Numerical Evaluation on Dynamic Positioning for Semisubmersible Platform based on Backstepping Control
2016-05-16ZHANGYufangLIUChangdeZHANGFengweiWANGZhipeng
ZHANG Yu-fang,LIU Chang-de,ZHANG Feng-wei,WANG Zhi-peng
(1.Department of Electrical Engineering,Nantong University,Nantong 226019,China;2.National Key Laboratory of Science and Technology on Hydrodynamics,China Ship Scientific Research Center,Wuxi 214082,China)
Numerical Evaluation on Dynamic Positioning for Semisubmersible Platform based on Backstepping Control
ZHANG Yu-fang1,LIU Chang-de2,ZHANG Feng-wei2,WANG Zhi-peng2
(1.Department of Electrical Engineering,Nantong University,Nantong 226019,China;2.National Key Laboratory of Science and Technology on Hydrodynamics,China Ship Scientific Research Center,Wuxi 214082,China)
The positioned floating structures are continuously exposed to environmental disturbances of wind,waves and current.So the motions have obviously delay,large inertia and nonlinear characteristics.In order to overcome these problems,a backstepping control algorithm is presented.This controller is robust to variations in environmental and loading conditions by incorporating adaptive strategy to compensate environmental disturbances.The stability of designed controller is proved by using the Lyapunov theory.The performance of the controller is validated by numerical simulations of a semisubmersible platform with azimuth thrusters in operation and survival conditions.The simulation results indicate that the designed controller is very efficient and satisfactory performance of station and heading keeping is observed.The studied work can provide technique support for practical applications in full-scale and model tests of floating structures.
dynamic positioning;semi-submersible platform;backstepping control; robust;numerical simulation
0 Introduction
The offshore structures used for drilling and production of oil and gas are exposed to some of the harsh environments,with winds reaching hurricane force.The reliability of the structure and its subcomponents is crucial for keeping the crew safe and the operation up and running.Dynamic positioning(DP)system was first discovered as a way of positioning ships in the early 1960s.It rapidly grew and now DP is established as a reliable way of controlling the position and heading of a vessel subjected to environmental and external forces by using its own actuators.DP systems perform well in deep as well as shallow water and the costs do not increase significantly with water depth.
The DP systems are a complex system composed of environmental and position sensors, control allocation algorithms and thrusters.Among of them,the control system plays an important role in the DP systems,which is responsible for calculating the forces to be delivered by each thruster to counteract the environmental forces,such as wind,waves and current loads. The traditional control algorithm(proportional-integral-differential,PID)has been widely applied to the DP systems[1-5],but the effectiveness and performance of PID controller heavily depends on the accuracy of mathematical model and the choice of proportional,integral and differential constants.Besides,many PID controllers are frequency sensitive and a filtering of signals from the sensors is required to achieve a good control performance.Moreover,the controller’s performance varies with environmental and loading condition.The DP operator must manually alter the controller gains according to the changes of environmental and loading condition.
Another important issue is the robustness of the controller.The mathematical model used to describe the motions of offshore platform at sea,where the platform is subjected to wind, waves,and current,is highly nonlinear,and motion is difficult to model mathematically.Thus, the controller design of DP systems must consider the property of robustness.In previously presented researches,Tannuri and Donha[6]designed the H∞controller,which presented satisfactory robustness properties with good performance in large variations in environmental conditions,modeling errors,and parameter uncertainty.However,it is a linear controller,so different controllers must be designed during operation.Nguyen and Sørensen[7]proposed a hybrid DP system with supervisory switching control logic to alternate between the bank of controllers and observers,and the stability was validated by the model experiment.In order to overcome the linearization problems,many nonlinear controllers have been applied to DP systems[8-10].Tannuri[11]applied nonlinear sliding mode control approach to DP systems and demonstrated the robust properties.
In the present work,we mainly focus on the design of controller for platform equipped DP systems.The thrust allocation algorithm is based on a modified algorithm,by Liu et al[12],the physical limitations on the thrusters to admissible thrusts and azimuth angles are considered in this paper.In order to demonstrate the designed controller which is capable of achieving a good control for different loading conditions,the DP numerical simulation was carried out with an offshore platform,satisfactory performance of station and heading keeping is observed.
1 Mathematical modeling
For the DP system,it is common assumption to assume that the motions induced by rolling and pitching of offshore platform are negligible,only horizontal motions of the offshore platform need to be considered.The low frequency motion can be expressed in two coordinate systems (Fig.1),the earth-fixed frame is right-handed coordinate system indicated by OEXEYEZEand body-fixed non-inertial reference frame is indicated by OXYZ.The origin O for the latter sys-tem is the intersection of the center of the platform mass.
The low frequency motion of the offshore platform in 3 degree of freedom can be modeled as
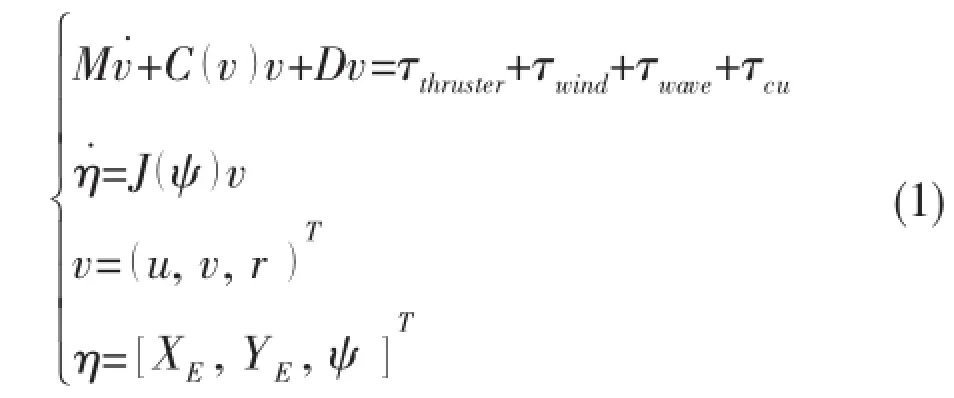

