基于CMOS 面阵的道岔缺口定位监测研究
2016-05-08钟志旺陈建译
钟志旺,陈建译
(北京交通大学 电子信息工程学院, 北京 100044)
近年来,我国高速铁路正处于快速发展时期,并逐步进入网络化运营阶段,在社会经济发展中起到了重要作用。道岔是高速铁路系统最重要的线路连接设备。转辙机是道岔控制系统的执行机构,用于转换和锁闭道岔。道岔转换装置中,道岔缺口承担检查道岔尖轨密贴程度的功能, 保证尖轨与基本轨的密贴数值满足线路行车要求,给出道岔表示,实现联锁逻辑,保证列车安全通过。
随着列车运行速度的提高,列车运行对道岔的冲击越来越大,特别是高速化、公交化运营模式的线路,受高速运行的列车轮对冲击的影响,道岔的各种组件会产生松动和偏移,造成尖轨密贴的变化,其直接反映到转辙机内部的表示缺口产生变化。缺口偏移过大,会导致检查柱无法落下,道岔不能锁闭,进而无法排列进路,严重影响行车安全和运输效率。因此,对高速铁路道岔缺口的监测、维护和调整要求也越来越高。
一直以来,我国铁路为了保证包括转辙机在内的线路设备正常使用,采用定期维护保养的方式。这种维修模式下,不同使用频度的转辙机采用相同时间间隔进行维修保养,使得维修资源得不到合理分配。同时,缺乏对转辙机当前状态的实时监测,难以获取转辙机缺口变化趋势,难以有针对性地对道岔及转辙机进行调整,以便及时消除隐患,导致道岔故障后再组织抢修,影响行车安全与效率。
随着科技的进步,道岔缺口监测技术逐步得到应用发展,尤其是基于图像的道岔缺口监测方法得到了应用和推广。传统的基于图像的道岔缺口检测的最大优势是监测结果直观,但因常见的图像识别算法需要强大的计算能力,在转辙机内难以完成缺口(或缺口标记)图像的识别分析,需要借助传输通道上传图像至监测主机,且需要高速率的传输通道才能保证系统的测量精度和信息更新速率。