基于稀疏表示的多输入多输出雷达多目标定位
2016-04-23王彩云龚珞珞吴淑侠
王彩云 龚珞珞 吴淑侠
(1.南京航空航天大学航天学院,南京 210016;2.南京航空航天大学
电子信息工程学院,南京 210016)
基于稀疏表示的多输入多输出雷达多目标定位
王彩云1龚珞珞2吴淑侠2
(1.南京航空航天大学航天学院,南京 210016;2.南京航空航天大学
电子信息工程学院,南京 210016)
摘要针对双基地多输入多输出(Multiple-Input Multiple-Output,MIMO)雷达目标定位问题,提出一种基于稀疏表示的双基地MIMO雷达多目标定位方法.利用点目标所在的二维角度空间构造冗余字典;通过对接收信号的协方差矩阵进行特征分解,从中选取不同数目的特征向量在该冗余字典下稀疏表示,构建以特征向量为观测信号的多重测量向量(Multiple Measurement Vectors,MMV)模型,提取的特征向量在充分包含目标的角度信息的前提下,降低了直接以接收信号为观测信号的矩阵维数,形成低维稀疏线性模型;最后,通过特征向量的稀疏重构,得到目标的角度估计. 与现有算法相比,该算法对特征向量的稀疏重构降低了重构原始接受信号的计算复杂度,且在低信噪比和低快拍下仍有较好的估计性能,仿真实验验证了算法的有效性.
关键词双基地MIMO雷达;多目标定位;角度估计;稀疏表示;特征向量
DOI10.13443/j.cjors.2015020601
Multi-target localization for MIMO radar based on sparse representation
WANG Caiyun1GONG Luoluo2WU Shuxia2
(1.CollegeofAstronautics,NanjingUniversityofAeronautics&Astronautics,Nanjing210016,China;2.CollegeofElectronicandInformationEngineering,NanjingUniversityofAeronautics&Astronautics,Nanjing210016,China)
AbstractA new method is proposed for the multi-target localization of bistatic multiple-input multiple- output(MIMO) radar based on the sparse representation. Firstly, a redundant dictionary is built based on the two-dimensional scene where the targets locate. Then, a given number of eigenvectors as observation signals obtained from the covariance matrix of array received signals are sparsely denoted in the redundant dictionary, and constructed a multiple-measurement vectors(MMV)model, namely a low-dimensional sparse linear model which reduces the matrix dimension directly using the received signals as observation signals under the premise of containing angle information of the targets. Finally, angle estimation is obtained by the sparse recovery algorithm. Compared with the existing algorithm, the proposed algorithm reduces the computational complexity of directly reconstructing the original signals and performs well even under low SNR and low snapshots. The simulation results verify that the proposed method is effective.
Keywords bistatic MIMO radar; multi-target localization; angle estimation; sparse representation; eigenvectors
引言
多输入多输出(Multiple Input Multiple Output,MIMO)雷达是一种新体制雷达,其采用多发多收体制增加了有效通道,使得MIMO雷达相对于传统雷达有更强的参数估计能力,更高的系统分辨率,近年来受到人们的广泛关注[1-5].
在双基地MIMO雷达系统的研究中,目标的发射角(Direction of Department,DOD)和接收角(Direction of Arrival,DOA)的估计问题是参数估计的主要内容. 双基地MIMO雷达测角方法主要分两类:第一类是经典的谱估计方法. 如文献[4]在文献[3]的基础上提出一种改进的降维Capon算法,文献[5]和文献[6]分别利用求根多重信号分类(Multiple Signal Classification, MUSIC)算法和降维的MUSIC算法实现DOD和DOA的联合估计;以及利用旋转不变子空间的子空间旋转不变技术(Estimating Signal Parameters via Rotational Invariance Techniques, ESPRIT)算法[7-8]. 然而,经典算法需要足够的信号累积,因此在低快拍下的性能较差. 第二类为基于压缩感知和稀疏表示理论的角度估计方法. 近年来,压缩感知和稀疏表示理论被引入雷达信号处理领域,为参数估计提供了一种新方法. 该类算法根据空间目标的稀疏性,建立线性稀疏模型,然后利用多重测量向量(Multiple Measurement Vectors, MMV)问题的求解算法得到目标的角度信息. 其中,文献[9]利用收发阵列流型的Kronecker积构造过完备字典,将接收信号转化为MMV形式,然后通过联合0范数逼近方法求解稀疏系数. 文献[10]则分别利用发射和接收信号的协方差矩阵得到稀疏线性模型,构造1-2混合范数优化目标函数,然后通过交替迭代寻优方法定位目标. MMV模型的求解算法[11]主要包括:基于混合范数的凸优化算法,如MFOCUSS算法[12-13]、JLZA算法[14];贪婪算法,如多重正交匹配追踪(Multiple Orthogonal Matching Pursuit,MOMP)算法[15];时间结构算法等. 文献[9]和文献[10]均使用凸优化算法来求解MMV问题,然而凸优化算法的缺点在于运算量过大,尤其当快拍数增加时,计算复杂度将急剧增大.
针对上述问题,提出了一种基于稀疏表示的收发角度联合估计算法. 该算法将点目标存在的二维角度空间离散化,构造过完备字典;然后对接收信号的协方差矩阵进行特征分解,取特定的特征向量,在相同的过完备字典下构造相对低维的稀疏线性模型;最后通过贪婪算法中的MOMP算法求解稀疏系数,实现目标的角度估计. 仿真实验进一步验证了算法的有效性.
1双基地MIMO雷达信号模型
假设双基地均匀线阵MIMO雷达系统(如图1),发射和接收阵列间距分别为dt、dr,为保证各个接收信号之间不产生分辨模糊,接收阵元间距应满足半波长条件,即dr≤λ/2. 由N个发射天线同时发射Q个正交脉冲信号S∈CN×L,每个重复周期内有L个码元,单个脉冲的发射信号S表示为
S=(s1,s2,…,sN)T.
(1)
经过位于远场的P个点目标,由M个接收天线接收.

