一种基于角振动台的SINS加速度计通道频率特性测试方法
2016-04-13陈远才万彦辉张朝飞
陈远才,万彦辉,张朝飞
(中国航天科技集团公司 第十六研究所,西安 710100)
一种基于角振动台的SINS加速度计通道频率特性测试方法
陈远才,万彦辉,张朝飞
(中国航天科技集团公司 第十六研究所,西安 710100)
提出一种针对SINS加速度计通道的频率特性测试方法。该方法基于角振动台的正弦摇摆运动,利用加速度计的外杆臂效应实现对加速度计通道的率特性测试。该方法的关键在于加速度计的外杆臂参数标定和杆臂效应误差补偿计算,采用该文章提出的频率内标定方法以及双子样补偿计算公式,能很好地解决这些问题。通过理论分析和实验数据处理表明,该方法能够实现加速度计通道的频率特性测试,测试精度主要取决于外杆臂长度的标定精度。该方法操作方便,具有一定的参考价值。
捷联惯导系统;加速度计;频率特性;杆臂效应;角振动台
捷联惯导系统作为控制系统的一个惯性测量环节,其陀螺通道和加速度计通道的频率特性是一项重要的技术指标。对于陀螺通道的频率特性测试可通过角振动台实现,但对于加速度计通道的频率特性测试而言,则缺乏专门的测试设备。为弥补这一不足,常用的方法是分别对加速度计、加速度计测量通道的模数转换电路以及减振器进行单独的频率特性分析,然后再对整个通道的频率特性进行理论综合。采用这种方法能够在一定程度上对整个加速度计测量通道的频率特性进行评估分析,但是对于加速度计和减振器环节而言,准确的分析往往不容易实现,尤其是减振器环节,由于各批次的一致性问题,以及减振器的各向异性,导致对减振器环节的理论分析非常困难。因此需要研究一种能够直接对整个加速度计通道进行频率特性测试的方法。本文根据现有的测试条件,提出一种基于角振动台测试设备的频率特性测试方法。该方法只需在陀螺角振动测试流程的基础上增加三路加速度计通道信号的同步采集和一个低频的外杆臂标定环节,通过对加速度计的测试数据进行事后处理即可获得加速度计通道的频率特性。最后本文采用某型号光纤惯组进行了实验验证。
本方法的关键技术在于加速度计外杆臂参数的准确标定和外杆臂效应的补偿计算。目前已有许多文献研究了有关杆臂参数的标定和补偿等问题[1-3,6],但它们大多基于转台的旋转机动实现杆臂参数的激励。在数据处理上多采用从原始数据中分离或者从导航误差[4]中分离杆臂参数等方法。本文根据角振动台的运动特点,提出了一种独特的频域标定方法。该方法基于角振动台的正弦摇摆运动,首先将陀螺和加速度计原始数据转换到频域内,然后提取特征频率点,最后从特征频率点的幅值中实现杆臂参数的分离。该方法特别适用于角振动台设备,由于在参数分离时采用的是特征频率点的幅值,因此该方法能大幅度减小陀螺和加速度计噪声对杆臂参数分离的影响,从而能够保证在较短的时间内标定出较高精度的外杆臂参数。
1 测试原理分析
图1为捷联惯导系统在角振动台台面的安装示意图。在安装时,水平加速度计的敏感中心与角振动台的旋转中心将不可避免地存在一定的偏心,如图1所示以r表示偏心距。
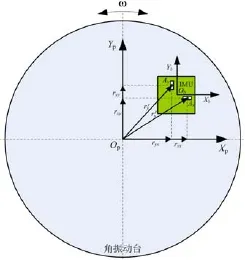
图1 捷联惯导系统在角振动台上的安装示意图Fig.1 Installation instruction of IMU the rolling table
事实上,受结构尺寸限制,加速度计的敏感中心与捷联惯导的坐标系原点并不重合,而是存在一定的内杆臂误差。因此捷联惯导系统中三只加速度计的敏感中心距角振动台旋转中心的位移是不相同的。为便于描述,下面定义几组坐标系:
● 惯性坐标系i[1]
地心惯性坐标系。原点 oi位于地心,xi轴、yi轴位于地球赤道平面内,xi轴指向春分点,zi轴沿地球自转轴,yi轴与xi、zi轴构成右手坐标系。
● 惯导坐标系b
捷联惯导坐标系。原点ob位于惯导质心,xb轴、yb轴、zb轴由惯性仪器敏感轴确定。在进行角振动测试时,捷联惯导系统的三只陀螺和加速度计已经进行了整机误差补偿。
● 台面坐标系p
角振动台台面坐标系。原点op位于角振动台旋转中心,xp轴、yp轴、zp轴是惯导坐标系坐标轴的无误差复现。
以x加速度计(Ax)为例,Ax的敏感中心处所受的比力为[2]:

