3D-SPACE序列在脑脊液鼻漏诊断及导航辅助鼻内镜修补术的应用
2016-04-18张艳阳ZHANGYanyang陈晓雷CHENXiaolei孟祥辉MENGXianghui王WANGPeng张治中ZHANGZhizhong余新光YUXinguang周ZHOUTao
张艳阳 ZHANG Yanyang陈晓雷 CHEN Xiaolei孟祥辉 MENG Xianghui王 鹏 WANG Peng张治中 ZHANG Zhizhong余新光 YU Xinguang周 涛 ZHOU Tao
作者单位解放军总医院神经外科 北京 100853
3D-SPACE序列在脑脊液鼻漏诊断及导航辅助鼻内镜修补术的应用
张艳阳ZHANG Yanyang
陈晓雷CHEN Xiaolei
孟祥辉MENG Xianghui
王鹏WANG Peng
张治中ZHANG Zhizhong
余新光YU Xinguang
周涛ZHOU Tao
作者单位
解放军总医院神经外科 北京 100853
【摘要】目的 评价3D-SPACE序列在术前诊断脑脊液鼻漏及3D-SPACE图像导航在经鼻内镜修补脑脊液鼻漏手术中的价值。资料与方法 回顾性分析2010年3月—2014年6月经鼻内镜手术证实的27例脑脊液鼻漏患者的影像学资料,术前行常规3D-T1、T2及3D-SPACE扫描,结合葡萄糖定量分析和高分辨CT诊断脑脊液鼻漏。所有患者均行经鼻内镜脑脊液鼻漏修补术,术中采用3D-SPACE图像导航定位鼻漏漏口。结果 27例鼻漏中,术前3D-SPACE准确诊断脑脊液鼻漏26例(96.3%),T2序列准确诊断脑脊液鼻漏17例(63.0%),两者在术前诊断脑脊液鼻漏方面差异有统计学意义(P<0.05)。结合葡萄糖定量检测和高分辨CT,所有患者均于术前明确诊断。27例患者发现29个漏口,其中8个漏口位于筛板,12个位于蝶窦,6个位于筛窦顶壁,3个位于额窦。26例(96.3%)一次修补成功,1例修补2次后成功;随访(25.4±4.6)个月,未出现明显的手术相关并发症及脑脊液鼻漏复发。结论 3D-SPACE能安全、可靠地诊断脑脊液鼻漏,并清晰显示脑脊液鼻漏的漏口位置。术中3D-SPACE图像导航辅助下经鼻内镜手术能成功修补脑脊液鼻漏,术后并发症少。
【关键词】脑脊液鼻漏;磁共振成像;3D-SPACE;内窥镜检查
Department of Neurosurgery, PLA General Hospital, Beijing100853, China
Address Correspondence to: ZHOU Tao E-mail: sjwkzyy@163.com
修回日期:2015-09-13
中国医学影像学杂志
2016年 第24卷 第2期:96-99
脑脊液鼻漏是脑脊液经颅底的骨质破裂或缺损流入鼻窦或鼻腔,造成脑脊液漏的原因包括医源性、自发性和外伤等[1]。脑脊液鼻漏可以引起致命的并发症,如脑脓肿及脑膜炎,因此正确诊断脑脊液鼻漏并积极治疗尤为重要。随着鼻内镜技术的发展,鼻内镜修补脑脊液鼻漏的安全性及有效性得到很大的提高,是治疗脑脊液鼻漏的最佳手术路径,其中术中准确的鼻漏漏口定位是经鼻内镜手术修补成功的关键[2-3]。3D-SPACE(three-dimensional sampling perfection with application-optimized contrasts by using different flip angle evolutions)是基于快速自旋回波(turbo spin echo,TSE)成像技术,可以获得薄层、高分辨率的三维图像[4]。本研究将此序列用于脑脊液漏的术前诊断,并在经鼻内镜脑脊液鼻漏修补术中,利用3D-SPACE图像导航系统寻找漏口,评价其在经鼻内镜修补脑脊液鼻漏手术中的价值。