图1 双基地MIMO雷达的系统结构
假定目标的模型为Swerling CaseΠ[16],在一个脉冲重复周期内,目标的雷达散射截面积(Radar Cross-Section, RCS)恒定,且在脉冲与脉冲间的起伏统计独立. 设第p个目标的DOD和DOA为θp、φp,p=1,2,…,P,则位于(θp,φp)处的目标发射和接收阵列的导向矢量分别为:a(θp)=[1,e-j2πsin(θp)dt/λ,
…,e-j2πsin(θp)(M-1)dt/λ]T,b(φp)=[1,e-j2πsin(φp)dr/λ,…,
e-j2πsin(φp)(N-1)dr/λ]T.
每个脉冲的采样点数即脉冲编码长度为L,在第q(q=1,2,…,Q)个脉冲下,接收信号可表示如下:
Yq=B(φ)η(q)AΤ(θ)S+Eq,Yq∈CM×L.
(2)
式中: A(θ)=[a(θ1),a(θ2), …,a(θP)]和B(φ)=[b(φ1),b(φ2), …,b(φP)]分别为发射和接收阵列的导向矢量阵; η(φ)=diag(η1,q,η2,q, …,ηP,q)是由P个目标的散射系数构成的对角矩阵; Eq为加性复高斯白噪声. 由于点目标相对二维空间背景的稀疏性,雷达接收信号可在二维角度空间形成的密集字典下稀疏表示,那么对目标DOD和DOA的估计则转化为对接收信号的稀疏重建,通过求解稀疏系数得到目标的角度信息.
2基于稀疏表示的多目标定位
2.1DOA-DOD的稀疏表示模型

(3)
在离散空间H1×H2个方向上,发射和接收阵列的阵列流型为
(4)

(5)
则式(2)可重新表示为

(6)
将Yq按列整理为列向量
yq=vec(Yq)

(7)
将Q个脉冲的回波信号整理成MMV形式如下:
(8)

