电动机正反转控制程序的优化设计与研究*
2016-04-14余书豪谌永祥
余书豪,谌永祥
(西南科技大学 制造科学与工程学院,四川 绵阳 621010)
电动机正反转控制程序的优化设计与研究*
余书豪,谌永祥
(西南科技大学 制造科学与工程学院,四川 绵阳621010)
摘要:电动机正反转控制在工程应用中具有重要的意义。对电动机各种状态进行了研究,绘制状态切换流程图,利用经验设计法设计步骤,借助保持指令、辅助继电器和定时器,通过三菱编程软件GX Developer-8.34,设计了PLC梯形图,借助仿真软件GX Simulator6-C模拟表明:程序实现了电动机在任意状态下自由切换的功能,并通过实际操作发现,程序方便使用,验证了程序的可行性。经验控制程序运行步数仅36步,与顺序控制程序相比步数少200%,程序自由转换功能使停止按钮使用次数大大降低,从而验证了程序的实用性。研究成果对电动机的工业应用提供了借鉴意义。
关键词:电动机;可编程控制器;正反转控制;自由切换;优化
0引言
可编程控制器(PLC)具有可靠、灵活、可扩展等特点,在自动控制领域应用广泛。而常常作为PLC执行件的电动机,其正反转控制一直很受关注。国内很多学者对此进行了很多研究,并取得了一定进展。文献[1-2]中介绍了PLC控制相比传统继电器控制的优点,但文章仅就简单的正转、反转电路进行了分析。文献[3]在电动机正反转程序的基础上,添加了延时,保证可靠切换,但输入较多。文献[4]介绍了在电动机不停止的条件下实现正反转,但正反转之间没有延时,不够完善。因此,由文献检索的情况可得:满足正转、反转、延时、停止及之间相互切换等要求,且程序的输入、输出个数很少,这样的研究还很少出现。
对于电动机正反转控制编程方法的选用,综合考虑以下编程方法:逻辑设计法、转换设计法、时序设计法、顺序设计法、经验设计法等。不同的编程方法应用于不同的场合。逻辑设计与顺序设计一般用于复杂的控制系统,如电梯的控制系统;转换设计一般用于生产设备的升级改造,如电动机降压启动控制系统;时序设计一般用于有时间先后的控制系统,如交通灯的控制系统,而相比其他方法,经验设计法一般用于简单的控制电路,借助软件编程,便于调试与修改,按照自己固有的设计步骤,设计出实用、简洁的程序。因此,本设计选用经验设计法,并通过顺序设计法编程进行对比,确定出更合理的程序设计。
从现代工业电动机正反转控制的运用经验可知,电动机正反转的控制所涉及的问题包括:正转、 延时、反转、停止及四种状态之间相互切换。笔者考虑减少操作人员的劳动强度,操作简便等因素,采用三输入、两输出,即正转启动按钮、反转启动按钮、停止制动按钮,正转接触器线圈、反转接触器线圈。另外,电动机正反转的控制,是一个经典控制电路,笔者在传统控制的基础上,经过认真研究,采用高效的置位与复位指令、辅助继电器,借助三菱编程软件GX Developer-8.34进行编程,方便修改与调试,根据经验设计法的设计步骤,使设计思路清晰、明确,逐步完成电动机正反转控制梯形图的设计。
1经验设计法与顺序设计法
