软刚臂监测的设计验证
2016-04-26樊哲良王延林岳前进孙晔靳扬
樊哲良, 王延林, 岳前进, 孙晔, 靳扬
(1. 大连理工大学 海洋科学与技术学院,辽宁 盘锦124221;2. 大连理工大学 工业装备结构分析国家重点实验室,辽宁 大连 116023; 3中航工业金城南京机电液压工程研究中心 计量测试部,江苏 南京 211102)
软刚臂监测的设计验证
樊哲良1,2, 王延林1, 岳前进1,2, 孙晔3, 靳扬2
(1. 大连理工大学 海洋科学与技术学院,辽宁 盘锦124221;2. 大连理工大学 工业装备结构分析国家重点实验室,辽宁 大连 116023; 3中航工业金城南京机电液压工程研究中心 计量测试部,江苏 南京 211102)
摘要:为了探究浅水软刚臂在运行中的工作机理,根据软刚臂系泊浮体在役期间的失效模式确定监测信息,并设计了监测方案。基于C++研发了集成分析系统,获得了长期连续的数据。通过监测系统内的冗余数据,对FPSO浮体运动响应和系泊力测量系统进行了评价,验证了监测系统的正确性。该监测系统可为软刚臂在役期间提供实时的安全保障,测得的信息又可为软刚臂设计提供参考。
关键词:软刚臂;失效模式;监测系统;设计验证;安全保障
渤海海域的大多数油田为边际油田,采用全海式开发模式,即采用浮式生产储油卸油装置(floating production storage and offloading, FPSO),将开采的石油直接外输,避免了投资巨大的管道铺设。在这种开发模式中,如何将FPSO固定是一个挑战性的问题。由于渤海水深较浅并且冬季存在浮冰,人们提出了软刚臂系泊定位的概念。理论上,软刚臂的力学概念简单,即在浮体与固定平台间采用一个A字架机构,下段悬吊一个压载舱,当机构两端产生水平位移时,通过提升压载舱来实现水平刚度的目的。软刚臂通过多个铰接解除了约束,可以实现只在一个方向有刚度,其他方向刚度为零,满足了船形FPSO的单点系泊的需要。此外,可以将整个软刚度悬挂在水面以上,避开了浮冰的作用。
尽管在的设计阶段,模型试验和有限元分析起到了十分重要的作用[1-3],但软刚臂是由多个铰接的多刚体机构,这些铰节点在实际使用中承受巨大的应力,增加了结构的风险性;同时,软刚臂由于解除了多个方向的约束,使重块与悬臂形成了一个摆,当浮体的运动周期与摆的周期比较接近时,就会引起共振现象;此外,由于浅水效应与环境荷载的复杂性存在,近些年来,现役的FPSO已发生多起软刚臂系泊失效的事故。因此,有必要对软刚臂系泊这种概念形式进行一步的研究。对于陆上结构的健康监测已有成熟的应用[4-5],但由于海洋环境恶劣、结构运动复杂及现场监测成本高等难点,国内外开展的海洋平台监测实例并不很多,对于FPSO监测而言,监测对象也多为深远海FPSO[6-8],而对于渤海海域常见的、采用软刚臂单点定位的FPSO的现场监测仍鲜有报道。
为了探究浅水软刚臂在实际运行中的工作机理,通过对软刚臂失效分析,构建了包括环境荷载监测系统、浮体响应监测系统、软刚臂受力姿态监测系统以及铰节点监测系统在内的软刚臂全测量系统,利用先进的测量手段获得了完备的监测数据。最后通过测量冗余数据的分析,验证了监测系统的正确性。