假如直接利用稀疏系数求解算法对原始接收信号Y进行重构,解决式(8)的MMV问题,则矩阵运算的维数过大,计算复杂度较高.
2.2特征分解及降维
为了降低求解的复杂度,将接收信号协方差矩阵进行特征分解,取特定的特征向量构成联合稀疏线性模型,将接收信号的稀疏重构问题转化为对特征向量的稀疏重构,MMV模型测量向量个数的减少即降低了联合稀疏重构的矩阵维数,同时特征分解的过程也抑制了噪声的影响.
2.2.1协方差矩阵的特征分解
首先,对接收信号Y∈CML×Q的协方差矩阵进行特征分解,协方差矩阵表示为
(9)

(10)
根据文献[17],当噪声分量的协方差矩阵Rnn满秩,且信号分量的协方差矩阵R的秩rank(R)≤P时,存在以下关系:

(11)
式中: uk为第k(1≤k≤P)个大的特征值对应的特征向量; xk∈RP×1为相应的系数向量,p=1, 2, …,P. 噪声信号为高斯白噪声,式(11)可表示为
(12)
(13)

2.2.2特征向量的选取及矩阵降维
选取前K(1≤K≤P)个最大特征值对应的特征向量组合表示如下:
U=[u1,u2,…,uK]=D[x1,x2,…,xK].
(14)
(15)
式中,X∈RH1H2×K为稀疏系数矩阵.

经实验验证当K=P时,所取的特征向量极大地包含了目标信息,收发角度的重构概率最高. MMV模型的矩阵规模从式(8)到式(15)变化可表示如下:
(16)
式(16)变化中稀疏线性模型的矩阵维数从ML×Q维降至ML×P维,在充分利用信号分量累积效果的基础上,降低了矩阵维数,减小了重构时的计算量.由式(8)中信号项与噪声E直接相加可知,当信噪较低时,对重构结果影响较大,而式(10)中特征分解的过程对噪声起到了一定的抑制作用.
2.3稀疏求解


(17)
利用MMV模型的稀疏求解算法,重构特征向量组U,得到稀疏系数矩阵X. 由X中非零行所在位置得到目标的收发角度信息,由于噪声及测量精度的影响,实际应用中将P个较大值所在行对应为非零行进行计算,采用MOMP算法进行稀疏系数的求解.
2.4算法的实现步骤
给出基于稀疏表示的双基地MIMO雷达多目标定位的算法流程:
2) 对接收信号Y∈CML×Q的协方差矩阵Ryy=YYH/Q进行特征分解,然后选取前P个最大的特征值对应的特征向量表示为U=[u1,u2,…,uP].

4) 最后根据式(17),由X确定目标的DOD和DOA.
3仿真实验及对比分析
在下面的仿真实验中,首先验证所提算法的有效性,接着利用文献[20]的算法,进行不同算法的性能比较;最后是算法的稳定性验证. 假设双基地均匀线阵MIMO雷达系统的发射信号为相互正交的Hadamard码,目标散射系数服从均值为1的瑞利分布,发射和接收阵列间隔为dt、dr,发射接收阵元数为N、M,快拍数为Q,周期码元数为L.
实验1算法的有效性验证
假设MIMO雷达系统的dt和dr均为半波长,M=N=8,Q=50,L=64. 存在P=3个非相关目标,处于(-10°,-15°),(20°,25°),(30°,35°),将DOD、DOA在[-90°,90°]的空间范围内以1°为间隔进行离散,形成过完备字典. 在T=200,RSN=5 dB时,图2(a)和图2(b)分别为归一化的稀疏系数谱的分布情况,图2(c)为目标DOD和DOA联合估计的星座图.
由图2可知,本文算法能够有效地重构点目标的二维方位角,实现目标DOD和DOA的联合估计.
实验2不同算法的性能比较

