电动地毯织枪机构分析
2016-05-17钱志鹏
钱志鹏, 孟 婥, 左 硕, 罗 娟
(东华大学 机械工程学院, 上海 201620)
电动地毯织枪机构分析
钱志鹏, 孟 婥, 左 硕, 罗 娟
(东华大学 机械工程学院, 上海 201620)
为掌握电动地毯织枪的使用方法和调试方式,提高织枪的织造质量,以常规电动地毯织枪为研究对象,研究了织枪机械结构特点和工作原理,根据建立的数学模型用MatLab-SIMULINK对织枪的主要运动机构双曲柄滑块机构进行运动学仿真和时序分析,明确了解针刀的配合要求,获得了机构的运动规律。结果表明,压布板在钢针尖和剪刀尖运动曲线交叉点位置之下,可以满足织枪的工作要求。依据运动学方程得出不同绒高对应的可调节杆长最优值,并得出可调节杆长的调节趋势,所得的理论数据可用于对织枪进行辅助调试,减少了调试时间。
电动地毯织枪; 机构; 双曲柄滑块机构; 钢针
经过数百年的发展[1],地毯织造的生产方式、产业结构、外观质量等产生了质的飞跃[2-3]。但机制地毯仍不能完全取代手工地毯,特别是手工工艺毯。由于纯手工织造效率低,与市场需求形成矛盾,电动地毯织枪的出现是手工织造技术的变革,提高了手工织造的生产效率和织造质量。电动地毯织枪织造地毯图案的大小不受织机限制[4]。目前手工地毯制品主要来自中国和印度[5]。一直以来簇绒技术都被少数发达国家的厂商所垄断[6],国内的研究大多集中在大型簇绒装备上[7-9],仅有周虎等[10]针对地毯织枪进行了研究。因此,研究电动地毯织枪的织造原理,并进行机构分析具有现实意义。本文以某电动地毯织枪为对象,通过对其有关参数与特性的相关性分析研究,确定合理的设计参数,使电动地毯织枪工作的稳定性提高。
1 织枪机构的工作原理
织枪结构如图1所示。机构由电动机驱动,经过二级齿轮降速后带动2个曲柄滑块机构运动,使钢针和剪刀交替刺入底布实现簇绒。
织枪工作过程如下:
1)在电动机的驱动下,钢针先扎入底布,当钢针开始返回时,剪刀则向前移动,此时剪刀处于开剪状态。
2)当剪刀移过钢针孔时,夹住纱线,剪刀沿着钢针刺穿的孔继续前移通过底布,并将纱线穿入底布;而钢针则刚好退出底布,底布上的孔自然回缩。
3)剪刀向后移动,当活动剪刀片接触到闭剪装置时,剪刀闭合剪断纱线;剪刀继续后移直至脱离底布,形成的2个绒头被夹在底布上逐渐回缩的针孔中。
4)在闭合的剪刀尚未完全退出底布时,钢针开始第2次扎入底布,剪刀继续后退至活动剪刀片接触到开剪装置,剪刀片被打开。至此织枪完成1个动作周期,按此循环。
2 双曲柄滑块机构特性分析
2.1 双曲柄滑块机构
运动学分析是了解机构运动性能的重要手段,同时也是研究机构动力性能的必要前提。

2.2 双曲柄滑块机构的数学模型
由于上下2个曲柄滑块机构运动规律相同,且二者相关联,因此,本文只分析上曲柄滑块机构。由图3矢量封闭图形OABE得封闭矢量方程[11-12]为
(1)
即l1·eiθ1+l2·eiθ2+l3·ei0=lOE·ei0
应用欧拉公式eiθ=cosθ+isinθ,将式(1)的实部和虚部分离,即可得位置方程式为
(2)
对式(2)两边对时间t求导,得到速度方程式为
(3)
对式(3)两边对时间t求导,得到加速度方程式为
(4)
同理,可得下曲柄滑块机构的位置方程为
(5)
速度方程为
(6)
加速度方程为
(7)
2.3 基于Simulink的运动学仿真和分析
该双曲柄滑块机构中,l1=10 mm、l2=60 mm、l3=100~120 mm、l4=12.5~25 mm、l5=70 mm、l6=100 mm、l=160~170 mm。
选用调试好的数据进行仿真,即l3=110 mm、l4=20 mm、l=165 mm、n1=120 r/min、θ=180°。将上述设计参数代入双曲柄滑块机构的数学模型中,利用MatLab中的Simulink模块编程求解[13-15],得出钢针和剪刀的运动规律曲线,如图4~6所示。
