超声电机位移分辨率特性研究*
2016-04-14苏民伟罗敏峰
苏民伟,罗敏峰,郑 伟
(1.福建技师学院 实训中心,福州 350101;2.福建工程学院 福建省数字化装备重点实验室,福州 350108)
超声电机位移分辨率特性研究*
苏民伟1,罗敏峰2,郑伟2
(1.福建技师学院 实训中心,福州350101;2.福建工程学院 福建省数字化装备重点实验室,福州350108)
摘要:超声电机作为一种新型特种电机,有着广泛的应用。由于超声电机应用压电陶瓷作为驱动元件,使得定子产生受迫振动驱动动子运动,从理论上具有高的位置分辨率,为了确定超声电机的位移分辨率,文章从超声电机运行机理出发,分析了影响超声电机位置分辨率的因素为定子/转子摩擦材料系统的瞬态响应。应用单片机作为控制器,通过程序控制超声电机驱动器,测试了旋转型行波超声电机的位置分辨率,得到旋转型超声电机的位置分辨率可以达到0.0078°。得到结论:得到了超声电机分辨率,且发现超声电机定子/转子摩擦材料系统的阻尼是影响超声电机位移分辨率的关键因素之一,超声电机定子和转子摩擦材料系统非线性特性明显。
关键词:超声电机;位置分辨率;瞬态响应;阻尼;非线性
0 引言
超声电机是利用压电陶瓷(PZT)的压电逆效应把电能转换为机械能后,通过摩擦作用把PZT的振动转换为转子的转动,从而输出转动和力矩。超声电机与传统的电磁电机相比较,具有重量轻、低转速、输出大力矩和位移分辨率高等特点,适合航空航天、半导体制造,医疗,生物提取领域的使用,例如在蛋壳强度检测上使用超声电机,超声电机响应快,位置分辨率高的特点被充分利用。因此,超声电机技术的发展非常迅速[1]。从理论上来说,超声电机的位移分辨率为微米级甚至可以达纳米级[2],但是由于超声电机元件质量、加工工艺等因素,超声电机的位移分辨率具体能达到多少,目前尚无具体测试方法和试验研究。