1 资料与方法
1.1研究对象2010年3月—2014年6月经鼻内镜手术证实的27例脑脊液鼻漏患者,临床表现为单侧或双侧鼻腔流清亮色液体,低头时加重,收集鼻腔流出的清亮色液体后行葡萄糖定量分析,结果均>1.7 mmol/L。所有患者经观察和保守治疗无效后选择导航下经鼻内镜手术修补。
1.2影像学检查患者入院后均行高分辨CT及MRI检查。MRI检查采用Siemens Espree 1.5T MR仪,头部标准线圈,患者取鼻漏最明显时的体位,其中俯卧位9例,仰卧位15例,侧卧位3例。扫描序列包括3D-T1、T2及3D-SPACE序列,扫描参数见表1。

表1 MRI扫描不同序列的扫描参数
1.3图像分析及制订术前计划由2名经验丰富的神经放射科医师结合常规图像,在Siemens系统工作站上进行三维重建,调整不同的观察方位及角度以显示脑脊液鼻漏的漏口位置,并测量漏口直径。结合文献[5-6]制订脑脊液鼻漏的MRI诊断标准:颅底硬膜或颅骨的连续性消失,缺损处有脑膜脑膨出;颅腔高信号脑脊液与鼻窦或鼻腔内高信号液体影之间有线状高信号影相连,相连处考虑为漏口位置(图1)。
将获得的数据通过局域网传输到导航计划工作站,应用Cranial iPlan 2.6(BrainLab)软件(Vector Vision Sky,BrainLab,feldkirchen,Germany)进行数据转换后,将3D-SPACE序列和三维T1解剖像和T2图像进行融合,制订术前计划。
1.4手术方法患者行全麻,取仰卧位,按照手术要求头部后仰15°~30°,采用Z-Touch红外线注册方法进行严格的导航注册。依据术前确定的漏口位置选择鼻孔及手术探查方式,用0°内镜或30°镜在3D-SPACE图像导航下探查可疑漏口(图2),若见有清亮液体流出并有搏动性则证实漏口位置;若漏口不明显,术中让助手协助压迫颈内静脉或让麻醉医师行Valsava法促进脑脊液外溢。合并脑膨出者,电凝切除膨出坏死脑组织后修补漏口。用刮匙刮除漏口周围苍白水肿的黏膜及肉芽组织,制造新鲜创面。取患者大腿内侧适量肌肉及筋膜,将肌肉捣碎,填于漏口骨缺损内再用筋膜覆盖,用明胶海绵及耳脑胶进一步加强固定,再填塞碘仿纱条。
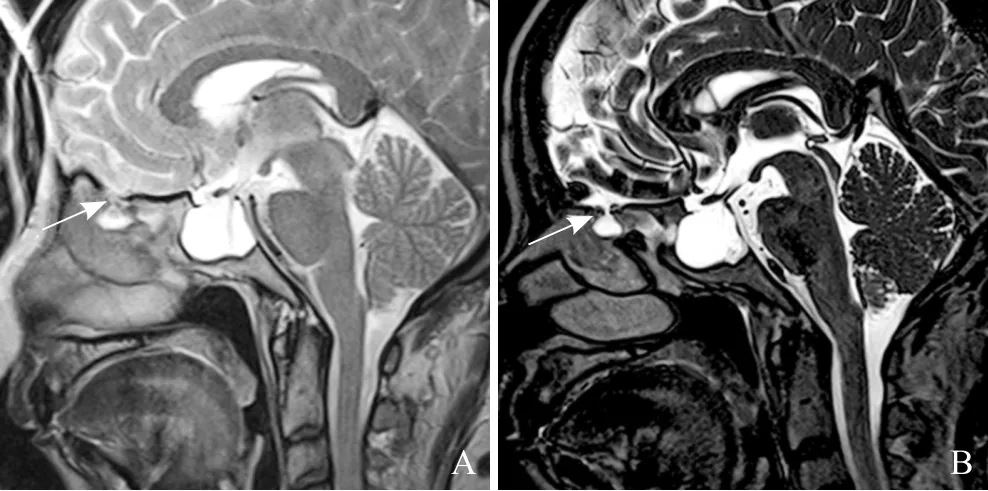
图1 男,52岁,左侧筛板脑脊液鼻漏。术前常规T2(A)与3D-SPACE矢状位(B)显示脑脊液鼻漏漏口情况,箭示漏口位置

图2 女,46岁,筛板脑脊液鼻漏。在经鼻内镜修补脑脊液鼻漏术中,利用3D-SPACE序列图像导航(B、C、D)定位漏口位置。A为术中镜下所见,箭示导航下显示漏口位置
1.5术后处理及随访术后患者保持半卧位,避免用力举重物、用力大便等引起颅内压增高的举动,全身给予抗感染及脱水治疗,1周后拔出鼻腔碘仿纱条,10 d后出院。术后1~3个月在鼻内镜下检查随访1次,若正常则以后每6~8个月随访1次。
1.6统计学方法采用SPSS 12.0软件,计数资料比较采用χ2检验,P<0.05表示差异有统计学意义。
2 结果
2.1影像学检查结果常规T2序列上17例(63.0%)患者中有阳性发现,发现19个可疑漏口,3D-SPACE序列在26例(96.3%)有阳性发现,发现29个可疑漏口。常规T2和3D-SPACE序列在术前诊断脑脊液鼻漏方面差异有统计学意义(P<0.05),见表2。

表2 27例脑脊液鼻漏患者临床资料、影像学检查及手术结果
2.2 手术结果 所有患者均在3D-SPACE图像导航下经鼻内镜进行脑脊液鼻漏修补,27例中共发现29个漏口,其位置见表2及图1、2。27个(93.1%)术中明确的漏口和3D-SPACE序列发现的可疑漏口吻合。1例患者术中发现有2个漏口,而在导航下遗漏了其中位于筛窦顶壁的漏口;另1例患者在导航下通过内镜到达可疑漏口时,未发现骨质异常缺损及清亮色脑脊液流出,术中让麻醉医师行Valsava法促进脑脊液外溢,发现位于后组筛窦顶壁的漏口。
