基于故障补偿的汽车半主动悬架容错控制*
2016-04-17高振刚陈无畏汪洪波杨柳青
高振刚,陈无畏,汪洪波,杨柳青,夏 光
(1.合肥工业大学机械与汽车工程学院,合肥 230009; 2.鄂尔多斯应用技术学院,鄂尔多斯 017000; 3.安徽交通职业技术学院,合肥 230051)
2016113
基于故障补偿的汽车半主动悬架容错控制*
高振刚1,2,陈无畏1,汪洪波1,杨柳青3,夏 光1
(1.合肥工业大学机械与汽车工程学院,合肥 230009; 2.鄂尔多斯应用技术学院,鄂尔多斯 017000; 3.安徽交通职业技术学院,合肥 230051)
针对汽车半主动悬架作动器故障对整车乘坐舒适性的影响,提出了一种基于故障补偿的主动容错控制策略。建立了半主动悬架7自由度整车模型和作动器故障悬架模型,设计H∞控制器作为半主动悬架常规控制器。基于故障诊断观测器提出了作动器在线故障估计算法,由完好作动器补偿单一作动器故障的阻尼力损失,通过推导并结合半主动悬架阻尼力的有界性,得出容错控制下各完好作动器的补偿阻尼力。在作动器常见故障模式下进行了仿真和台架试验验证,结果表明:提出的在线故障估计算法可有效估计作动器常见故障的幅值,并在补偿容错控制下,使故障悬架性能经短暂时滞后恢复至与正常悬架性能相接近的水平。
半主动悬架;作动器;故障估计;故障补偿;容错控制
前言
悬架系统是连接车身与车轮之间的传力装置。半主动悬架具有结构简单、能耗少、成本低等优点,且能满足汽车行驶平顺性和操纵稳定性的要求,应用前景十分广阔。文献[1]~文献[3]中分别针对电磁阀式、电流变和磁流变式半主动悬架提出了不同的控制方法,均取得了较好的控制效果。然而,上述控制方法均建立在半主动悬架的传感器、作动器和控制器等的状况完好的基础上。在汽车实际使用过程中,上述元器件不可避免会出现故障,而基于无故障情形下设计的控制器在元器件发生故障时将达不到期望的控制效果,使悬架控制系统性能变差,影响车辆的乘坐舒适性和操纵稳定性。
容错控制是在控制系统元器件出现故障时仍然能保证系统稳定并维持一定性能水平的控制方法,可分为被动容错控制和主动容错控制两种[4]。被动容错控制根据已知故障先验知识,在控制器设计时充分考虑可能出现的故障,实现容错控制。主动容错控制则根据故障检测与诊断系统(FDD)的故障信息在线重新调整控制器参数或结构,使控制系统性能恢复或维持在可接受的范围内。将容错控制应用到悬架控制系统中,可在一定程度上提高被控悬架的可靠性,提升汽车底盘性能。文献[5]和文献[6]中考虑主动悬架传感器故障,建立了FDD系统,在故障估计的基础上重构传感器信号,使故障悬架系统性能有所恢复。文献[7]和文献[8]中考虑悬架系统内部参数摄动及作动器增益故障,离线设计被动容错控制器,使悬架系统对故障和参数摄动不敏感。文献[9]和文献[10]中基于FDD系统获得故障信息,利用控制率重组方法分别对主动悬架作动器信号中断故障和半主动悬架作动器增益故障进行主动容错控制研究。针对作动器故障,上述文献中的被动容错方法虽然提高了悬架的可靠性,但在充分发挥完好悬架性能方面具有一定的保守性;而基于控制率重组的主动容错控制方法因复杂控制算法计算而引起的时滞使其在实际应用中的效果无法保证,同时由于研究的故障模式单一,在故障适用范围上也具有局限性,无法普遍推广应用。而基于作动器故障补偿的主动容错控制无需更改控制器的结构,只需FDD系统估计作动器故障幅值,借鉴故障补偿的基本思想便可处理常见作动器故障模式下的容错控制问题,具有较好的工程实际应用价值。
本文中建立了阻尼连续可调的电磁阀式半主动悬架7自由度整车模型及其作动器故障悬架模型,设计H加权输出反馈控制器作为半主动悬架常规控制器。针对某一作动器发生增益、偏差、卡死和信号中断等常见故障时对汽车性能的影响,提出一种基于故障补偿的主动容错控制方法。该方法以故障诊断观测器在线估计作动器故障幅值为基础,根据半主动悬架整车动力学模型关系式,结合电磁阀式半主动悬架阻尼力的有界性,通过调节剩余3个完好作动器的阻尼力来补偿由故障作动器引起的阻尼力损失,实现主动容错控制。Matlab/Simulink环境下的仿真和台架试验验证了半主动悬架补偿容错控制系统的效果及其算法的有效性。
1 半主动悬架系统建模
考虑车身垂向、俯仰、侧倾运动和前、后悬架非簧载质量的垂向运动,建立如图1所示的半主动悬架整车动力学模型[11]。

图1 半主动悬架7自由度整车模型
车身垂向、俯仰和侧倾的运动方程分别为
(1)
(2)
(3)

非簧载质量垂向运动方程为
(4)

xs1=xs-lfθ+dlφ
xs2=xs-lfθ-drφ
xs3=xs+lfθ+dlφ
xs4=xs+lfθ-drφ
式中:mui为非簧载质量;kti为轮胎刚度;xsi为车身悬架处垂向位移;xui为非簧载质量垂向位移;xgi为路面不平度;ki为悬架刚度;ci为固定阻尼系数;ui为半主动悬架可调阻尼力;csemi为可调阻尼系数。
选取状态向量X、干扰输入W、控制输入U、控制输出Z和量测输出Y,得到半主动悬架7自由度整车状态空间模型为
(5)

