EDEM的铲式成穴器工作过程仿真分析
2016-05-09纪玉杰李成华
王 鹏,纪玉杰,李成华
(沈阳理工大学 机械工程学院,沈阳 110159)
EDEM的铲式成穴器工作过程仿真分析
王鹏,纪玉杰,李成华
(沈阳理工大学 机械工程学院,沈阳 110159)
摘要:采用离散元方法研究铲式成穴器在不同垂直和水平倾角下的工作过程。仿真结果表明,随着成穴器垂直倾角的加大,穴孔长度呈线性增加,穴孔宽度先增大后减小;随着成穴器水平倾角的增加,穴孔长度变大,且加大的速度加快,穴孔宽度也变大,但增大的速度减慢。
关键词:铲式成穴器; 离散元; 仿真
铲式成穴器是铲式精密播种机的重要组成部分,成穴器的结构是影响播种机工作质量的关键[1]。文献[2-3]是在二维情况下模拟铲式成穴器的工作过程,没有考虑到成穴器的一些实际工作位置因素。本文利用EDEM软件模拟成穴器三维情况下的工作过程,使仿真更贴近实际情况。
1铲式成穴器成穴原理分析
1.1铲式成穴器的结构
成穴器由轮盘和均布在轮盘圆周上的打穴铲组成,如图1所示。成穴器与垂直方向形成夹角图中:Rc为成穴器铲轮半径;lc为打穴铲宽度;Hc为打穴铲高度;bc为打穴铲厚度。

图1 铲式成穴器的结构简图
β,简称为垂直倾角;与水平方向形成夹角γ,简称为水平倾角;铲轮半径为Rc。
1.2打穴铲尖端点运动轨迹分析
分析打穴铲尖端点在成穴过程中的运动轨迹,分别在地面上设置固定坐标系xyz,在成穴器的转轴中心处设置x′y′z′坐标系,xoz与x′o′z′面重合,x方向是前进方向,如图2所示。

图2 打穴铲端点几何关系
由图2推导整理得到打穴铲端点K在xyz坐标系中的方程为
(1)
式中φ为成穴器旋转角度。
根据方程(1)绘出打穴铲端点K的运动轨迹,如图3所示。
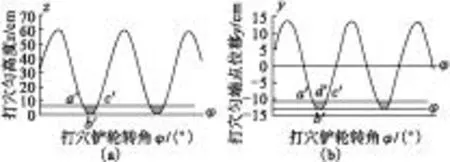
图3 打穴铲端点运动轨迹
1.3成穴器参数对成穴质量的影响
成穴过程产生的穴孔长度L等于打穴铲端点K从入土点a′到出土点c′在x轴上的位移量加上打穴铲宽度在x轴方向上的投影量(图3a),即

(2)
式中ht为成穴器成穴深度(a′c′在z轴上的投影)。
依据公式(2),分析成穴器参数对穴孔长度L的影响,如图4所示,参数取值如下:Rc=325mm,ht=50mm,lc=30mm。
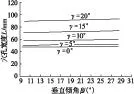
图4 穴孔长度与成穴器参数的关系
由图4可知,成穴器垂直倾角β加大时,穴孔长度L呈线性增加;成穴器水平倾角γ加大时,穴孔长度L变大,且变化的速度随水平倾角γ的加大而加快。
穴孔宽度S为打穴铲端点K从进入土壤的a′到最大深度b′点时,在y轴方向上的侧移量b′d′(图3b),所以穴孔宽度S与成穴器参数间的关系为
(3)

图5 穴孔宽度与成穴器参数的关系
由图5可知,随着垂直倾角β、水平倾角γ的增加,穴孔宽度S增加。
2仿真前处理
2.1成穴器模型
成穴器的结构如图1所示。通过Pro/E完成建模,然后导入EDEM中作为几何模型。
2.2颗粒模型
土壤颗粒采用默认的球形颗粒。
2.3接触模型
仿真中用到Hertz Mindlin无滑动接触模型和Hertz Mindlin粘结约束模型[4]。
Hertz Mindlin无滑动接触模型是EDEM中默认的接触模型,原理如下:半径为R1和R2的两个球形颗粒发生弹性接触(如图6),法向重叠量α为
(4)
式中的r1和r2分别是两球球心的位置矢量。