由图4可知,压布位置处于钢针尖和剪刀尖运动曲线交叉点位置之下,1个循环周期中有2个时间段,钢针尖和剪刀尖同时处于地毯下方,2个时间段的持续时间相等(约为0.11个周期)。由图6可知最大加速度为4 m/s2,2个滑块质量都在50 g左右,滑块的惯性力最大为0.2 N,运动较为平稳。设计考虑到尺寸限制,l2与l5尽可能长,以起到减小最大加速度和增大传动角的作用。
h=l4+l5+l6-l
(8)
2.4 双曲柄滑块机构的调试论证
由式(2)得
(9)
同理由式(5)得
(10)
由织枪机构的工作原理可知,钢针尚未离开底布剪刀已经刺入底布、在剪刀尚未退出底布钢针已经开始了第2次扎入地毯底布,这2种状态说明1个周期有2段时间钢针和剪刀同时插在底布中。由2.3可知,θ=180°时,这2种状态的持续时间相等,实际操作证明这样的设置合理。
根据上述结论,进行反向推导辅助调试。设定θ=180°,h=20 mm,织造中每个周期钢针和剪刀刺入织布中的时间相等且有10%的时间同时刺入底布中。
根据上述条件列出方程
(11)
将式(9)、(10)代入式(11),利用MatLab编程求解式(11),结果为
(12)
同理求得不同绒高时可调整参数的最优值如表1所示。
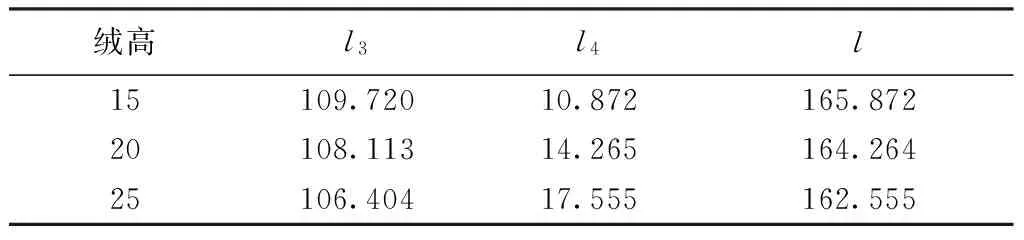
表1 不同绒高时可调整参数的最优值Tab.1 Optimal values of adjustable parameters corresponding with different pile heights mm
由表1可知,随着绒高增大,l3和l应调小,l4应调大。以h=20 mm这组数据再次仿真,得到钢针、剪刀的运动曲线如图7所示。
由图7可知,所得结果满足要求,即每半个周期有10%的时间钢针和剪刀同时刺入底布,且绒高h=20 mm。
3 结 论

2)基于运动学模型,运用MatLab计算织造不同绒高地毯时可调机构的理论数据,为织枪操作者提供了调试依据,减少了调试时间。
FZXB
[1] 李琳. 浅谈现代地毯的应用与发展 [J]. 轻纺工业与技术, 2011, 40(2): 57-59.LILin.Briefintroductiontotheapplicationanddevelopmentofmoderncarpet[J].LightandTextileIndustryandTechnology, 2011, 40(2): 57-59.
[2] 薛世鑫. 机制地毯 [M]. 北京: 化学工业出版社, 2003:1-2.XUEShixin.Machine-MadeCarpet[M].Beijing:ChemicalIndustryPress, 2003:1-2.
[3] 刘欢胜. 簇绒地毯技术的发展现状 [J]. 北京纺织, 2002, 23(3): 7-11.LIUHuanshen.Thepresentsituationoftuftingcarpettechnology[J].BeijingTextileJournal, 2002, 23(3): 7-11.
[4]CRAWSHAWGH,RUSSELLSJ.Wool[M].UK:WoodheadPublishing, 2002: 290-313.
[5]GOSWAMIKK.AdvancesinCarpetManufac-ture[M].UK:WoodheadPublishing, 2009: 182-268.
[6] 徐洋, 孙志军, 孟婥, 等. 地毯簇绒系统纱线张力建模与分析 [J]. 纺织学报, 2010,31(12): 116-121.XUYang,SUNZhijun,MENGZhuo,etal.Modelingandanalysisonyarntensionofcarpettuftingmachine[J].JournalofTextileResearch, 2010,31(12): 116-121.