同时大量的图像数据传输和处理导致转辙机内无法提供实时无延迟的缺口值显示,以及道岔转辙机表示缺口的精细化调整工具。另外,直拍缺口图像模式易受油污、背景光照灯影响,导致基于固定阈值的图像分析失败,产生误报。
因此,如何提高缺口图像监控的实时处理能力,降低图像算法的计算复杂度,提高图像处理算法的自适性和鲁棒性,成为道岔缺口监测需要解决的主要问题。
目前,国内外学者在CMOS面阵图像处理、图像边界检测方面做了大量的研究工作。文献[1-8]对面阵探测系统的扫描成像方式和图像处理方式进行了研究。文献[9-13]介绍了铁路道岔监测方式和运用案例。但是针对高速铁路道岔缺口检测这一具体问题,目前仍没有一种合适的具有低计算复杂度、适应不同噪声和图像对比度的边界检测算法。
针对上述问题,本文提出了借鉴信息理论的香农熵的概念,提出基于香农熵的自适应阈值图像边界分割算法,利用现场采集的图像数据进行实验和对比分析,证明了本文所提算法在CMOS面阵的道岔缺口定位检测的有效性。
1 CMOS面阵的道岔缺口定位监测架构
使用CMOS面阵的道岔缺口定位检测架构如图1所示,整个架构分为4个部分。
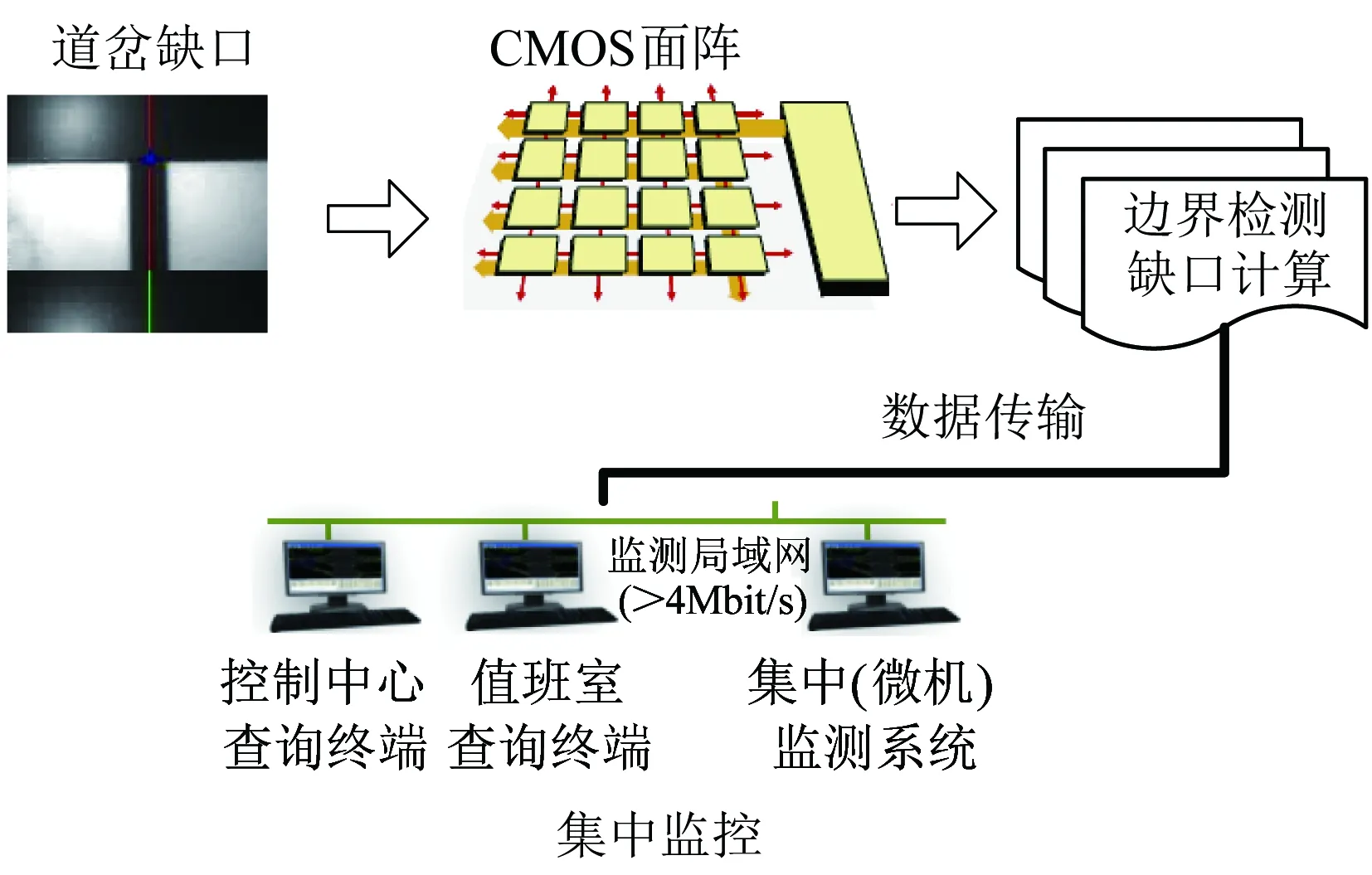
图1 高铁道岔缺口监测架构
第一部分为CMOS面阵对道岔缺口的图像采集。其基本原理为:图像传感器安装于接点架中部,由采集分机控制其拍摄下方表示杆上的缺口标记。缺口标记为中部带黑条的白底即时贴,如图2所示。CMOS面阵的缺口感知如图3所示。
图2 缺口标记