图6 颗粒接触示意图
两球间的接触面是圆形,接触半径a为
(5)
式中R*为等效颗粒半径,有公式
(6)
颗粒间的法向力Fn的公式为
(7)
公式中弹性模量E*有
(8)
式中:E1、b1为颗粒1的弹性模量和泊松比;E2、b2为颗粒2的弹性模量和泊松比。

(9)
式中:x为系数;Qn为法向刚度;m*为等效质量。
(10)

(11)
式(9)中的系数x和法向刚度Qn的计算公式如下:
(12)
(13)
式中e表示恢复系数。
颗粒间的切向力Ft为
Ft=-Qtε
(14)
式中,Qt表示切向刚度,由两颗粒的剪切模量确定;ε表示切向重叠量。
(15)

切向力Ft和摩擦力μFn有关,μ表示静摩擦因素。
滚动摩擦在仿真中通过接触表面上的力矩Ti来反应,公式如下
Ti=-μ′FnRiωi
(16)
式中:μ′为滚动摩擦因素;Ri为质心到接触点之间的距离;ωi表示接触点处物体的单位角速度矢量。
Hertz Mindlin粘结接触可以阻止颗粒间的法向和切向的相对运动(如图7),只有当应力达到某一值时这种约束才会失效,此后颗粒间的接触变为Hertz Mindlin无滑动接触模型。

图7 湿颗粒土壤接触力学模型
当粘结约束产生后,颗粒间的粘结力Fn、Ft和力矩Tn、Tt随时步δt的增加按式(17)从零开始增加
(17)

当法向和切向应力达到最大值时,黏结被破坏。法向和切向应力最大值为
(18)
3成穴器工作过程仿真
3.1参数选取
土壤含水率是指在一定体积内土壤中水的重量占土壤总质量的百分比,本文模拟的是含水率为15%的土壤,即
(19)
式中:M1为土壤颗粒质量;M2为水分的质量;ρ1、ρ2分别为土壤密度和水分密度;V1、V2分别为土壤颗粒的体积和水分的体积。根据文献[5-6]可知土壤参数如下:颗粒半径为1mm,密度为2680kg/m3,泊松比为0.3,剪切模量为108,弹性恢复系数为0.3,摩擦系数为0.5,接触法方向刚度为108,接触切向刚度为5×107。为加快仿真速度且不影响仿真效果,可以适当放大土壤颗粒半径为2mm,已知水的密度为1000kg/m3,由计算可知,粘结半径为2.6mm。土壤颗粒在1s时发生粘结,临界法向压力设置为30000Pa,临界切向压力设置为15000Pa[7],其它力学模型参数如表1所示。
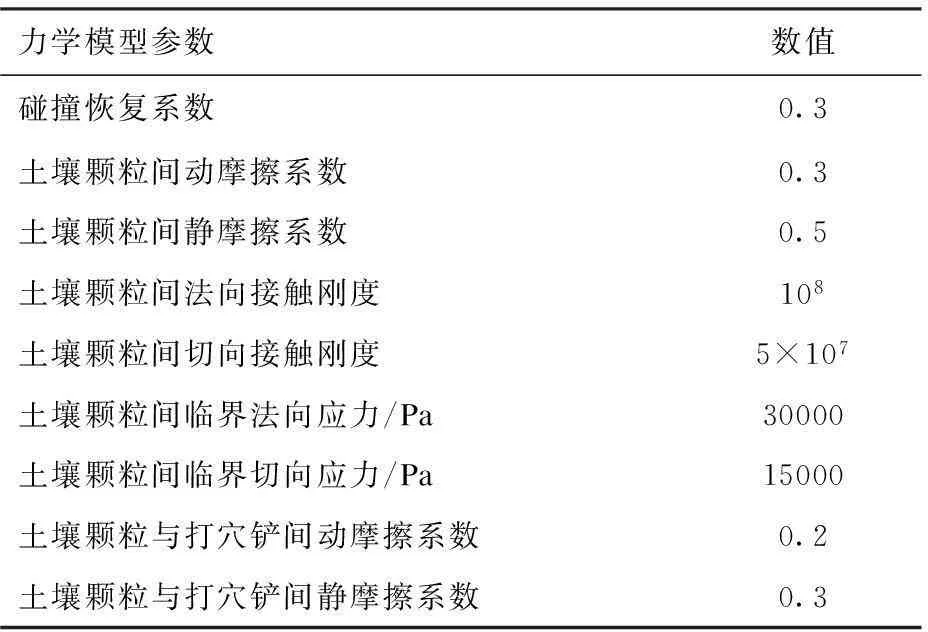
表1 仿真力学模型参数
3.2垂直倾角对穴孔大小的影响
为保证成穴器能正常成穴,在垂直倾角β=15°~36°范围内仿真成穴器的成穴性能,成穴仿真过程如图8所示。随着垂直倾角的加大,穴孔长度呈线性增加;穴孔宽度先增大后减小,如图9所示。

