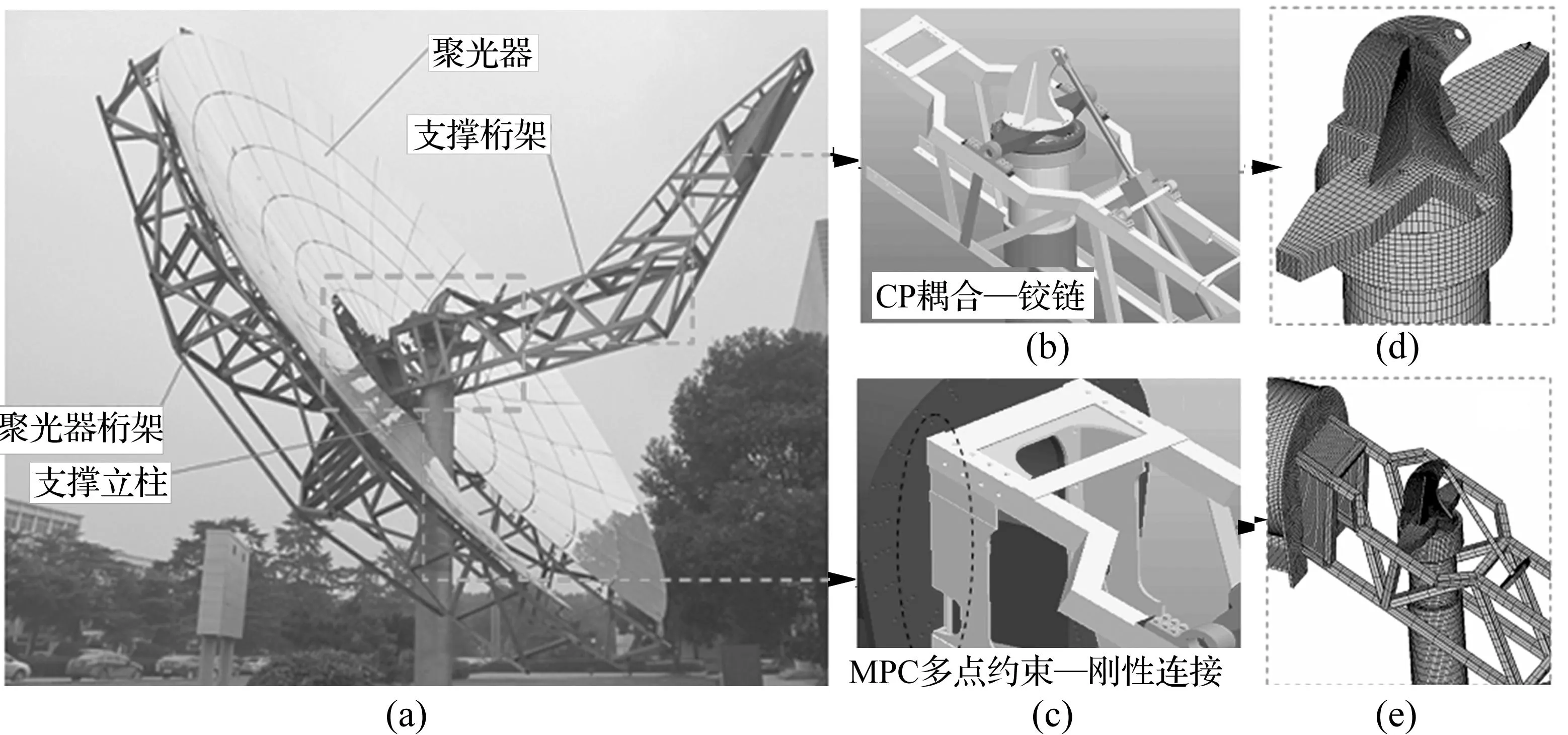
图1 碟式机架(25 kW)及建模简化Fig.1 Dish rack (25 kW) and the simplified modeling
将上述部件模型组装得到机架整体有限元模型(见图2)。其中高度角驱动丝杆采用beam188梁单元,斯特林热机质量为600 kg,以mass21质量单元模拟。通过将立柱旋转来建立不同高度角的机架模型,保持聚光器与整体坐标系XYZ的相对关系不变(有限元模型的坐标系在U型体底部中心位置),即X轴指向聚光器焦点方向,便于后续位移响应的数据处理。整机有限元模型共有单元约5.1万和节点约3.5万,材料属性定义:镜面单元密度为350 kg/m3,弹性模量为4.5×1010N/m2(铝蜂窝基体);其他材料均为钢材其密度为7 850 kg/m3,弹性模量为2.06×1011N/m2。
文中将针对高度角β=0°、30°、45°、60°、90°与风向角φ= 0°、45°、90°、120°、180°的5×5=25组典型工况开展机架风振响应研究,其中高度角β=90°时聚光器开口朝天,风向角的定义见图2。为了便于表述,工况组合采用高度角-风向角的命名方式,同时为便于位移结果的处理与表达,在图中标记了A1~A12和B~D共15个位置做为机架承载的位移控制节点,其中A1~A12在聚光器辐射梁端点,B在斯特林热机安装位置,C在立柱顶端位置,D在U型体上部的中心位置。
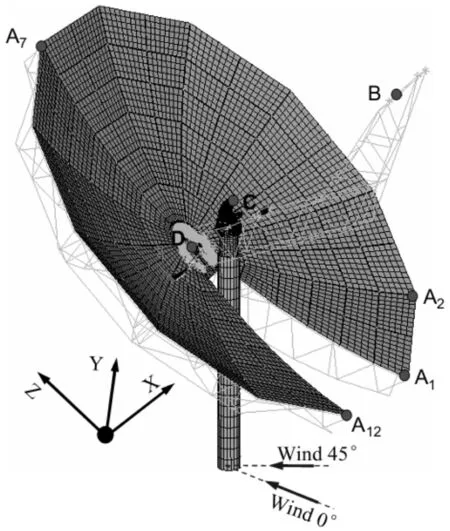
图2 机架整体有限元模型(45°高度角模型)Fig.2 The whole finite element model of the frame(45° elevation angle model)
通过机架静力学分析表明,机架结构90°高度角时承载性能不甚理想,其90°~0°工况在12 m/s的平均风载荷作用下(其分区体型系数分布详见文献[12])的承载位移峰值达到100.52 mm,发生在斯特林热机安装位置B点,且整机承载位移表现为绕高度角跟踪轴的转角位移。图3(a)给出了90°高度角位置的驱动机构受力分析图,机架的风载及自重载荷引起的转矩MY是由丝杆轴力来抵抗的,可以看出丝杆BC的作用力与支撑桁架AC的夹角是非常小的,此工况高度角驱动机构的传动角设计是存在不足。因此,对丝杆驱动机构的安装位置进行了改进(BC2为丝杆),得到如图3(b)所示的有限元模型。机构改进模型90°~0°工况在12 m/s平均风载荷作用的位移峰值为31.46 mm,明显改善了承载性能,这说明高度角机构传动角的合理设计对机架整体承载性能的提升是至关重要的。
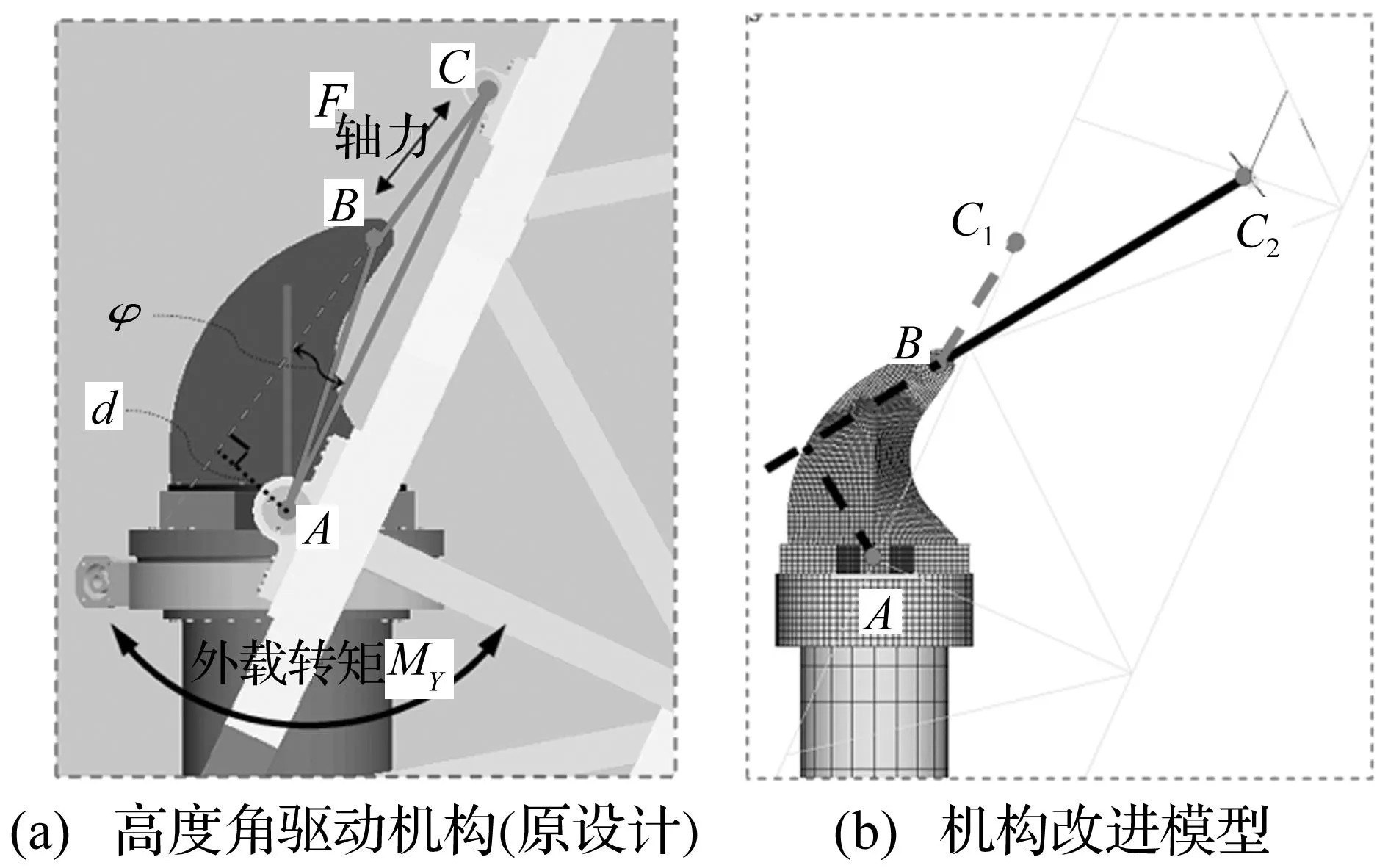
图3 机架90°高度角的机构传力图Fig.3 Force diagram of the frame of 90° elevation angle