W=[xg1xg2xg3xg4]T
U=[u1u2u3u4]T
式中:xsui=xsi-xui为悬架动行程,i=1,2,3,4;A为14×14维矩阵;B1为14×4维矩阵;B2为14×4维矩阵;Cz为11×14维矩阵;Dz为11×4维矩阵;Cy为7×14维矩阵。
由于汽车行驶里程的增加和不正常使用等因素,半主动悬架系统的传感器、控制器和作动器会出现不同形式的故障。其中作动器作为控制力输出的重要部件,对汽车乘坐舒适性、操纵稳定性等有着重要影响,在悬架作动器故障情形下进行容错控制对维持整车动力学性能有着非常重要的意义。根据文献[12]中对控制系统作动器常见故障的描述,结合电磁阀式半主动悬架结构特点,其作动器的常见故障包括以下几类:(1)因液压油泄漏引起的增益故障;(2)因弹簧性能衰减或电磁干扰等原因导致的电磁阀阀芯位移偏差,如不能完全关闭或开启,在数值上表现为偏差故障;(3)因液压油变质或高温烧结等引起的卡死故障;(4)因线路故障引起的电信号中断故障。
通过上述对半主动悬架作动器常见故障及其原因的分析,当第j个作动器发生故障时,其输出可统一表示为
ufj=δjuj+βj
(6)
δj和βj取值不同时代表不同故障模式,具体如表1所示。
半主动悬架作动器发生上述故障时,其输出Uf为
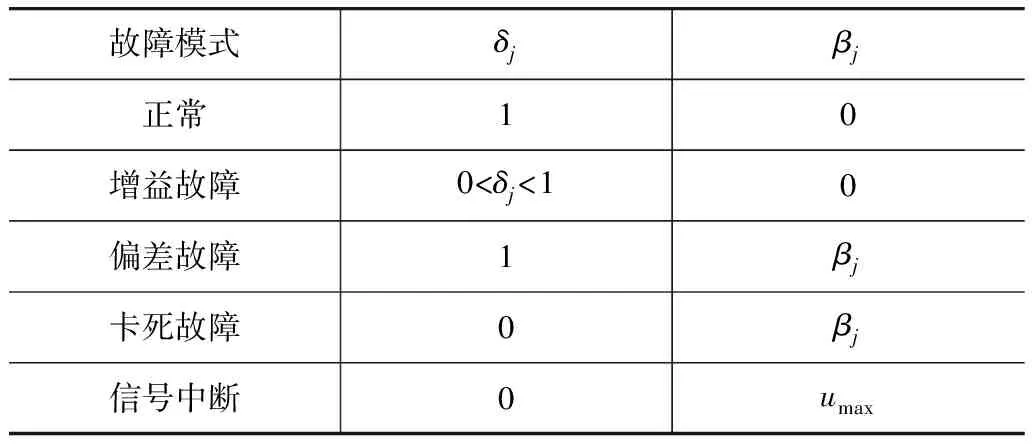
表1 不同故障模式下δj及βj的取值
(7)
式中Fa为作动器故障值向量,表达式为
(8)
式中faj为各故障作动器的故障值。
综上所述,作动器发生故障时的半主动悬架系统状态空间模型为
(9)
2 基于故障补偿的半主动悬架系统容错控制
2.1 容错控制系统结构
以左前作动器故障为例的汽车半主动悬架系统故障补偿容错控制策略如图2所示,主要由H加权输出反馈控制器、故障诊断观测器、故障估计和作动器故障补偿(actuator fault compensation, AFC)几部分组成。

图2 半主动悬架系统故障补偿容错控制策略框图
H加权输出反馈控制器为半主动悬架常规控制器,作动器完好无故障时,半主动悬架在常规控制器控制下获得较好的系统性能;故障诊断观测器通过检测系统残差r来判定作动器是否发生故障。作动器发生故障时,故障估计算法则根据残差信息估计故障幅值a;故障补偿模块为消除因作动器故障引起的整车性能变化,通过调整3个完好作动器的阻尼力输出来补偿故障作动器阻尼力的损失,各完好作动器的补偿阻尼力由悬架动力学模型经推导计算获得,并与常规控制器输出的阻尼力共同作为悬架系统控制输入,实现故障补偿容错控制。
目前,现代科技的加速发展,新型的防水技术不断涌现,其中在地铁施工防水技术中电渗透防渗技术和UEA无缝防水技术是当下使用最广泛的。电渗透防渗系统是采用低电流的电磁场把混凝土中水分子采取排斥。它的工作原理就是使用液体电渗透性能产生电磁场,将混凝土结构中水成分进行电离,让水得到排出。由于电渗透防渗技术在操作上方便,并且成本相当低,最大的优点就是防水持久度高,可以将钢筋混凝土的寿命有所延长,同时水对结构的侵蚀可以大大降低。
2.2 半主动悬架H加权输出反馈控制
设计H加权输出反馈控制器作为无故障半主动悬架系统常规控制器[13],具体框图如图3所示。
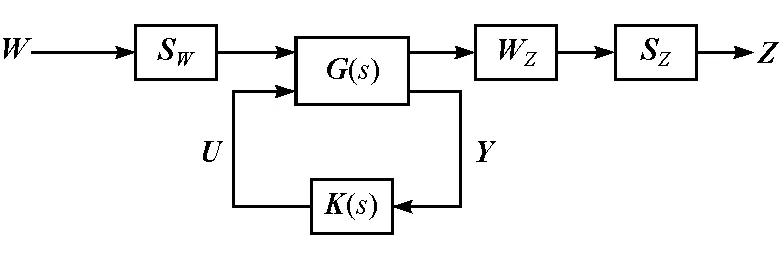
图3 半主动悬架H加权输出反馈控制框图
图中:SW为路面干扰输入的加权系数矩阵;WZ和SZ为控制输出Z的加权传递函数矩阵和加权系数矩阵。加权的目的是设计有效的H控制器,使干扰输入W至控制输出Z的‖Twz‖<1,即能够有效抑制路面不平干扰。
设计的H加权输出反馈控制器U=K(s)Y可写成如下的状态空间表达形式。
(10)
式中:Xk为控制器状态向量;Ak,Bk,Ck和Dk为控制器参数矩阵。
把式(10)应用到式(5)半主动悬架系统中形成闭环系统,根据有界实引理,将闭环系统的稳定性问题转化为LMI是否有可行解的问题[14],利用Matlab中H控制器综合求解器hinflmi确定参数矩阵Ak,Bk,Ck和Dk,从而得到半主动悬架H加权输出反馈控制器。
2.3 半主动悬架作动器故障估计
如上设计的半主动悬架常规控制器可以保证半主动悬架系统在无故障情形下获得较好的控制性能。当悬架作动器发生故障时,仅在常规控制器作用下的系统性能将会出现不同程度的损失。为检测作动器发生故障后系统状态与故障信息,建立如下故障诊断观测器[15]:
(11)