1软刚臂系泊系统
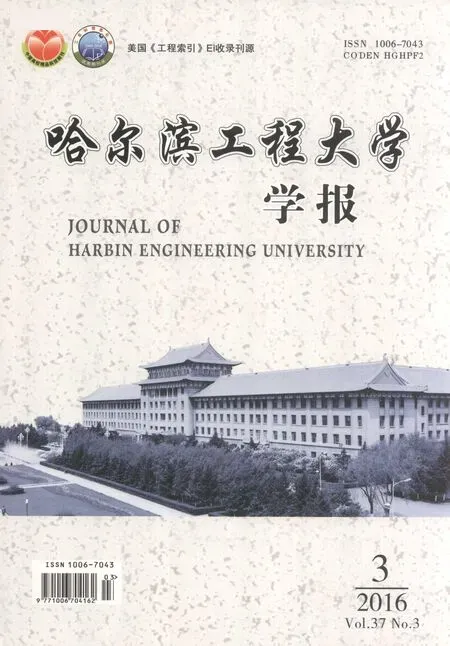
水上软刚臂单点系泊系统主要由单点平台、系泊臂、压载舱、系泊腿和系泊支架等组成(见图1)。X1与X2两个铰节点将系泊支架、系泊腿与系泊臂依次相连接,系泊臂另一端X3与单点平台的滑环X4相连接,使得单点系泊的船型浮体在环境作用下具有风标效应,处于合外力最小的位置。同时,软刚臂具有13个铰节点,如表1所示,X、Y、Z为铰节点在该方向的线位移,Rx、Ry、Rz为铰节点在该方向的角位移。这些铰节点能够释放浮体3个波频量的自由度运动(横摇、纵摇、升沉),而约束包括横荡、纵荡、艏摇在内的3个低频量自由度运动,使浮体定位于某一固定海域。此外,水上软刚臂不受海冰的干扰,适合冰区海洋工程装备的使用[9]。
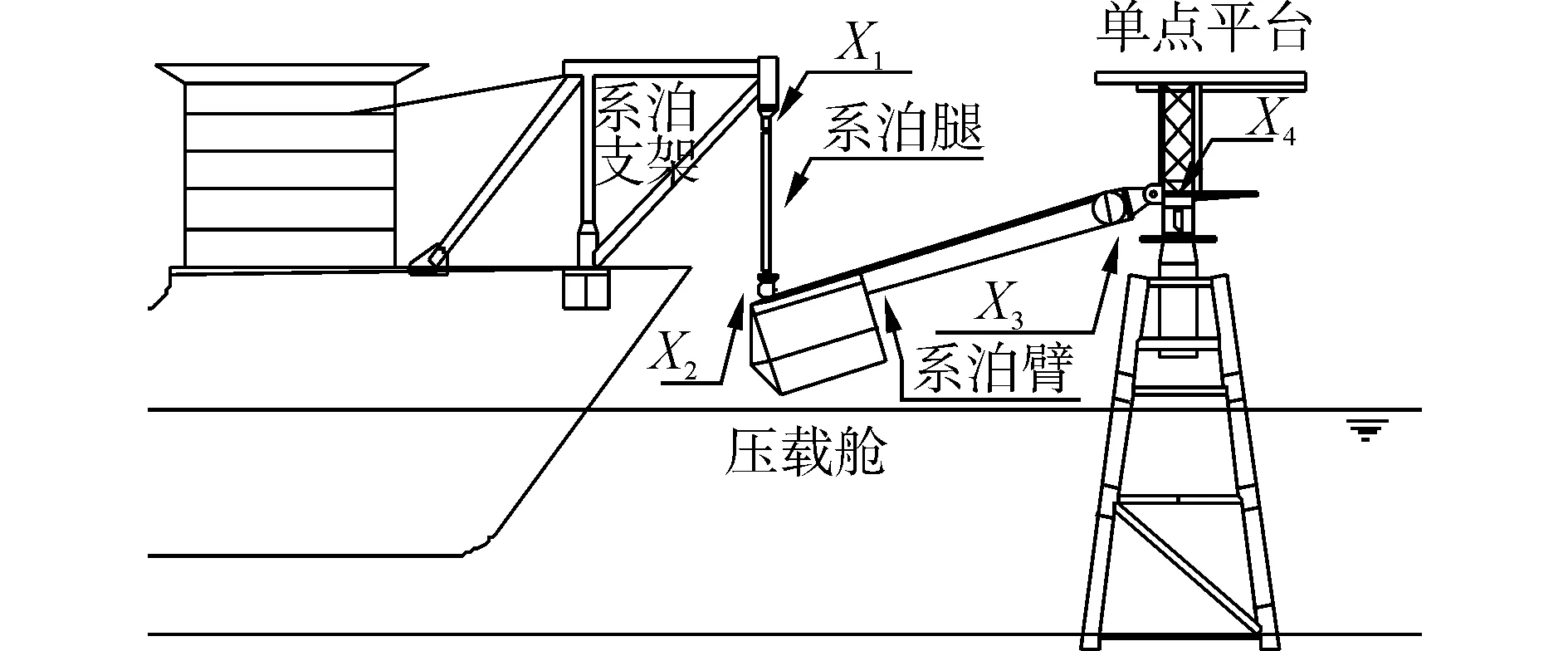
图1 软刚臂系泊系统Fig. 1 Soft yoke mooring system

铰节点每个接点的自由度XYZRxRyRzX1(两组)×××√√√X2(两组)×××√√×X3×××√√×X4×××××√
在理论上,软刚臂系泊系统是一种顺应式结构,通过压载舱重量的大小来调整系泊刚度,一旦压载舱的重量以及重心位置确定,风、浪、流所产生的漂移力和偏离平衡位置的位移也一一确定。然而,荷载的估计不足与软刚臂设计的缺陷仍然造成了许多问题。总体来说,主要存在着如下三种失效模式:1)极端抗力失效。如2009年秋,渤海的海洋石油113 FPSO在持续环境荷载作用下将单点平台拉倒,险些与其他平台相撞造成更为严重的事故。2)软刚臂的疲劳失效。一方面是由于软刚臂横摆现象造成的铰节点破坏,另一方面长期在外界荷载作用下可能造成的疲劳裂纹损伤。3)功能域上的失效,这种失效往往由于系泊结构的不合理,如1994年明珠FPSO由于软刚臂横荡而引起的压载舱与船艏相撞[10]。同时,一旦存在铰节点锈死而不能运动自如的情况,也可能造成整个软刚臂的失效。
2现场原形测量系统设计
基于以上的失效模式,确定了软刚臂的监测信息,并设计了监测方案,方案包括以下几个子系统:环境荷载监测系统、浮体响应监测系统、系泊系统受力姿态监测系统及铰节点监测系统。另外还安装了视频监测设备,主要监测浮体与压载舱之间是否会发生碰撞、是否会发生横摆现象以及外部环境的整体变化情况。目前该套监测系统已经成功运用到了明珠、友谊和海洋石油102这3条FPSO上。由于3条FPSO无论是在外型、系泊形式和尺寸上均大体相同,因此以明珠号为例,该FPSO长为217.7 m,水线长为210.0 m,满载吃水和压载吃水分别为11.7 m和8.33 m。系泊系统中,系泊臂长为32 m,系泊臂质量为229 820 kg,系泊腿为13 m,系泊腿质量为46 380 kg,压载舱质量为310 000 kg。
2.1坐标系定义