式中:fx0p为角振动台静止时Ax敏感中心处所受到比力;fxp为角振动台摇摆时Ax敏感中心处所受到的比力;ω为捷联惯导系统相对于惯性空间的角速率;rxp为Ax敏感中心距op的距离,即外杆臂长度。
显然,由角振动台的摇摆运动所产生的附加比力应为:

此处假设x加速度计的敏感轴方向与惯导坐标系对应的坐标轴平行,则沿 Ax敏感轴方向所受的比力分量应为 [δf]x。若考虑更为一般的情况,则应为其中 a为Ax加速度计的敏感轴在b系内的x方向矢量。为便于说明,本文以第一种情况进行说明,两种情况的推导过程完全一样,则有:

考虑到摇摆运动的角速率远大于地球自转角速率,因此忽略地球自转角速率的影响,有:ω=[0 0 ω]T,则式(3)简化为:
从式(5)可以看出,Ax加速度计敏感的附加比力分量中包含两种频率分量,若能通过计算得到这两部分频率分量的理论输入,则就能实现对Ax通道的频率特性计算。Ax通道的输入输出框图如图2所示。
由系统的频率特性定义可知,Ax通道的幅频特性应为20·lo g(B1A1),相频特性应为φ1-φ0。从理论上讲,采用2倍摇摆频率的分量也能得到Ax通道的频率特性,但是受到实际能够产生的摇摆速率的限制,2倍摇摆频率分量很小,其激励效果不如1倍频分量,因此常采用1倍频率分量进行计算。
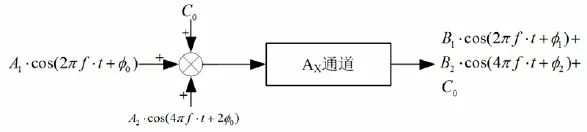
图2 Ax通道输入输出框图Fig.2 Input and output of Axchannel
2 外杆臂参数标定
外杆臂参数的标定是本方法的关键,外杆臂参数的标定精度直接关系到最终频率特性的测试精度,以至于成败。本文充分结合角振动台自身的特点以及捷联惯导系统做角振动实验时诸多限制,提出一种基于摇摆运动激励的频域标定方法。该方法通过在频域内提取加速度计由摇摆运动所产生的频率信息进行外杆臂计算,极大地减小了数据采集噪声对标定精度的影响,提高了标定精度。下面介绍具体的标定方法。

忽略低频摇摆下X加速度计通道的幅值衰减和相位延迟,从式(6)中不难发现,在角振动台输入速率ω已知的条件下,通过提取x加速度计输出数据中对应频率成分的幅值,则不难解出ω˙和 ω2前面的系数 N和N的值,也即得到Ax在p系内的外杆臂参数 rxx和rxy。
需要说明的是,以上标定过程是以加速度计的敏感轴方向与惯导坐标系对应的坐标轴平行为前提条件。若考虑更为一般的情况,则式(6)转化为如下形式:

式中:
同样令:

则最终的标定计算公式为:

另外两只加表的标定计算与其类似。
3 理论输入比力计算
从式(5)可知,若能计算输出A1和φ0,并从Ax加表的实际输出数据中分离出B1和φ1就能通过频率特性的定义公式进行频率特性计算。但在具体计算时却不直接这样做,因为采用这种直接计算的方法时φ0和φ1很难得到,而且幅值的计算精度不高。考虑到加速度计的输出是等间隔的连续采样,希望在计算加速度计的理论输入时也能和实际输出的步调保持一致,这样便于频率成分提取以及输入输出的幅值和相位比较。但若采用公式(2)进行理论输入比力计算,则将涉及到速率的微分,会产生误差放大效应。
本文在参考文献[5]的基础上,将角速率在两个采样时间间隔内用抛物线进行拟合,则可将公式(2)转化为角度增量的计算形式。该计算公式利用前一时刻和当前时刻的角度增量信息进行理论输入比力计算,称之为双子样计算公式,其中角度增量值取自角振动台在每一个采样时刻的角度增量输出。采用双子样计算公式即可实现在每一个采样时刻得到加速度计的理论输入比力,并与加速度计的实际输出在时刻上一一对应。在此前提下采用傅立叶变换法提取理论输入和加速度计实际输出的幅值和相位,并进行比较即可计算出加速度计通道的幅频和相频响应结果。
双子样计算公式的具体形式如下:
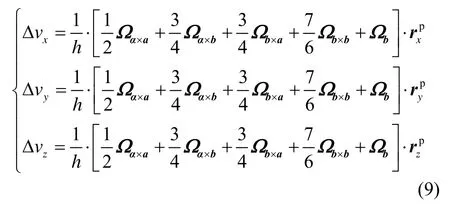
式中:Δvx、Δvy、Δvz分别为三只加速度计的理论速度增量;h为2倍的采样周期。

其中: Δθ1为前一时刻角振动台的角度增量、 Δθ2为当前时刻角振动台的角度增量
4 实验结果
采用某型号光纤捷联惯导系统进行角振动试验,其中加速度计为石英挠性加速度计,采集电路为二元模数转换电路,减振器为梯形减震器,采用整机外部减振。在安装时,人为将捷联惯导系统偏离角振动台旋转中心一定距离(注意偏离距离要适中,否则摇摆时转台振动很大),以z轴摇摆为例,此时可测试x和y加速度计通道的频率特性。
安装完成后,让角振动台分别以0.5 Hz、5 Hz、15 Hz、30 Hz、50 Hz、70 Hz、90 Hz的频率点以及30 (º)/s的角速率进行摇摆,选择0.5 Hz的频率点进行外杆臂标定。
表1为x、y加速度计外杆臂参数的标定结果,由于捷联惯导系统在角振动台台面上安装具有随意性,因此无法事先测量实际的外杆臂长度。为验证标定结果的准确性,利用标定得到的外杆臂参数对,x、y加速度计进行理论比力计算,得到理论比力和实测数据的对比图,见图 3。将实测数据减去理论计算比力并进行频谱分析得到补偿前和补偿后的频谱图,见图4。
从频谱图图4不难看出,x、y加速度计在补偿后的频谱图中,0.5 Hz与1 Hz频率点处的频谱基本消失,经计算,幅值衰减为 36 dB。由此可见,外杆臂参数的标定结果是较为准确的。
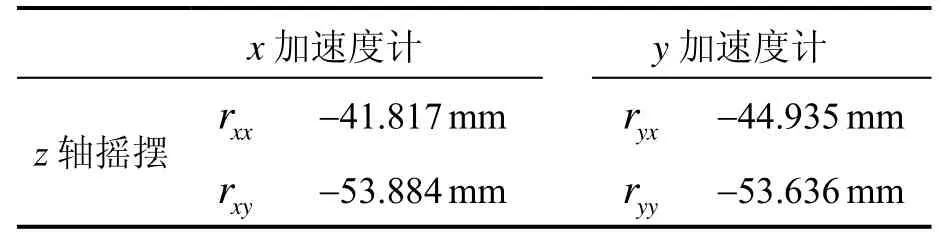
表1 x、y加速度计外杆臂参数Tab.1 Outer lever arm length for x and y accelerators

图3 Ax、Ay通道理论比力与实测结果对比(0.5 Hz)Fig.3 Contrast between theory calculation and experiment data for Axand Aychannels (0.5 Hz)

