超声波测距避障技术在智能小车上的应用研究
2016-05-13周明江刘永梅
周明江,刘永梅
(1.淮北职业技术学院 电子信息工程系,安徽 淮北 235000;2.国网濉溪县供电公司,安徽 淮北 235000)
超声波测距避障技术在智能小车上的应用研究
周明江1,刘永梅2
(1.淮北职业技术学院 电子信息工程系,安徽 淮北235000;2.国网濉溪县供电公司,安徽 淮北235000)
摘要:近年来,智能小车在危险恶劣环境下替代有人系统,从事探测救灾等工作取得令人满意的效果,基于超声波技术的智能小车测距避障技术是通过超声波测距避障理论基础及计算公式,设计出超声波发送及接收的硬件电路及测距避障的软件框图,经试验超声波测距避障技术在智能小车上应用非常成功。
关键词:超声波;智能小车;测距避障
0引言
运行在指定轨道上的智能小车有可能会遇到各种设定的障碍物,在智能小车的控制中需要设置相应的避障系统,以便使智能小车在遇到种种未知障碍时能够绕开并继续前进,达到小车智能避障的目的。
1超声波测距避障原理
超声波是频率比声波高的一种机械振荡波,其频率在20KHZ以上。超声波和其他机械波一样,根据其振动方向和波的传递方向的关系可分为横波和纵波两种。超声波的传播介质可以是固体、液体甚至气体,但是它在不同的介质中的传播速度不同,同时受环境温度影响也较大,比如常温下超声波在空气中的传播速度随温度每升高1℃增加0.18%;在水中常温下温度每升高1℃,速度增加0.3%。超声波在常见介质中的传播速度表1所示。
表1

超声波在常见介质中的传播速度
利用压电晶体既可以做超声波发生器,发出超声波,还可以做超声波接收器,检测反射回来的超声波,通过一定的电路给换能器加一个时间极短的电压脉冲,换能器便将电脉冲转变为超音频的机械振动以超声波的形式在空气中传播,若超声波探测仪的前方有障碍物时,超声波会被障碍物反射回来。由于换能器是可逆的,将接收到反射回来的机械振动转换为电压脉冲。用计时电路测定超声波在液体中的来回时间,便可以计算出障碍物距离换能器的距离。下面介绍计算距离的方法:
超声波在空气中传播时,传播速度会受到环境温度影响。由前文可知环境温度每升高1℃,传播速度增加0.18%,以环境温度为15℃时的声速为340m/s为基准。当环境温度为T℃时声速v声可由下式(1-1)求得;
v声=(T-15)×340×0.0018+340
(1-1)
则当换能器接收到机械波时,小车与障碍物之间的距离由下式(1-2)求得,
(1-2)
2智能小车超声波测距的硬件电路设计
常用的测距方法有红外测距、激光测距及超声波测距。本设计中采用类似于雷达的工作原理的超声波测量距离。超声波传感器组成包括超声波发射部分和超声波接收部分,下面分别就这两部分的硬件电路设计分别予以介绍。
2.1超声波发射部分的硬件电路设计
超声波发射部分的换能器选用TCT40-16T,设计换能器发出的信号为40kHZ的方波,多谐振荡器产生这样的信号让具备负压电效应(又叫电致伸缩效应)的换能器产生超声波。由555定时器组成的超声波发生电路如图1所示。