经验设计法[1]是一种需要设计者掌握可编程控制器的各种指令,依据各种典型控制环节和基本控制电路,根据设计经验,选择合适的指令编制出高效程序的方法。针对电动机正反转,其具体设计步骤如下:①根据设计要求确定输入、输出继电器、辅助继电器;②设计分析;③根据分析过程绘制状态切换流程图;④根据设计经验选择PLC指令并初步设计梯形图;⑤反复模拟并完善梯形图以满足全部控制要求。
顺序设计法[2]是将系统的一个工作周期划分为若干个顺序相连的步,每步对应一种操作状态,根据状态转换条件绘制顺序功能图,再按一定的规则转化为梯形图的设计方法。
2电动机正反转设计
采用三相异步交流电动机。
2.1实际设计要求
(1)开机后,或者停止了很长时间后,按下正转或反转按钮,立即正转或反转;
(2)正转时,按反转按钮,自动停止→延时→反转;反转时与之类似;
(3)正转时,按停止按钮后,立即按正转,不延时立即启动正转;反转与之类似;
(4)正转时,按反转按钮,接着按停止按钮,会停止;反转与之类似;
(5)正转或反转时,按停止按钮,停止。
2.2确定输入、输出继电器、辅助继电器
输入为常开触点X1、X2、X3,分别表示正转启动按钮、反转启动按钮、停止制动按钮。输出为辅助继电器Y1、Y2。同时,考虑到编程的需要,使用PLC内部辅助继电器进行编程。触点X1、X2、X3的辅助继电器分别是M1、M2、M3;考虑到正反转互锁的需要,添加两个辅助继电器,即M4、M5;考虑到正反转之间切换延时的需要,添加两个定时器,即T1、T2。
2.3设计分析
在要求(1)中,当按下正转启动按钮,电动机立即正转,这是一个基本电路:启动保持电路。此电路通过X1的常开触点与正转线圈串联实现,但考虑到常开触点的动作类似“点动”。因此,为了保证转动持续,通过分析可以利用下降沿指令、置位指令等来实现。笔者采用置位指令。同理,对于反转,通过X2的常开触点与反转线圈串联实现,为了保证转动持续,采用置位指令。
在要求(2)中,当按下正转启动按钮,正转启动并运行正常,此时按下反转启动按钮,延时后正转停止、反转启动。电路需要正转、反转继电器及其触点来完成,即M1、M2,延时需要用定时器T,反转取作T2(考虑实际电动机停止惯性时间10s左右,取K=100)。同理,当按下正转启动按钮,正转启动并运行正常,此时按下反转启动按钮,延时后正转停止、反转启动。电路需要正转、反转继电器及其触点来完成,即M1、M2,延时需要用定时器T,正转取作T1(取K=100)。
在要求(3)中,当按下正转启动按钮,正转启动开始,由于操作原因,操作者误按下停止制动按钮,但此时仍需要电动机正转,而能够立即正转而不延时,说明这是正转与停止之间的切换。同理,当按下反转启动按钮,反转启动开始,由于操作原因误按下停止制动按钮,但此时仍需要电动机反转,而能够立即反转而不进行延时,说明这是反转与停止之间的切换。
在要求(4)中,当按下正转启动按钮,正转启动,并正常进行。此时,按下反转启动按钮,反转启动,并正常运行。一段时间后,按下停止制动按钮,会停止运转。同理,当按下反转启动按钮,反转启动,并正常进行。然后,按下正转启动按钮,正转启动,并正常运行。一段时间后,按下停止制动按钮,会停止运转。说明正转、反转、停止三者触点存在互锁关系,从而实现切换。