(12)
式中:G为故障估计学习率。
则误差动态方程可表示为
(13)
(14)
由式(13)和式(14)构成的增广误差系统可写为

(15)

式中:I为适维单位阵。
为保证故障诊断观测器可准确估计系统状态信息和故障信息,必须设计适当的观测器增益矩阵L和故障学习率G,使式(15)增广误差系统满足以下条件:(1)系统稳定且满足H性能指标‖‖2≤γ‖ω‖2;(2)系统状态向量渐进趋于0。
(16)
将ω视为扰动输入[16],定义H性能指标γ,故障估计误差系统的目标是
(17)
上式等价于:
(18)
(19)
如果
(20)
成立,则可使增广误差系统稳定并满足H性能指标,对式(20)利用Surch补定理,得
(21)
上式仅满足了设计条件1,为进一步改善状态估计和故障估计的性能,满足条件2,引入以下区域极点配置引理。
引理1[17]一个给定系统的状态矩阵A∈Rn×n的特征根z位于区域Dα(z∈C,Re(z)≤-α)(α>0),当且仅当存在一个对称正定矩阵P∈Rn×n,满足
PA+ATP+2αP<0
(22)
其中区域Dα为保证状态响应具有α衰减度的半平面区域。
(23)
(24)

(25)
2.4 作动器故障补偿
为使半主动悬架系统在作动器发生故障时仍能保持稳定并具有可接受的性能,在作动器故障在线估计的基础上,由完好作动器补偿故障作动器的阻尼力损失。不失一般性,假设在特定时刻仅有一个作动器发生故障,以uj,j=1代表左前作动器发生故障,且故障值为faj(j=1)为例推导各完好作动器的补偿阻尼力。根据式(8)与式(9),结合半主动悬架整车动力学关系得:
(26)
式中:uck(k≠j)为第k个完好作动器的补偿阻尼力,k的取值与含义与j相同。
为保证整车乘坐舒适性,完好作动器的补偿阻尼力需满足:
(27)
(28)

由于det(H)=-2(b+a)≠0,则
(29)

(30)
考虑电磁阀式半主动悬架阻尼力输出的有界性,补偿容错控制下第k(k≠j)个完好作动器输出的阻尼力uftk为
(31)
3 系统仿真与分析
在Matlab/Simulink中建立图2容错控制策略框图中的各模块,编写程序后进行半主动悬架系统故障估计和容错控制仿真与分析。汽车半主动悬架模型参数见表2。
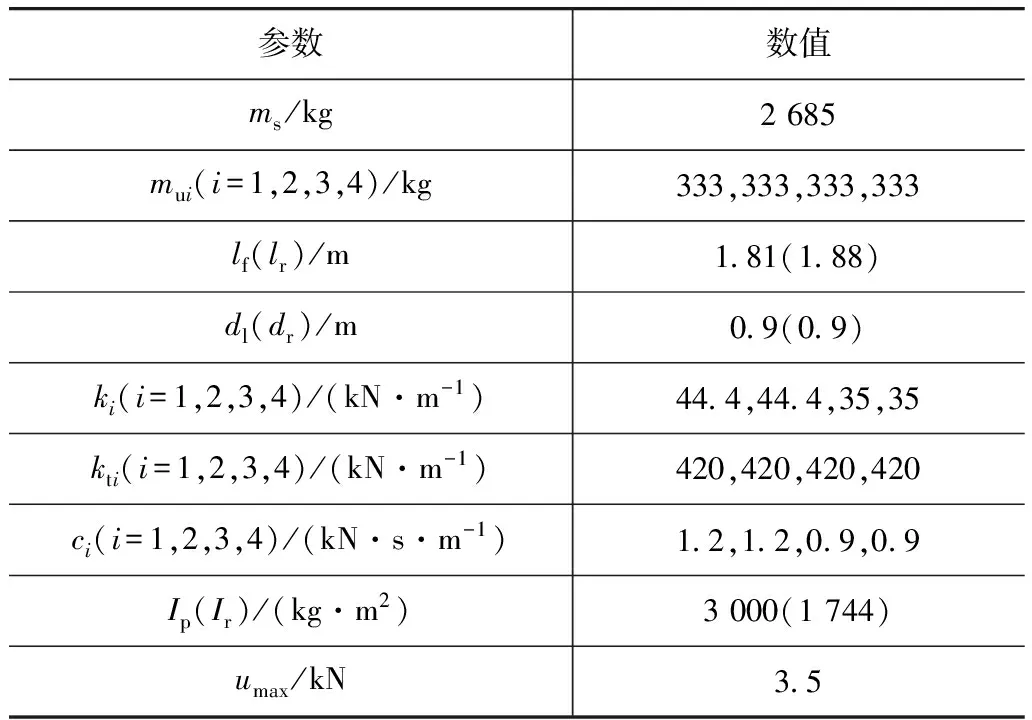
表2 半主动悬架模型参数值
随机路面采用滤波白噪声路面,车辆以15m/s的速度驶过不平度系数为6.4×10-5m3的B级路面,下截止频率为0.1Hz。H控制器加权系数选取如下[6]:
SW=diag(0.00014,0.00014,0.00014,0.00014)
SZ=diag(6,5,5,25,25,25,25,0.022,0.022,0.022,0.022)
WZ=diag(W2,W1,W1,1,1,1,1,1,1,1,1)
式中s为拉普拉斯算子。
3.1 故障估计仿真分析
设定适当的H性能指数γ和稳定裕度α,在Matlab中求解可得观测器增益矩阵L和故障学习率G。
考虑半主动悬架作动器发生增益、偏差、卡死和信号中断等故障下的容错控制,故障值的具体设置见表3。