27例患者随访3~60个月,平均(25.4±4.6)个月,随访期间,未出现明显的手术相关并发症及脑脊液鼻漏复发。
3 讨论
脑脊液鼻漏是脑脊液从蛛网膜下腔通过漏口流入鼻腔或鼻窦,这种异常的脑脊液引流途径可以导致脑膜炎或脑脓肿等颅内感染,因此术前准确诊断脑脊液鼻漏十分关键。目前脑脊液鼻漏的诊断方法主要包括鼻腔分泌物含糖量、β2转铁蛋白等生化检查[1]。葡萄糖定量是诊断脑脊液鼻漏的常用方法,但其诊断敏感度和特异度较差。β2转铁蛋白检测对脑脊液鼻漏的诊断特异度高,较少量的脑脊液即能做出诊断,但需要专门的测量仪器。核素扫描、CT、MRI等术前影像学检查能提供脑脊液鼻漏漏口的确切位置及大小[6],其中核素扫描只能判断脑脊液鼻漏是否存在及鼻漏的侧别,不能准确判断漏口的部位;高分辨CT只能通过颅内积气和骨折线等间接影像显示脑脊液漏,同时对合并脑膜脑等软组织膨出显影欠佳;MRI检查包括常规T2及鞘内注射造影剂的脑池造影,常规T2诊断脑脊液鼻漏的特异度和敏感度分别为77%和56%,MRI脑池造影的特异度和敏感度分别为80%和92%[6-7],脑池造影需通过椎管注射造影剂,是一项有创检查。因此,术前诊断脑脊液鼻漏需要结合多种生化检查及影像学检查手段,本组27例患者应用3D-SPACE序列扫描,结合葡萄糖定量检测和高分辨CT,所有患者均在术前获得明确诊断。
3D-SPACE序列是基于TSE成像技术,即一次激发,采集若干回波,可获得TSE的对比度,三维采集和薄层无间隔成像,空间分辨率高;采用可变翻转角(<180°)的非选择性回聚脉冲组成的回波链及非常大的turbo因子,可以降低比吸收率,并且明显缩短了回波间距及回波持续时间,在相同时间内,允许采集更多的数据[8-10]。Mugler等[11]将3D-SPACE序列运用于颅脑成像,发现其具有较高的空间分辨率、无严重伪影且能够任意层面进行重组。SPACE序列是一个重T2的T2WI,利于脑脊液的显示,避免黏膜和脂肪的高信号干扰。本研究将此序列用于诊断脑脊液鼻漏,通过颅腔高信号脑脊液与鼻窦或鼻腔内高信号液体影之间有线状高信号影相连判断漏口的确切位置。术前利用3D-SPACE序列准确诊断脑脊液鼻漏26例(96.3%)患者均有阳性发现,明显优于T2序列(63.0%)。
经鼻内镜脑脊液鼻漏修补术具有损伤小、安全、准确等特点,在国内外已得到广泛应用,其手术成功率为85%~95%[12]。由于内镜视野有限,术中有效并且准确寻找漏口是内镜手术修补脑脊液鼻漏的关键。术中判断漏口位置的方法包括影像导航及椎管内注射荧光素、生理盐水、放射性核素等,其中椎管内注射显影剂及生理盐水为有创检查,且椎管内注射荧光素的安全性需要进一步验证。影像导航系统是将患者术前CT或MRI图像进行三维重建,并通过严格的导航注册后,术者参照显示在计算机监视器上的三维影像可观察到术中手术器械的实际位置,此手术系统已在各种鼻窦及前颅底手术中得到广泛应用[13-14]。本研究在术前扫描3D-SPACE序列,将3D-SPACE序列和三维T1解剖像进行融合,在导航下寻找漏口并修补。在3D-SPACE影像导航下内镜经鼻进行脑脊液鼻漏修补手术具有以下优点:①准确判断解剖结构,避免损伤颈内动脉和视神经等重要结构;②可观察到术中手术器械的实际位置,直接到达可疑漏口,避免过度探查;③3D-SPACE序列为三维采集和薄层无间隔成像,空间分辨率高,可以提高手术的准确性;④相对于其他术中判断漏口位置的方法,3D-SPACE影像导航无创。本研究中,所有患者均在3D-SPACE图像导航下经鼻内镜进行脑脊液鼻漏修补,其中26例1次修补成功,获得满意的效果。