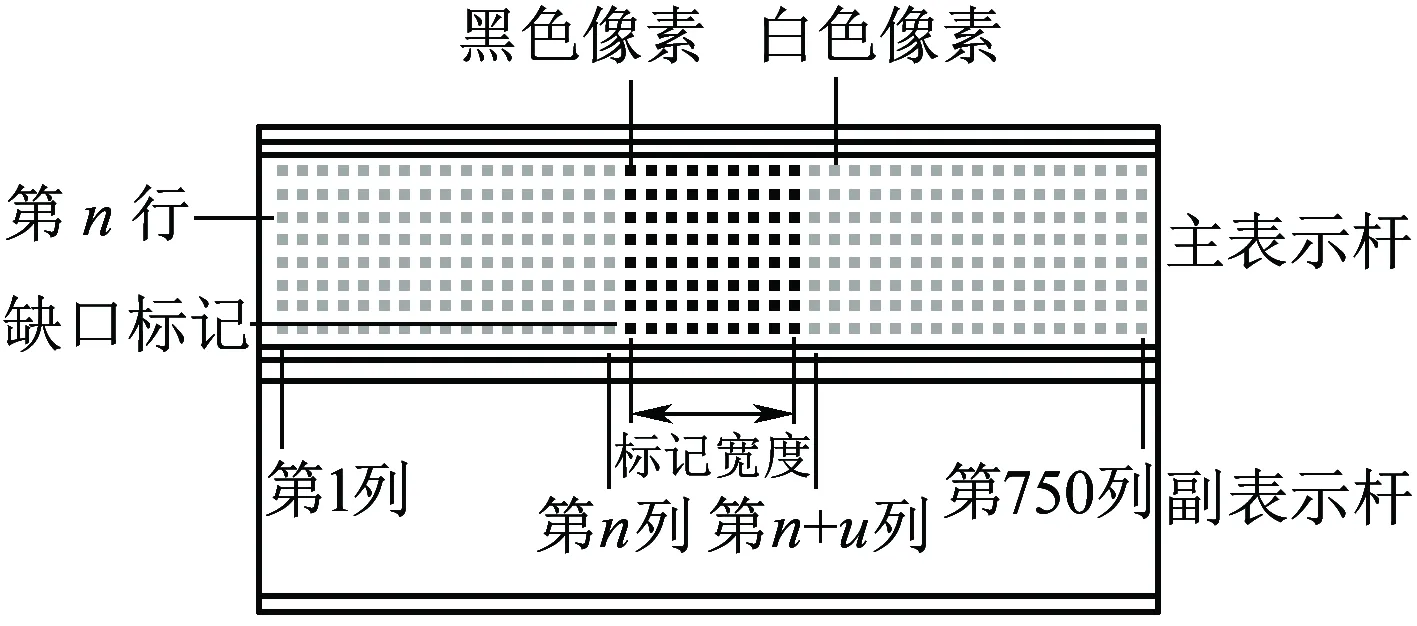
图3 CMOS 面阵定位测量原理
第二部分为前端的图像处理和边界检测。要求边界检测算法具有较低的计算复杂度,能够适应单片机的计算能力,同时免受外界环境,例如灰度变化或外界噪声的影响。
第三部分为边界检测结果的传输部分。使用CAN总线完成缺口检测结果的传输。
第四部分为集中监控。接收缺口检测结果,存储到数据库,利用后台软件提取数据库内容进行显示,绘制日报和月报缺口检测结果,为道岔设备的健康监控和状态维修提供重要信息。
2 基于香农熵的自适应阈值道岔缺口监测
具有低计算复杂度、适应单片机计算要求的可靠图像边界检测算法是整个系统的关键环节之一。
2.1 数学模型
CMOS面阵的成像物理模型可以表示为下述线性模型。
Yij(n)=aij(n)Xij(n)+bij(n)+Nij(n)
(1)
式中:aij(n)为位于(i,j)位置n时刻的乘性噪声;Xij(n)为目标的入射光强;bij(n)为外界环境变化的光强;Nij(n)为CMOS传感器单元的热噪声或非均匀噪声。考虑到乘性噪声aij(n)在CMOS图像中表现的并不突出,本文假定无乘性噪声的影响,从而得到简化后的CMOS成像数学模型为
Yij(n)=Xij(n)+bij(n)+Nij(n)
(2)
2.2 自适应阈值图像边界识别算法
在图像边界识别中,最通用的分割方法为基于阈值的图像分割。但考虑到外界环境光线变化等因素的影响,传统的固定灰度阈值分割方法会导致边界检测的误警或虚警。因此,研究自适应的灰度阈值求解对于提高CMOS图像边界检测的准确度和可靠性具有重要作用。
2.2.1 基于熵的自适应阈值选择算法