为了描述该浮体的自由度信息和环境方向,首先定义了2个坐标系:
1) 大地坐标系。大地坐标系固定于单点平台的正中心,x轴为纬线方向,正向指向正东;y轴为经线方向,正向指向正北。大地坐标系能够描述环境荷载的真实方向以及船艏向;
2) 随船坐标系。随船坐标系的原点位于FPSO的中心处,主要描述FPSO 6个自由度的运动信息情况。同时将环境荷载的绝对方向与FPSO艏向进行差值运算,能够得到相对浮体的环境方向信息。
2.2环境荷载监测系统
软刚臂的环境测量首先要选择宽敞开阔处,同时还应考虑到监测工作开展的便利以及平台作业的安全要求。此外,在实际监测时,风、浪、流传感器并不能将环境全部的测量,如风的梯度等,只能将得到的环境特征值来间接的反映真实的海况。最后,如何将有限的环境参数荷载化也是在数据处理时需要考虑的内容。
2.2.1风要素监测
在描述风荷载对海上结构物作用时,通常用2种方式来评估它影响[11]:一种为定常风,即在考虑风荷载的影响时,速度和方向均为恒定的值;另一种是非定常风,海洋工程中常用Davenport、API、NPD等风谱来描述非定常风场的特性。在实际测量中,为了避免周围建筑对测量风的影响,布设在了FPSO顶端开阔处。同时采用机械式风速仪,设定采集频率为1 Hz,以满足风荷载的分析要求。对于软刚臂的监测,侧重分析风荷载方向对软刚臂的影响,因此可将相对风向作为风速监测的主要内容,绝对风向信息可由结合船艏向监测方法来得到。
2.2.2浪流要素监测
声学多普勒流速剖面仪(acoustic Doppler current profilers,ADCP)是测量波浪和海流的主要传感器。单点系泊FPSO由于受到风标效应,一直处于旋转之中而没有合适的安装地点,只能将传感器安装于相距1.1 km远处的井口平台上。ADCP传感器放置于水深15 m处,波浪海流数据通过信号缆传送至该平台监控主机,可实时显示海浪与海流的相关信息(见图2)。此外,还在该平台布设了水上声学波浪仪作为海浪监测的冗余。

图2 波浪测量设备及实测参数曲线Fig. 2 Equipment and parameter curves of wave and current in actual measurement
2.3 浮体响应监测系统
为了研究浮体运行中的一些特殊现象以及分析浮体运动对软刚臂的影响,需要对浮体的自由度进行监测。在常见的水池实验与数值模拟中通常把船体分解成6个自由度运动,如图3所示。由于单点系泊浮体不停的围绕着固定点旋转,因此不考虑横荡运动的作用。

图3 浮体的6个自由度Fig. 3 Six degrees of freedom in the FPSO
纵荡的测量,由于在现场实测试验的特殊性,不能使用室内模型试验的常规测试方法。在实际测量中运用了实时载波相位动态差分测量技术(real-time kinematic,RTK)。将GPS移动站和固定站布置于FPSO生活楼和单点平台的两侧,在RTK作业模式下可给出厘米级精度的处理结果。