表3 故障具体情况描述
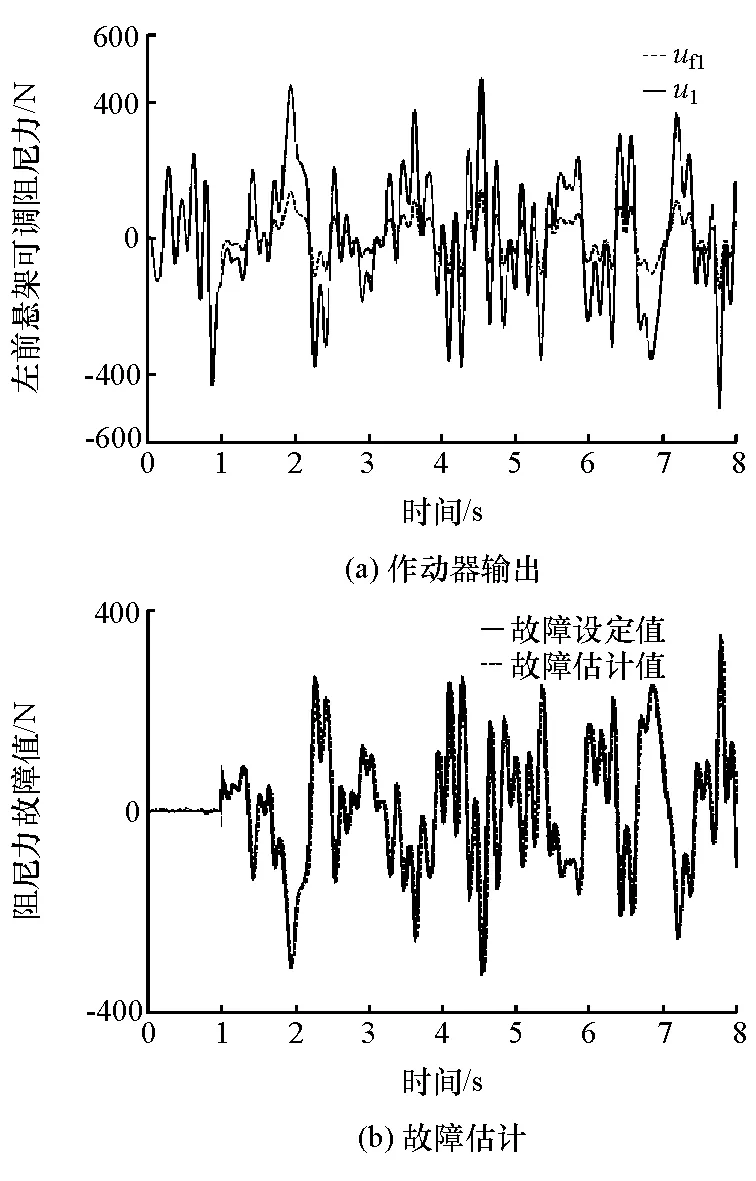
图4 故障1左前作动器输出及故障值估计
故障模式1~3下故障估计的仿真结果见图4~图6,各图中的图(a)为作动器完好时输出的阻尼力ui和作动器故障阻尼力ufi;图(b)为各故障模式下故障估计值,其中,故障设定值是指作动器故障输出与正常输出的差值;故障估计值是指由故障估计算法得到的故障值。如果二者误差较小,则说明设计的故障估计算法是有效的。
左前作动器发生增益故障1时,由图4(a)可见,自故障发生时刻1s开始,可调阻尼力输出值变为正常输出的30%;图4(b)中,在左前作动器未发生故障的1s时间内,故障估计算法估计当前故障值为0;在1s发生增益故障后,故障估计曲线可较好地跟踪故障设定值,仅在数值突变处会有微小偏差,同时,因故障估计算法计算需要时间,故障估计值曲线较故障设定值曲线略有时滞。
作动器发生偏差故障2是由电磁阀阀芯位移偏差所引起。对于常闭型电磁阀,故障电磁阀开度较无故障时偏大,则电磁阀会提前回到开度最大位置,故障作动器输出的阻尼力小于正常阻尼力;反之,电磁阀提前关闭,故障作动器输出阻尼力大于正常阻尼力。图5(a)中,右前作动器发生-200N的偏差故障时,自故障发生时刻起,完好作动器在正负位置上产生大于200N偏差值的阻尼力时,故障作动器输出的可调阻尼力减小了相应的偏差值,而当完好作动器在正负位置上输出的阻尼力小于200N偏差值时,电磁阀提前回到开度最大位置而使可调阻尼力变为0。由图5(b)可见,在故障发生前后,故障估计曲线亦可较好地逼近故障设定值,故障估计误差较小。