考虑到道岔缺口图像的简单性,本文提出基于香农熵的自动阈值求解算法,提出噪声环境下的自适应阈值图像边界识别算法,适用于单片机计算能力的自适应阈值检测。
(3)
图像可以分解为相互独立的背景图像A和缺口标志目标图像B,选取灰度阈值t,则上述分布可以分解为目标(类A)和背景(类B)的概率分布,其对应的公式为
pA:p1,p2,…,pt
pB:pt+1,pt+2,…,pk
这里
(4)
对于统计独立的系统,香农熵具有加性特性,即
(5)
最佳阈值t*为

(6)
式中:pi为图像灰度级t对应的概率分布。
为了减低计算复杂度, 将lnpi在x=0.2,0.4,0.6,0.8,1.0点利用下述泰勒级数展开。
(7)
x选择和pi距离最近的值,例如当pi=0.15时,x=0.2。这样只需要预先存储ln0.2=-1.609,ln0.4=-0.916,ln0.6=-0.511和ln0.8=-0.223即可,为了进一步提高精度,可以进行更为细致的划分。
具体自适应图像分割阈值算法参见算法1,步骤1表示输入CMOS采集的灰度图像;步骤2计算不同灰度象素的概率,即实现式(4)、式(5)的计算;步骤3完成式(6)、式(7)的计算,求取最佳分割阈值。
算法1:基于香农熵的自适应阈值算法Adapt Thresh
输入:M行N列灰度图像A
输出:最佳阈值t*
开始
1.令Y(i,j)为图像A在像素(i,j)处的灰度值,i=1,…,M,j=1,…,N;
2.计算每一灰度级的概率分布;
For allt∈{0,1,…,255}
应用式(5)计算S(A+B);
3.应用式(6)求解最佳阈值t*
结束
2.2.2 CMOS面阵图像边界识别算法
