井下油管切割设备深度定位系统的研究
2016-05-09闫家超杨俊海许忠迪陈凤波王小强
闫家超,杨俊海,许忠迪,陈凤波,陈 震,王小强
(1.沈阳理工大学 机械工程学院,沈阳 110159;2.中国石油长城钻探工程公司,辽宁 盘锦 124000)
井下油管切割设备深度定位系统的研究
闫家超1,杨俊海1,许忠迪1,陈凤波2,陈震2,王小强2
(1.沈阳理工大学 机械工程学院,沈阳 110159;2.中国石油长城钻探工程公司,辽宁 盘锦 124000)
摘要:基于马丁代克测井仪对井下油管切割设备进行深度定位,将井深的物理位移量转换成单片机能够识别的TTL电平脉冲信号,单片机进行数据的处理与运算,通过液晶显示屏显示深度、速度等井下信息,并且通过proteus仿真软件进行仿真,验证了测井系统的正确性。
关键词:深度定位;TTL电平;proteus软件仿真;马丁代克
国内大部分油田进入中后期,大修工作量不断增加,发生管柱卡钻的油气井也呈上升趋势。现场采用传统的解卡方式难以解卡,文中切割设备通过液压马达驱动割刀旋转将井管切断提出井外,再进行下一步的修井作业。切割设备需要通过连续油管与井下切割设备连接后由连续油管作业机将设备从油管内部通过,将切割设备输送到油管的预定切割位置,然后通过地面液压泵对连续油管泵入水溶液,调控压力与流量,使井下固定卡紧机构紧紧地卡住油管管柱内壁,使切割设备不会产生轴向的串动和径向振颤与偏转,随着泵压与流量的增大使液压螺杆马达开始做行星转动,再通过万向轴的变相作用将螺杆马达的行星转动转变成定轴运动,液压推动刀杆使刀具伸出壳体并在壳体带动下旋转切割,从而实现切割设备的井下管内的切割作业。
目前在石油测井领域,需要在地面测井系统能够提供准确有效的深度信息。在运行过程中设备可能由于需要上提或者下放操作,井深定位系统需要确保设备能够准确到达指定深度,然后对井管进行切割。
由于连续油管作业机的深度测量方式是采用连续油管滚筒的圈数计数的方式,在使用过程中随着连续油管的下放,其滚筒直径会发生变化,其测量深度亦会出现误差[1],为了能够更准确地确定井下深度,本文采用单片机记录深度的方式,不仅能够准确记录井下深度,还能显示速度的大小与设备运行的方向。为井下操作提供更完善的信息。
1切割设备入井及深度信息提取
图1为切割设备入井过程示意图。切割设备与连续油管相连,测井电缆与切割设备顶端相连,连续油管作业车将连续油管设备向井口输入,电缆绞车配合作业车同时进行。首先将测井系统深度进行清零,当切割设备底端与防喷器顶端油管口对齐时,点击测深系统开始键,测井系统开始计数测量深度、速度信息。
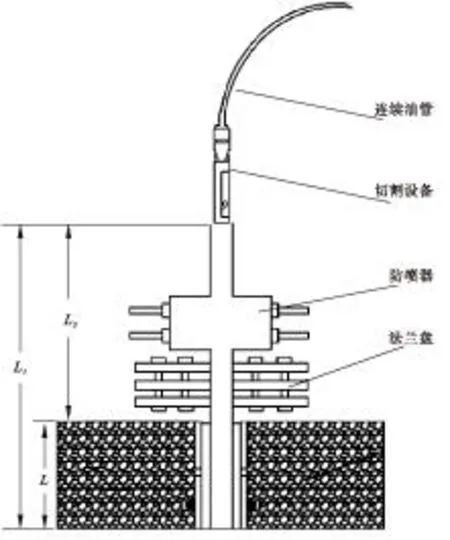
图1 切割设备入井过程示意图
L1为实际井深深度,L2为油管口距地面距离,L为马丁代克测井系统所测量距离。因此实际井深L1=L+L2。
图2为防喷器原理示意图。其主要结构包括液压缸、液压油进口管、活塞、防喷器外壳体等。
切割设备需带压进行修井作业,为防止出现井喷事故,设备入井首先需通过防喷器,因此在设计时需考虑防喷器的影响[2]。
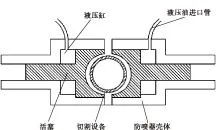
图2 防喷器原理示意图
该井深系统主要设备如下:马丁代克深度测井仪,为深度定位提供TTL信号;AT89S52单片机,对马丁代克信息进行采集、处理计算;1602LCD液晶显示屏[3],显示单片机处理的深度、速度、转向、开关等信息;包括5V直流电源、pcb板电路及电器元件。