图5 故障2右前作动器输出及故障值估计
作动器发生卡死故障3时,电磁阀处于固定开度,故障作动器输出的可调阻尼力大小为卡死处的阻尼力值,阻尼力的正负由流经电磁阀的液流方向决定。由图6(a)可见,左后作动器电磁阀在1s发生卡死故障,卡死处的阻尼力为-245N,当完好作动器输出正阻尼力时,故障作动器输出的阻尼力为245N;而当完好作动器输出负阻尼力时,故障作动器输出的阻尼力为-245N。同样由图6(b)可见,除在阻尼力突变处,故障估计值与故障设定值有一定偏差外,故障估计曲线均可较好地逼近故障设置值曲线。故障4模式下作动器输出曲线和故障估计曲线与故障3相似,考虑文章篇幅,在此不作进一步阐述。
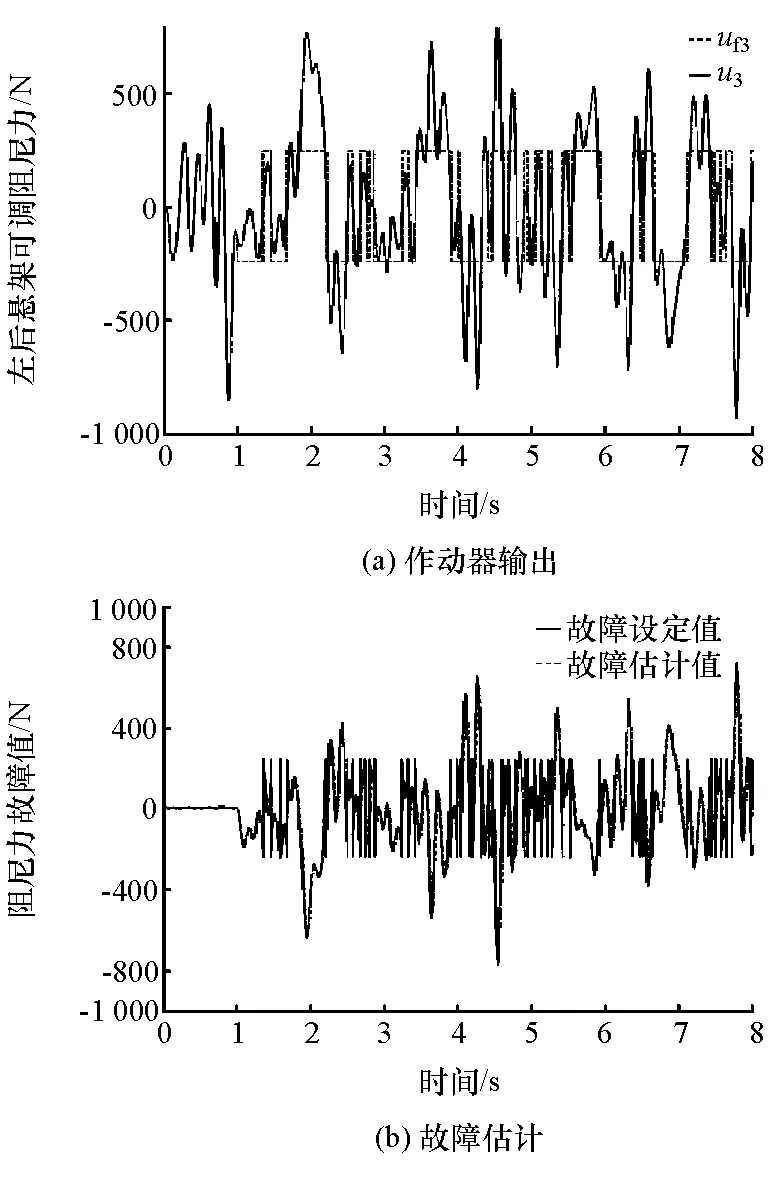
图6 故障3左后作动器输出与故障值估计
通过上述仿真可见:半主动作动器在未发生故障及发生常见增益、偏差和卡死等故障时,设计的故障估计算法均可有效估计作动器故障幅值,为开展故障补偿容错控制奠定了基础。
3.2 容错控制仿真分析
在有效估计可调阻尼力故障幅值的基础上,通过AFC和常规控制器共同作用实现半主动悬架作动器补偿容错控制。
按表3所列故障1~故障4的情形进行仿真。图7~图10分别列出了各故障模式下容错控制前后具有代表性的悬架性能曲线对比图。图中,实线部分代表作动器无故障时由常规控制器即H控制器控制的半主动悬架性能输出;虚线部分代表作动器发生故障时,容错控制过程(以容错时刻5s为容错控制前、后的分界点)的半主动悬架性能输出。

图7 故障1容错控制前后性能对比
由图7可见,在0~1s,半主动悬架作动器未发生故障时,由于故障估计值为0,故障补偿模块不影响H控制器的控制。左前作动器在1s发生增益故障1时,从故障发生时刻1s至容错时刻5s,由H控制器控制的半主动悬架比无故障悬架输出特性差,各项性能指标均出现不同程度的降低。其中:车身垂直加速度、俯仰角加速度和俯仰角峰值较无故障时的峰值分别增加了11.2%,49.8%和139.2%,对整车的乘坐舒适性产生较大影响。在5s时启用AFC模块,由图可见,经0.5~1s的短暂时滞后,悬架各项性能均可在H和AFC构成的补偿容错控制作用下恢复至与无故障悬架系统相接近的性能水平,实现容错控制。同时由图7(b)和图7(c)可以看出,在补偿容错控制下,俯仰角较俯仰角加速度指标性能恢复更好,这是由于角加速度对故障估计误差较为敏感。
由图8可见,右前作动器在1s发生偏差故障2后,半主动悬架性能恶化,其中,俯仰角和侧倾角恶化较为明显。在5s进行补偿容错控制,经0.5~1s的时滞后恢复至与无故障悬架系统相接近的性能水平,验证了容错控制的有效性。
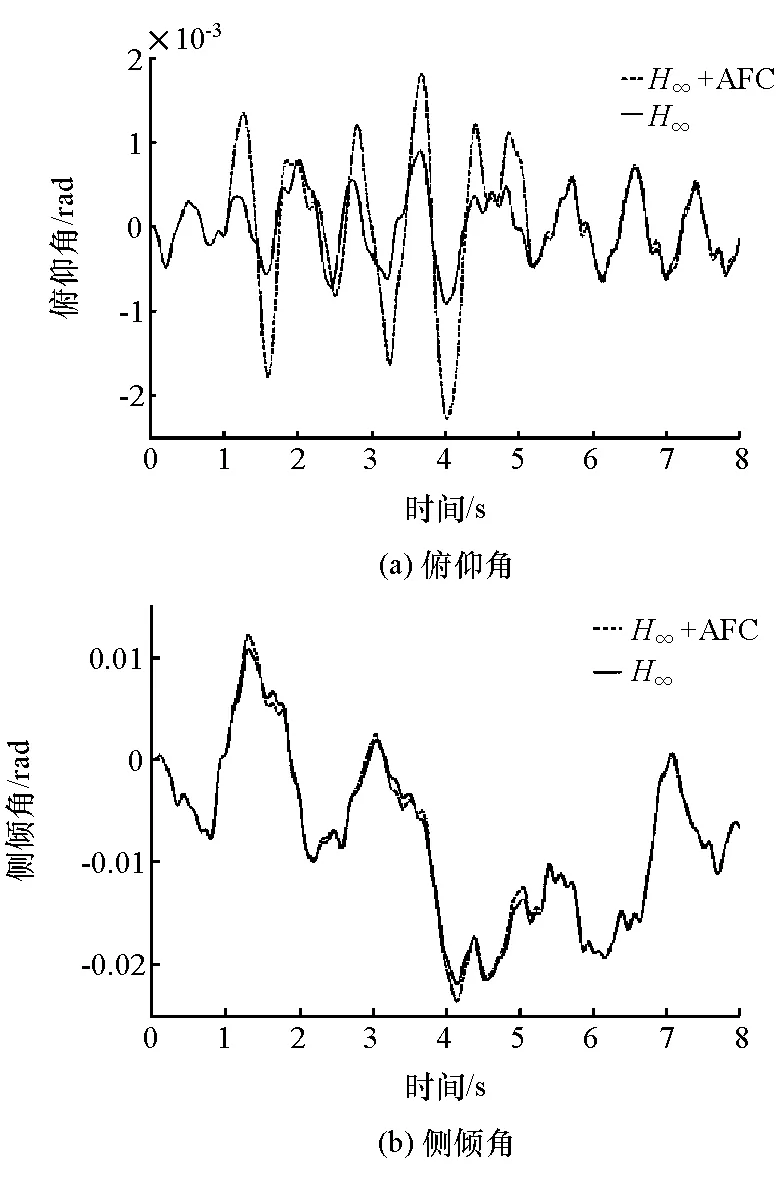
图8 故障2容错控制前后性能对比
同样由图9和图10可见,半主动悬架左后、右后作动器发生卡死和信号中断故障时,悬架性能均自故障发生时刻起逐渐变差,影响整车的乘坐舒适性。从容错时刻5s开始,故障补偿容错控制也均可使故障悬架性能经短暂时滞后恢复至与无故障悬架性能相接近的性能水平。
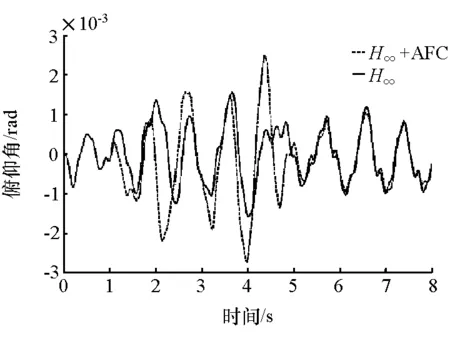
图9 故障3容错控制前后性能对比