(a) DOD的估计结果
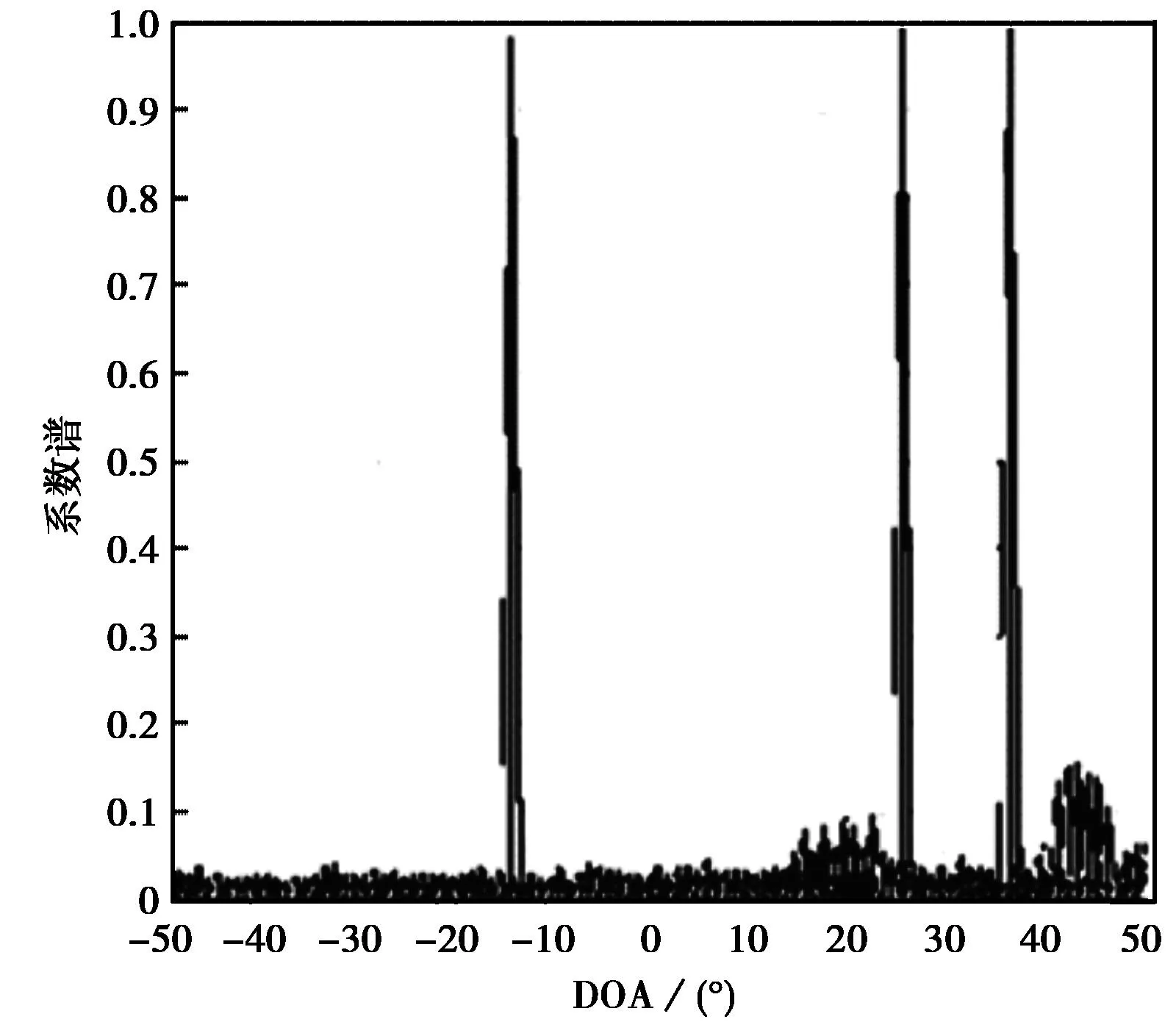
(b) DOA的估计结果

(c) DOD、DOA联合估计星座图图2 本文算法的角度估计结果
考虑双基地MIMO雷达的M=N=5,dt=dr=2.5λ(λ为波长),Q=100,L=32. 存在P=5个非相关目标,处于(15°,-25°),(25°,0°),(5°,25°),(15°,10°),(17°,12°),将DOD和DOA分别在(0°,30°)和(-30°,30°)范围内以1°为间隔离散得到过完备字典. 在T=500时,统计目标方位的正确估计次数,求解重构概率,当点目标方位的估计值与真实值的误差e=0时则为正确估计.