目前对压电作动器的位移分辨率研究及其它类型作动器的研究应用已经很普遍[3-7],但主要集中在对超声电机运行机理和精密驱动应用上和特性研究上[8-13],本文对最产业化最成功的旋转型行波超声电机(以下简称超声电机)作为研究对象,从超声电机的工作原理出发,分析超声电机的位移分辨率理论值,并通过试验验证了超声电机的位移分辨率。并总结了影响超声电机位移分辨率的因素,为提高超声电机的分辨率设计提供参考。
1超声电机工作机理对位移分辨率影响
旋转型行波超声电机是目前产业化最广的超声电机之一,作为超声电机重要性能指标和优点的位移分辨率,理论上可以达到微米甚至是纳米级,本节对超声电机的位移分辨率进行理论分析。
行波型旋转超声电机的定子是具有轴对称特点的圆环形板,在无其他模态干扰且忽略阻尼的情况下,这时候转子的转动是由定子位移,通过定/转子间的摩擦材料,将位移传递到转子上,这时的运动为强迫振动。为了简化启动时超声电机的运动,将运动用单自由度来表示,如图1所示。
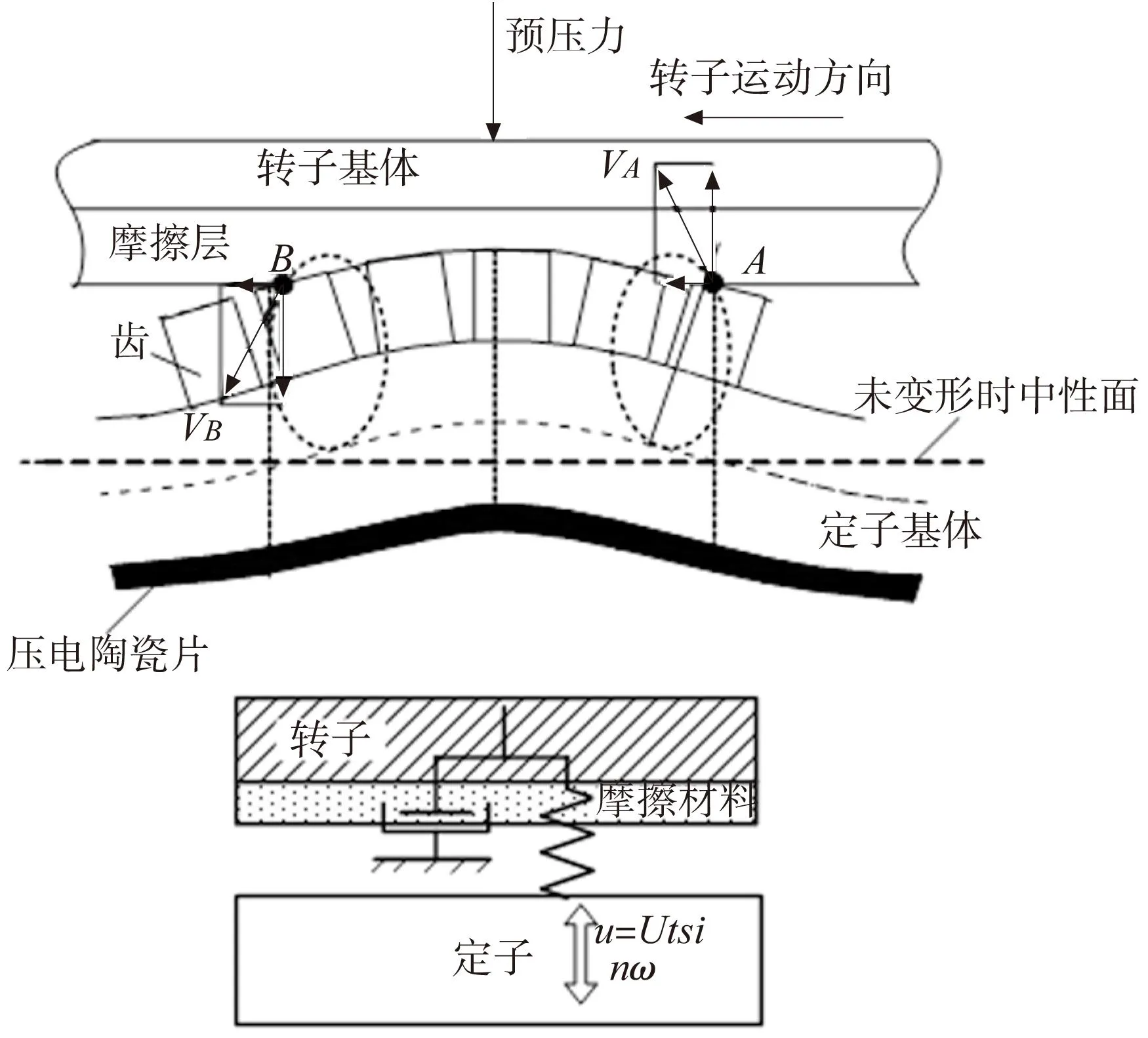
图1 定转子模型
超声电机转子在定子激振力作用下,其运动微分方程(简化为单自由度)可得到结果[2]:
x(t)=Χe-ζω0tsin(ωdt+θ)+
(1)
根据式(1),对超声电机的分辨率分析如下:
随着时间的增加,转子初始瞬态响应xa(t)不断衰减,xb(t)成为强迫响应的主要部分,超声电机的运行达到稳态。定子/摩擦材料转子系统的阻尼越大,过渡过程延续的时间就越短。当系统完全由xb(t)决定时,转子的输出达到稳定状态。
超声电机位移分辨率取决与达到稳态响应的时间,即超声电机转子初始瞬态响应到稳态响应的过渡时间。
从式(1)中可以看出,初始瞬态响应为:
x(t)=Χe-ζω0tsin(ωdt+θ)
其响应时间与式中的相对阻尼系数呈现关系为e-ζω0t,因此超声电机位移分辨率取决与定子-摩擦材料/转子组成的系统相对阻尼系数。