算法2给出CMOS面阵图像边界识别算法。步骤1根据得到的最佳阈值生成二进制图像;步骤2判断图像边界;步骤3完成道岔缺口的检测和计算。
算法2:基于自适应阈值的边界检测算法Entropy
输入:M行N列灰度图像A,最佳阈值t*
输出:边界检测图像E
开始
1.生成二进制图像:
ifY(i,j)≤t*
E(i,j)=0
else
E(i,j)=1
end
2.计算边界:
if (Y(:,i)-Y(:,i+1)==1)&&
(Y(:,i)-Y(:,i+2)==1)
边界1=i;
if (Y(:,i+a+1)-Y(:,i+a)==1)&&
(Y(:,i+a+2)-Y(:,i+a)==1)
边界2=i+a;
3.道岔中心刻度=[(i+a)+i]/2
结束
3 实验结果
3.1 评价指标
评价边界检测的指标是虚警概率、定位误差和计算复杂度。下面主要给出道岔缺口检测中前两个指标的数学定义。
为了考察道岔缺口检测中边界分割的误报概率,考虑CMOS面阵感知的缺口标志边界为直线,为简单起见,定义虚警概率为虚报的边界数量与检测边界数量的比值。即
虚警率=(检测边界总数-正确边界数量)/检测边界数量
另一个重要的指标是定位精确度,也就是图像处理后的边界和实际缺口标志边界的误差,即
定位误差=实际位置-估计位置
本文的边界检测算法均使用上述两个指标对算法的性能进行评估。
3.2 实验数据
文中使用的故障数据来自京广铁路长沙站实验现场数据。系统设定测量分辨率不低于0.05 mm,量程大于±15 mm,选取CMOS传感器像素为750×480,镜头焦距为3.6 mm,安装至转辙机后的实际拍摄范围为36 mm×23.7 mm,等效像素宽度为0.048 mm。采集图像总数为50帧。考虑到采集不同对比度和噪声环境下的图像费时且较为困难,这里的数据分析通过对原始图像对比度调整和加入不同方差的高斯白噪声模拟上述环境,从而比较算法在不同对比度和信噪比下的性能。