图10 故障4容错控制前后性能对比
上述仿真结果表明:半主动悬架作动器未发生故障时,AFC的补偿阻尼力均为0,并不会对半主动悬架常规控制产生影响;当作动器发生增益、偏差、卡死和信号中断等故障时,仅在常规控制器控制下的半主动悬架达不到原有的性能,各项指标出现不同程度的恶化,影响整车的乘坐舒适性;而由AFC和H控制器共同作用的补偿容错控制可使故障悬架性能经短暂时滞后恢复至与无故障悬架系统性能相接近的水平,验证了本文所提出的容错控制方法的有效性。
4 试验验证与结果分析
4.1 试验系统
为进一步验证本文提出的容错控制方法的有效性,在4通道汽车道路模拟振动台上对装有电磁阀式半主动悬架的某型号车辆进行容错控制试验。
首先在单通道电液伺服悬架动态性能试验台上参照相关标准进行减振器性能试验,采用多工况法得到减振器阻尼力ud、活塞杆相对运动速度vd与输入电流I之间的关系曲线ud=f(vd,I),具体试验方案参照文献[1],试验结果如图11所示。利用插值法在Labview中编制查表程序,为开展半主动悬架整车容错控制试验提供查表依据。
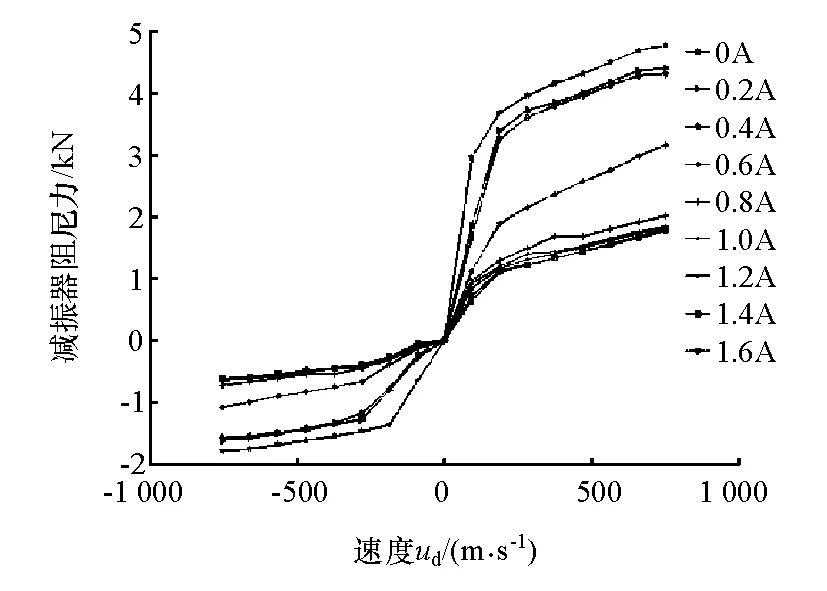
图11 电磁阀式减振器阻尼力-速度特性曲线
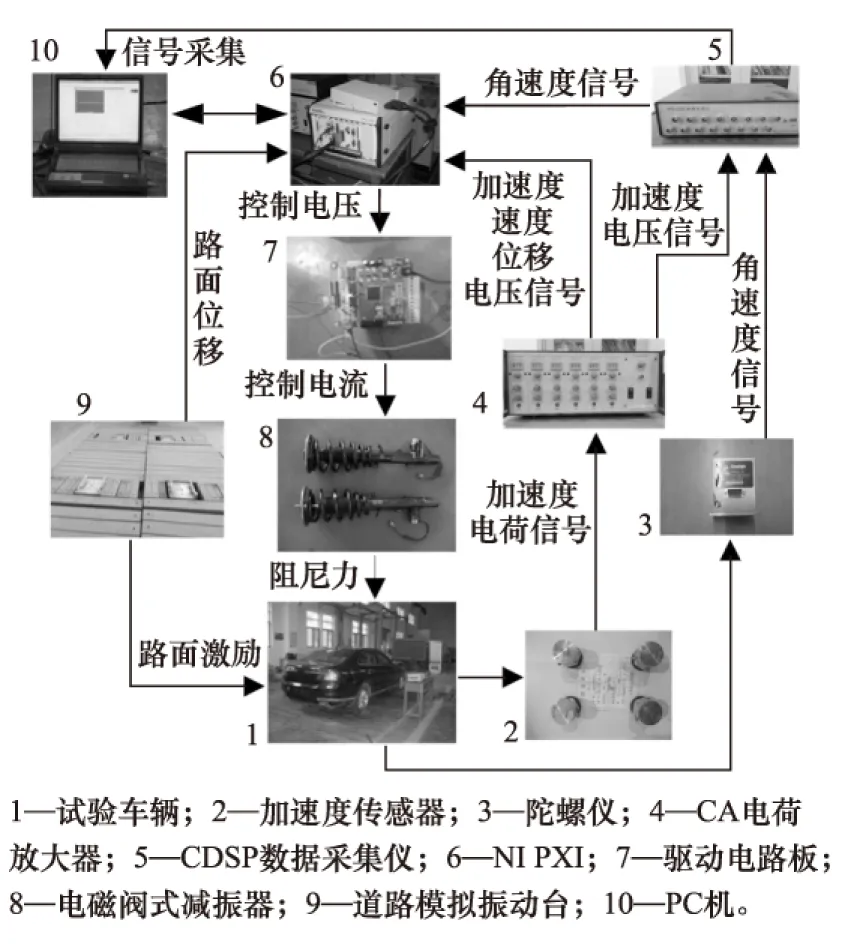
图12 试验系统结构示意图
在减振器台架试验基础上,对半主动悬架系统进行补偿容错控制试验,试验系统方案如图12所示。试验中,采用陀螺仪测量车身俯仰角速度及侧倾角速度,采用加速度传感器获取车身、各簧载质量与非簧载质量处的加速度信号,并通过CA电荷放大器内部电路转化为相应的速度和位移信号,上述信号既获取车辆当前状态信息,也作为控制信号输送给NI PXI主机。