由于超声电机的定子-转子/摩擦材料是一个复合体,其相对阻尼系数直接测试困难,因此本文采用试验的方式来验证超声电机初始瞬态响应过渡到稳定响应,从而确定超声电机位移分辨率。
2超声电机位移分辨率试验
通过上节分析了影响超声电机位移分辨率的因素,本节通过试验对其进行测量。
本试验系统由带测试的超声电机,超声电机驱动器,单片机试验控制装置,反光材料,激光发射装置及激光电源,感光尺组成,组成系统如图2a所示,其工作原理为:超声电机输出轴上有反光材料,激光发射器射出的光线通过安装在超声电机输出轴的反光材料将光线反射到感光尺上,通过控制单片机输出信号控制超声电机驱动器驱动超声电机做微小位移,超声电机转过的角度通过激光在感光尺上激光的位移计算出,试验中的超声电机的转动角度通过图2b中所示的激光构成三角形,通过根据几何关系计算出角度,根据余弦定理
(2)
算出电机转过的角度。
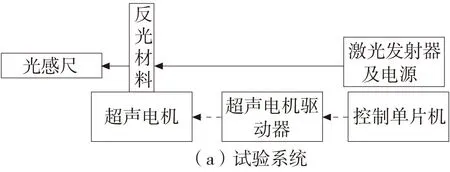

图2 超声电机位移分辨率试验系统
为了实现测试超声电机位移分辨率,需要控制超声电机进行位移,从而测试出其分辨率。本试验使用TRUM60超声电机作为试验对象,用单片机80C51作为控制超声电机输出的控制,试验用开发板STC89C52RC型号的单片机,四位共阳极数码管用于显示超声电机输出脉冲和试验次数,四个独立按键中取一个作为给定输出脉冲的开始键, I/O引脚用于输入输出:P1.0用来接电机的启停接口、P1.1接到电机的正反转接口、P3.2作为中断输入。
本程序要实现超声电机的最小位移,需要对超声电机的P1.0口进行控制,实现P1.0输出超声电机允许运行的时间,该输出是通过定时中断实现的,从而控制超声电机驱动器输出的驱动脉冲数,达到测试超声电机位移分辨率的目的。
3位移分辨率试验及分析
根据超声电机位移分辨率试验方案的设计,搭建试验系统,并通过单片机对超声电机驱动器进行控制,测试超声电机最小位移,其试验系统如图3所示。