1.2自振频率及振型分析
机架结构自振频率和振型是固有动力学特性的表征,也是机架结构风振响应结果分析的基础。表1和表2分别给出了原模型(模型1)和机构改进模型(模型2)的前六阶自振频率。
由表1可知,由于高度角机构的变位将引起机架整体质量和刚度的改变,导致不同高度角模型相应阶次的自振频率存在一定差异。但就整体而言,除90°高度角模型的1阶频率为0.497 Hz外,其他相应阶次频率相差均不明显,且前六阶频率均处在1.051~4.818 Hz范围内。由表2可知,除90°高度角的1阶频率由0.497 Hz提升至1.060 Hz外,其余各高度角模型的自振频率与表1基本一致。
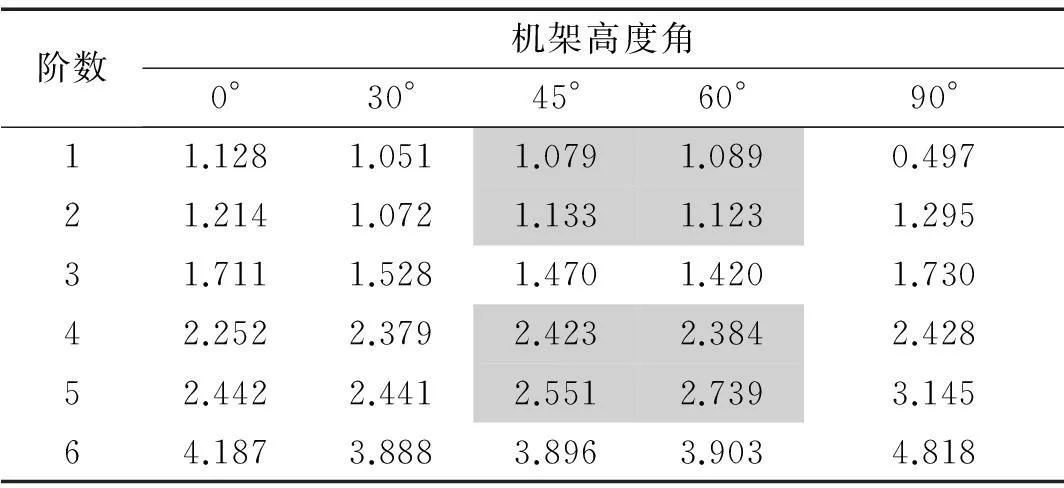
表1 机架不同高度角的自振频率-模型1
图4为模型1的0°高度角工况前六阶振型,图5为模型1的90°高度角工况4~6阶振型。

表2 机架不同高度角的自振频率-模型2
(1) 由图4可知,机架0°高度角模型的前3阶振型主要表现为视日结构的绕轴旋转振动形态,第1阶为绕高度角旋转轴的旋转运动,第2阶为绕机架X轴的旋转运动,第3阶为绕Z轴的旋转运动,而4阶~6阶振型主要为立柱弯曲和视日结构旋转的耦合振动。
(2) 模型1其他高度角工况的振动形态基本包含在图4(a)~图4(f)中,30°高度角与0°高度角的各阶振动形态分布一致,而45°和60°高度角的1阶(振型为图4(b)形式)和2阶(见图4(a))以及4阶(见图4(e))和5阶振动形态是与0°高度角恰好相反。这从自振频率表1可知,具有图4(b)振型的频率在1.07 Hz左右,具有图4(e)振型的频率在2.42 Hz左右。
(3) 机架90°高度角前3阶振型与0°高度角是一致的,但4阶~6阶振型是存在一定差异的,具体(见图5),主要表现为立柱的弯曲和热机安装座位置的振动,也有伴随聚光器结构的振动。
(4) 对于机构改进的模型2,除机架30°高度角的1阶和2阶出现提前互换振型情况外,其他的振型与模型1是一致的。

图4 机架0°高度角的振型图(模型1)Fig.4 Vibration diagram of 0° elevation angle of frame (model 1)
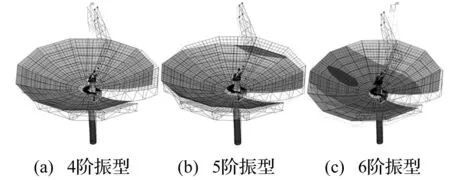
图5 机架90°高度角的部分振型图(模型1)Fig.5 Section vibration diagram of 90° elevation angle of frame (model 1)
2脉动风速时程模拟