图4 Ax、Ay通道补偿前与补偿后的频谱对比(0.5 Hz)Fig.4 Frequency spectrum contrast between non-compensation and compensation for Axand Aychannels (0.5 Hz)
采用本文提出的计算方法得到x、y加速度计通道在各频率点下的幅值衰减和相位延迟,详见表2。图5为x、y加速度计通道频率特性曲线。从频率特性结果不难看出x加速度计通道与y加速度计通道的频率特性是存在差异的。可见采用传统的分析方法是不准确的。遗憾的是,目前没有一种标准的测试方法可以用来验证本方法所测得结果的准确精度。
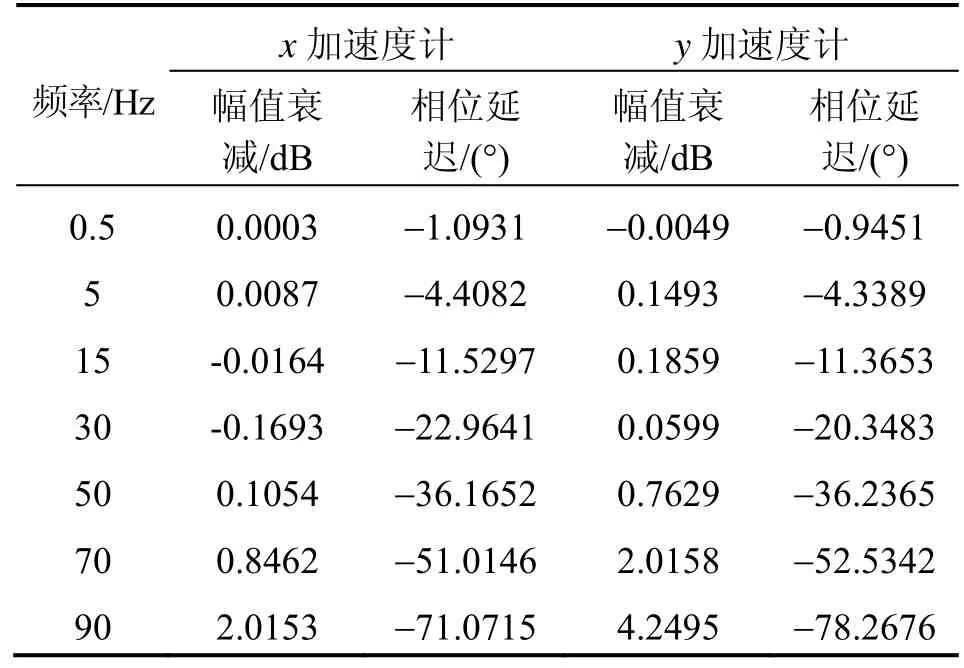
表2 Ax、Ay加速度计通道在各频率点下的频率特性Tab.2 Frequency responses at each frequency point for Axand Aychannels
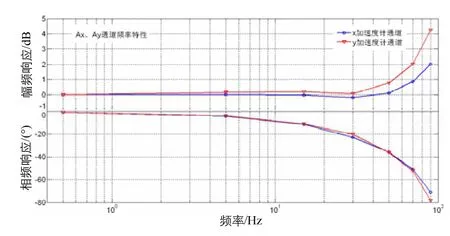
图5 Ax、Ay通道的频率特性曲线Fig.5 Frequency response curves for Axand Aychannels
依据理论推导,从公式(9)不难看出,外杆臂参数的标定精度将直接影响加速度计理论比力的计算精度,从而影响频率特性的测试精度。因此,为保证测试结果的精度,从理论上讲应首先尽可能的保证加速度计外杆臂参数的标定精度。此外,角振动台台面的不水平误差也将会影响加速度计幅频特性的测试精度,但角振动台台面的水平精度一般控制在1′以内,其影响是小量,且不难分析,其带来的误差在整个频段内近似常值,因而不会对我们评判加速度计的频率特性产生较大影响。
5 结 论
本文提出了一种针对加速度计通道的频率特性测试方法。该方法首先通过低频摇摆标定出外杆臂长度,然后联合角振动台的角度增量值计算出加速度计在各频率点下的理论输入;之后采用傅立叶变换分别提取理论输入和加速度计实际输出中的摇摆频率成分,并最终由系统的频率特性定义计算得到加速度计通道的频率特性结果。该方法的关键在于加速度计外杆臂参数的精确标定,其决定了最终频率特性的测试精度。此外,加速度计在各频率点下理论比力计算方法也至关重要。通过具体试验表明该方法切实可行,测试结果具有一定的参考价值。
(References):
[1] 谢波, 秦永元, 万彦辉, 等. 捷联惯导系统尺寸效应分析与补偿[J]. 中国惯性技术学报, 2012, 20(4): 414-420. Xie Bo, Qin Yong-yuan, Wan Yan-hui, et al. Analysis and compensation for size effect of strapdown inertial navigation system[J]. Journal of Chinese Inertial Technology, 2012, 20(4): 414-420.
[2] 江奇渊, 汤建勋, 袁宝伦, 等. 激光陀螺捷联惯导尺寸效应误差分析与补偿[J]. 激光与光电应用技术, 2015, 44(4): 110-114. Jang Qi-yuan, Tang Jian-xun, Yuan Bao-lun, et al. Analysis and compensation for size effect error of laser gyro strapdown inertial navigation system[J]. Infrared and Laser Engineering, 2015, 44(4): 110-114.
[3] 游金川, 秦永元, 杨鹏翔, 等. 捷联惯导加速度计尺寸效应误差建模及其标定[J]. 宇航学报, 2012, 33(3): 311-317. You Jin-chuan, Qin Yong-yuan, Yang Peng-xiang, et al. Modeling and calibration of the accelerometer size effect error of the SINS[J]. Journal of Astronautics, 2012,33(3): 311-317.
[4] 严恭敏, 周琪, 翁浚, 等. 捷联惯导系统内杆臂补偿方法及试验验证[J]. 宇航学报, 2012, 33(1): 62-67. Yan Gong-min, Zhou Qi, Weng Jun, et al. Inner lever arm compensation and its test verification for SINS[J]. Journal of Astronautics, 2012, 33(1): 62-67.
[5] Seong-hoon P W, Farid G. A triaxial accelerometer calibration method using a mathematical model[J]. IEEE Transactions Instrumentation and Measurement Society, 2010, 59(8): 2144-2153.