对于横摇、纵摇以及艏向的测量,选用基于GPS技术的惯性导航系统(inertial navigation system,INS)。将2个GPS天线沿着浮体方向布置于生活楼甲板上,通过2个GPS的基线长度以及GPS测量的精确位置,能够解算出基线与地理北的夹角,进而能够获得船艏向。同时,INS内装有陀螺、加速度计、高速微处理器等多个传感器,可实时解算出浮体的纵摇角与横摇角。
升沉的测量,主要参考RTK移动站相对于固定平台高度变化。由于RTK移动站在FPSO的前端,FPSO中心处高度变化可由下式得到
(1)
式中:η1为RTK移动站相对高度的变化,η2为浮体纵摇值,L为RTK移动站到浮体中心的水平距离。
艏摇的测量,是指浮体的船艏向与软刚臂方向之间的相对夹角。由于船艏向与软刚臂的轴线方向均可以由INS和RTK来测得,在分析艏摇角时,可以实时作差计算出两者之间的夹角,具体见图4。

图4 相对艏摇监测系统示意图Fig. 4 The diagram of yaw monitoring system
2.4软刚臂受力及姿态监测系统
系泊系统测力方法已经在深水锚链式结构中开展了广泛的研究[12]。对于在役的软刚臂系泊浮体,无法通过停产串连力传感器的方式,来直接测量软刚臂水平系泊力[13]。由于系泊腿是二力杆,可沿着系泊腿长度方向分别焊接4个光栅光纤(fibre bragg gratings,FBG)应变传感器,并在下方分别焊接FBG温度传感器作为温度的补偿,如图5所示。在设计时软刚臂水平恢复力是主要的设计指标,由于传感器仅测量系泊腿的轴向应变,在每个系泊腿的下端还装有倾角仪,用以实现水平系泊力的测量。
此外,通过在系泊臂和系泊腿各安装2组倾角仪,基于多体动力学的kane法[14],可对软刚臂系泊力进行间接的实时动力计算,以作为测量水平系泊力的冗余。此外,倾角仪内部装有两个方向的传感器,在测量水平系泊力的同时可对软刚臂横向方向进行实时的监控,进而研究软刚臂姿态的变化。

图5 FBG应变传感器Fig. 5 Fibre bragg gratings strain sensors
2.5铰节点监测系统
此外,软刚臂铰节点是系泊设计中关注的问题。一旦铰节点破坏,将面临整个软刚臂系统的失效。在友谊号FPSO的长期监测中,发现由于长时间服役,左侧系泊腿上铰节点存在摩擦,而导致内部钢体轴向旋转困难的现象。由于摩擦的存在,一方面造成巨大的声响,严重影响了平台工作人员的工作生活;另一方面,易造成钢体结构的磨损、疲劳等现象,加速软刚臂的损坏;最后,由于这种现象的出现,使得功能域失效也成为了关注的焦点。
在前期的监测系统基础上,在友谊号系泊腿的上铰节点处又增加了摄像头、应变片和激光位移传感器,从视频监控、钢体应变及位移变化(高度、缝隙)3个角度用来长期评估上铰节点摩擦带来的影响,所有增加的设备之前在实验室都进行了测试[15]。这里不再赘述。
3数据采集与集成技术