脉动风速可用零均值的高斯平稳随机过程来模拟,且具有很明显的各态经历性[13]。数值模拟中线性滤波法(Auto Regressive method,AR)是利用前数个时刻的脉动量来线性回归产生下一时刻脉动量,是考虑一定时间相关性的。而碟式机架空间三方向尺度相当,风流经时往往存在明显的时间和空间相关性,因此AR法是能有效反映机架风场时空效应的。机架承受的风载荷有顺风向的平均风、脉动风以及横风向的尾流旋涡干扰等,但文中仅对占主导地位的顺风向风载荷引起的机架振动开展研究,且不考虑机架与风场之间的耦合效应,也不考虑电站机架群体的风场干扰效应。
2.1脉动风场功率谱
脉动风速功率谱密度函数是描述脉动风速在不同频率段能量强度的,对于顺风向可以采用Kaimal谱,其表达式为[14]:
(1)

自然风场对结构的脉动作用是存在时间和空间相干性的,且是以计算节点空间距离为变量的函数。机架处于不同工况(高度角-风向角)时,其风场模拟点的空间位置是变化的。为了使风速时程更好符合工况特征,在图6所示的O1-X2Y2Z2风轴系中进行空间各点的风速时程模拟,其中坐标系O-XYZ为聚光器结构的随动坐标系(体轴坐标系),O-X1Y1Z1为空间整体坐标系,坐标原点O距地面7.0 m。由图6可得风场模拟点在任意工况的空间坐标为:

(2)

图6 风场模拟点的空间位置关系Fig.6 Spatial relationship of simulation points of wind field
采用Davenport建议的频域相干系数公式并扩展至三维情况,根据图6风轴坐标系得到相干函数为:
Cohij(ω)=
(3)

忽略互功率谱中包含的相位信息,则任意i,j两点的互功率谱函数为:
(4)
根据式(4)可得到M个模拟点风速时程的互功率谱密度矩阵Su(ω)。
2.2脉动风速时程及检验
文献[12]研究表明25 kW碟式机架主要承风结构是聚光器反射镜面,因此取图6中体轴系的四象限区域中心点进行各工况的风场模拟,对应0°~0°工况体轴系坐标分别为:a1(0.7,-3.18,3.18)、a2(0.7,3.18,3.18)、a3(0.7,-3.18,-3.18)、a4(0.7,3.18,-3.18)。风速时程模拟参数设置:地貌类别为B类,地面粗糙度z0=0.03,截止频率上限ωu=6π,频率采样点数为210,自回归阶数p=4,时间步长取Δt=0.1 s,模拟总时间为T=100 s,根据碟式发电系统实际聚光运行的抗风要求,文中取10 m高度的平均风速为16.0 m/s。
参考文献[9]的AR模型并结合式(1)~式(4)的功率谱矩阵编制Matlab程序,模拟得到25组工况的风速时程。限于篇幅,仅给出部分工况的脉动风速时程及功率谱检验(见图7~图8)。
由图7可知,模拟点a1和a2的风速时程具有一定的相似性,是由于聚光器结构的空间尺度相对较小,也说明采用四个点来模拟风场是有效的。从图8可知,a1点的风速自功率谱与目标谱吻合较好,说明了模拟方法的正确性和风速时程数据的可靠性。

图7 工况0°~0°的脉动风速时程Fig.7 Condition of 0°~0° of fluctuating wind speed time history