[6] Zhu Lufeng, Zhang Chunxi. The fine system level calibration technique of size effect error for the fiber-SINS[C] //2010 international conference on Electrical Engneering and Automatic Control. 2010: 1360-1363.
[7] Hong S, Lee M H, Chun H H, et al. Experiment study on estimation of level arm in GPS/INS[J]. IEEE transaction on vehicular technology, 2006, 55(2): 431-448
[8] Tan C W, Park S. Design of accelerometer-basd inertial navigation systems[J]. IEEE Transactions on Instrumentation and Measurement, 2005, 54(6): 2520-2530.
[9] Hong S, Lee M H, Kwon S H. A car test for the estimation of GPS/INS alignment errors[J]. IEEE Transactions on Intelligent Transportation systems, 2004, 5(3): 208-218.
[10] He X F, Liu J Y. Analys is of lever arm effects in GPS/ IMU integration system[J]. Transactions of Nanjing University of Aeronautics & Astronautics, 2002(1): 59-64.
Test method for frequency characteristics of accelerator channel in SINS based on rolling table
CHEN Yuan-cai, WAN Yan-hui, ZHANG Zhao-fei
(The 16thInstitute, China Aerospace Science and Technology Corporation, Xi’an 710100, China)
In view of the accelerator channels in SINS, a test method for their frequency characteristics is proposed. Based on the rolling motion generated by angular vibration table, this method can complete the frequency characteristic test of accelerator channels by using outer lever arm effects of the accelerator. The calibration and compensation of outer lever arm are key to this method. By using the frequency-domain calibration method and the two-sample iteration algorithm proposed in this paper, these key problems can be perfectly solved. Theory analysis and experiment data processing show that this method can realize the frequency characteristic test of accelerometer channels, in which the precision of frequency characteristic test lie on the calibration accuracy of outer lever arm length. The method is easy to operate and has reference value.
SINS; accelerator; frequency characteristics; lever arm; rolling table
U666.1
:A
2016-02-14;
:2016-05-20
国家高技术研究发展计划(863计划)(2006AA12Z319)
陈远才(1987—),男,工程师,从事SINS测试技术研究。E-mail: cyc_1987@126.com
联 系 人:万彦辉(1969—),男,研究员,主要从事捷联惯导方向研究。
1005-6734(2016)03-0291-05
10.13695/j.cnki.12-1222/o3.2016.03.003