基于COSMOSMotion轴承套圈方向转换机构设计及仿真
2016-04-13潘振邱望标逯博文李宜汀李哲
潘振,邱望标,逯博文,李宜汀,李哲
(贵州大学,贵州贵阳550000)
基于COSMOSMotion轴承套圈方向转换机构设计及仿真
潘振,邱望标,逯博文,李宜汀,李哲
(贵州大学,贵州贵阳550000)
摘要:主要是设计隧道式交变磁场去应力装置中的轴承套圈的转向机构,利用SolidWorks三维设计软件通过拉伸、切除、阵列、扫描等特征方法[1]对该机构进行三维建模,然后运用运动仿真插件COSMOSMotion对三维模型进行运动仿真,得到轴承套圈的速度和加速度曲线,对比仿真结果修改设计方案。通过三维建模和运动仿真提高了机构设计的形象性和直观性[2]。
关键词:SolidWorksCOSMOSMotion仿真三维建模
[3]Zhengdao Tang, Pengcheng Long, Shanqing Huang, Zou Jun.Real-time dose assessment and visualization of radiation field for EAST tokamak[J].Fusion Engineering and Design,2010,85(7):1591-1594.
[4]任国栋,陈林华,陶学锋,等. 基于Unity3D的虚拟博物馆信息可视化系统[J]. 计算机系统应用,2013,22(9):86-90.
[5]马龚丽,杨敏,等. 基于Unity3D的三维海底地形建模[J]. 安徽电子信息职业技术学院学报,2013,12(6):24-27.
[6]韩桂明,周凌,赵志鹏. 基于Unity3D的房间仿真技术[J]. 电子测试,2014,12(11):49-51.
[7]马瑞. 基于Unity3D的多平台三维虚拟数字校园的设计与实现[J]. 蚌埠学院学报,2014,3(2):13-16.
[8]郑阿奇. Visual C++实用教程[M]. 北京:电子工业出版社,2007:13-16.
[9]张孟娟. 电力运营监控可视化管理研究[D]. 西南财经大学,2013.
[10]李莉. 攀枝花电业局三维可视化变电设备信息管理系统的设计与实现[D]. 电子科技大学,2012.
[11]崔瀛潇. 基于Unity3D引擎的三维可视化技术在煤炭地震勘探中的应用[J]. 中国煤炭地质,2014,26(4):58-63.
0引言
随着计算机技术的进步与发展,三维设计软件在机械设计中的应用越来越广泛[3]。SolidWorks是基于Windows开发的三维CAD系统,有强大的三维建模能力,是运动仿真、应力分析的工具,使用方便操作简单[4]。COSMOSMotion是一个与SolidWorks无缝集成运动仿真系统,通过添加运动、约束、力、碰撞等,机械进行运动和动力仿真模拟,用动画、图形、数据等多种形式输出零部件的轨迹、速度、加速度、作用力、反作用力等运动和动力参数[5]。本文针对转向机构的设计方案利用SolidWorks进行三维建模,运用COSMOSMotion对三维模型进行运动仿真分析,然后对比仿真结果修改设计方案。
1轴承套圈方向转换装置三维建模
已知隧道式交变磁场去应力装置运转时,轴承套圈首先水平穿过线圈,磁场线从轴承套圈径向穿过,经过径向磁场处理几分钟后,轴承套圈再竖立着穿过线圈,此时磁场线从轴承套圈的轴向穿过,等待轴向磁场的去应力处理。这就要求有一个转向装置能把轴承套圈从水平的状态转换成竖立的状态。轴承套圈参数:外径36 mm、内径30 mm、宽度8 mm,材料为45钢冷拔。
根据已知条件设计合理的方案,利用SolidWorks拉伸、切除、阵列、扫描等特征方法三维建模如图1所示,转向装置由3个零件装配而成,轴承套圈由转向机构顶部水平进入,在里面的运动轨迹是一条空间曲线,从左边底部窄缝里出来以后是竖立的位置状态。