3.3 算法性能比较
表1为5种边界检测算法在5种不同图像对比度下的误警率。其中,Sobel、Canny、Prewitt、Robert为经典的图像处理算法,Entropy为本文提出的基于香农熵的自适应阈值边界检测算法。
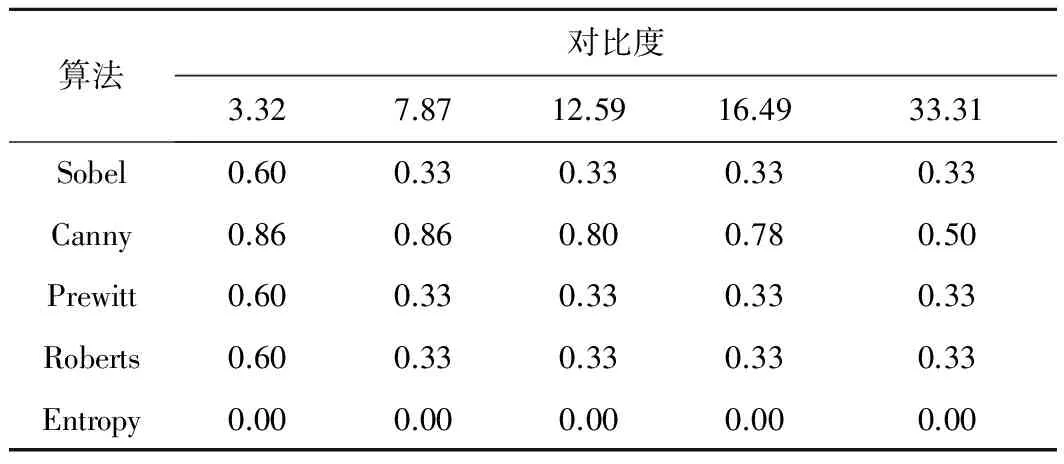
表1 不同对比度下算法的误警率
从表1可以看出,随着图像对比度的降低,前4种算法的误报率随之上升,但本文提出的基于香农熵的自适应阈值算法对灰度变化不敏感,这主要源于自适应的灰度阈值选择,使之能够根据图像的对比度自动调整边界分割的阈值,从而免受图像对比度变化的干扰。
图4为对比度为7.87时不同算法的边界检测结果,可以看出,Canny算法受到过多的细节干扰,给出了较多的虚警结果,Sobel、Prewitt和Roberts均给出了一条错误的边界检测结果,而本文提出的算法给出了正确的边界检测结果。
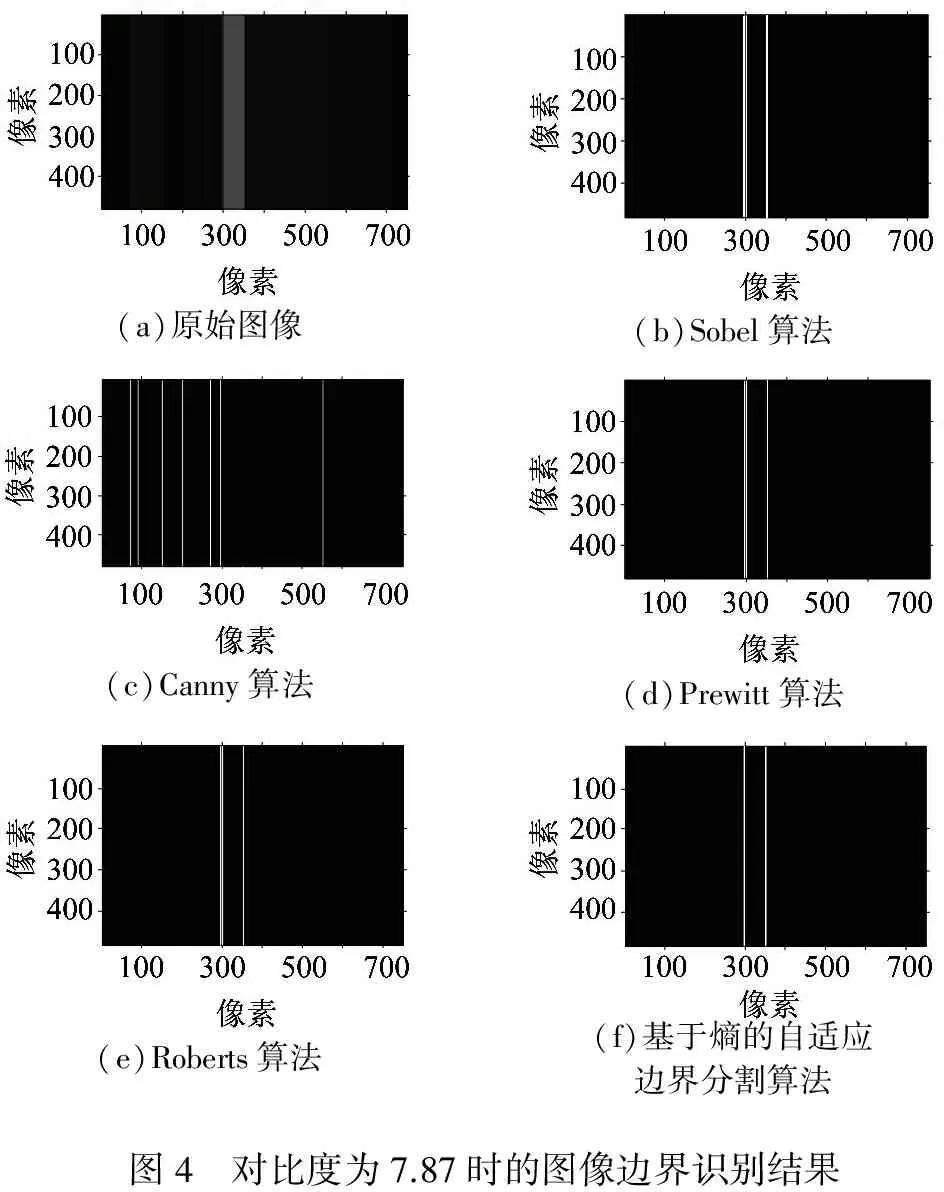
(a)原始图像(b)Sobel算法(c)Canny算法(d)Prewitt算法(e)Roberts算法(f)基于熵的自适应边界分割算法图4 对比度为7.87时的图像边界识别结果
为了研究边界检测算法在不同信噪比下的性能,表2和表3分别给出了上述5种边界检测算法在不同信噪比、不同对比度下的定位误差。NA表示无法适用信噪比图像,即算法失效。可以看出,Canny算法的结果最不理想,主要由于噪声图像干扰了该算法,导致检测结果出现大量细节,使真正的检测标志边界淹没在大量的细节之中,无法给出正确的边界检测结果。而本文提出的方法在图像去噪后进行检测,在不同的信噪比和图像对比度下得到了较好的检测结果。
