Influence of strong ionospheric scintillation on GPS software receiver
2016-04-19ZHUXuefenCHENXiyuanCHENJianfeng
ZHU Xue-fen, CHEN Xi-yuan, CHEN Jian-feng
(1. School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China; 2. Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology of Ministry of Education, Southeast University,
Nanjing 210096, China; 3. Automotive Engineering Research Institute, Jiangsu University, Zhenjiang 212013, China)
Influence of strong ionospheric scintillation on GPS software receiver
ZHU Xue-fen1,2, CHEN Xi-yuan1,2, CHEN Jian-feng3
(1. School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China; 2. Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology of Ministry of Education, Southeast University,
Nanjing 210096, China; 3. Automotive Engineering Research Institute, Jiangsu University, Zhenjiang 212013, China)
Strong ionospheric scintillation may cause the signal amplitude’s deep fading and the carrier phase’s large fluctuation, which would lead to loss of lock on GPS carrier tracking loop, resulting in increased positioning error and even navigation interruption. This paper presents the software receiver processing results of GPS L1 signals undergoing strong ionosphere scintillation. The data used in this study were obtained from a multi-GNSS multi-band IF data collection system at Brazil in November 2013, which was a solar maximum year. Detailed signal acquisition and tracking algorithms and the scintillation indices are presented, which are calculated from carrier tracking loop outputs such as amplitude index S4and carrier phase index σφ. The influences of ionospheric scintillation on GPS software receiver are analyzed, which has significant value for designing the advanced tracking algorithms to improve the robustness and precision of the GPS receiver.
ionospheric scintillation; GPS software receiver; acquisition; tracking
GPS ionospheric scintillation is a kind of rapid fluctuation in its signal amplitude and phase. When GPS signal passes through the ionospheric irregularities[1-2], the ionospheric scintillation occurs. It can lead to loss of lock on GPS carrier tracking loop, result in increased positioning error and even navigation interruption. Reducing the loss of lock caused by ionospheric scintillation in order to improve the robustness of the GPS receiver is thus of significant value to both GPS manufacturers and GPS users.
Ionospheric scintillation happens frequently at low latitudes (+/- 15° geomagnetic latitude) and near the auroral oval and polar caps[3-4]. At low latitude locations, deep amplitude fading is most prevalent and severe. At high latitude locations near the auroral oval and polar caps, large phase fluctuation scintillation is more preva-lent[5]. Ionospheric scintillation is also relevant to solar cycle, meaning the number of occurrences of and intensity of ionospheric scintillation is increased during a solar maximum[6-7]year.
This paper presents results obtained from processing GPS L1 IF data collected in Barizil in November 2013, which is a solar maximum year, using a portable multi-constellation multi-frequency GNSS data collection system. The real collected GPS L1 scintillation data are processed to investigate deep amplitude fading and fast phase variations on it. The front-end generate zero IF data streams with 8 bits resolution I/Q samples at 20 MHz complex sampling rate for L1. The data is processed with a custom software defined receiver (SDR) to obtain measurements of carrier phase and signal intensity. Scintillation indices (ampli- tude index S4, carrier phase index σφand etc.) are then calculated using the results from the SDR.
The results reveal numerous deep amplitude fading and half even full cycle carrier phase changes occurring within 2600 ms with deep fades on GPS L1 signals. This research will serve to guide in the development of future GNSS (Global Navigation Satellite System) receivers and provide a greater understanding of the effect of scintillation on new GNSS signals.
The rest of the paper is organized as follows. It begins with a brief description about the ionospheric scintillation indices definition and calculation, including the S4and σφ. Section 2 introduces the design of acquisition and tracking algorithm for GPS L1 software receiver during strong ionospheric scintillations. The experiments analysis of strong ionospheric scintillation on GPS measurements are given in details in Section 3. In section 4, some conclusions are given.
1 Ionospheric scintillation indices
Several well-known GNSS signal observables are frequently used to quantitatively study the ionosphere scintillation. These observables are indicators of the level of severity of a scintillation event. The two most commonly used indicators are the amplitude fading S4index and the detrended carrier phase standard deviations σφindex. S4is the standard deviation of the detrended signal intensity which has been normalized by the average signal power and σφis the standard deviation of the detrended carrier phase. S4values typically range from 0 to ~1 with anything greater than 0.5 defined as strong scintillation[8-9].
Besides, there are other factors such as the relative receiver-satellite dynamics, oscillator induced phase jitter, and multipath interferences must be removed before the scintillation indices can be calculated. This process is known as detrending. As described informer research[10-12], there are a number of different detrending processes available such as a 6th-order high-pass Butterworth filter, polynomial fitting method, and moving averages. In this paper, the 4th order polynomial fitting method will be used for detrending S4and a 6th order high pass Butterworth filter will be used for detrending σφ.
1.1 S4index
The S4 index represents the fluctuation of signal intensity (SI). Its calculation is like following:

In the two equations above, M represents the number ofused to generate one WBP(Wide Band Power) or NBP(Narrow Band Power) measurement. A moving window accumulator is applied to the correlator outputs to coherent integration over a longer period to increase the accumulated signal energy. From the previous experiments with various accumulation time intervals[7]for GPS L1 strong scintillation signals show that 40 blocks of 1ms correlator output contain sufficient energy to produce meaningful measurements. Because the GPS navigation data rate is 50 Hz, the product of M and the coherent integration time should equal to multiples of 20 ms to avoid summation over a bit transition. So in this paper, the same interval of 40 ms is applied to GPS L1 band signal, that is, M is set as 40, whileandare integrated over 1 ms.

Where, SIrawis the raw signal intensity. SInormis the normalized signal intensity, which is generated by using SIrawdivided by its own low frequency trend SItrend. SItrendis generated using a 4th order polynomial fitting on SIraw. Amplitude scintillation induce S4is then computed from the normalized signal intensity SInorm.

where 〈 〉 represents the average value over the interval, which used in this paper is 10 s.
1.2 σφindex
Sigma Phi σφis another conventional indicator of scintillation, which represents the fluctuation of the carrier phase. Its calculation is like following:

Where, subscript k denotes time instance.φkis the carrier phase measurements recorded from the carrier generator. It is an estimation of the smooth components of the carrier phase variations induced by satellite movement and receiver clock offset, while the high frequency components due to scintillation and other sources are contained in the output of the phase discriminator. ATAN2is the coherent phase discriminator.are the in-phase and quadrature correlator outputs accumulated by the moving window. In this paper, the detrended carrier phase is then obtained by filteringthrough a conventional 6th-order Butterworth filter with a cutoff frequency of 0.1 Hz. Carrier phase scintillation induce σφis then computed from the detrended carrier phase φdetrend.

2 Acquisition and tracking algorithm
As mentioned previously, low latitude scintillation is dominated by strong amplitude fading with some moderately strong phase scintillation. During deep amplitude fading, it may be necessary to accumulate more signal energy during the integration step of signal acquisition and tracking. In this study, Brazil is a low latitude site, a maximum of 10 ms coherent integration time combined with 2 non-coherent summations was allowed in signal acquisition to accumulate signal power to compensate for the deep fades during strong scintillation.
A second-order PLL is implemented for carrier tracking. The phase error discriminator used in the PLL is a Costas discriminator:

The code tracking loop used in this study is a conventional second-order Delay Lock Loop (DLL). A normalized early minus late power envelope discriminator is employed in the DLL:

In the pull-in phase, the filter is trying to converge to the correct frequency and phase. For fast pull-in, the noise bandwidth is set larger, which implies that the tracking loop quickly locks to the real frequency but has a relatively large frequency noise in the locked state. A smaller noise bandwidth implies that it can take some time before the tracking loop can be locked to the correct frequency. So after tracking is stable, the noise bandwidth should be set smaller to reduce the noise.
In this paper, the pull-in time is set as 500 ms, the DLL pull-in noise bandwidth is set as 2 Hz while PLL pull-in noise bandwidth is set as 25 Hz for fast pull-in. When the tracking loop is stabilized, the DLL noise bandwidth is set as 1 Hz and the PLL noise bandwidth is set as 10 Hz.
3 Analysis of strong ionospheric scintillation on GPS SDR measurements
The analysis presented in this paper is based on GPS IF signal collected at the low-latitude site at Brazil on November 18th, 2013, which is a solar maximum year, the UTC time started at 0:00:01 and lasted for one hour. After acquisition of 10ms coherent integration time combined with 2 non-coherent summations was applied, 8 satellites were acquired (PRN 5, 12, 15, 18, 21, 25, 29, 31). As shown in Fig.1, green bar means the acquired signal while the blue bar means the satellite is not in the acquisition list. Also the higher the bar is, the larger correlation value it has, and its C/N0should be higher.
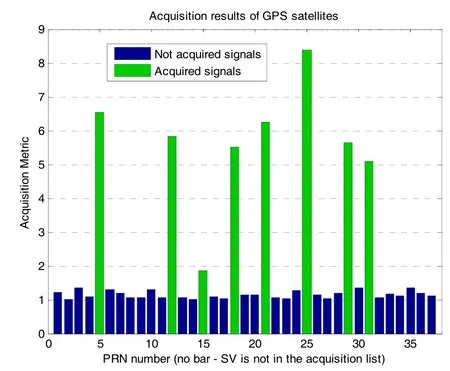
Fig.1 Acquisition results of GPS satellites
PRN25 and PRN32 were chosen as the representativesof the acquired satellites to make analysis of strong ionospheric scintillations effects. The Normalized signal intensity(SI) of GPS L1 signal of PRN25 and PRN31was plotted in Fig.2

Fig.2 Normalized signal intensity of GPS L1 signal of PRN25 and PRN31
The normalized signal intensity (SI) shows the fading level is of -50 dB for PRN25 and -60 dB for PRN31, which is consistent with the fading results of the C/N0.The C/N0was plotted in Fig.3 for PRN25 and PRN31, it was calculated using the variance summing method on the tracking loop output data. As can be seen from the plots, C/N0fading level is near -30 dB/Hz for PRN25 and -35 dB/Hz for PRN31. These plots can be used to determine whether or not certain signal tracking parameters need to be adjusted such as PLL bandwidth or integration time.

Fig.3 C/N0of GPS L1 signal of PRN25 and PRN31
Fig.4 and Fig.5 show the curve of S4and σφrespectively, 4th order polynomial fitting method was used to calculate detrending S4and a 6th order high pass Butterworth filter with a cutoff frequency of 0.1 Hz was used to calculate detrending σφ. Where σφexceeds 0.3 cycles and S4>0.5 indicate strong carrier phase fluctuation and deep amplitude fading. It shows that numerous cycle slips in the GPS software receiver measurements. It should be noted that max values of S4occurred near the same time as the max values of σφfor many satellites.