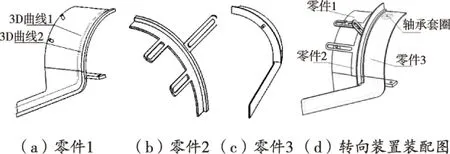
图1 转向装置三维零件图及装配图
2轴承套圈方向转换机构干涉检查
三维建模完成以后,还要进行干涉检查,来验证设计是否合理,能否按照预定的方式正确装配起来而不发生装配不进去的情况[6]。利用SolidWorks进行干涉检查,过程如下:
1)新建装配图。启动SolidWorks后,新建装配图。点击“插入零部件”的选项,选中将要装配的零部件。在开始装配之前先在零件1上作两条3D曲线(图1中(a)),3D曲线2在零件1的曲面上,并且距离零件1右边内边界的距离是18 mm,3D曲线1在3D曲线2的正上方,距离它4 mm。在轴承套圈上作2个空间点(图2),中心点1在轴承套圈的正中心,点2是轴承套圈底面圆的中心点。作2条3D曲线和2个空间点的目的是为了在后续的轴承套圈与转向装置的路径配合中建立好运动路径和零部件顶点[7],以对轴承套圈的运动路径和位置状态进行约束;
2)点击“配合”选项,然后按照设计要求对零部件用重合、相切、同心圆等约束条件进行配合;
3)配合完毕以后,在“工具”菜单中选择干涉检查,发生干涉的位置将会以红色显示,干涉检查结果如图3所示。
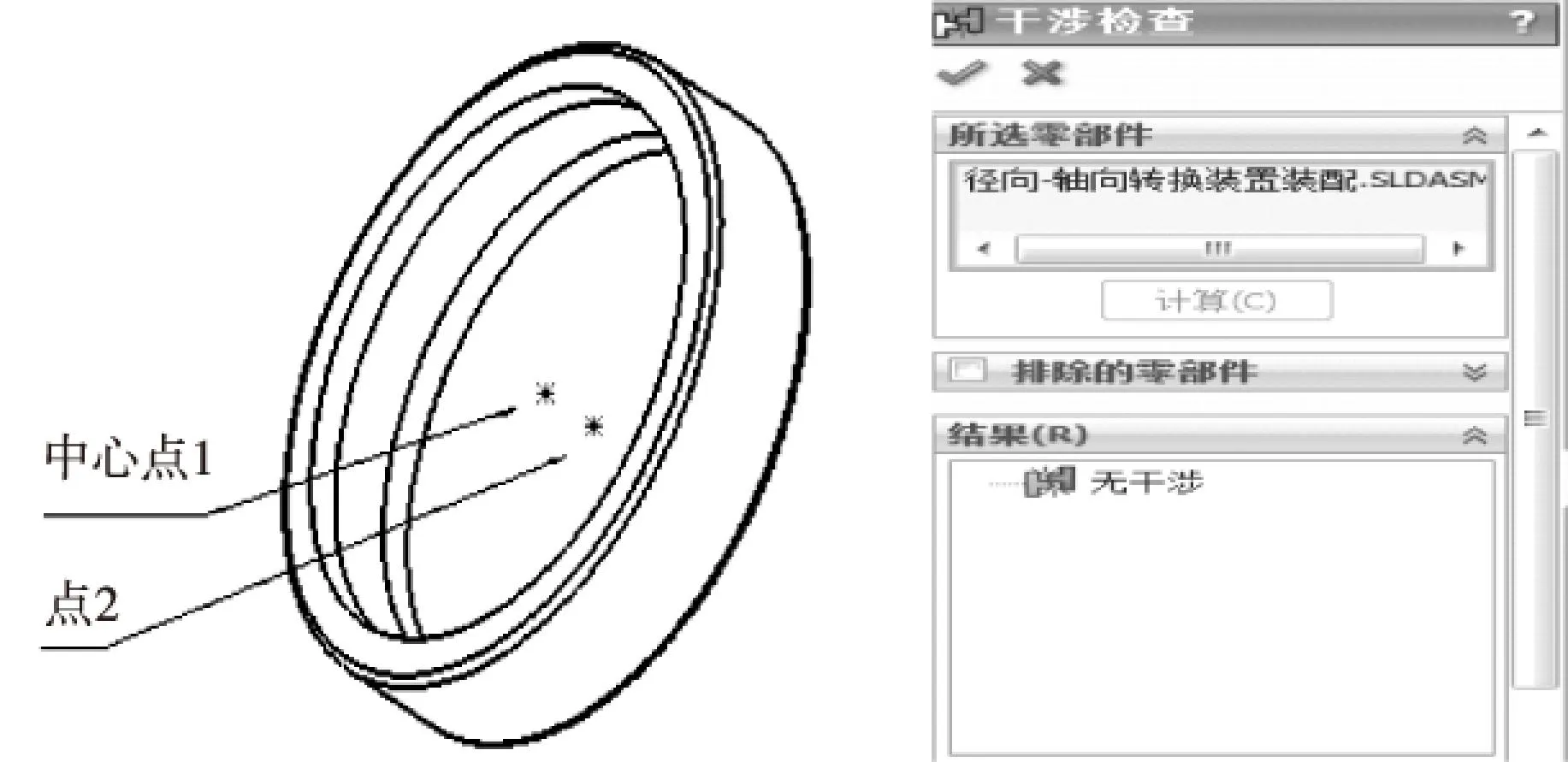
图2 轴承套圈上的空间点 图3 干涉检查
图3中干涉检查的结果显示无干涉,且三维模型中没有出现红色警告的部分,说明设计的转向机构满足装配要求,可以正确装配。
3运动仿真
利用SolidWorks中COSMOSMotion插件对上文建立的三维模型进行运动仿真分析,过程如下:
1)添加新算例在SolidWorks的“工具”菜单中载入COSMOSMotion插件[8],点击“添加新算例”;
2)选择材料在需要定义材料的零件上单击右键,在右键下拉菜单中选择“编辑材料”,零件1、零件2和零件3选择PPS塑料,轴承套圈选择45钢冷拔;
3)添加引力在运动算例菜单中点击“引力”选项,定义竖直向下引力,加速度9 806.65 mm/s2;
4)添加摩擦力 在运动算例的菜单中点击“接触”选项,选择接触的面组,系统会根据选择的材料和接触面自动计算出每时每刻的摩擦力;
5)运行模拟、显示结果 点击“计算”,软件会自动分析计算结果。轴承套圈运动出转向机构的速度(图4),加速度(图5),从仿真动画中可以看到轴承套圈可以按照预定的轨迹流畅的滑落下来,并且没有发生干涉现象。

图4 Z轴方向速度图5 Z轴方向加速度
4仿真结果分析
通过选定零件材料,添加引力,添加摩擦力,极度贴近实际的仿真计算,从得出的仿真动画中可以看出轴承套圈在重力和摩擦力的合力作用下沿着转向机构中3D曲线1和3D曲线2流畅的下滑,没有发生干涉现象,并且这两条3D曲线也起到限定轴承套圈位置状态的作用。
从图4和图5中可看出,轴承套圈运动出转向装置的速度为1 223 mm/s,加速度为3 200 mm/s2,轴承套圈从进入转向装置到运动出转向装置大约需要0.6 s的时间,大概在0.15 s的位置轴承套圈开始由XY平面的运动变成YZ平面的运动,由于惯性的作用,图中Z轴速度和Z轴加速度曲线都有一个突然的上升,满足实际情况。
设计人员可以根据仿真结果修改转向机构的曲面形状参数,从而改变轴承套圈运动轨迹和受力,则轴承套圈运动出转向机构的速度和加速度也会随之变化,最后得到满足生产实际的运动参数的设计即满足要求。
综上所述,本文首先在转向机构的结构和工作原理分析的基础上,利用SolidWorks进行三维建模和虚拟装配,虚拟装配结果显示设计中各个零件的主要参数和结构设计是合理的、正确的。然后对装配体进行干涉检查,结果显示无干涉且无错误警告,则表明转向机构各零部件设计合理,不存在零部件装配不进去的情况。接着利用COSMOSMotion插件对装配好的机构进行运动仿真,仿真出轴承套圈在转向机构中运动的仿真动画以及轴承套圈运动出转向机构时Z轴方向的速度和加速度曲线。从最后的仿真动画和Z轴方向速度和加速度曲线看出,轴承套圈的运动参数满足实际生产要求。至此,该转向机构的设计及仿真基本完成。