马丁代克传感器为增量式光电编码器,是通过光电转换将从输出轴上机械几何位移量转换成数字量或脉冲的传感器,也是现阶段使用最多的传感器[4]。光电编码器是由带有通光孔的光栅盘和能够检测光电信号的装置构成,光电编码器的光栅盘是在一定尺寸的圆形板上等值设置相应数量的长方形孔。因为光电码盘和马丁代克测井仪的从动轮同轴,当从动轮进行旋转时,光栅盘和从动轮等速旋转,经过发光二极管等电子元件组成的检测装置进行检测并输出相应的脉冲信号[5-6],即TTL方波,其原理示意图如图3所示。
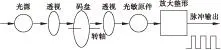
图3 马丁代克原理示意图
图4为增量式编码器波形示意图,当码盘沿转轴顺时针转动时,AB两通道产生脉冲信号,B通道脉冲提前A通道脉冲90°;当码盘沿转轴逆时针转动时,AB两通道产生脉冲信号,A通道脉冲提前B通道脉冲90°;通过AB信号的相位差,可以得到码盘的旋转方向,从而得到实际应用中是下放过程还是上提过程。
对A或者B的脉冲数量计数,与旋转盘的周长等数据计算,便可以得到下方的长度。如图4所示,光电码盘每一周发N个脉冲,绞盘周长度为C,操作过程中脉冲总数K,则可以计算出下方(或上提)长度L=(K/N)·C,下放(或上提)速度V则可用下放时间T和下放长度L计算得出V=L/T。

图4 增量式编码器波形示意图
2光电编码器接口电路的设计
设计中的传感器为TTL电平脉冲输出,考虑到导线的线损,外界干扰等因素,设计中采用电压比较器LM393对传感器输出的TTL信号进行整形。LM393是一种双电压比较器组成的集成电路。电路中R5、R6、D5、D6、D7、D8用于保护电路不受静电损坏。R9、C9、R10、C10作为高频脉冲的滤波器,消除高频干扰。电压比较器的负向输入端接参考电压,参考电压由电阻R17、R18分压得到,约2.7V,可以消除电缆上线损电压造成的电压幅值减小。因LM393为漏极开路门输出模式,因此需要外接上拉电阻R23、R24提供高电平。C19、C20可以滤除高频噪声,图5为光电码盘信号接口电路。
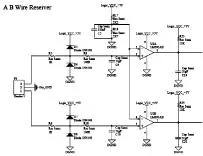
图5 光电码盘信号接口电路
3马丁代克旋转鉴向
由于可能会对设备进行上提或下放,单片机系统需对马丁代克信号进行鉴向,本设计采用两个单片机,一个进行鉴向,另一个进行测深、测速。判断方式如下,A通道进入低电平瞬间,检测B通道电平记作bz1,A通道进入高电平瞬间,检测B通道电平记作bz2,判断bz1、bz2,当(bz2=0)&&(bz1=1)正向旋转,单片机输出高电平;(bz2=1)&&(bz1=0)为反向旋转,单片机输出低电平。
4单片机对速度与深度的处理
单片机计数采用单片机内部计数器T1进行计数,计数采用长整形,首先程序初始化,打开T1外部计数器,内部定时器,定时5ms,TH0=(65536-5000)/256,TL0=(65536-5000)/256,中断100次后,定时时间到0.5s,T1计数器将计数值赋予长整型计数值“f”。速度V=f×100/2048×2;然后判断是在上提还是下放过程,若下放过程中,深度L=f×100/2048+L;若处于上提过程中,先判断是否L>f×100/2048,若成立,则L=L-f×100/2048,否则L=0。
5现场实验
试验现场分别对井号荣108、坨38-32、马702c三口井进行测井,检测射孔数目的同时,验证井下定位系统定位的准确性。
实验时间:2014年5月19日
(1)试验地点:辽河油田荣108号油井。
井型为直井,井深1362.3m;井段顶界1357.40m,射孔底界1362.30m,射开厚度1.60m。
(2) 试验地点:辽河油田坨38-32号油井。