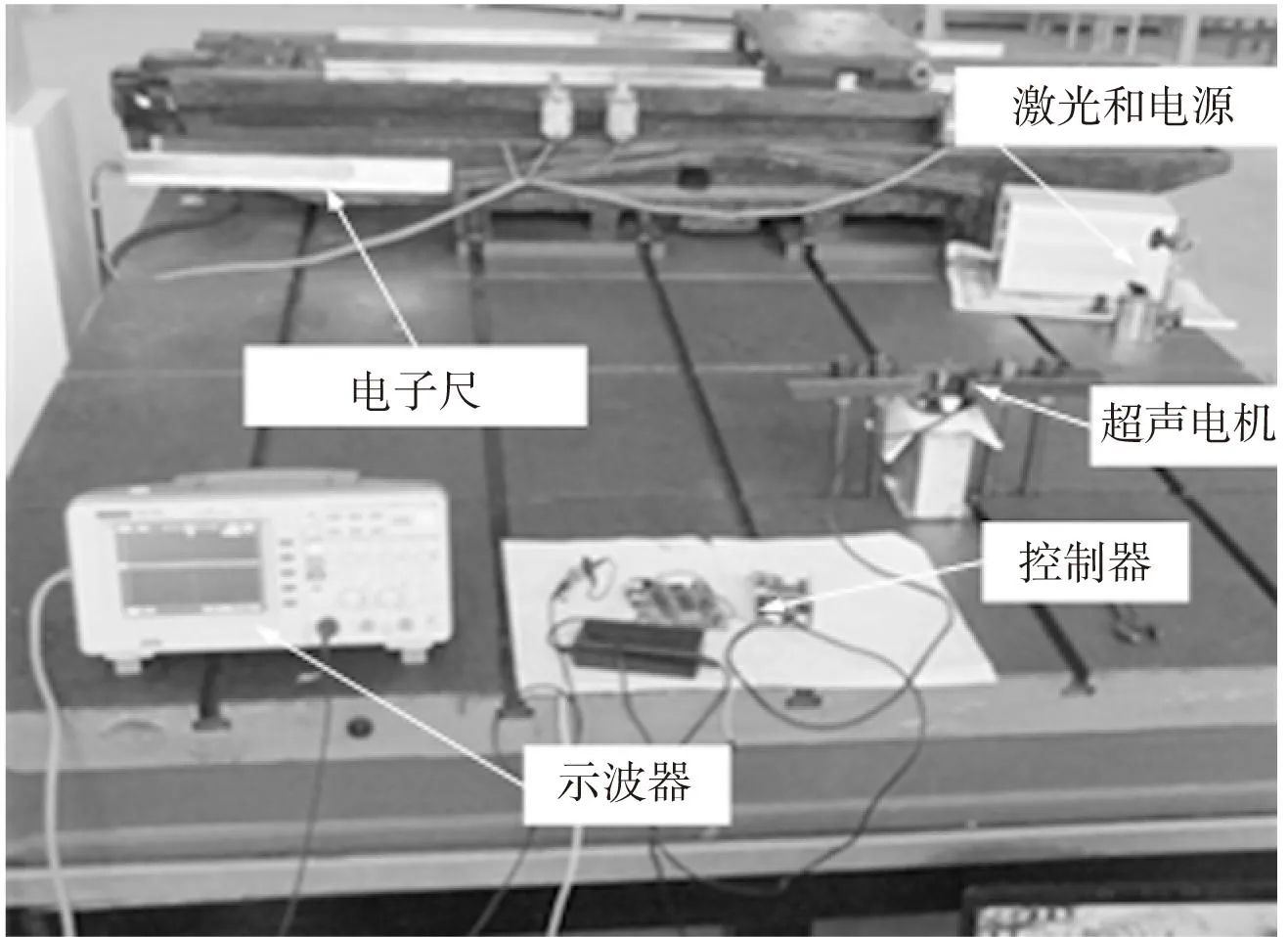
图3 位移分辨率试验图
通过单片机程序,对P1.0口输出,使得超声电机驱动器驱动超声电机分别运行800μs、600μs、400μs、200μs和100μs。
通过单片机控制超声电机分别运行以上时间,并通过式(6)计算出超声电机转动角度的平均值,并计算出超声电机转动角度误差,在超声电机每次运行800μs后停机,然后继续运行800μs反复如此,每次试验采集10个数据点,图4为试验中的一次数据。从数据看出,其平均位移为0.3658°,数据的标准偏差为0.03497,相对标准偏差为9.56%。

图4 超声电机运行800μs时超声电机位移

图5 超声电机运行600μs时超声电机位移
在超声电机每次运行600μs后停机,然后继续运行600μs反复如此,每次试验采集10个数据点,图5为试验中的一次数据。从数据看出,其平均位移为0.3300°,数据的标准偏差为0.02491,相对标准偏差为7.55%。

图6 超声电机运行400μs时超声电机位移
在超声电机每次运行400μs后停机,然后继续运行400μs反复如此,每次试验采集10个数据点,图6为试验中的一次数据。从数据看出,其平均位移为0.2803°,数据的标准偏差为0.01861,相对标准偏差为6.64%。
在超声电机每次运行200μs后停机,然后继续运行200μs反复如此,每次试验采集10个数据点,图5为试验中的一次数据。从数据看出,其平均位移为0.0592°,数据的标准偏差为0.00045,相对标准偏差为0.76%。
在超声电机每次运行100μs后停机,然后继续运行100μs反复如此,每次试验采集10个数据点,图5为试验中的一次数据。从数据看出,其平均位移为0.0078°,数据的标准偏差为0.00072,相对标准偏差为9.22%。
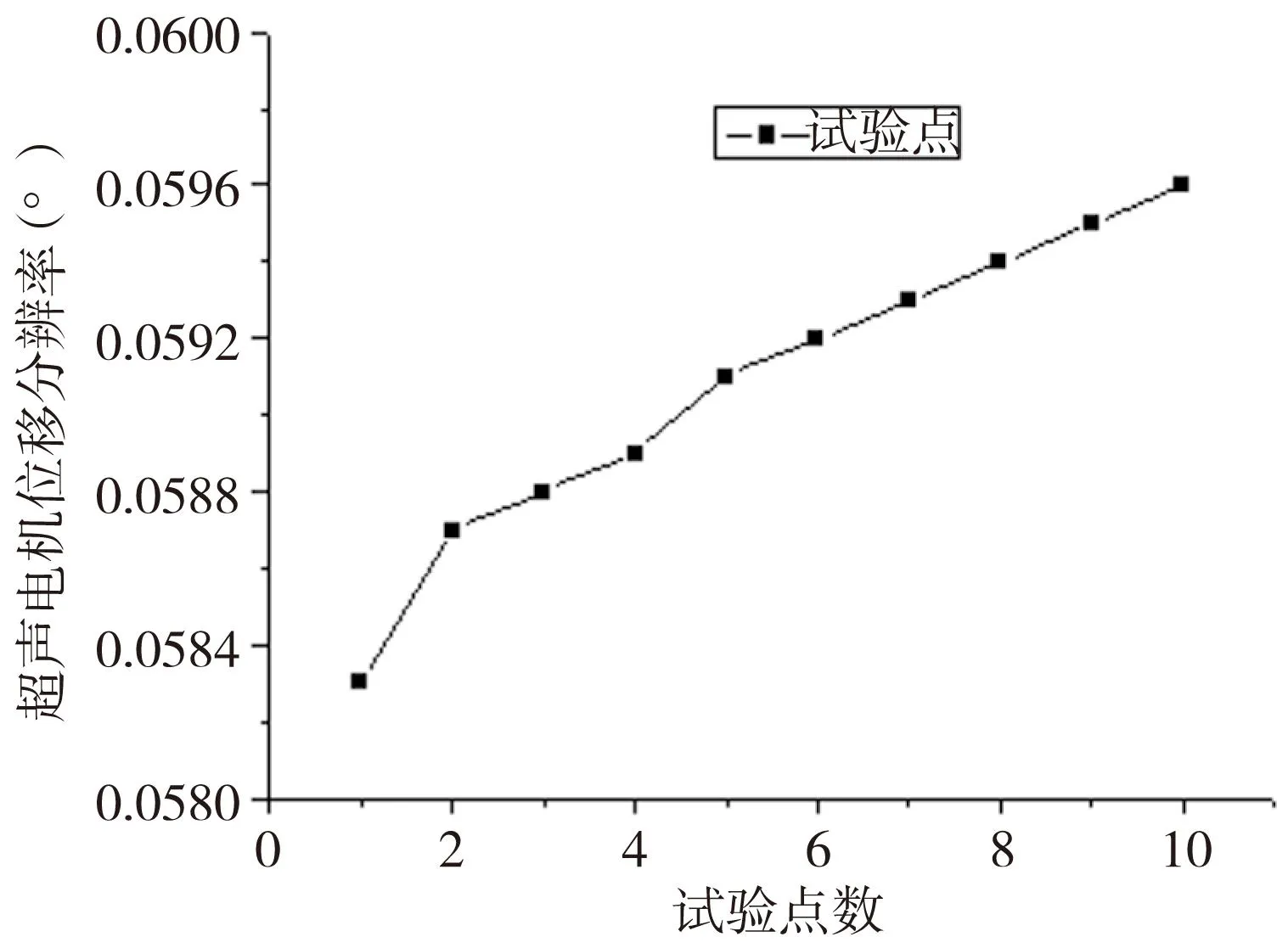