总之,术前应用3D-SPACE结合高分辨CT及葡萄糖定量测定,能有效地诊断脑脊液鼻漏并判断漏口位置。在经鼻内镜脑脊液鼻漏修补术中,采用3D-SPACE图像导航系统能够安全有效地寻找漏口,具有较高的应用价值。但本研究病例数较少,而且均为完成经内镜脑脊液鼻漏修补手术的病例,3D-SPACE序列在可保守治疗的脑脊液鼻漏病例及鼻漏早期病例中的应用价值需进一步探讨,因此需要增加样本量和长期临床随访后再进行分析,同时需要进一步比较3D-SPACE序列与增强MR脑池造影、鼻窦局部应用荧光素、鞘内注射荧光素等其他方法在术前诊断脑脊液鼻漏中的优劣。
参考文献
[1]La Fata V, Mclean N, Wise SK, et al. CSF leaks: correlation of high-resolution CT and multiplanar reformations with intraoperative endoscopic findings. Am J Neuroradiol, 2008, 29(3): 536-541.
[2]Mcmains KC, Gross CW, Kountakis SE. Endoscopic management of cerebrospinal fluid rhinorrhea. Laryngoscope, 2004, 114(10): 1833-1837.
[3]Ozturk K, Karabagli H, Bulut S, et al. Is the use of topical fluorescein helpful for management of CSF leakage? Laryngoscope, 2012, 122(6): 1215-1218.
[4]Algin O, Turkbey B, Ozmen E, et al. Evaluation of spontaneous third ventriculostomy by three-dimensional sampling perfection with application-optimized contrasts using different flip-angle evolutions (3D-SPACE) sequence by 3T MR imaging: preliminary results with variant flip-angle mode. J Neuroradiol, 2013, 40(1): 11-18.
[5]Jayakumar PN, Kovoor JM, Srikanth SG, et al. 3D steady-state MR cisternography in CSF rhinorrhoea. Acta Radiol, 2001, 42(6): 582-584.
[6]El Gammal T, Sobol W, Wadlington VR, et al. Cerebrospinal fluid fistula: detection with MR cisternography. Am J Neuroradiol, 1998, 19(4): 627-631.
[7]Ecin G, Oner AY, Tokgoz N, et al. T2-weighted vs. intrathecal contrast-enhanced MR cisternography in the evaluation of CSF rhinorrhea. Acta Radiol, 2013, 54(6): 698-701.