参考文献
[1]李星优,谢俊,全勇.基于SolidWorks建模的VBA创建曲线曲面设计[J].科技创新导报,2014,11(3):35-36.
[2]张军,李宪华.基于COSMOSMotion的凸轮推杆机构运动仿真[J].煤矿机械,2006,27(9):103-105.
[3]张海燕,韩丽娜.基于COSMOSMotion的偏心齿轮机构运动仿真[J].包装工程,2007,28(12):147-149.
[4]王秀玲.基于SolidWorks的齿轮三维造型方法研究[J].机械设计与制造,2006,44(4):93-94.
[5]薛辰.基于SolidWorks的齿轮三维设计的方法的研究[J].机电产品开发与创新,2010,23(3):88-90.
[6]管锋,周传喜,易先中,骆广.基于SolidWorks三曲柄单环减速器三维建模及环板的有限元分析[J].煤矿机械,2013,34(03):265-267.
[7]杨树川,邵金龙,杨术明,等.基于SolidWorks & SimMechanics的机构运动分析与仿真[J].河北工业科技,2011,28(4):221-225.
[8]李大磊,赵玉奇,张志林.SolidWorks高级功能与工程应用[M].北京:北京邮电大学出版社,2009.
Direction conversion mechanism design and simulation of bearing ring based on COSMOSMotion
PAN Zhen,QIU Wangbiao,LU Bowen,LI Yiting,LI Zhe
Abstract:This paper is about the design of the direction conversion mechanism of tunnel-based destressing device for alternating magnetic field. Using the SolidWorks 3D design software, we build the 3D model of the mechanism through such methods as stretching, excising, arraying, and scanning, then we simulate the 3D model based on the motion simulation plug-in COSMOSMotion to work out the speed and acceleration curve of the bearing ring so as to modify the design scheme according to the simulation results. Through 3D modeling and motion simulation, the vividness and visualization of the mechanism design are improved.
Keywords:SolidWorks; COSMOSMotion; simulation;3D modeling
收稿日期:2015-08-29 2015-08-04
通讯作者:赵立宏,男,教授。
作者简介:阮锐(1990-),男,江西省宜春市人,硕士研究生,研究方向:机电一体化系统与设计。 潘振(1989-),男,湖北黄冈人,贵州大学机械电子工程硕士研究生,主要从事机械设计及机电控制方面的理论研究。
基金项目:湖南省重大专项(2012FJ1007)资助。
中图分类号:TH122;TP391.9
文献标识码:A
文章编号:1002-6886(2016)01-0043-03