图7 超声电机运行200μs时超声电机位移

图8 超声电机运行100μs时超声电机位移
总结上面的试验数据,如表1所示。

表1 超声电机位移分辨率试验数据表
当超声电机运行时间降低到70μs时,超声电机的运行已经表现出及不稳定状况,无法正常运行。从试验数据看,超声电机的驱动频率和幅值不变的前提下,电机位移分辨率可以到0.0078°,其相对标准偏差最大约10%。
从本文1节分析可知,超声电机位移分辨率取决与初始瞬态响应的衰减程度,超声电机正常运行时由强迫响应决定的。由于文中分析是经过简化的模型,而实际中的阻尼则复杂的多。从试验结果发现,超声电机在试验中,电机运行800μs和100μs情况下,其分辨率的误差比较一致,而运行间隔200μs时,则相对标准偏差为0.76%,这个现象比较有趣。对于超声电机的其它运行时间,可以用欠阻尼情况来解释,超声电机振动模型特征根是:
(3)
其阻尼系统的瞬态响应是非周期振动,但其具有等时性,但是由于其实际系统中的阻尼是非线性的,因此出现了较大的偏差。而超声电机运行时间为200μs时,其相对标准偏差相比其它试验值非常小,即与理论上的假设吻合。该系统的非线性性还需要进一步的研究。
4结论
本文从理论上分析了影响位移分辨率的因素,并通过单片机构成的控制器对其脉冲时间的控制,从而对超声电机分辨率进行了试验,从试验结果可以得到结论:
目前TRUM60超声电机的位移分辨率可以达到0.0078°;
超声电机定子/转子摩擦材料系统的阻尼是影响超声电机位移分辨率的关键因素之一;
在TRUM60超声电机位移分辨角度为0.059°时,其系统特性与理论分析的假设条件较吻合。而在其他分辨角度时,超声电机定子和转子摩擦材料系统非线性特性明显,需要进一步对其非线性特性进行研究。
[参考文献]
[1] 赵淳生.世界超声电机技术的新进展[J].振动、测试与诊断,2004,24(1):1-5.