通过实时汇集现场的监测数据,能够得到浮体的激励信息和响应信息,进而对软刚臂及其系泊浮体进行分析评价。海洋监测与陆地监测相比,潮湿、腐蚀、低温等环境是因素布放传感器是主要考虑的环境因素。同时,大多数传感器都属带电设备,需要有防爆装置,并应远离油气生产设施。此外,对于FPSO自身的设备,每种传感器(FBG应变传感器除外)通过自存储采集器和串口服务器,以相同的频率方式将数据传入到工控机内;对于不在FPSO的ADCP设备,数据信息则通过中海油内部网络自动传回到FPSO工控机内。FPSO工控机上装有独自研发的C++系统,可以做到集成显示。最后,陆地上的主机通过虚拟专用网络(virtual private network,VPN)与海上工控机相连,便于工作人员观测海上动态的同时,又能够实现对海上数据的实时操作(如图6、7所示)。
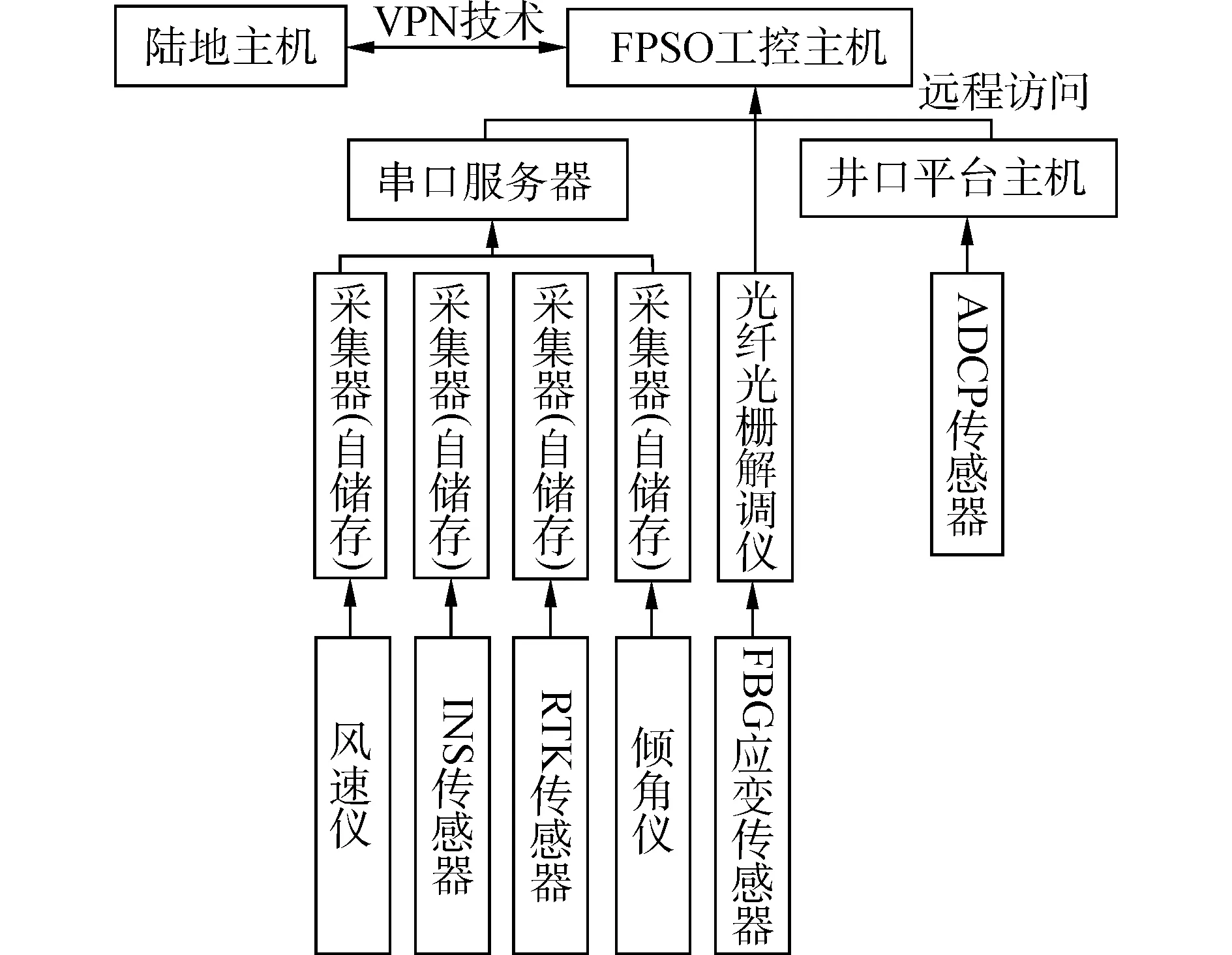
图6 集成监测系统示意图Fig. 6 The diagram of the simultaneous monitoring system
4基于实测的原型测量系统验证
自2010年6月起,该套系统先后在渤海明珠号、渤海友谊号和海洋石油102上3个FPSO开展了5年的监测,获取了长期连续的数据,为原型测量系统验证成为了可能。其中,风、浪、流、摄像头等传感器属标准设备,有自己的精度范围。结合现有监测系统设备情况,在分析评价时仅需对FPSO浮体运动响应及系泊力测量分析系统进行相互验证。
4.1浮体运动响应系统验证评价
基于RTK模式的GPS在测量浮体运动时,易受两个天线之间的位置及基线长度的影响,同时也可能受到雷雨、电离层等的干扰。为验证RTK测量纵荡与升沉运动的准确性,可将RTK测到的船体纵荡升沉数据与用倾角仪反算数据相对比,如图8所示(图中,倾角仪测量的纵荡与升沉运动可由已知的系泊腿与系泊臂长度来得到,如2.3节所示)。可以看出,用RTK实时测得数据,与利用倾角仪解算出的数据大致相同,两者误差在厘米级,符合浮体自由度测量的要求。

图7 测量点在FPSO上的示意图Fig. 7 Layout diagram of measuring point in the FPSO
图8 GPS测距与几何换算距离对比Fig. 8 Comparison of distance curves from the GPS and geometric conversion

图9 横/纵摇实测响应与理论响应对比Fig. 9 Comparison of roll/pitch curves from the measured response data and theoretical response data
浮体的幅值响应算子(response amplitude operator,RAO)是船舶与海洋平台等浮体重要的动态特性,利用波浪谱乘以RAO来分析浮体的运动响应:
(2)
式中:Sξ(ω)为风浪等不规则随机扰动的输入谱密度;Sy(ω)为浮体相应的输出谱密度。分析中选取波浪相对于船艏向为22.5°的实测谱, RAO为该浮体在对应吃水下的设计值。将两者乘积后得到的理论谱密度,与采用INS传感器得到的实测谱密度相对比,如图9所示。结果表明,实测值在频率和幅值与理论值比较接近,虽然存在一定的频率偏差和波动量,但主要由复杂的现场环境引起,验证了监测系统的正确性。