Fig.4 The S4of GPS L1 signal of PRN25 and PRN31

Fig.5 The σφof GPS L1 signal of PRN25 and PRN31
It can also shown in the Fig.4 and Fig.5 that, the background quiet time σφlevels are around 0.1 cycles for Brazil collected L1 signal. This is due to the large phase noise associated with the TXCO clock used in the Brazil data collection system. However, a low phase noise osci- llator should be added to replace the TXCO in the next generation data collection design for general phase scintillation analysis purpose to provide meaningful measurements.
4 Conclusion
In this paper, the impact of real strong ionospheric scintillations over Brazil on GPS L1 software receiver was analyzed. The scintillation data was processed using custom developed signal acquisition and tracking algorithms. The results show numerous strong scintillation with S4>0.5 and σφ>0.3 cycle, during the one hour collecting, the duration of the events lasted over 2600 s.
Analyzing the amplitude fading and carrier phase fluctuation phenomenon can help to build robust GNSS receivers during strong ionospheric scintillation. The results presented in this paper will provide useful guidance in the development of advanced algorithms in signal reacquisition and tracking in future GNSS receivers.
Acknowledgements
The project is supported by National Natural Science Foundation of China (51405203) and Jiangsu Overseas Research and Training Program for University Prominent Young and Middle-aged Teachers and Presidents. The authors would like to thank the support provided by Prof. Jade Morton at Department of Electrical and Computer Engineering, Colorado State University, USA, and Prof. Dennis M Akos at Department of Aerospace Engineering Sciences, University of Colorado, Boulder, USA. Special appreciation is given to Dr. Dongyang Xu for his kind technical guidance.
[1] Rino C L. A power law phase screen model for ionospheric scintillation: 1. Weak scatter[J]. Radio Science, 1979, 14(6): 1135-45.
[2] Rino C L. A power law phase screen model for ionospheric scintillation: 2. Strong scatter[J]. Radio Science, 1979, 14(6): 1147-55.
[3] Carroll M J. Advanced GPS receiver algorithms for assured navigation during ionospheric scintillation[D]. Master dissertation, Miami University, 2014.
[4] Carroll M, Morton Y J, Vinande E. Triple frequency GPS signal tracking during strong ionospheric scintillations over Ascension Island[C]//IEEE/ION Proceedings of Position, Location and Navigation Symposium. 2014: 43-49.
[5] Kassabian N, Morton YJ. Extending integration time for Galileo tracking robustness under ionosphere scintillation [C]//IEEE/ION Proceedings of Position, Location and Navigation Symposium. 2014: 59-72.
[6] Jiao Y, Morton Y T, Taylor S, et al. Characterization of high-latitude ionospheric scintillation of GPS signals[J]. Radio Science, 2013, 48(6): 698-708.
[7] Xu D, Morton Y, Taylor S. Algorithms and results of tracking Beidou signals during strong ionospheric scintillation over Ascension Island[C]//Proceedings of ION ITM. 2014: 730-735.
[8] Wang J, Morton Y T. High-latitude ionospheric irregularity drift velocity estimation using spaced GPS receiver carrier phase time-frequency analysis[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(11): 6099-113.
[9] 陶庭叶, 何伟, 高飞, 等. 综合电离层残差和超宽巷探测和修复北斗周跳[J]. 中国惯性技术学报, 2015, 23(1): 54-58. Tao Ting-ye, He Wei, Gao Fei, et al. Detection and repair of compass cycle slips using ionosphere residual method and ultra-wide lane carrier[J]. Journal of Chinese Inertial Technology, 2015, 23(1): 54-58.
[10] Taylor S, Morton Y, Jiao Y, et al. An improved ionosphere scintillation event detection and automatic trigger for GNSS data collection systems[C]//Proceedings of ION ITM. 2012: 1563-9.
[11] Zhang L, Morton Y. GPS carrier phase spectrum estimation for ionospheric scintillation studies[J]. Navigation, 2013, 60(2): 113-22.
[12] Jiao Y, Morton Y T. Comparison of the effect of highlatitude and equatorial ionospheric scintillation on GPS signals during the maximum of solar cycle 24[J]. Radio Science, 2015, 50(9): 886-903.
强电离层闪烁对GPS软件接收机的影响分析
祝雪芬1,2,陈熙源1,2,陈建锋3
(1. 东南大学 仪器科学与工程学院,南京210096;2. 东南大学 微惯性仪表与先进导航技术教育部重点实验室,南京210096;3. 江苏大学 汽车工程研究院,镇江 212013)
强电离层闪烁会导致信号幅度深度衰减和载波相位激烈震荡,引起GPS载波跟踪环的失锁,从而导致定位误差增长甚至导航中断。本文研究了GPS L1 软件接收机在经历强电离层闪烁时的信号处理算法。研究数据采集于构建于巴西的一个多GNSS多频段中频信号采集系统,数据采集时间为2013年11月,此年为太阳活动极大年。信号捕获、跟踪算法以及由载波跟踪环计算得出的闪烁指数(包活幅度指数S4和载波相位指数σφ等)都在文中进行了详细阐述。分析强电离层闪烁对GPS软件接收机的影响对于研究卫星高级跟踪算法和提高GPS接收机的鲁棒性及定位精度将发挥重要作用。
电离层闪烁;GPS软件接收机;捕获;跟踪
V448.2
:A
1005-6734(2016)04-0480-05
2016-04-23;
:2016-07-27
国家自然科学基金项目资助(51405203)
祝雪芬(1983—),女,博士,副教授,从事卫星导航及组合导航研究。E-mail: zhuxuefen@seu.edu.cn
10.13695/j.cnki.12-1222/o3.2016.04.011