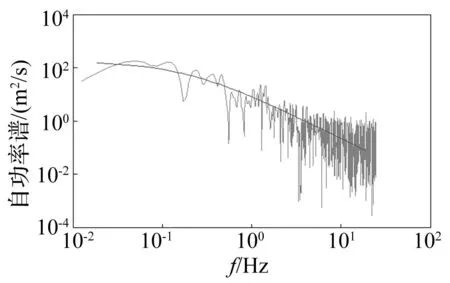
图8 工况0°~0°的a1点脉动风速功率谱检验Fig.8 Condition of 0°~0° of a1 point fluctuating wind power spectrum inspection
3机架风振响应分析
机架结构是以聚光器镜面几何“保型”、聚光器镜面同热机接收器的空间相对位置保持为最终目标性能的。因此,对机架结构抗风运行的位移响应分析是重点,这也是评价发电系统抗风运行效能以及机架结构设计合理与否的重要依据。
3.1机架风振时域求解
机架有限元多自由度结构在风载荷作用下的振动方程为:

(5)
由于黏滞阻尼理论把阻尼系数理解为结构实测结果的值,能够较大程度的符合结构振动规律,式为:
(6)
式中:ωi和ωj分别为第i和j阶模态对应的圆频率;ξi和ξj为第i和j阶模态的阻尼比,通常认为结构阻尼比在一定的自振频率范围内为定值,而载荷规范对黏滞阻尼中的阻尼比也作出了明确规定,对钢结构取0.01。
3.2位移响应分析
机架承受的风载荷主要聚集于聚光器反射镜面,并且气动中心往往偏离双轴支撑中心,导致机架视日部分产生绕轴旋转位移,同时入流风场的时空效应也会加剧这种偏载效应。再者某些工况的水平风载荷显著将使立柱产生弯曲变形,这也将导致安装在立柱顶部的视日结构产生较大的牵引位移,具体表现为整机结构绕立柱地基的转角位移。机架承载位移形式除上述绕轴旋转位移和牵引位移两种外,还存在承载引起的局部变形。限于篇幅,文中只对各控制点的整体位移响应以及影响聚光性能显著的X轴分量位移展开分析,整体位移响应是将各轴分量位移合成得到。为了作图方便,将控制点A1~A12对应编号为1~12、B~D对应编号13~15。
机架位移响应的峰值是碟式发电系统聚光性能评价的重要输入源数据,也是表征结构承载能力的指标,由下式计算:
(7)
图9给出了部分工况机架控制点的位移均方根分布曲线。

图9 机架控制点的位移均方根Fig.9The root mean square displacement of frame control points
由图9可知,机架高度角为0°和30°的RMS-Total曲线具有相同的分布趋势,且最大值是随机架高度角的增加而减小的。同时对比图9(a)、图9(c)以及图9(b)、图9(d)可知,RMS-X和RMS-Total曲线变化趋势及分布特征存在明显的相似性,这说明机架风振响应中X轴振动分量是占主导地位的。从RMS曲线的极值分布来看,极大值集中在聚光器底部(A1和A12)、聚光器顶部(A6和A7)以及热机安装位置B点,极小值则集中在聚光器左右控制点(A3和A10)位置。其中以聚光器顶部(A6和A7)位置脉动最为强烈。
图10为机架控制点的整体位移峰值和部分工况X轴位移峰值分量的分布曲线。