[8]Kato Y, Higano S, Tamura H, et al. Usefulness of contrastenhanced T1-weighted sampling perfection with applicationoptimized contrasts by using different flip angle evolutions in detection of small brain metastasis at 3T MR imaging: comparison with magnetization-prepared rapid acquisition of gradient echo imaging. Am J Neuroradiol, 2009, 30(5): 923-929.
[9]杜春华, 吴飞云, 祝因苏, 等. 磁共振3D-SPACE序列与3D-CISS序列对Ⅴ~Ⅷ颅神经成像的对照性研究. 临床放射学杂志, 2012, 31(12): 1699-1702.
[10]Haystead CM, Dale BM, Merkle EM. N/2 ghosting artifacts: elimination at 3.0-T MR cholangiography with SPACE pulse sequence. Radiology, 2008, 246(2): 589-595.
[11]Mugler JP, Bao S, Mulkern RV, et al. Optimized singleslab three-dimensional spin-echo MR imaging of the brain. Radiology, 2000, 216(3): 891-899.
[12]Gilat H, Rappaport Z, Yaniv E. Endoscopic transnasal cerebrospinal fluid leak repair: a 10 year experience. Isr Med Assoc J, 2011, 13(10): 597-600.
[13]乔莉, 陈福权, 邱建华, 等. 经鼻内镜脑脊液鼻漏修补术中漏口定位分析. 中华神经外科疾病研究杂志, 2006, 5(6): 539-541.
[14]Tabaee A, Kassenoff TL, Kacker A, et al. The efficacy of computer assisted surgery in the endoscopic management of cerebrospinal fluid rhinorrhea. Otolaryngol Head Neck Surg, 2005, 133(6): 936-943.
(本文编辑张春辉)
Chinese Journal of Medical Imaging 2016 Volume 24(2): 96-99
Three-dimensional Sampling Perfection with Application-optimized Contrasts by Using Different Flip Angle Evolutions Sequence and Its Assisted Navigation in Endonasal Endoscopic Surgery of Repairing Cerebrospinal Fluid Rhinorrhea
【Abstract】Purpose To evaluate three-dimensional sampling perfection with applicationoptimized contrasts by using different flip angle evolutions (3D-SPACE) and its imageguided navigation in diagnosis of cerebrospinal fluid (CSF) rhinorrhea before and during endonasal endoscopic repairing surgery. Materials and Methods A retrospective study was undertaken to analyze image findings and surgical records of 27 consecutive patients with CSF rhinorrhea confirmed by surgery between March 2010 and June 2014. Preoperative MRI examinations including 3D-T1 and conventional T2-weighted sequence were undergone to establish the diagnosis of CSF leak and to detect suspicious CSF leakage sites. The 3D-SPACE results were integrated into three-dimensional (3D) datasets for navigation. All patients were treated with the assistance of 3D-SPACE image-guided navigation to localize CSF leakage sites during endoscopic endonasal surgery. Results Among the 27 cases, 3D-SPACE images correctly established the diagnosis of CSF rhinorrhea in 26 (96.3%) cases, whereas conventional T2 weighted images depicted only 17 cases (63.0%). The difference showed significance between the two methods (P<0.05). All CSF rhinorrhea were identified preoperatively with the combined use of sugar and protein analysis, a highresolution CT scan and MRI scan. Endoscopic surgery identified 29 CSF leakage sites in 27 patients: 8 of 29 were located at the cribriform plate, 12 at the sphenoid sinus, 6 at the ethmoid roof, and 3 at frontal sinus. Successful endoscopic repairs were achieved in 26 patients (96.3%) during the first attempt. One case was repaired successfully after the second attempt. During the follow-up period of (25.4±4.6) months, no major postoperative complications or recurrences were encountered. Conclusion MRI with 3D-SPACE sequence is a non-invasive and reliable method in identifying preoperative CSF rhinorrhea. Intraoperative 3D-SPACE image-guided navigation has been proved to be a feasible and effective technique to locate the sites of the CSF leakage during endonasal endoscopic surgery for repairing CSF rhinorrhea.
【Key words】Cerebrospinal fluid rhinorrhea; Magnetic resonance imaging; 3D-SPACE; Endoscopy
收稿日期:2015-08-07
中图分类号R445.2
通讯作者周 涛
Doi:10.3969/j.issn.1005-5185.2016.02.004