图8 单个打穴铲的成穴过程

(a)β与L的关系

(b)β与S的关系
3.3水平倾角对穴孔大小的影响
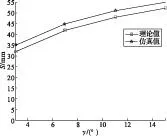
为保证成穴器能正常成穴,在水平倾角γ=3°~15°范围内仿真成穴器的成穴性能。穴孔长度随着水平倾角的加大而增加,且增加的速度变快;穴孔宽度随着水平倾角的增加而加大,且加大的速度变慢,如图10所示。
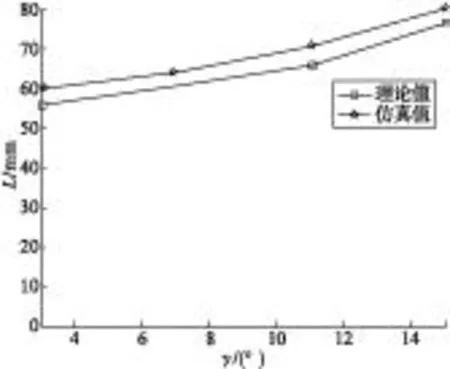
(a)γ与L的关系
(b)γ与S的关系
4结论
(1)随着成穴器垂直倾角的加大,穴孔长度呈线性增加,穴孔宽度先增大后减小。
(2)随着成穴器水平倾角的上升,穴孔长度变大,且变大的速度加快;穴孔宽度也加大,且增大的速度减慢。
仿真分析初步说明了采用离散元法分析在外力作用下土壤动态破环过程的可行性。
参考文献:
[1]李成华,何波.铲式玉米精密播种机仿真及虚拟设计[M].北京:中国农业大学出版社,2007.
[2]Yujie Ji,Hongda Xue,Chenghua Li.Simulation analysis of seed metering procedure in scoop metering device based on discrete element method[J].Applied Mechanics and Materials, 2012(157-158):550-557.
[3]纪玉杰,于淼,李成华.铲式成穴器工作过程的离散元仿真分析[J].沈阳农业大学学报,2014,45(1):113-116.
[4]王国强,郝万军.离散单元法及其在EDEM上的实践[M].西安:西北工业大学出版社,2010.
[5]南京水利科学研究院土工研究所.土工试验手册[M].北京:人民交通出版社,2007.
[6]孙其诚,王光谦.颗粒物质力学导论[M].北京:科学出版社,2009.
[7]张永良.基于离散元的逆转旋耕施肥播种机抛土性能仿真及试验研究[D].镇江:江苏大学,2012.
(责任编辑:赵丽琴)
Simulation Analysis of Working Process of A Spade Soil Opener Using EDEM
WANG Peng, JI Yujie, LI Chenghua
(Shenyang Ligong University,Shenyang 110159,China)
Abstract:The working process of a spade soil opener was examined in a large range of horizontal and vertical angle using discrete element methods.The results show that the length of soil hole increases linearly and the width of the soil hole first increases and then decreases with the increment of horizontal angle,the length of soil hole increases fast and the width of the soil hole increases slow with the increment of vertical angle.
Key words:soil opener;discrete element methods;simulation
中图分类号:TP391.9;S223.2
文献标志码:A
文章编号:1673-4599(2016)01-0001-05
作者简介:王鹏(1990—),男,硕士研究生;通讯作者:纪玉杰(1970—),男,副教授,工学博士,研究方向:CAE,机械可靠性。
基金项目:国家自然科学基金资助项目(51075282)
收稿日期:2015-06-11