(1) 由图10(a)~图10(d)可知,机架处于不同高度角时,风向角0°、45°和180°作用的位移响应是占主导的,且极大值随高度角的增大而减小。也可以看出RMS-Total和Umax-Total分布曲线存在明显的相似性,具有相同的极值分布特征,结合位移峰值式(7)可以推断,机架控制点的平均位移响应也呈现相同的分布及变化趋势,这在图(12)的位移风振系数分布中也得到了体现,即位移均值与位移均方根存在相关性而使风振系数分布较为均匀。
(2) 风向角一定时,机架处于不同高度角的X向位移峰值分布趋势是一致的,因此仅给出了0°和30°高度角的Umax-X。由图10(e)~图10(f)可知0°和45°风向作用的机架位移峰值分布趋势基本一致,但后者较前者响应强烈。而0°和180°风向作用的位移峰值在图中呈现对称性,且0°风向较180°风向作用强烈。由图图10(a)和图图10(e)以及图图10(b)和图图10(f)的对比可知,机架位移响应峰值中X轴分量占主导地位,结合整体位移峰值的极值分布特征可以推断,机架风振响应主要表现为视日结构绕高度角轴线的旋转运动形式,这在后续的频谱分析中也将得到证实。

图10 机架控制点的位移峰值Fig.10 The peak value of displacement of frame control points
由于未考虑电站多机架群体风场干扰,而前期的双机架风场干扰研究表明,机架群体主要以遮挡效应为主的载荷减弱干扰形式,这有利于机架抗风效应。因此,文中给出的位移峰值是偏保守的。
3.3位移时程谱分析
The power efficiency of semiconductor laser ηc is expressed as the ratio of output optical power and input electric power,
机架高度角变化不仅导致结构固有动力特性的改变,同时也改变各风向来流激励的分布和大小。因此,研究机架各阶振型在风振响应中的参与程度,必须结合工况进行分析。图11为部分工况的控制点A7和控制点B整体位移响应的频谱图(半对数坐标)。从图11可知,机架位移响应是以脉动风场的强迫振动为主导,并伴随着结构多阶振型参与的共振响应,且某些工况的共振能量不容小视。除强迫振动外:

图11 位移时程频谱分析Fig.11 Spectrum analysis of the frame control points displacement time history
(1) 在0°~0°工况,机架控制点A7和控制点B的位移响应频谱峰值均在1.055 Hz和2.109 Hz,接近机架0°高度角的基频1.049 Hz和4阶频率2.247 Hz,且前者振动更强烈。而90°~0°工况的频谱峰值发生在1.074 Hz接近该机架工位的基频1.060 Hz,这说明了上述两种工况均激发了以绕高度角轴线旋转运动的基频振型,并产生了能量可观的共振响应,值得注意。