4.2系泊力测量系统验证评价
由于系泊腿每个轴向FBG应变传感器均可表示该系泊腿应变大小,在分析时每个系泊腿的4个轴向传感器均可做平均处理[13]。通过获取五年多来在不同位移下的水平系泊力数据,绘制出实测软刚臂刚度曲线,并与理论刚度曲线相对比,如图10所示,两者基本吻合。并选取了监测中两种典型的工况对监测系统的水平系泊力冗余量进行分析(工况1为温和工况,工况2为恶劣工况,见图11),FBG应变传感器与基于Kane动力法的倾角仪在数值上趋势基本一致。将系泊力处理程序嵌套到C++软件中,便于作业者直观了解系泊力情况,进而掌握生产是否安全。

图10 系泊系统刚度曲线Fig. 10 Stiffness curve of the soft yoke mooring system

图11 水平系泊力监测数据对比Fig. 11 Comparison of force curves from inclinometers and Fibre Bragg gratings strain sensors
5结论
1)根据软刚臂系泊FPSO的失效模式,构建了包括环境荷载测量系统、浮体运动响应测量系统、系泊系统受力和姿态测量系统、铰节点测量系统在内的原型测量系统,在此基础上开发了C++集成软件,便于作业者全面了解软刚臂系泊FPSO的安全性;
2)监测系统的正确性由以下两个部分得到了验证:将实测波谱乘以设计RAO计算得到的浮体横纵摇谱与INS测量相对比,倾角仪测量浮体纵荡和升沉与基于RTK作业模式的GPS测量相对比,验证了FPSO浮体运动响应测量系统的正确性;软刚臂理论刚度曲线与FBG应变传感器测量相对比,倾角仪间接测量得到的水平力与FBG应变传感器测量相对比,验证了系泊力测量系统的正确性。
渤海明珠号、渤海友谊号和海洋石油102的三艘FPSO现场监测,是我国首次针对软刚臂全面的实测研究,研究的成果既可为软刚臂在役期间的风险控制提供实时安全保障,又可为新软刚臂设计提供参考,具有较高的应用前景。
参考文献:
[1]NACIRI M, POLDERVAART L. Design aspects of SPM LNG terminals in shallow water[C]//Offshore technology conference. Huston, Texas, USA: Offshore Technology Conference, 2004: OTC-16715-MS.
[2]DUGGAL A S, LIU Y H A, HEYL C N. Global analysis of shallow water FPSOs[C]//Offshore technology conference. Huston, Texas, USA: Offshore Technology Conference, 2004: OTC-16720-MS.