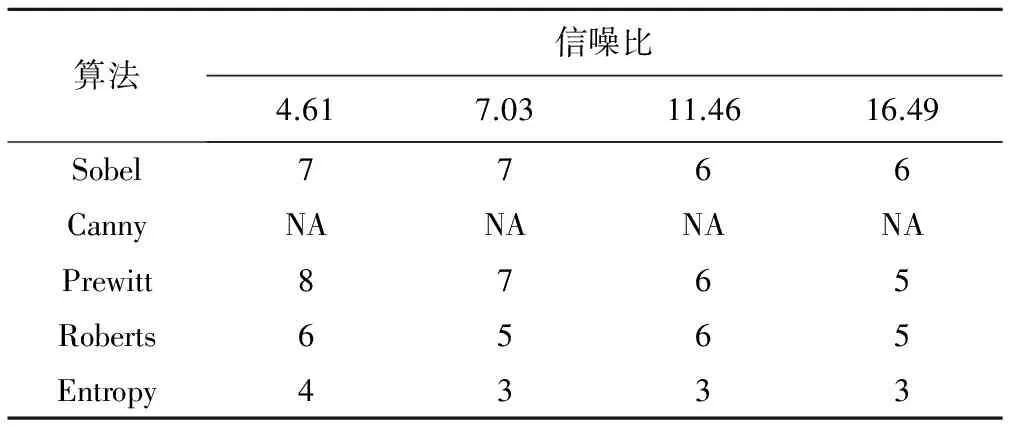
表2 不同信噪比下的定位误差(对比度=8.14)
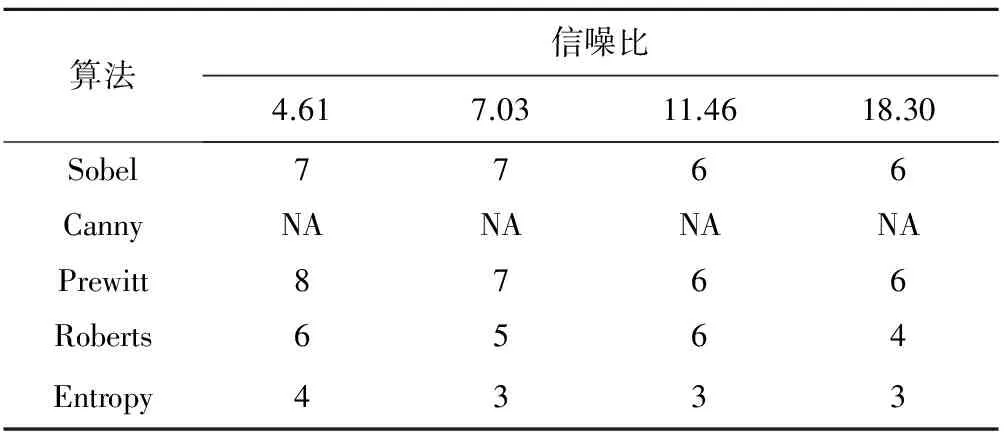
表3 不同信噪比下的定位误差(对比度=16.50)
图5为道岔缺口现场实测图像及其处理结果。可以看出,本文提出的基于信息熵(Entropy)的分割算法处理效果优于其他传统算法,进一步验证了算法的有效性。
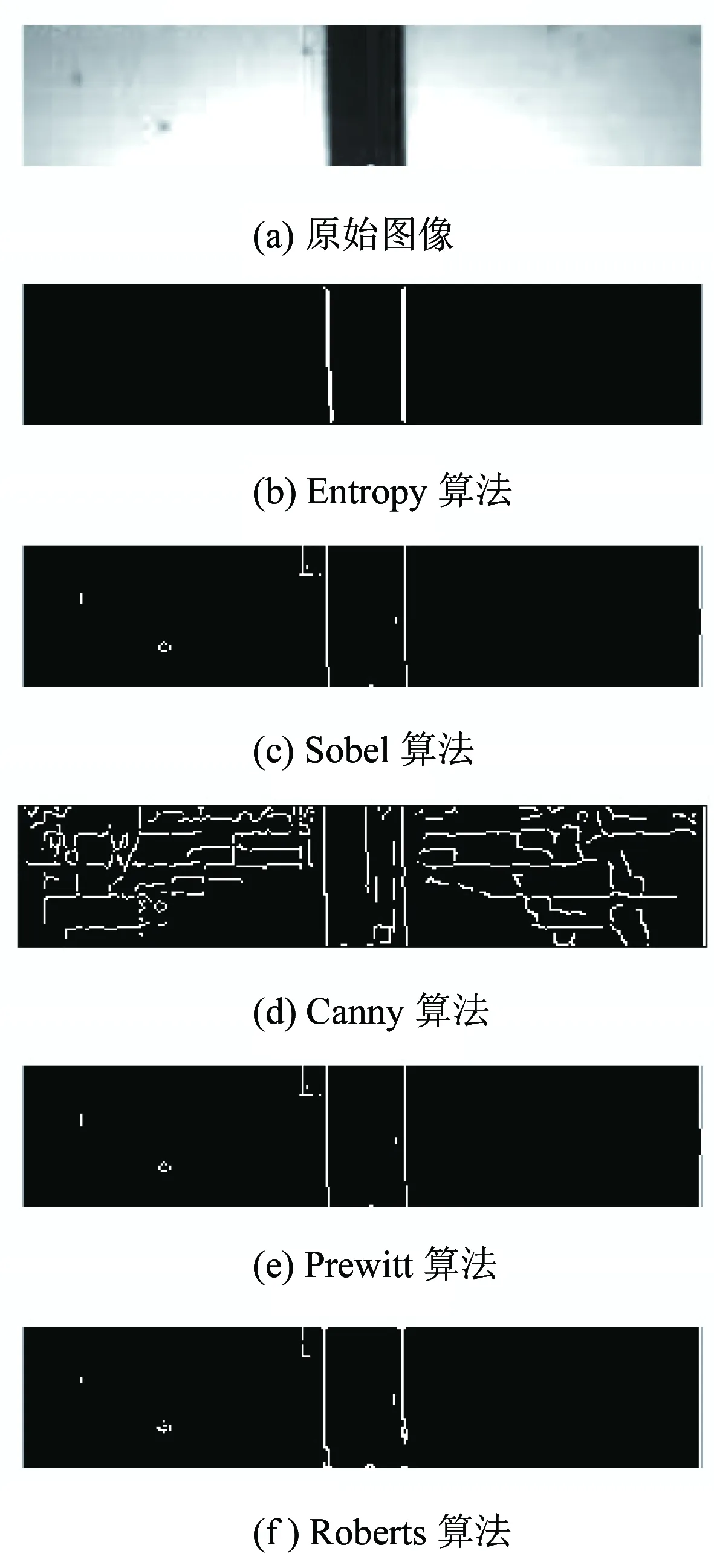
图5 现场道岔缺口的检测结果
关于算法的计算复杂度,由于本文提出的基于香农熵的自适应阈值图像分割算法仅涉及简单的加减乘除运算,比较适合单片机的执行,满足实际的计算需要。
4 结束语
针对高速铁路道岔缺口监控问题,本文提出了基于CMOS面阵的道岔缺口监控方案。利用信息熵理论,结合最优化方法,提出基于香农熵的自适应阈值CMOS图像边界分割算法。利用京广铁路长沙站采集的图像数据,对图像分割算法进行比较分析,验证了自适应阈值边界分割算法具有较低的计算复杂度,能够适应单片机的计算要求。同时本文所提算法能够在图像对比度变化和不同的噪声环境下表现出较好的性能。对基于CMOS面阵的道岔缺口监控方案中的数据传输方法做进一步研究,将是后续需要解决的关键问题。
参考文献:
[1]杨育周,张双垒,龚学艺,等.基于面阵探测系统的扫描成像信息获取方式研究[J].红外技术,2014,36(6):479-484.