在要求(5)中,按下正转启动按钮,正转启动,运行正常,按下停止制动按钮,能够停止运转。该电路说明正转的辅助触点串联停止按钮的常闭辅助触点,这是典型的基本电路:正转的起保停电路。同理按下反转启动按钮,反转启动,运行正常,按下停止制动按钮,能够停止运转。该电路说明反转的辅助触点串联停止按钮的常闭辅助触点,这是典型的基本电路:反转的起保停电路。
通过上述分析,电动机存在的状态有:正转、反转、延时、停止。其中正转与反转属于第一状态,而延时与停止属于在正转或反转下的状态,即属于第二状态。根据排列组合知识,有
即12种组合,其中,以正转为例,共有6种组合,即六种基本电路。以下分析初始为正转情况,而反转与之类似。
(1)正转并保持;
(2)延时后正转;
(3)正转与停止之间相互切换;
(4)反转延时后正转;
(5)正转与停止的单次切换;
(6)正转延时后反转,然后停止。
对于电路(1):需要两条语句,第一条采用常开触点X1与置位指令的辅助继电器M1串联;第二条语句是常开辅助触点M1与接触器线圈Y1串联。
对于电路(2):需要三条语句,第一条采用常开触点X1与置位指令的辅助继电器M1串联;第二条是常开辅助触点M1与定时器线圈T1串联;第三条是定时器T1的常开辅助触点与接触器线圈Y1串联。
对于电路(3):需要三条语句,第一条采用常开触点X1与相互并联的置位指令的辅助继电器M1和复位指令的辅助继电器M3串联;第二条是常开辅助触点M1与常闭辅助触点M3串联,并串联接触器线圈Y1;第三条是常开触点X3与相互并联的置位指令的辅助继电器M3和复位指令的辅助继电器M1串联。
对于电路(4):需要三条语句:第一条采用常开触点X1与置位指令的辅助继电器M1串联;第二条是常开辅助触点M1与相互并联的定时器线圈T1和置位指令的辅助继电器M5串联;第三条是相互并联的常闭辅助触点M4和定时器T1常开辅助触点,串联常开辅助触点M1,并串联接触器线圈Y1。
对于电路(5):需要三条语句:第一条采用常开触点X1与置位指令的辅助继电器M1串联;第二条是常开辅助触点M1串联常闭辅助触点M3,并串联接触器线圈Y1;第三条是常开触点X3串联置位指令的辅助继电器M3。
对于电路(6):需要六条语句:第一条采用常开触点X1与置位指令的辅助继电器M1串联;第二条是相互并联的常闭辅助触点M4和定时器T1的常开辅助触点,首先串联常开辅助触点M1,其次串联常闭辅助触点M3,最后串联接触器线圈Y1;第三条是常开辅助触点M1与相互并联的置位指令的辅助继电器M5和定时器T1串联;第四条是:常开触点X2与相互并联的复位指令的辅助继电器M1和置位指令的辅助继电器M2串联;第五条是相互并联的常闭辅助触点M5和定时器T2的常开辅助触点,首先串联常开辅助触点M2,其次串联常闭辅助触点M3,最后串联接触器线圈Y2;第六条是常开辅助触点M2串联定时器线圈T2。
2.4绘制状态切换流程图
便于绘制流程图,仅以启动正转情况为例,反转的分析与之类似。状态切换流程图如图1所示。

图1 状态切换流程图
2.5设计PLC梯形图
2.5.1经验设计法
根据上述设计分析和状态切换流程图,以三菱PLC编程方式为例,考虑初始为正转、初始为反转的梯形图如图2所示。
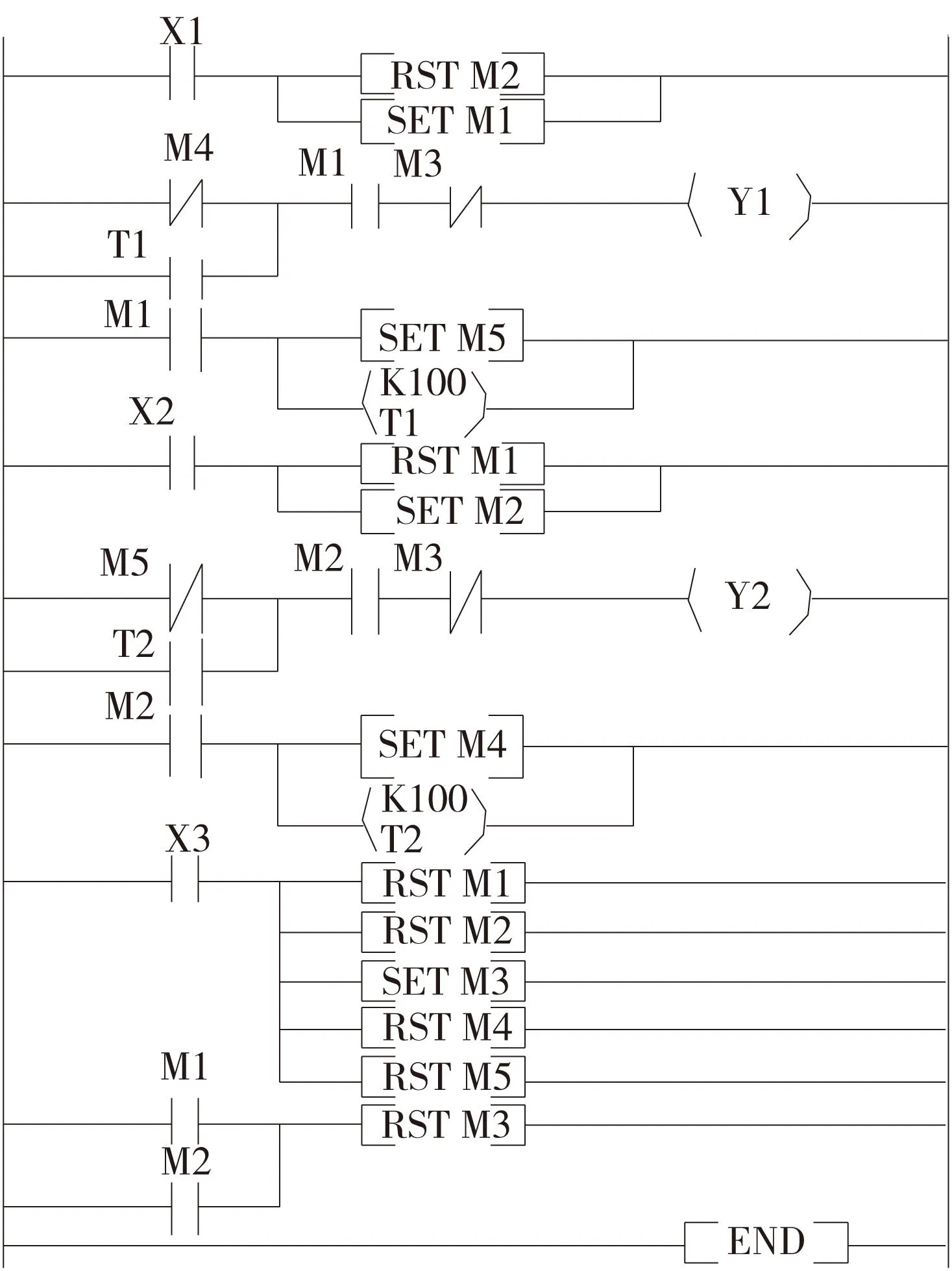
图2 经验设计法控制梯形图
2.5.2顺序设计法