[3]ZOU J. Global dynamic responses of FPSOs in shallow waters[C]//Proceedings of the 6th international offshore and polar engineering conference. San Francisco, California, USA: The International Society of Offshore and Polar Engineers, 2006: 166-172.
[4]李宏男, 高东伟, 伊廷华. 土木工程结构健康监测系统的研究状况与进展[J]. 力学进展, 2008, 38(2): 151-166.
LI Hongnan, GAO Dongwei, YI Tinghua. Advances in structural health monitoring systems in civil engineering[J]. Advances in Mechanics, 2008, 38(2): 151-166.
[5]KWON K, FRANGOPOL D M. Bridge fatigue reliability assessment using probability density functions of equivalent stress range based on field monitoring data[J]. International journal of fatigue, 2010, 32(8): 1221-1232.
[6]VAN DEN BOOM H, KONING J, AALBERTS P. Offshore monitoring; Real world data for design, engineering, and operation[C]//Offshore technology conference. Huston, Texas, USA: Offshore Technology Conference, 2005: OTC-17172-MS.
[7]VAN DIJK R R T, QUINIOU-RAMUS V, LE-MARECHAL G. 2003. Comparison of full-scale measurements with calculated motion characteristics of a West of Africa FPSO[C]//Proceedings of OMAE 2003 22nd international conference on offshore mechanics and arctic engineering. Cancun, Mexico: American society of mechanical engineers, 2003: 335-339.