(2) 在45°~120°工况,由于风场入流与聚光器镜面存在夹角以及载荷的时空效应,使得机架载荷分布明显不均而导致绕Z轴的旋转运动。此工况控制点A7频谱峰值为1.074 Hz,而控制点B峰值发生在1.191 Hz和1.465 Hz,且共振能量均是依次减弱的,而机架45°高度角的前3阶的峰值依次为1.080 Hz、1.182 Hz和1.461 Hz,表现出有高频振型的参与,但从共振能量看仍不够强烈的。在45°~180°工况由于风载荷分布均匀性得到改善,未出现基频振型参与,而直接激发了以绕高度角轴旋转的二阶振型,这也是载荷激励方向对振型参与影响的体现。
总的来讲,由于风载荷是始终作用于聚光器反射镜表面,而使得承载位移主要表现为绕高度角轴的旋转运动形式,这在位移峰值分布中也可以看出。当然也会由于风载激励方向的改变而激发其他高频振型的参与,但共振能量仍处于次要地位的。
3.4位移风振系数分析
工程抗风设计常采用静力风载荷乘以风振系数的方式来考虑风的动力效应,其中位移风振系数分布较稳定。由碟式机架风振响应结果获得控制点的位移风振系数,其表达式为:
(8)
图12给出了各工况机架控制点的位移风振系数,整体来看各工况控制点的位移风振系数分布较为均匀且未出现奇异点,但随机架高度角和风向角的不同而存在差异,单工况的数据分布在0.5范围内波动。具体抗风计算和位移响应求解可根据需要选取。
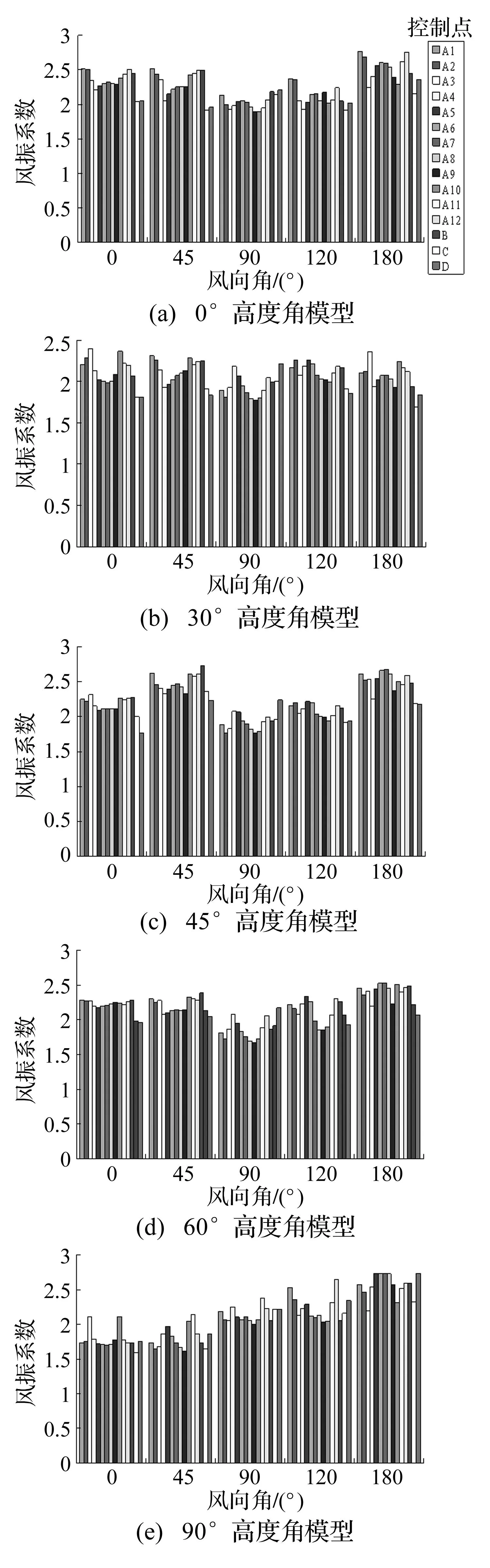
图12 机架的位移风振系数Fig.12 The frame of the wind vibration coefficient of displacement
4结论
(2) 机架控制点的位移峰值和位移均方根值的分布曲线相似,且具有相同的极值分布特征。当风向角为0°、45°和180°作用时,机架位移响应最强烈,其中以沿焦轴(X轴)分量响应占主导地位,且位移峰值的极大值随机架高度角的增大而减小。机架风振响应主要表现为视日结构绕高度角轴线的旋转运动形式。
(3) 机架位移响应以脉动载荷的强迫振动为主,并伴随着多阶振型参与的共振响应。机架高度角和风载激励方向对振型的参与贡献有影响,但风载始终作用于反射镜表面,使视日结构绕高度角轴旋转的振型贡献最为凸出。
(4) 机架各工况的位移风振系数存在差异,文中给出了详细的分布数值,在抗风设计和聚光性能评价时选取。另外需要指出,碟式机架的高度角驱动机构对整体承载性能的提升是至关重要的,研究新的高刚性双轴跟踪机构是重点。
[ 1 ] 杨敏林,杨晓西,林汝谋,等. 太阳能热发电技术与系统[J]. 热能动力工程,2008,23(3):221-228.
YANG Min-lin, YANG Xiao-xi, LI Ru-mou, et al. Solar energy-based thermal power generation technologies and their systems[J], Journal of Engineering for Thermal Energy and Power, 2008,23(3):221-228.
