一种基于径向充磁的霍尔式新型角度传感器
2016-04-12王新峰许彬彬戴立业张金辉陈文芗
王新峰,许彬彬,戴立业,张金辉,陈文芗
(厦门大学物理与机电工程学院,福建厦门361005)
一种基于径向充磁的霍尔式新型角度传感器
王新峰,许彬彬,戴立业,张金辉,陈文芗*
(厦门大学物理与机电工程学院,福建厦门361005)
摘要:利用径向磁铁的磁感应强度沿径向同心圆正弦分布的特点,设计了一款新型角度传感器.分析了基于线性霍尔元件和径向充磁的角度测量原理,给出了角度计算方法,并设计制作了角度传感器.实验表明,该角度传感器结构简单,测量重复性好,绝对误差小于0.3°.
关键词:角度传感器;霍尔元件;嵌入式系统;径向磁铁
目前角度传感器主要有传统的接触式、光电式和磁电式3种形式.传统的接触式角度传感器有应用广泛的电位计式角位移传感器,这种传感器结构简单,操作方便,价格低廉,性能稳定,其原理是通过触头改变电阻实现的;但是这种传感器极易磨损,长时间使用后会产生较大误差,因此其测试性能不高,动态响应差,使用寿命短,需要经常检验其性能,更换频繁,给使用方带来极大不便[1].光电式角度传感器种类繁多,有光栅式、激光式等各类光电器件结合的光电式角度传感器,其中激光式角度传感器测量精度高,工作可靠,成本较低,实用性较强;但是其结构复杂,体积较大,用到的光学仪器较多,对激光光线要求严格,对检测对象也有特别的要求,因此其应用领域受限[2-3].其他光电式角度传感器虽然测量比较精确,但大多对环境要求非常苛刻,抗振性差,安装要求高,且价格昂贵,因此也不适合大量的普及使用[4-6].
磁电式角度传感器测量精度高,成本低,安装方便,便于维护和管理,使用寿命长,是当前角度传感器发展的重要方向.磁电式角度传感器有采用集成芯片的角度传感器,但其所采用芯片多价格昂贵,且对外围电路要求严格[7].本文所介绍的基于径向充磁的霍尔式角度传感器,利用线性霍尔元件及径向磁铁进行测量,通过嵌入式系统进行数据的采集与处理,结构简单_,操作方便,价格低廉,克服了接触式角度传感器以及光电式角度传感器的诸多缺点,是一种比较理想的角度传感器.
1传感器测量原理
沿半径方向充磁的磁铁称径向磁铁.图1是径向圆柱形磁铁立体示意图,图中矢量M表示磁场的磁化强度,方向如图中箭头的指向.
径向磁铁表面磁感应强度可用等效磁荷法计算得到,具体算法为:如图1建立坐标系,以径向充磁磁铁体积中心点为原点,磁铁轴线为z轴,磁化方向为y轴,N、S两极半圆分界线为x轴建立坐标系,空间任意点磁场强度的z轴分量满足以下关系[8-9]:

其中,M0为磁化强度,Ra为圆柱体端面半径,za为圆柱体高的1/2.
图2所示为径向磁铁的主视图、侧视图及其磁感应线分布[10-12],沿径向分开的两个半圆分别是N、S磁极.在R≤Ra/2,且离端面距离δ≤0.5 mm的空间部分,可以近似认为磁力线分布是均匀的[7].
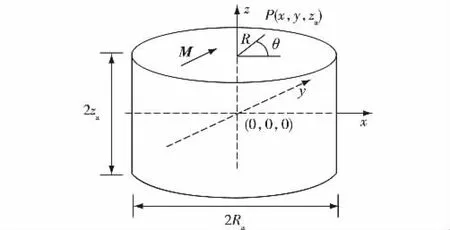
图1径向磁铁坐标系建立示意图Fig.1 Schematic diagram of the radial magnet coordinate system
考虑在距磁铁径向端面za的平面上,点P( x,y,za)以半径R的同心圆绕z轴旋转,在R≤Ra/2条件下,可应用公式( 1)计算点P的磁感应强度.如果重新建立柱坐标系(ρ,θ,h),P点绕z轴运动的同心圆轨迹上两个坐标系关系为: x=Rsinθ,y=Rcosθ,z=za,R2=x2+y2.将其带入式( 1),整理后可得到P点磁感应强度为