YANG Yuzhou,ZHANG Shuanglei,GONG Xueyi,et al. Research of Scanning Imaging Method with Focal Plane Array [J]. Infrared Technology, 2014, 36(6):479-484.
[2]李晓晨,姚素英,黄碧珍,等.一种应用于高动态范围CMOS图像传感器的曝光控制技术[J].传感技术学报,2013,26(3):328-332.
LI Xiaochen, YAO Suying, HUANG Bizhen,et al. A Novel High Dynamic Range Exposure Control for CMOS Image Sensor [J]. Chinese Journal of Sensors and Actuators, 2013, 26(3):328-332.
[3]袁高斌,李斌桥,徐江涛,等.时间延迟积分型面阵CMOS图像传感器MTF速度失配模型研究[J].光学学报, 2013, 33(1):1-7.
YUAN Gaobin, LI Binqiao, XU Jiangtao, et al. Research of MTF Velocity Mismatch Model for Time Delay Integration CMOS Area Image Sensors [J]. Acta Optica Sinica, 2013, 33(1):1-7.
[4]于帅,孙德新.基于CMOS图像传感器的高速小型化成像系统设计[J].红外,2014,35(3):7-11.
YU Shuai, SUN Dexin. Design of High-speed and Small-size Imaging System Based on CMOS Image Sensor [J]. Infrared, 2014, 35(3):7-11.
[5]姚洪涛,李晓宇,陈磊,等.CMOS图像传感器的图像采集系统的研究与实现[J].电子设计工程,2015,23(5):137-139.
YAO Hongtao, LI Xiaoyu, CHEN Lei, et al. Research and Implementation of Image Acquisition System of CMOS Image Sensor [J]. International Electronic Elements, 2015, 23(5): 137-139.
[6]何春良,李斌桥,刘振旺,等.TDI CMOS图像传感器曝光时间优化方法研究[J].光学学报,2015,35(2):26-32.
HE Chunliang, LI Binqiao, LIU Zhenwang, et al. Integration Time Optimization for TDI CMOS Image Senor [J]. Acta Optica Sinica, 2015, 35(2):26-32.
[7]FAN S K S, LINA Y. A Multi-level Thresholding Approach Using a Hybrid Optimal Estimation Algorithm [J]. Pattern Recognition Letters, 2007, 28(5):662-669.
[8]YIN P Y. Multilevel Minimum Cross Entropy Threshold Selection Based on Particle Swarm Optimization [J]. Applied Mathematics and Computation, 2007, 184(2): 503-513.
[9]曹均平.高速铁路道岔监测系统现场监测单元的设计与实现[D].成都:西南交通大学,2004.
[10]王军.高速铁路道岔智能监测系统的研发[D].兰州:兰州交通大学,2013.
[11]张炜.基于数据挖掘的微机监测系统故障诊断研究[D].兰州:兰州交通大学,2010.
[12]何涛,范多旺,魏宗寿.计算机联锁全电子三相交流转辙机控制模块[J].铁道学报, 2011, 33(4):80-83.
HE Tao, FAN Duowang, WEI Zongshou. All-electronic Control Module of Computer Interlocking System of Three-phase AC Switches [J]. Journal of the China Railway Society, 2011, 33(4):80-83.
[13]赵林海,陆桥. 基于灰关联的道岔故障诊断方法[J]. 铁道学报,2014,36(2):69-74.
ZHAO Linhai, LU Qiao. Method of Turnout Fault Diagnosis Based on Grey Correlation Analysis [J]. Journal of the China Railway Society, 2011, 33(4):69-74.