井型为直井,井深2191.20m;井段顶界2188.40m,射孔底界2191.20m,射开厚度2.80m。
(3)试验地点:辽河油田马702c号油井。
井型为直井,井深2301.8m;井段顶界2296.90m,射孔底界2301.80m,射开厚度23.3m。
表1为测井系统测试结果数据表。
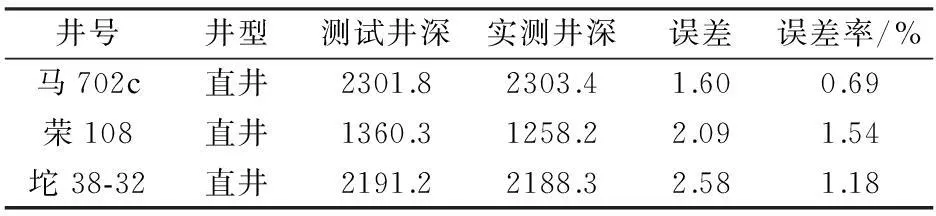
表1 测井系统测试结果数据表
从表1测试结果可以看出,测井系统深度误差最大2.58m,符合井下切割设备精度要求,测试结果合格。
6结束语
本文对切割设备深度定位进行了方案的设计,能过解决连续油管切割设备的精确定位,通过液晶显示屏能够显示设备的深度、上行及下放速度等信息,便于井上人员的操作。在现场实验中,证实测深效果真实有效,能够满足切割作业深度定位要求。
参考文献:
[1]贺会群.连续油管技术与装备发展综述[J].石油机械,2006(1):1-683.
[2]王志远,赵胜英,赵利,等.防喷器领域的最新进展[J].石油机械,2005(3):71-72.
[3] 张翾.浅谈1602液晶屏的使用[N].电子报,2006-07-23(15).
[4]李军,蔡风波,唐振欢.马丁代克编码器深度系统改造[J].石油仪器,2007(6):92-94.
[5]韦凤.浅谈光电编码器的应用[J].科技风,2014(6):97.
[6]骆洪涛,常云,郭小勇.编码器的原理及应用[C]//中国金属学会炼铁分会中小高炉学术委员会.2007年中小高炉炼铁学术年会论文集.沈阳:中国金属学会炼铁分会中小高炉学术委员会,2007:2.
(责任编辑:马金发)
Investigation on to the Position Depth of Downhole Tube Cutting Equipment
YAN Jiachao1,YANG Junhai1,XU Zhongdi1,CHEN Fengbo2,CHEN Zhen2,WANG Xiaoqiang2
(1.Shenyang Ligong University,Shenyang 110159,China; 2.CNPC Greatwall Drilling Compang,Panjin 124000,China)
Abstract:Ultilizing Martin Dyck Logging Tool to position depth of downhole tube cutting equipment,converting displacement of depth into TTL level pulse signal which SCM can identify,SCM being used to analyze and calculate data,meanwhile via LCD displaying downhole information like depth,speed and so forth,then simulating by using simulation software called proteus to testify accuracy of Logging System.
Key words:depth positioning;TTL level;preteus software simulation;Marion Dyck
中图分类号:TE933+.8
文献标志码:A
文章编号:1003-1251(2016)01-0014-03
作者简介:闫家超(1964—),男,副教授,研究方向:信息、机械及自动化。
收稿日期:2014-09-05