Fig.1 Earth-fixed and body-fixed frame
The velocity v=(u,v,r)Tis given relative to the body-fixed frame,τwind,τwave,τcuare the vector of environmental forces and yaw moment (wind,waves,current),τthrusteris the vector of thruster forces in surge,sway and yaw.The rotation matrix J(ψ)∈R3×3,

For low-speed motion in DP,linear damping is a good assumption.Similarly the quadratic velocity terms given by C(v)v are negligible.The inertia matrix(including added mass)M and damping matrix D are given by

Normally,the wind speed and direction can be measured with reasonable accuracy in DP systems,in order to counteract the wind forces τwindas quickly as possible,the feed-forward concept is used.For the unmeasured external forces(such as waves and current),the adaptive strategy of environment compensator is designed to compensate them.
Define Td=τwave+τcuas the unmeasured external disturbances,rewriting Eq.(1)as Eq.(2):

2 Design of controller
The objective of DP controller is to choose the thruster forces to be applied such that the platform reaches desired inertial coordinate.In this paper,the backstepping design and adaptive law are induced.The detailed steps are as follows:
Step1:Define the position error as

where ηdis a desired position of the offshore platform,the derivative of S1is

A Lyapunov function candidate is chosen asUsing Eq.(4),the derivative of V1is

Accordingly,it is desired that η can converge to ηdas the time goes by.For Eq.(4),we suppose that the virtual control v can be used to drive S1to zero,then we take the stabilizing function or virtual controller a to replace v,definite


Since k1is positive,therefore Eq.(7)is negative semi definite,so by using Barbalat’s Lamma, we have S1will be driven to zero.
However,there must be an error between the real state v and stabilizing function α,so get the following step 2.

From Eq.(2),the derivative of Eq.(8)isboth sides ofare multiplied by M.It is simply for the numerical convenience,we obtain

Consider the Lyapunov function candidate for the subsystem Eq.(9)as

Similarly,it is wanted to find a suitable input τthrusterto make the derivate of V2negative definite or negative semi-definite.So that two errors S1,S2will be driven to zero.Using Eqs.(5), (6)and(10),the derivate of V2can be obtained as

Take the actual control input τthrusteras follows:

From Eq.(12),the derivate of V2is negative definite.However,in the process of actual project work,it can not accurately measure the value Td,so an adaptive strategy is used to estimate Td.
从主体论角度探究诗歌翻译还需要考察主客体的关系。作者发现:中国古代思想史中,主体对客体的施为方式包括格物、感物和体物,而诗歌翻译也存在这三种审美方式。最理想的译诗应该和原诗的审美方式一致,继承原诗的审美品质;然而,由于诸多影响,翻译时可能会出现变异甚至错位,并相应地改变诗歌文本的审美效果。

Consider the following Lyapunov function candidate as

From Eqs.(11)and(13),take an adaptive law asthen the derivate of Vcan be3obtained as

Since k1,k2are positive,thereforeis negative semi definite,which shows V3is nonincreasing and bounded.From Eq.(14),it can easily show that S1,S2,are bounded.Then using Eqs.(4)and(9),we have

where implies that S1,S2∈L2.
Finally,since S1,S2∈L2∩L∞,andby using Barbalat’s Lemma,S1and S2will be driven to zero.So the control goal is achieved.
3 Numerical simulation
In order to make validation of the designed controller,a deep water semi-submersible offshore platform is used.The offshore platform is equipped with 8 azimuth thrusters.Thrusters’position is shown in Fig.2.The main particulars of the offshore platform are given in Tab.1.It should be noted that rotating thrusters are only allowed to give positive thruster force.
3.1 Environment condition simulation
Simulations were conducted with wind,current and waves in two load conditions.The current and wind load coefficients will be obtained by the CFD method.The wind load coefficients are defined as:


Fig.2 Thruster layout of the offshore platform
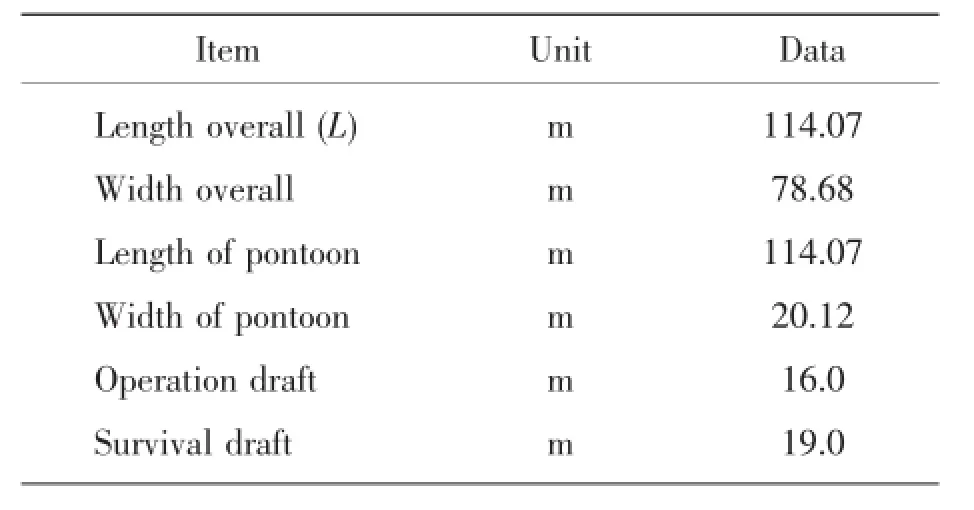
Tab.1 Main particulars of the offshore platform
where Xwindand Ywindare surge and sway force,Mwindis yaw moment,ρais air density and Vwis mean wind velocity,Cxw,Cywand Cmware non-dimensional coefficients of the corresponding wind force or moment,are presented in Fig.3.
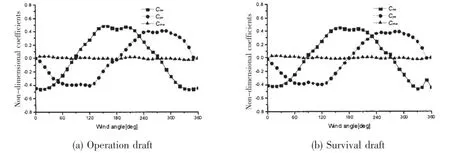
Fig.3 Wind load coefficients
The non-dimensional coefficients of the corresponding current force or moment are defined as:

where Xcand Ycare surge and sway force,Mcis yaw moment,ρwis water density and Vcis the current velocity,Cxc,Cycand Cmcare current coefficients,are presented in Fig.4.
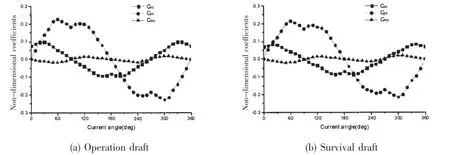
Fig.4 Current load coefficients
The mean wave drift forces(second order)RAOs and added mass were calculated by using AQWA software.And then all loads were simulated(the wind velocity and current velocity were 23.0 m/s and 1.0 m/s corresponding operation condition,the wind velocity and current velocity were 41.1 m/s and 2.1 m/s corresponding survival condition,the direction is the same as wave).Disturbances in terms of irregular waves using JONSWAP wave spectrum with amplitude 6.0 m(peak period 11.2 s,peak shape parameter 2.0)and 13.7 m(peak period 16.0 s, peak shape parameter 2.4)were adopted,corresponding to operation condition and survival condition respectively.
3.2 Simulation results
In this paper,the performance of DP for semi-submersible platform based adaptive backstepping control is evaluated by two loading condition,operation condition with different thruster working mode and survival condition. The operation mode is the fixed set point DP operation mode,used in drilling operations for example.The offshore platform must be kept close to a fixed set point.Abrupt motions may cause interruption of operation.Considering the environmental loads with wind,waves and current as above,the simulations were carried in three cases presented in Tab.2.
In DP station keeping operation.The wave direction 180°was analyzed.Fig.5 shows the comparison of the actual and desired results about surge sway and yaw angle movements with intact working mode for thrusters.It is observed that the simulation results have a good agreement with the desired results.It can maintain the desired heading well in the environmental disturbances.

Tab.2 Numerical simulation cases

Fig.5 Actual and desired results in operation condition(intact)
Fig.6 shows the simulation results when thrusters 1 and 8 are failure.It can be seen that these surge,sway and yaw angle movements are quite close to the case No.1 because of the high thrusters redundancy.
The designed controller employed an adaptive strategy to inhibit the unknown environmental disturbances.So the most desirable characteristic of the adaptive backstepping is its robustness.In this paper,it is verified by changing loading and environmental condition of theoffshore platform.The same control parameters are used in the simulation for the survival condition of the offshore platform.Fig.7 shows the simulation results for surge sway and yaw direction with survival condition,satisfactory performance was observed in this condition.This illustrates the robustness of the designed controller.

Fig.6 Actual and desired results in operation condition(T1&T8 failure)

Fig.7 Actual and desired results in survival condition(intact)

Fig.8 Power consumed percentage in operation condition(intact)

Fig.9 Power consumed percentage in operation condition(T1&T8 failure)
The percentage of power consumptions for each azimuth thruster is presented in Figs.8,9 and 10 for three cases.As can be noticed,the mean power consumptions of all azimuth thrusters are approximately 25.5%and the maximum power consumption is 26.9%for thruster 5 in intact mode,the percentage increases by about 5%for thrusters 2,5 and 6 when thrusters 1 and 8 are inactive in operation condition.In the survival condition,the mean power consumptionsfor all azimuth thrusters are nearly 74%to 78%, the maximum power consumption is 84.6%to keep the positions and yaw angle during the whole simulation.
4 Conclusions
In this paper,a controller for dynamic positioning system is presented based on adaptive backstepping control and makes use of nonlinear multivariable mathematical models.The effectiveness of the designed controller was validated by domain simulation of an offshore platform equipped with azimuth thrusters under the action of wind,waves and current.The simulations also take other aspects into account,such as the physical limitations on admissible thrusts and azimuth angles of the thrusters.The simulation results indicate that the designed controller of DP system is very efficient to maintain the po sition and heading in different loading and environmental condition with different thruster working mode.