图3通过比较K(1≤K≤P)取不同值时点目标方位角的重构概率. 从图3可以看出,当信噪比相同时,重构概率随着所取特征值个数K(1≤K≤P)的增大而增大,且当K=5即K=P时,重构效果最佳.
图4为本文算法与文献[20]算法重构概率的比较情况.由图4可以看出,与文献[20]的解凸优化问题的算法相比,本文算法在信噪比相同时的重构概率更高. 由于特征分解的过程,抑制了噪声分量的影响,充分利用了信号分量的累积效果,在估计精度上更胜一筹.
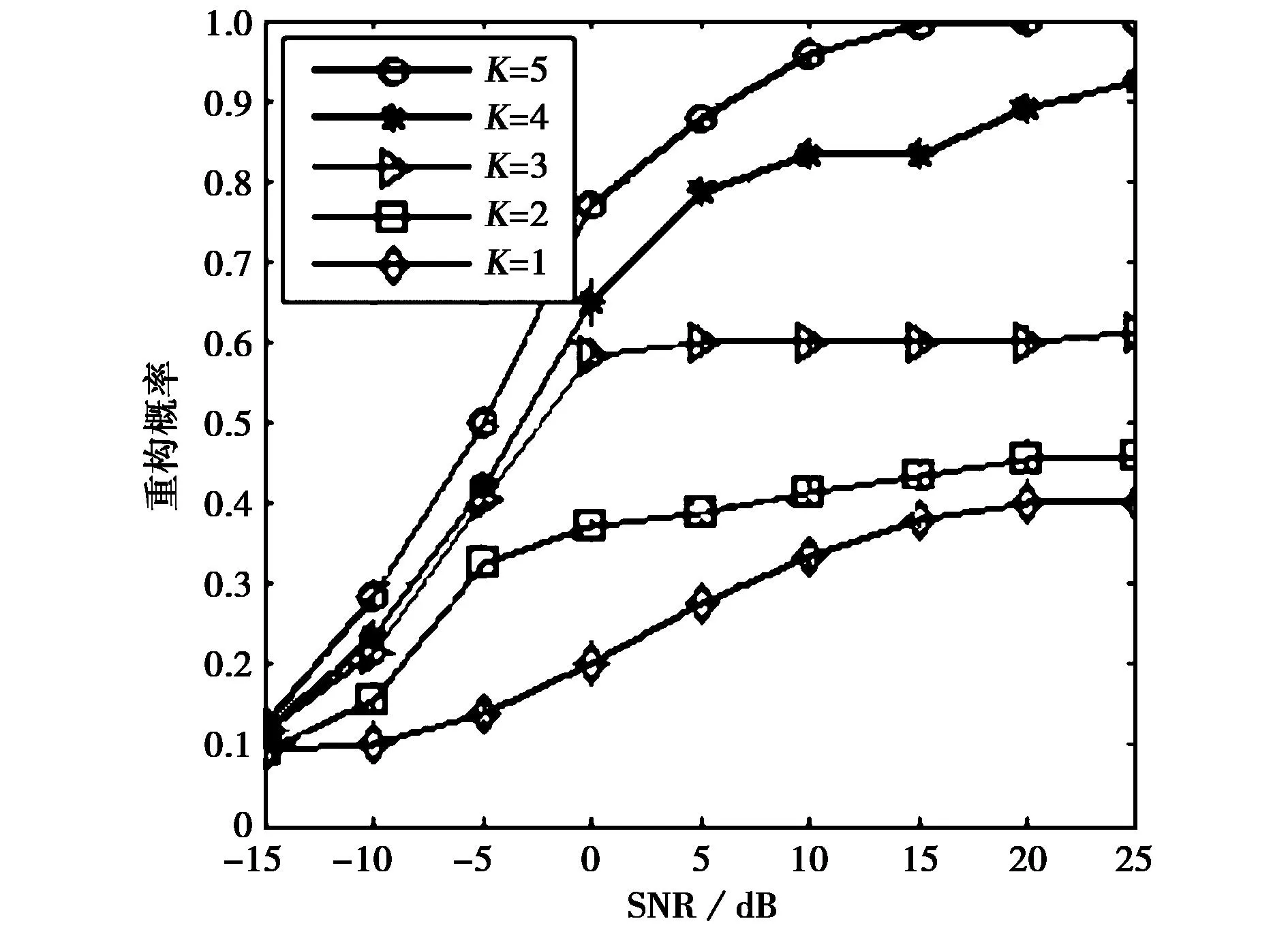