根据上述设计分析和状态切换流程图,以三菱PLC编程方式为例,考虑初始为正转、初始为反转的梯形图如图3所示。
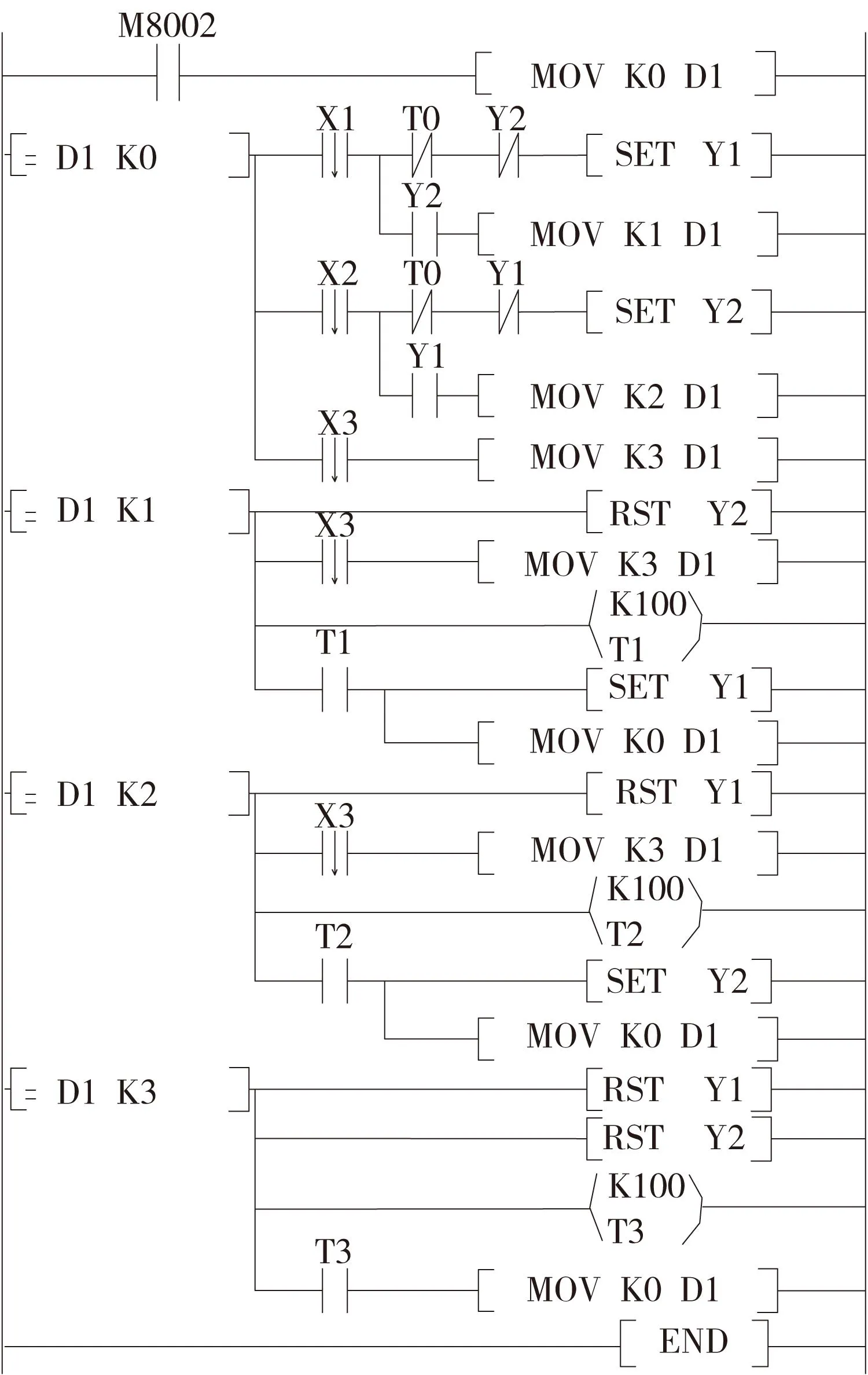
图3 顺序设计法控制梯形图
2.6验证
启动软件GX Developer-8.34,创建新工程,PLC系列采用FXCPU,PLC类型采用FX2N(C),程序类型选择梯形图逻辑,进入程序编写界面,按照图2PLC控制梯形图完成写入,显示程序步数36步。点击梯形图逻辑测试启动按钮,启动仿真开始,程序模拟PLC写入过程,点击软元件测试,通过对软元件进行强制ON、OFF,观察到相应元件的动作,通过时序图监控查看各个软元件的时序图。同样,对图3PLC控制梯形图写入,显示程序114步。
仿真结果显示,采用经验设计法设计的梯形图满足电动机在任意状态下自由切换的要求,程序主函数步数仅36步,而采用顺序设计法设计的梯形图的步数114步,因此,在同一软件下,经验设计法设计的程序,运行时间快,占用存储空间小。通过实际操作发现,该程序方面使用,达到了较好的控制效果。
3结论
阐述了电动机控制的程序设计的过程,借助高效的置位与复位指令、辅助继电器,采用三菱编程软件GX Developer-8.34,方便修改与调试,根据经验设计法详细的设计步骤,使程序的设计思路清晰、明确,从而逐步完成电动机正反转PLC程序。通过三菱仿真软件GX Simulator6-C模拟验证表明:电动机正反转控制程序实现了任意状态之间实现自动切换的要求,运行步数仅36步,经验设计的控制梯形图运行步数比顺序控制的梯形图步数少200%,从而使程序占用的存储空间更小,运行时间更短。在电动机的实际操作中,程序的自由切换功能使停止按钮使用次数大大降低,从而降低操作工人的劳动强度,提高生产率。
[参考文献]
[1] 李英辉. PLC程序设计方法综述[J].无线互联科技,2014(6):105.
[2] 朱玉田,符星球,刘钊. 一种简单通用的PLC顺序控制编程方法[J]. 测控技术,2008(11):70-72.
[3] 赵丽. 三相异步交流电动机正反转的PLC控制[J]. 中国高新技术企业,2014(11):54-55.
[4] 田若秋. 电机正反转的继电-接触控制系统改造成基于PLC的控制系统[J]. 数字技术与应用,2012(2):17.
[5] 王玲,陈冬. 浅谈PLC在电机正反转控制中的实现[J]. 内江科技,2009(5):95.
[6] 蔡静. 电动机的正反转控制(带双重互锁)的PLC程序设计[J]. 科技创新导报,2012(1):95.
[7] 邓星钟. 机电传动控制[M]. 武汉:华中科技大学出版社, 2006.
[8] 孔祥东,王益群. 控制工程基础[M]. 北京:机械工业出版社, 2008.
[9] 杨伯金,张跃明,牟宏明,等.基于PLC刀库控制系统的研究[J].组合机床与自动化加工技术,2015(2):107-109.
[10] 肖军民.一种改进遗传算法在孔群加工路径中的优化[J]. 组合机床与自动化加工技术,2015(2):151-153.
(编辑赵蓉)
Optimal Design and Study of Positive and Negative Rotation Control of Motor