[ 2 ] 夏新林,戴贵龙,孙创. 多碟聚集器聚集太阳能热流分布特性研究[J].太阳能学报, 2012,33(9):1524-1528.
XIA Xin-lin, DAI Gui-long, SUN Chuang. Numerical simulation on concentrating solar characteristic of multi-dish collector[J], Acta Energiae Solaris Sinica, 2012,33(9):1524-1528.
[ 3 ] Lovegrove K, Burgess G, Pye J. A new 500 m2paraboloidal dish solar concentrator[J].Sol. Eng. 2011,85:620-626.
[ 4 ] 历剑梁,兰维,吕渤林. 碟式斯特林太阳能热发电系统结构仿真研究[J].华电技术, 2012,34(7):68-71.
LI Jian-liang, LAN Wei, LÜ Bo-lin. Simulation and study on structure of dish stirling solar thermal power generating system[J], Huadin Technology, 2012,34(7):68-71.
[ 5 ] 何轶,彭佑多,龙东平,等. 大型碟式光热太阳能聚光器结构风荷分析[J]. 机械设计与制造,2014,(3):259-261.
HE Yi, PENG You-duo, LONG Dong-ping, et al. Wind load analysis of the large dish condenser for solar power concentrator[J], Machinery Design & Manufacture,2014,(3):259-261.
[ 6 ] 甘进,洪灶明,吴卫国. 脉动风作用下高耸塔结构风振响应研究[J].华中科技大学学报:城市科学版,2009,26(2):76-79.
GAN Jin, HONG Zao-ming, WU Wei-guo. Wind-induced response of high-rise tower sturcture with fluctuating wind load[J].Journal of Huazhong University of Science and Technology:Urban science Edition,2009,26(2):76-79.
[ 7 ] 李锦华,李春祥. 土木工程随机风场数值模拟研究的进展[J]. 振动与冲击,2008,27(9):116-187.