图3 K取值不同时的重构概率比较
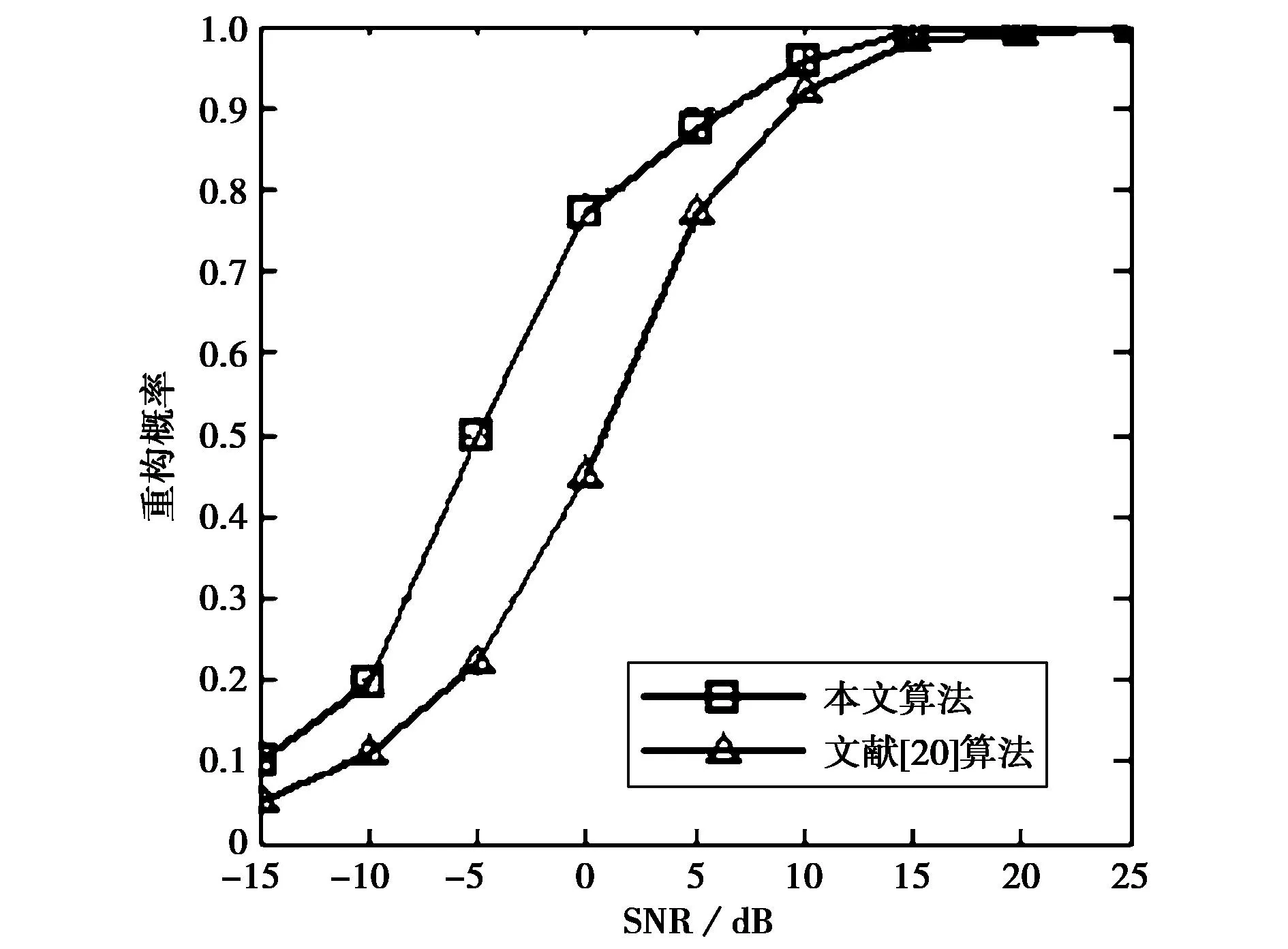
图4 重构概率随性噪比的变化
实验3算法的稳定性验证
双基地MIMO雷达的系统配置及试验参数与实验1相同,信噪比SNR在-15dB到10dB变化,在快拍数Q分别取2、5、10、20、40的情况下,比较本文算法角度估计的稳定性. 图5给出了目标在不同快拍数下随信噪比变化的RMSE曲线.
由图5可以看出,当快拍数增加时,算法的角度估计性能有所提升,且在低信噪比和低快拍数下,本文算法也能较好地工作.