[2] 赵淳生. 超声电机技术与应用[M]. 北京:科学出版社,2007.
[3] 黄特生, 高健, 周志强,等. 面向电子制造的高速精密宏微运动平台研究[J]. 组合机床与自动化加工技术, 2015(2):50-54.
[4] Yangqiu Xie, Yonghong Tan, Ruili Dong. Nonlinear Modeling and Decoupling Control of XY Micropositioning Stages With Piezoelectric Actuators[J]. Mechatronics, IEEE/ASME Transactions, 2013 ,18(3): 821-832 .
[5] Zhang Qi, Pan Cheng Liang, Ma Yu Ting, et al. Piezoelectric Rotary Motor Based on Active Bulk Torsional Element With Grooved Helical Electrodes[J]. Mechatronics, IEEE/ASME Transactions,2012,17(2):260-268 .
[6] Khan M U,Bencheikh N,Prelle C,et al.A Long Stroke Electromagnetic XY Positioning Stage for Micro Applications[J]. Mechatronics, IEEE/ASME Transactions, 2012,17(5): 866-875.
[7] 刘炯钟, 林敏, 郭斌. 嵌入式伺服压机系统高精度位置控制的研究[J]. 组合机床与自动化加工技术, 2015(4):91-93.
[8] B. Radi, A. El Hami. The study of the dynamic contact in ultrasonic motor[J]. Applied Mathematical Modelling, 2010,34(12):3767-3777.
[9]姚志远,张建辉,赵淳生. 超声电机定、转子接触微观力学模型[J]. 哈尔滨工程大学学报,2010,31(9):1191-1195.
[10]陈超,赵淳生.旋转型行波超声电机中三维接触机理的研究[J].中国电机工程学报,2006,26(21):149-155.
[11] 徐从裕, 孙雅琼, 方文琼, 等. 超声电机微纳驱动参数调节机构设计[J]. 中国机械工程 2013, 24 (7):886-889.
[12]张建桃, 张铁民, 梁莉. 超声电机非线性建模和广义预测控制[J]. 电机与控制学报, 2011,15(6): 50-56.
[13]潘松, 李华峰, 黄卫清. 微型超声电机驱动及其优化研究[J]. 电机与控制学报, 2011, 15(3): 65-68.
[14]史建强,姜歌东,赵飞,等.一种数控机床空间圆运动轨迹测试方法[J].组合机床与自动化加工技术,2014(7):57-61.
(编辑赵蓉)
Research on Resolution of Positioning of Traveling Wave Type Rotary Ultrasonic Motors
SU Min-wei1,LUO Min-feng2,ZHENG Wei2
(1.Training Center,Fujian Technician College,Fuzhou 350101,China;2.Digital Equipment Key Laboratory of Fujian,Fujian University of Technology,Fuzhou 350108,China)
Abstract:Traveling wave type rotary ultrasonic motors (TRUM) as a new type motor, has a wide range of applications. Ultrasonic motor, that utilizes the vibration of t the stator and the reverse piezoelectric effect of piezoelectric materials, has a high position resolution theoretically. Based on operating mechanism of ultrasonic motor, influence of transient response of ultrasonic motor is analyzed. Using single chip computer as controller, we test the TRUM’s position resolution. TRUM60’s position resolution is 0.0078°. The damping of TRUM’s stator/rotor system is one of the most influence factors for position resolution. Operating of ultrasonic motor has the nonlinear characteristics.
Key words:traveling wave rotary ultrasonic motor; position resolution; transient response; damping; nonlinear
中图分类号:TH162;TG506
文献标识码:A
作者简介:苏民伟(1970—),男,福建龙岩人,福建技师学院高级讲师,硕士,研究方向为自动控制技术及应用,(E-mail)suminwei@163.com。
*基金项目:国家自然科学基金(51275228);福建省自然科学基金项目(2010J01268);福建工程学院科研基金(GY-Z09059)
收稿日期:2015-10-12
文章编号:1001-2265(2016)02-0009-04
DOI:10.13462/j.cnki.mmtamt.2016.02.003