[8]魏跃峰, 杨建民, 陈刚, 等. FPSO运动实测数据统计研究——"南海奋进号"FPSO实船测量研究Ⅰ[J]. 海洋工程, 2011, 29(3): 96-101.
WEI Yuefeng, YANG Jianmin, CHEN Gang, et al. Long-term statistics research on the motion performance of "Nanhai Fenjin" FPSO based on full scale measurement data[J]. The ocean engineering, 2011, 29(3): 96-101.
[9]樊哲良, 武文华, 孙晔, 等. 浅水软刚臂监测系统的设计、实施与验证[C]//2014年第三届中国海洋工程技术年会论文集. 宁波: 中国造船工程学会, 2014: 144-155.
[10]王依群. 减小海上浮式生产储油船与软钢臂系泊装置振动及相对运动措施的探讨[J]. 世界地震工程, 1998, 14(3): 54-57.
WANG Yiqun. Research on reduction of vibration and relative motion between EASU and SPM system[J]. World information on earthquake engineering, 1998, 14(3): 54-57.
[11]API. Recommended Practice 2SK, design and analysis of station keeping systems for floating structures[S]. 3rd ed. American petroleum institute, 2005.
[12]DU Yu, WU Wenhua, YUE Qianjin. Method for tensile measurement of stud-less mooring chain[J]. Advanced materials research, 2013, 718-720: 703-708.
[13]樊哲良, 岳前进, 武文华, 等. 软刚臂系泊系统水平系泊力原型测量方法[J]. 上海交通大学学报, 2014, 48(4): 475-481, 487.
FAN Zheliang, YUE Qianjin, WU Wenhua, et al. Prototype measurement methods for horizontal mooring force of soft yoke mooring system[J]. Journal of Shanghai jiaotong university, 2014, 48(4): 475-481, 487.
[14]FAN Zheliang, YUE Qianjin, QI Xingbin, et al. Study on the dynamic characteristics of a soft yoke mooring system for floating production storage and offloading based on field measurements[J]. Advances in mechanical engineering, 2015, 7(4): 1-12.
[15]WANG Yanlin, FAN Zheliang, DU Yu, et al. Integrity assessment of soft yoke moored FPSO for the hinge point problems[C]//Proceedings of the 22th international offshore and polar engineering conference. Kona, Hawaii: International society of offshore and polar engineers, 2015: 1682-1689.
Design and verification of the soft yoke mooring system
FAN Zheliang1,2, WANG Yanlin1, YUE Qianjin1,2, SUN Ye3, JIN Yang2
(1. School of Ocean Science and Technology, Dalian University of Technology, Panjin 124221, China; 2. State Key Laboratory of Structural Analysis for Industrial Equipment, Dalian University of Technology, Dalian 116023, China; 3. Nanjing Engineering Institute of Aircraft System, Jincheng, AVIC, Nanjing 211102, China)
Abstract:In order to explore the fundamental mechanism of the soft yoke mooring system (SYM) in shallow water, we determined the monitoring information and designed a monitoring scheme based on the failure mode of SYMs in service. We used C++ to develop an integrated analysis system and obtain long-term continuous data. We then evaluated the motion response of a floating production storage and offloading (FPSO) and the system for measuring mooring force by the redundant data of monitoring system,validating the correctness of the mooring system. Our results show that the proposed monitoring technique can provide life-cycle security for the SYM, and the obtained data can also be used as reference for the design of new SYMs.
Keywords:soft yoke; failure mode; monitoring system; design verification; security guarantee
中图分类号:U661.3
文献标志码:A
文章编号:1006-7043(2016)03-306-07
doi:10.11990/jheu.201411062
作者简介:樊哲良(1986-), 男, 工程师, 博士;通信作者:樊哲良, E-mail: fanzl@dlut.edu.cn.
基金项目:国家973计划资助项目(2011CB013705,2014CB046803);中央高校基本科研业务费专项资金资助项目(DUT14RC(3)014,DUT15TD30);创新研究群体研究基金资助项目(51221961).
收稿日期:2014-11-19.
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160111.1456.002.html
网络出版日期:2016-01-11.
岳前进(1958-), 男, 教授, 博士.