(a) 在不同快拍DOD估计的RMSE随SNR的变化

(b) 在不同快拍DOA估计的RMSE随SNR的变化图5 在不同快拍下目标角度估计性能比较
4结论
提出了一种基于稀疏表示的双基地MIMO雷达多目标定位方法. 通过接收信号协方差矩阵的特征分解,将较大的特征值对应的特征向量在过完备字典下稀疏表示,充分利用了信号分量的累计效果且减小了观测向量的个数,降低了直接求解接收信号稀疏模型的计算复杂度,且特征分解的过程抑制了噪声的影响. 仿真实验验证了该方法的有效性,以及在低信噪比和低快拍下的稳定性.
参考文献
[1]FISHLERE,HAIMOVICHA,BLUMRS,etal.MIMOradar:anideawhosetimehascome[C]//IEEERadarConference.Philadelphia,April26-29, 2004: 71-78.
[2]陈显舟, 杨源, 韩静静, 等. 双基地多入多出雷达收发方位角联合估计算法[J]. 电波科学学报, 2013, 28(1):176-182.
CHENXZ,YANGY,HANJJ,etal.JointDODandDOAestimationusingpolynomialrootingforbistaticMIMOradar[J].Chinesejournalofradioscience, 2013, 28(1):176-182. (inChinese)
[3]YANHD,LIJ,LIAOGS.MultitargetidentificationandlocalizationusingbistaticMIMOradarsystems[J].EURASIPjournalonadvancesinsignalprocessing, 2008, 8(2): 1-8.
[4]ZHANGXF,XUDZ.AngleestimationinbistaticMIMOradarusingimprovedreduceddimensionCaponalgorithm[J].Journalofsystemsengineeringandelectronics, 2013, 24(1): 84-89.
[5]ZHANGXF,XULY,XUL,etal.Directionofdeparture(DOD)anddirectionofarrival(DOA)estimationinMIMOradarwithreduced-dimensionMUSIC[J].IEEEcommunicationsletters, 2010, 14(12): 1161-1163.
[6]BENCHEIKHML,WANGY,HEH.PolynomialrootfindingtechniqueforjointDOADODestimationinbistaticMIMOradar[J].SignalProcessing, 2010, 90(9): 2723-2730.
[7]CHENJL,GUH,SUWM.AngleestimationusingESPRITwithoutpairinginMIMOradar[J].Electronicsletters, 2008, 44(24): 1422-1423.
[8]FAYADY,WANGCY,HAFEZAES,etal.DirectionofarrivalestimationusingnovelESPRITmethodforlocalizationandtrackingradarsystems[C]//Proceedingsof2014 11thInternationalBhurbanConferenceonAppliedSciences&Technology(IBCAST).Islamabad,January14-18, 2014: 396-398.
[9]HYDERMM,MAHATAK.AjointsparsesignalrepresentationperspectivefortargetdetectionusingbistaticMIMOradarsystem[C]//InternationalConferenceonDigitalSignalProcessing.Corfu,July6-8, 2011: 1-5.
[10]郑志东, 张剑云, 宋靖. 基于稀疏表示的双基地MIMO雷达多目标定位及幅相误差估计[J/OL]. 航空学报.[2015-02-06]http://www.cnki.net/kcms/detail/11.1929.V.20130105.003.html.
ZHENGZD,ZHANGJY,SONGJ,etal.Localizationandestimationofgain-phaseerrorforbistaticMIMOradarbasedonsparserepresentation[J/OL].Actaaeronauticaetastronauticasinica.http://www.cnki.net/kcms/detail/11.1929.V.20130105.003.html. (inChinese)
[11]王法松, 张林让, 周宇. 压缩感知的多重测量向量模型与算法分析[J]. 信号处理, 2012, 28(6): 785-792.