YU Shu-hao, CHEN Yong-xiang
(School of Manufacturing Science and Engineering, Southwest University of Science and Technology, Mianyang Sichuan 621010, China)
Abstract:The positive and negative rotation control of motor is of great significance in the engineering application. The state switching flow chart was drawn by means of the analysis of various states. Based on the design steps of empirical design method, by means of hold instructions and aided relays, the PLC ladder diagram was given based on the program of GX Developer-8.34. Through Mitsubishi software simulation, results show that this program can implement motor switching freely in any state, the program is very convenient and feasible by operation, which indicates the program is available. Compared with sequential control program, this program’s step number less 200%.Switch free could reduce the frequency of operating stop button, which proves the practicability of the program. The result provides reference for the engineering application of motor.
Key words:motor; PLC; positive and negative rotation control; switch freely; optimization
中图分类号:TH164;TG659
文献标识码:A
作者简介:余书豪(1991—),男,河南商丘人,西南科技大学硕士研究生,研究方向为先进制造技术,(E-mail)1538733737@qq.com。
*基金项目:四川省科技厅支撑计划项目(2010GZ0135)
收稿日期:2015-03-25;修回日期:2015-04-22
文章编号:1001-2265(2016)02-0095-03
DOI:10.13462/j.cnki.mmtamt.2016.02.027