Fig.10 Power consumed percentage in survival condition(intact)
[1]Leira B J,Asgeir J S,Larsen C M.A reliability based control algorithm for dynamic positioning of floating vessels[J]. Structural Safety,2004,26(1):1-28.
[2]Berntsen P I B,Aamo O M,Leira B J.Structural reliability-based control of moored interconnected structures[J].Control Engineering Practice,2008,16(4):495-504.
[3]Xia G,Shi X,Fu M,Wang H,Bian X.Design of dynamic positioning systems using hybrid CMAC-based PID controller for a ship[C].IEEE International Conference Mechatronics and Automation,2005:825-830.
[4]Ruth E.Propulsion control and thrust allocation on marine vessels[D].Norwegian University of Science and Technology, Trondheim,October 2008:67-86.
[5]Tannuri E A,Bravin T T.Development of A Dynamic Positioning System Simulator for Offshore Operations[C].17th International Congress of Mechanical Engineering,November 2003:10-14.
[6]Tannuri E A,Donha D C.H∞controller design for dynamic positioning of aturret moored FPSO[C]//In Proceedings of the fifth IFAC conference on maneuvering and control of marine crafts.Denmark,2000:269-274.
[7]Nguyen T D,Soensen A J,Quek S T.Multi-operational hybrid controller structure for station keeping and transit operations of marine vessels[J].IEEE Transaction on Control System Technology,2008,16(3):491-498.
[8]Torsetnes G.Nonlinear control and observer design for dynamic positioning using contraction theory[D].Norwegian University of Science and Technology,Trondheim,January 2004:15-39.
[9]Tannuri E A,Agostinho A C.Higher order sliding mode control applied to dynamic positioning systems[C]//Proceedings of the Eighth IFAC Conference on Control Applications in Marine System.Rostock-Warnemunde,Germany 2010:132-137.
[10]Koshkouei A,Burnham K,Law Y.A comparative study between sliding mode and proportional integrative derivative controllers for ship roll stabilization[J].IET Control Theory Applications,2007,1(5):1266-1275.
[11]Tannuri E A,Agostinho A C,Morishita H M,Moratelli L Jr.Dynamic positioning systems:An experimental analysis of sliding mode control[J].Control Engineering Practice,2010,18(10):1121-1132.
[12]Liu Changde,Sun Qiang,Wei Naxin,et al.Research on nonlinear optimization of thrust allocation in dynamic positioning system[J].Journal of Ship Mechanics,2013,17(12):1403-1410.
基于反步控制的半潜平台动力定位数值计算研究
张玉芳1,刘长德2,张凤伟2,王志鹏2
(1.南通大学电气工程学院,江苏南通226019;2.中国船舶科学研究中心水动力学重点实验室,江苏无锡214082)
装配动力定位系统的浮式结构物由于受到风、浪、流等交变载荷影响,其运动具有明显时滞和非线性特性,为克服传统控制策略抗干扰能力差对动力定位控制性能的影响,文章基于反步法,对动力定位系统进行了控制器设计研究,针对波浪及流外载荷形成的有界干扰问题,采用自适应策略进行估计补偿。并借助Lyapunov理论分析了闭环系统的稳定性。最后以某深水半潜平台为对象,对其不同工况下动力定位作业进行了数值计算研究,验证了所设计控制器具有良好的鲁棒性,可为后续动力定位模型试验及实船控制器设计提供理论支撑。
动力定位;半潜平台;反步控制;鲁棒性;数值仿真
TP273
A
张玉芳(1982-),女,博士,南通大学电气工程学院讲师;刘长德(1982-),男,博士研究生,中国船舶科学研究中心高级工程师;张凤伟(1985-),男,中国船舶科学研究中心工程师;王志鹏(1986-),男,中国船舶科学研究中心工程师。
TP273 < class="emphasis_bold">Document code:A
A
10.3969/j.issn.1007-7294.2016.12.005
1007-7294(2016)12-1547-10
Received date:2016-08-29
Foundation item:Supported by the National Basic Research Program of China(973 program)(Grant No.2014CB046706); National Sci-Tech Support Plan(Grant No.2014BAB13B01);Scientific Research Foundation of Nantong University(Grant No.14R04);National Natural Science Foundation of China(Grant No.51307089)
Biography:ZHANG Yu-fang(1982-),female,Ph.D.,lecturer of Nantong University,E-mail:zhangyuf188@126.com; LIU Chang-de(1982-),male,senior engineer of CSSRC.
猜你喜欢
杂志排行

船舶力学的其它文章
- Effect of Exhaust Angle on Evolutionary and Flow Characteristics of Pressure-equalizing Film on Surface of Underwater Vehicle
- Study on a 3D Time-domain Method to Predict Parametric Rolling of a Ship in Regular Head Seas
- Dynamics and Experiments of a Laboratorial Underwater Glider
- Prediction of Ship-Ship Interaction Forces in Shallow Water Using a High-order Panel Method
- Preliminary Evaluation of Maraging Steels on Its Application to Full Ocean Depth Manned Cabin
- Study on the Connector Loads Characteristics of a Very Large Floating Structure in the Impact Accident