[7] 程杭杭. 地毯簇绒机簇绒针传动机构动力学分析 [J]. 制造业自动化, 2012,34(12): 117-119.CHENGHanghang.Dynamicalanalysisofdrivemechanismwithinacarpettuftingmachine[J].ManufacturingAutomation, 2012,34(12): 117-119.
[8] 李丁霖, 徐洋. 基于ADAMS的簇绒地毯机针连杆机构动力学分析 [J]. 机械传动, 2016,40 (2): 100-103.LIDinglin,XUYang.DynamicsanalysisofneedlerodmechanismoftuftingcarpetmachinebasedonADAMS[J].JournalofMechanicalTransmission, 2016,40(2): 100-103.
[9] 夏胜华, 孙以泽, 孟婥, 等. 簇绒地毯织机提花装置的绕纱动态张力分析 [J]. 纺织学报, 2015,36(7): 136-141.XIAShenghua,SUNYize,MENGZhuo,etal.Dynamictensionanalysisonwindingyarninjacquarddeviceoftuftingcarpetmachine[J].JournalofTextileResearch, 2015,36(7): 136-141.
[10] 周虎, 李月, 禚洪昌, 等.SVG在手工枪刺地毯簇绒自动化中的应用 [J]. 制造业自动化, 2015,37(5): 39-41,70.ZHOUHu,LIYue,ZHUOHongchang,etal.ApplicationofSVGinhand-tufedcarpettuftingautomation[J].ManufacturingAutomation, 2015,37(5): 39-41,70.
[11] 孙桓, 陈作模, 葛文杰. 机械原理 [M]. 北京:高等教育出版社, 2006:37-43.SUNHuan,CHENZuomo,GEWenjie.PrincipleofMechanics[M].Beijing:HigherEducationPress, 2006:37-43.
[12] 张游. 考虑运动副间隙的曲柄滑块机构动力学建模与分析 [D]. 哈尔滨: 哈尔滨工业大学, 2013:30-34.ZHANGYou.Dynamicmodelingandanalysisofcrank-slidermechanismwithkinematicpairclearance[D].Harbin:HarbinInstituteofTechnology, 2013:30-34.
[13] 陈江义, 刘竹丽, 王迎佳.SIMULINK环境下双曲柄滑块机构的运动学分析 [J]. 郑州大学学报(工学版), 2009, 30(3): 79-81,86.CHENJiangyi,LIUZhuli,WANGYingjia.Kinematicanalysisfortwo-crank-slidermechanismbasedonSIMULINK[J].JournalofZhengzhouUniversity(EngineeringScience), 2009, 30(3): 79-81,86.
[14] 陈德为. 曲柄滑块机构的MatLab仿真 [J]. 太原科技大学学报, 2005, 26(3): 172-175.CHENDewei.TheMatlabsimulationofslider-crankmechanism[J].JournalofTaiyuanUniversityofScienceandTechnology, 2005, 26(3): 172-175.
[15] 耿其东, 方志国. 偏置式曲柄滑块机构仿真与运动分析 [J]. 机械工程与自动化, 2011 (3): 49-51,54.GENGQidong,FANGZhiguo.Statisticsofpatternstructureforcashmere[J].MechanicalEngineeringandAutomation, 2011(3): 49-51,54.
Analysis on mechanical structure of electric tufting gun
QIAN Zhipeng, MENG Zhuo, ZUO Shuo, LUO Juan
(College of Mechanical Engineering, Donghua University, Shanghai 201620, China)
In order to master the using method and debugging methods of the electric tufting gun and improve the quality of tufting, a type of the electric tufting gun was chosen as the research object. First, the mechanical structure characteristics and working principles of the electric tufting gun are introduced. Then, in order to be familiar with the coordination requirements between needle and scissor, MatLab-Simulink is used for the kinematics simulation and time series analysis of two-slider-crank mechanism. Finally the results of kinematics equation can be used for variable parameter adjustment, which is convenient for tufting gun debugging to satisfy the requirement of weaving the corresponding pile height. The theoretical data can be used to debug the tufting gun and reduce the debugging time.
electric tufting gun; mechanism; two-slider-crank mechanism; steel needle
10.13475/j.fzxb.20150901405
2015-09-07
2015-03-23
国家自然科学基金项目(51375084);教育部博士点基金项目(20130075110002)
钱志鹏(1990—),男,硕士生。主要研究方向为簇绒地毯机械。孟婥,通信作者,E-mail: mz@dhu.edu.cn。
TH 112.1
A