LI Jin-hua, LI Chun-xiang.Development of numerical simulations for stochastic wind fields in civil engineering[J]. Journal of Vibration and Shock, 2008,27(9):116-187.
[ 8 ] 王莺歌,李正农,宫博,等. 定日镜结构风振响应的时域分析[J].振动工程学报,2008,21(5):458-464.
WANG Ying-ge,LI Zheng-nong,GONG Bo,et al.Time-domain analysis on wind-induced dynamic response of heliostat[J].Journal of Vibration Engineering,2008,21(5):458-464.
[ 9 ] 鲍侃袁,沈国辉,孙柄楠. 双曲冷却塔的脉动风载荷模拟和风致响应[J]. 浙江大学学报:工学版,2010, 44(5):955-961.
BAO Kan-yuan, SHEN Guo-hui, SUN Bing-nan. Numerical simulation of fluctuating wind load and wind-induced response of large hyperbolic cooling tower[J]. Journal of Zhejiang University:Engineering Science,2010, 44(5):955-961.
[10] Zang Chun-cheng, Wang Zhi-feng, Liu Hong, et al. Experimental wind load model for heliostats[J], Applied Energy, 2012,93:444-448.
[11] 章子华,王振宇,刘国华. 风电场脉动风模拟及风机塔架动力响应研究[J].太阳能学报,2011,32(7): 992-998.
ZHANG Zi-hua, WANG Zhen-yu, LIU Guo-hua. Simulation of fluctuating wind in wind farm and dynamic response of wind turbine tower[J].Acta Energiae Solars Sinica,2011,32(7):992-998.
[12] 颜健,彭佑多,龙东平,等. 大型碟式太阳能钢构机架平均风荷载及绕流特性研究[J]. 振动与冲击,2014,33(24):8-16.
YAN Jian, PENG You-duo, LONG Dong-ping, et al. Average wind load and flow around characteristics of Streel frame of a large solar energy dish[J]. Journal of Vibration and Shock, 2014,33(24):8-16.
[13] 汪旭,黄鹏,顾明. 上海地区近地台风实测分析[J]. 振动与冲击,2012,31(20):84-89.
WANG Xu, HUANG Peng, GU Ming. Field measurement of typhoon characteristics near ground in Shanghai district[J].Journal of Vibration and Shock,2012,31(20):84-89.
[14] 黄本才. 结构抗风分析原理及应用[M]. 上海:同济大学出版社,2001.
Time-domain analysis for wind-induced response of a dish solar thermal power generation system’s frame structure
YANJian,PENGYou-duo,YIChen-fei(Hunan Provincial Key Laboratory of Health Maintenance for Mechanical Equipment, Hunan University of Science & Technology, Xiangtan 411201, China)
Abstract:Aiming at wind-induced vibration problems of a large dish rack thermal systems frame structure,taking a developed 25KW disk rack as a study research object, the finite element modeling method of a complex frame structure was presented. Through analyzing static load and frame transmission angle, the elevation angle driving mechanism deficiencies were pointed out and improved. Then, the vibration characteristics of the frame under conditions of multi-elevation angle before and after improvement were analyzed comparatively. Based on the linear filtering method of AR, 25 groups of conditions of fluctuating wind loads (average wind speed 16.0 m/s) were obtained. The wind vibration time domain solution of the improved frame was deduced. The key nodes’ RMS displacement responses and peak distribution of the frame were analyzed. The spectral analysis was done for the frame’s displacement responses under typical working conditions. The displacement wind vibration coefficients of the frame’s key nodes under various operating conditions were derived, to provide a reference for the fram’s structural design. The results showed that the displacement responses of the frame structure are mainly the forced vibration to pulsating load with resonant responses of multi-mode participation; the peak displacement features and the root-mean-square distribution ones of the rack control point are similar, and the response components along the focal axis are dominant, the vibration of the frame is mainly the rotating motion of the sunward parts of the frame around the axis of elevation angle.
Key words:dish solar thermal power generation; frame structure; fluctuating wind field simulation; wind-induced vibration response; time domain analysis; transmission angle of frame
中图分类号:TH113.1;TK513
文献标志码:A
DOI:10.13465/j.cnki.jvs.2016.07.027
通信作者彭佑多 男,博士,教授,博士生导师,1964年生
收稿日期:2014-10-08修改稿收到日期:2014-12-12
基金项目:国家自然科学基金(51275166);湖南省省市联合基金资助(11JJ8006);湖南省战略性新型产业重大科技攻关项目(2011GK4058);湖南科技大学研究生创新基金项目(S130019;S140018)
第一作者 颜健 男,博士生,1988年生