WANGFS,ZHANGRL,ZHOUY.Multiplemeasurementvectorsforcompressedsensing:modelandalgorithmsanalysis[J].Signalprocessing, 2012, 28(6): 785-792. (inChinese)
[12]COTTERSF,RAOBD,ENGANK,etal.Sparsesolutionstolinearinverseproblemswithmultiplemeasurementvectors[J].IEEEtransactionsonsignalprocessing, 2005, 53(7): 2477-2488.
[13]贺亚鹏, 李洪涛, 王克让, 等. 基于压缩感知的高分辨DOA估计[J]. 宇航学报, 2011, 32(6): 1344-1349.
HEYP,LIHT,WANGKR,etal.CompressivesensingbasedhighresolutionDOAestimation[J].Journalofastronautics, 2011, 32(6): 1344-1349. (inChinese)
[14]HYDERMM,MAHATAK.Direction-of-arrivalestimationusingamixed2,0normapproximation[J].IEEEtransactionsonsignalprocessing, 2010, 58(9): 4646-4655.
[15]CHENJ,HUOXM.Theoreticalresultsonsparserepresentationsofmultiple-measurementvectors[J].IEEEtransactionsonsignalprocessing. 2006, 54(12): 4634-4643.
[16]SKOLNIKMI.Introductiontoradarsystem3E[M].NewYork:McGraw-Hill, 2001.
[17]CADZOWA,KIMS,SHIUEC.Generaldirection-of-arrivalestimation:asignalsubspaceapproach[J].IEEEtransactionsonaerospaceandelectronicsystems, 1989, 25(1): 31-47.
[18]WANGLB,CUIC,LIPF.DOAestimationusingasparselinearmodelbasedoneigenvectors[J].Journalofelectronics, 2011, 28(4): 496-502.
[19]黄传禄, 晁坤, 毛云志. 基于压缩感知的空间谱估计[J]. 电波科学学报, 2014, 29(1): 150-157.
HUANGCL,CHAOK,MAOZY.Thespatialestimationbasedoncompressivesensing[J].Chinesejournalofradioscience, 2014,29(1): 150-157. (inChinese)
[20]沈方芳, 李雅祥, 赵光辉, 等. 双基地MIMO雷达高分辨角度估计[J]. 西安电子科技大学学报:自然科学版, 2013, 40(5): 40-48.
SHENFF,LIYX,ZHAOGH,etal.HighresolutionangleestimationofbistaticMIMOradar[J].JournalofXidianUniversity, 2013, 40(5): 40-48. (inChinese)
[21]李建峰, 张小飞. 低快拍下多输入多输出雷达中的角度估计算法[J]. 电波科学学报, 2012, 27(3): 452-457.
LIJF,ZHANGXF.AngleestimationalgorithminbistaticMIMOradarunderlowsnapshots[J].Chinesejournalofradioscience, 2012, 27(3): 452-457.(inChinese)
王彩云(1975-),女,山西人,博士,副教授,主要研究方向为雷达信号处理、雷达目标检测与识别.
龚珞珞(1989-),女,湖北人,硕士研究生,主要研究方向为雷达信号处理、压缩感知.
吴淑侠(1989-),女,河北人,硕士研究生,主要研究方向为图像处理、压缩感知.
作者简介
中图分类号TN957.51
文献标志码A
文章编号1005-0388(2016)01-0061-07
收稿日期:2015-02-06
王彩云, 龚珞珞, 吴淑侠. 基于稀疏表示的多输入多输出雷达多目标定位[J]. 电波科学学报,2016,31(1):61-67. DOI: 10.13443/j.cjors.2015020601
WANG C Y, GONG L L, WU S X. Multi-target localization for MIMO radar based on sparse representation [J]. Chinese journal of radio science,2016,31(1):61-67. (in Chinese). DOI: 10.13443/j.cjors.2015020601
资助项目: 国家自然科学基金(61301211); 江苏高校优势学科建设工程资助项目
联系人: 王彩云 E-mail: wangcaiyun@nuaa.edu.cn.