图1 发射器电路图
由图可知,555定时器产生的振荡频率由R14决定,调节可变电阻R14,使振荡频率为40kHZ。用一个或非门将单片机的P1.3引脚和555输入端相连,使得能够通过单片机P1.3引脚控制超声波的发射。另外两个超声波发射器的发射分别由P1.4引脚和P1.5引脚控制。
2.2超声波接收部分的硬件电路设计
上文中的超声波换能器TCT40-16T发射的超声波在空气中传播,遇到障碍物便会返回。遇到反射波的换能器TCT40-16R将其转换成电信号,由于该电压的为mV量级,极其微弱,还需功率放大电路进行放大,同时也需比较器及控制电路等环节。具体硬件电路设计图如图2所示。
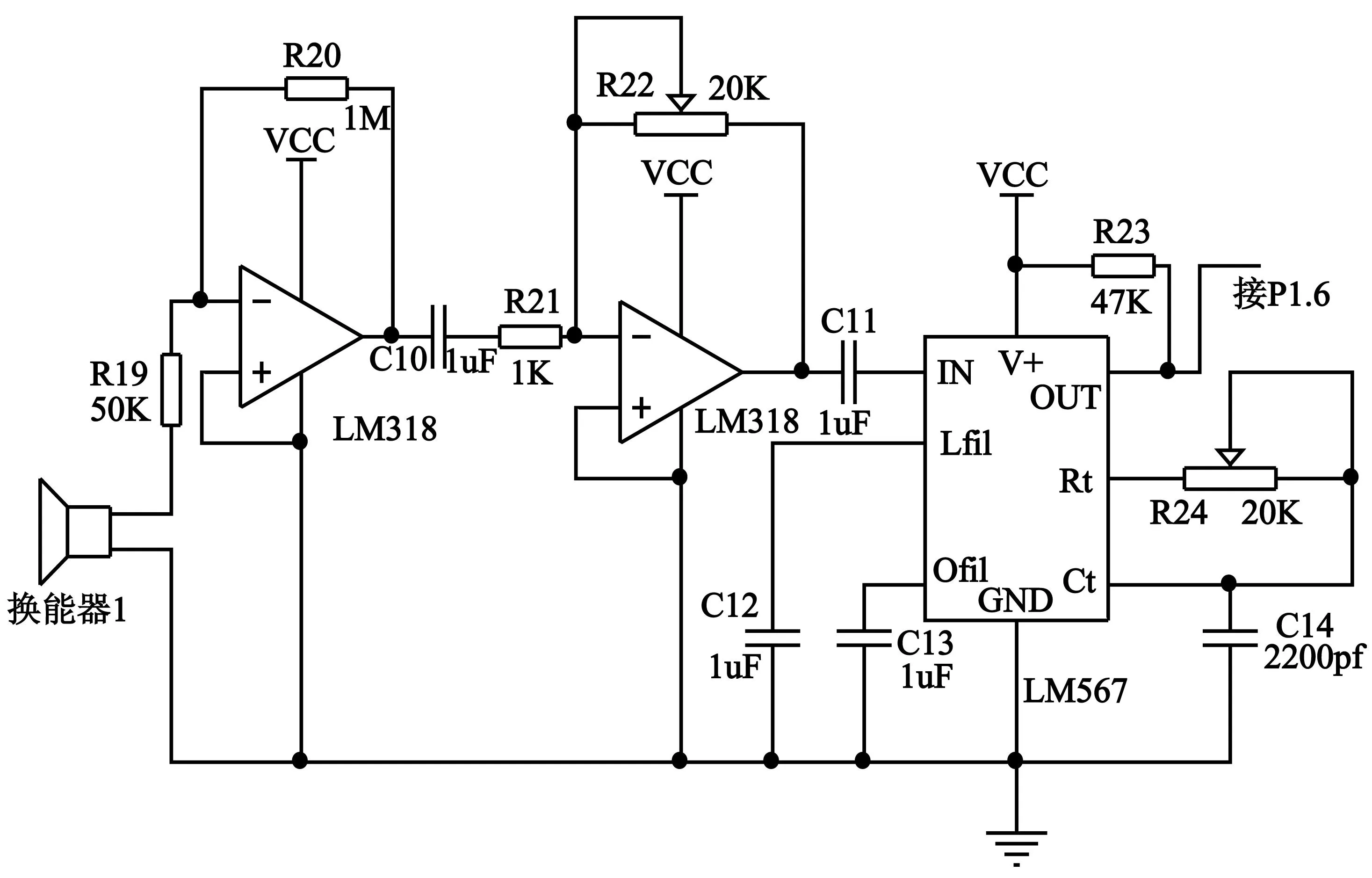
图2 接收器电路图
使用LM318组成两级放大电路对输出信号进行放大,第一级放大倍数为20,第二级放大倍数可以为1~20,通过滑动滑动变阻器R22的滑键改变放大倍数,两级放大倍数最低为20,最高位400,能使接收器接收到的微弱信号得到足够放大。
滤波、检波及选频等功能由LM567来完成。在LM567电路中电容C13调节平衡抗干扰性能与反应速度;电容C12影响锁相环接收器的接收带宽;电容C11限制输入信号的幅值;可变电阻R24和C14将锁相环中心频率锁在40Hz。因此当超声波接收部分的输入大于设定值时,输出引脚就会产生一个下降沿信号,该信号通过P1.6引脚(另外两个超声波接收器分别连接P1.7引脚和P2.5引脚)传送至单片机。通过单片机分析、处理并完成相应动作。
3测距避障模块程序设计
智能小车的测距避障模块程序流程图如图3所示。

图3 智能小车的测距避障模块程序流程图
4结束语
采用超声波测距避障响应速度快,软硬件实现较为容易,应用于智能小车能取得良好的效果。
参考文献:
[1]张国旭,张雅静.智能电动小车超声波测距定位系统的设计[J].煤矿机械,2011(1):31-32.
[2]苏敏,梁银丽,汪道辉.基于路径记忆算法的智能小车控制系统的设计[J].哈尔滨理工大学学报,2011(1):64-68.
[3]GUO Jianming,ZHANG Shouping,XU Jia,ZHOU Shenghui.Kalman Prediction Based VFH of Dynamic Obstacle Avoidance for Intelligent Vehicles[C].2010 International Conference on Computer Application and System Modeling,2010.
[4]王晶. 智能小车运动控制技术的研究[D].武汉:武汉理工大学,2009.
[5]苏敏,梁银丽,汪道辉.基于路径记忆算法的智能小车控制系统的设计[J].哈尔滨理工大学学报,2011(1):64-68.
责任编辑:力草
中图分类号:TP273
文献标识码:A
文章编号:1671-8275(2016)02-0133-02
作者简介:周明江(1980-),男,安徽宿松人,电气工程师,研究方向为汽车电子技术专业教学与研究;刘永梅(1976-),女,安徽淮北人,工程师,研究方向为电气工程技术。
基金项目:本文系安徽省教育厅质量工程项目“现代电子技术实训(实验)中心”(编号:2013sxzx033)、汽车电子技术特色专业(编号:2013tszy060)、淮北职业技术学院质量工程项目“卓越汽车电子工程师人才教育培养计划”(编号:2014zjjh-01)阶段性研究成果。
收稿日期:2015-01-20