NI PXI与装有Labview的PC机通过网线传输数据并形成上下位机的主体结构;在上位机PC中编制信号采集、滤波、查表、H控制器和故障估计与补偿等程序并下载到下位机NI PXI中运行;NI PXI通过自制驱动电路板输出控制电流控制半主动悬架的电磁阀,使其产生适当的阻尼力;CDSP数据采集仪采集车身垂直加速度、俯仰角及侧倾角等信号并传输至PC机以分析车辆状态。试验时,在t=5s将右后作动器输入电流的信号线切断,在t=10s启动故障补偿模块,由CDSP采集至PC机中的数据信息分析容错控制效果。
4.2 容错控制试验结果分析
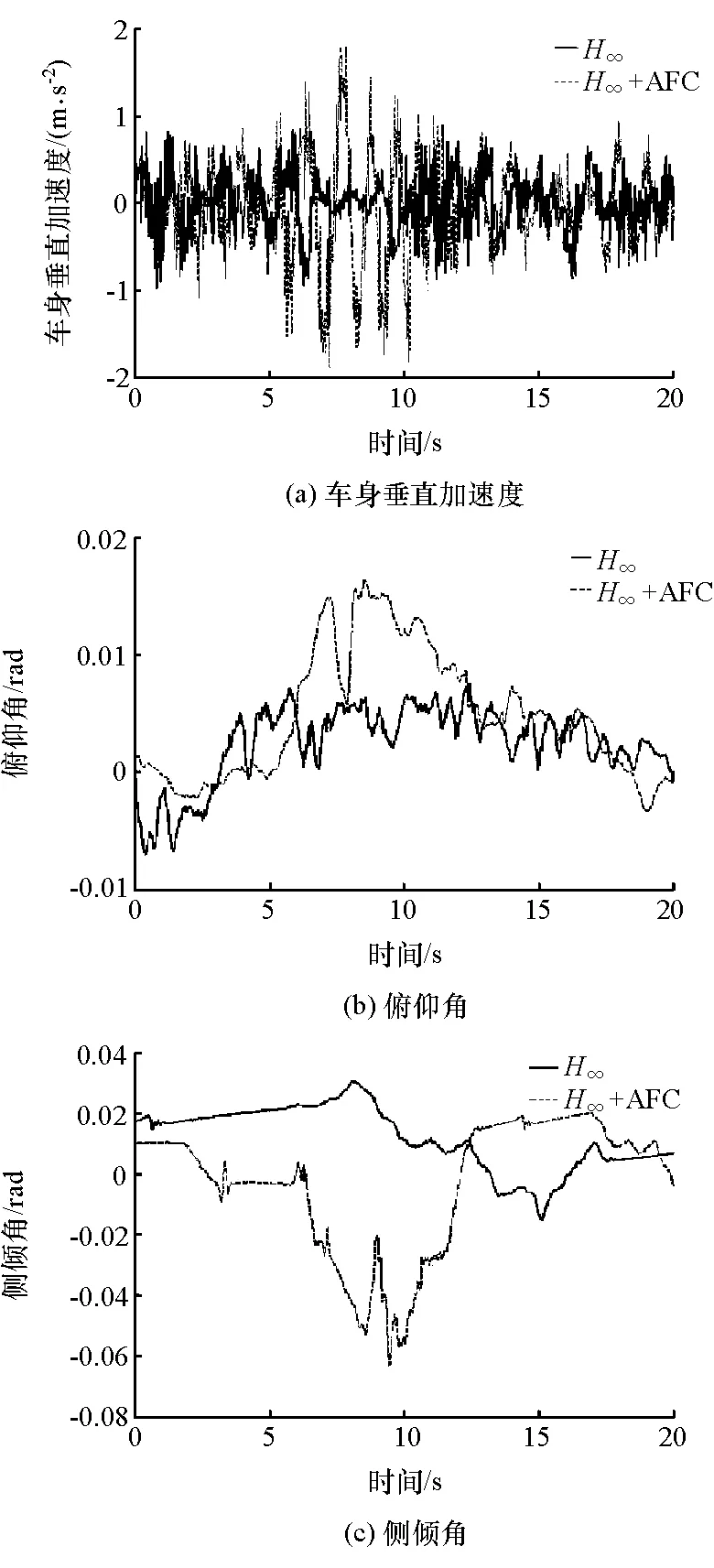
图13 容错控制性能对比试验曲线
在随机路面上由H控制器对无故障半主动悬架进行主动控制试验,再由H和AFC对故障悬架进行分时段的补偿容错控制试验。试验结果如图13所示。由图可见,在5s前未切断右后电磁阀电流信号时,两次试验的车身垂直加速度、侧倾角和俯仰角水平相当,均在一定的数值范围内变动,而从故障发生时刻起,未启用补偿容错控制AFC时,故障悬架性能指标恶化明显,车身加速度、俯仰角和侧倾角的峰值分别增加了89.3%,119.1%和87.7%。在10s启动补偿容错控制AFC后,经约2s左右的时滞,各性能指标均回到与无故障悬架相接近的水平。
在故障4下的仿真计算和台架试验所得各性能指标的均方根值见表4。由表可见:各性能指标的仿真结果和试验结果因试验车辆载荷和参数变化存在一定的差异;但可以看出,半主动悬架发生故障时,在补偿容错控制作用下,各性能指标均有所恢复。同时,对比仿真与试验所得曲线并结合表4的数据可以看出:试验时各性能指标的恢复程度不如仿真时好,恢复所需时间也较仿真时长,一方面是由于电磁阀式减振器的力-速度特性试验的误差所引起,另一方面,实际试验时,除故障估计计算引起的时滞,包括信号传输、电磁阀响应和阻尼液的流动等引起的时滞均对容错控制试验的结果产生影响。

表4 信号中断故障仿真与试验结果对比
5 结论
在建立半主动悬架整车模型和作动器故障模型的基础上,提出一种基于故障估计和补偿的主动容错控制方法,通过本文研究,得出以下结论。
(1) 作动器故障估计是实现故障补偿的基础,本文中基于故障诊断观测器设计的故障估计算法可有效地估计作动器在常见故障下的故障幅值。
(2) 针对作动器故障对整车乘坐舒适性的影响,通过悬架整车动力学模型和故障估计值,结合半主动悬架阻尼力输出的有界性,推导得出补偿容错控制下各完好作动器的补偿阻尼力。在Matlab/Simulink环境下的仿真和在4通道汽车道路模拟振动台的台架试验表明:基于故障补偿的容错控制可降低作动器故障对悬架性能的影响,使故障悬架仍具有与无故障悬架相接近的性能指标。
(3) 基于故障补偿的半主动悬架容错控制方法避开了常规容错控制算法复杂的问题,对各种故障模式具有普遍适用性,为容错控制理论应用至整车悬架系统提供了较好的解决方案。
[1] 夏光,陈无畏,王洪成.新型电磁阀式减振器仿真与试验研究[J].汽车工程,2012,34(11):999-1004.
[2] 孙涛,陈大跃.电流变智能半主动悬架模糊PID控制[J].汽车工程,2004,26(5):605-608.
[3] ANH L D, OLIVIER S, LUC D. An LPV control approach for semi-active suspension control with actuator constraints[C]. 2010 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 30-July 02,2010.
[4] ETERNO J S, LOOZE D P, WEISS J L. Design issues for fault-tolerant restructurable aircraft control[C]. Proceedings of 24th Conference on Decision & Control, Fort Lauderdale,1985:900-905.
[5] ABBAS C, HASSAN N, MUSTAPHA O. Sensor fault detection, identification and fault tolerant control: application to active suspension[C]. Proceedings of the 2006 American Control Conference, Minneapolis, Minnesota, USA,2006,8:2351-2356.
[6] 杨柳青,陈无畏.基于传感器信号重构的汽车主动悬架主动容错控制[J].汽车工程,2013,35(12):1084-1091.
[7] LI H, GAO H, LIU H, et al. Fault-tolerantHcontrol for active suspension vehicle systems with actuator faults[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Systems and Control Engineering,2012,226(3):348-363.
[8] 杨柳青,陈无畏,汪洪波.基于H2/H控制的汽车主动悬架最优鲁棒容错控制[J].中国机械工程,2012,23(24):3013-3019.
[9] YETENDJE A, SERON M, DE D J. Diagnosis and actuator fault tolerant control in vehicle active suspension[C]. Third International Conference on Information and Automation for Sustainability, Melbourne,2007:153-158.
[10] SUN Weichao, PAN Huihui, YU Jinyong. Reliability control for uncertain half-car active suspension systems with possible actuator faults[J]. The Institution of Engineering and Technology,2014,8(9):748-754.
[11] 陈无畏,王其东,肖寒松,等.汽车系统动力学与集成控制[M].北京:科学出版社,2014.
[12] 闻新,张洪钺,周露.控制系统的故障诊断和容错控制[M].北京:机械工业出版社,1998.
[13] 方敏,汪洪波,陈无畏.汽车主动悬架系统H控制器的降阶[J].控制理论与应用,2007,24(4):553-560.
[14] 俞立.鲁棒控制——线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
[15] 张柯,姜斌.基于故障诊断观测器的输出反馈容错控制设计[J].自动化学报,2010,36(2):274-281.
[16] 王占山,张化光.故障估计的故障诊断观测器设计[J].东北大学学报(自然科学版),2005,26(1):221-224.
[17] PEAUCELLE D, ARZELIER D, BACHELIER O. A new robust stability condition for real convex polytrophic uncertainty[J]. Systems & Control Letters,2000,40:21-30.
Fault-tolerant Control of Vehicle Semi-activeSuspension Based on Fault Compensation
Gao Zhengang1,2, Chen Wuwei1, Wang Hongbo1, Yang Liuqing3& Xia Guang1
1.SchoolofMechanicalandAutomotiveEngineering,HefeiUniversityofTechnology,Hefei230009; 2.OrdosInstituteofTechnology,Ordos017000; 3.AnhuiCommunicationsVocationalandTechnicalCollege,Hefei230051
Aiming at the effects of actuator’s faults of semi-active suspension on the ride comfort of vehicle, an active fault-tolerant control strategy is proposed based on fault compensation. A 7 DOF vehicle model with a semi-active suspension with fault actuator are built and a controller is designed as the conventional controller for semi-active suspension. An on-line fault estimation algorithm is put forward based on fault diagnosis observer, the inadequate damping force in fault actuator is compensated by normal actuators, and by derivation with consideration of the boundedness of damping force in semi-active suspension, the compensated damping force for each normal actuator under fault tolerant control are obtained. Both simulation and verification bench tests are conducted under different common fault modes of actuator with a result showing that the online fault estimation algorithm proposed can effectively estimate the amplitude of actuator’s faults, and under active fault-tolerant control the performance of fault suspension can be restored, approaching to the normal one after a short time delay.
semi-active suspension; actuator; fault estimation; fault compensation; fault-tolerant control
*国家自然科学基金(51375131,51305118,51205101)和内蒙古自治区高等学校科学研究项目(NJZY16376)资助。
原稿收到日期为2015年4月7日。