式中,M0为磁化强度,μ为磁导率,k是与P点运动半径R、磁铁高度za、磁铁半径Ra相关的系数.
当径向磁铁表面P点以半径R绕z轴旋转一周时,其磁感应强度以正弦规律变化一个周期.反之,如果P点不动,径向磁铁绕z轴旋转一周,其磁感应强度同样变化一个正弦周期.由以上分析,假如在P点放置一个线性霍尔元件,则这个霍尔元件将会输出一个呈正弦周期变化的电压信号,根据此正弦电压信号利用正弦反函数可求得径向磁铁旋转的角度,由此即可实现角度测量.反正弦函数α=arcsin u的值域为[-90°,90°],故一个霍尔元件只能求得[-90°,90°]范围内的角度,无法实现[0,360°)范围内的角度测量,因此为了实现[0,360°)范围的测量,至少需要2个相互垂直的霍尔元件进行测量.
为了更精确地进行全范围角度的测量,将4个霍尔元件( U1~U4)在磁铁正下方( R≤Ra/2)的任一圆周上相隔90°安装如图3( a),且4个霍尔元件与磁铁端面距离小于0.5 mm,因此霍尔元件可感应磁铁均匀的按正弦变化的磁场.搭建实验装置对4个霍尔元件进行测试,发现其输出波形如图3( b)所示.这里所用霍尔元件选用型号AH49E的线性霍尔元件,这种霍尔元件线性度好,功耗低,灵敏度高,输出电阻小,温度稳定性好,寿命长,且价格低廉,适合测量磁场强度,因此可以满足角度测量.
图中U1、U2、U3、U4存在直流分量,是线性霍尔器件的直流偏置,经过隔直处理,U1、U2、U3、U4表达式如下:
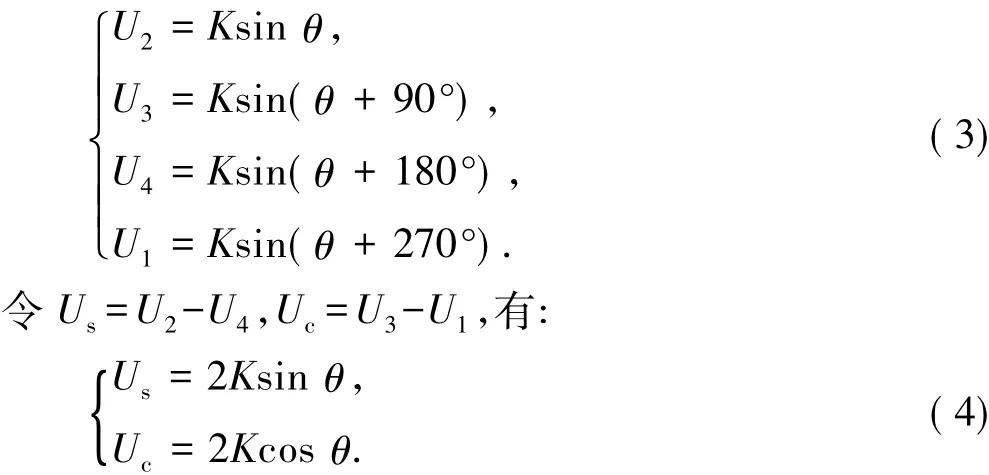
其中K是一个与径向磁铁、霍尔元件、运动半径和高度相关的常数.

图2径向磁铁及磁感应线分布[10-12]Fig.2 The radial magnet and its magnetic flux line[10-12]
通过式( 4)结合反正弦函数即可解出角度.

图3相隔90°安装的霍尔器件( a)及其输出电压波形( b)Fig.3 90°apart-installed Holzer components ( a) and their output voltage waveform ( b)
2传感器设计及角度计算
传感器硬件部分主要由信号采集模块、CPU模块、液晶显示模块和电源模块组成.信号采集模块将采集霍尔元件输出的电压信号,此信号经AD转换将数据送至CPU模块; CPU模块利用嵌入式系统[13]对AD转换的数据进行处理,最后将得到的角度值送至液晶显示模块显示;液晶显示模块利用1602LCD(液晶显示器)显示屏显示;电源模块为整个系统供电.
图4是传感器结构图及实物图,径向磁铁安装在旋转轴下方靠近电路板处,4个霍尔元件安装在径向磁铁的正下方,磁铁与霍尔元件相对位置关系如图3 ( a)所示.旋转轴旋转时,霍尔元件拾取径向磁铁相对位置的变化,经电路处理,由接线插头输出相应电压Us、Uc.
根据式( 4),调用C语言自带的反正弦函数以求得角度θ.由于正弦函数是多值函数,计算时需确定所在象限,实际应用时可通过Us、Uc的正负来确定θ所在象限,确定了具体象限后就可根据所在象限将多值函数变为单值函数.计算过程如下:令α=arcsin us,此处us=Us/2K,如果Us>0且Uc>0,则所求角度θ在第一象限,即θ=α;如果Us>0且Uc<0,则所求角度θ在第二象限,即θ= 180°-α;如果Us<0且Uc<0,则所求角度θ在第三象限,即θ= 180°-α;如果Us<0且Uc>0,则所求角度θ在第四象限,即θ= 360°+α.计算流程图如图5所示.
3实验结果
为验证所设计传感器的精度及重复性,将一个角度刻度盘安装在传感器上,用于测量传感器旋转轴旋转角度,如图6所示.传感器输出经A/D变换后送入嵌入式系统,嵌入式系统利用传感器送入的数据根据图5流程计算出测到的角度值,最后将角度值通过LCD显示屏显示.

图4径向磁铁霍尔角度传感器结构图( a)及实物图( b)Fig.4 The angle sensor's structure diagram ( a) and physical diagram ( b)
径向磁铁的N、S两极分界线处磁感应强度为0,当磁铁旋转至此位置时传感器应输出角度0°或180°,因此为消除系统误差,和径向磁铁安装在一起的指针在固定时应该与N、S两极的分界线共线,这样才可保证角度刻度盘的0°正好对应传感器的零位角度,角度刻度盘与固定指针的径向磁铁的位置如图7所示.

图5径向磁铁霍尔角度传感器角度计算流程图Fig.5 The angle sensor's angle measuring flow chart
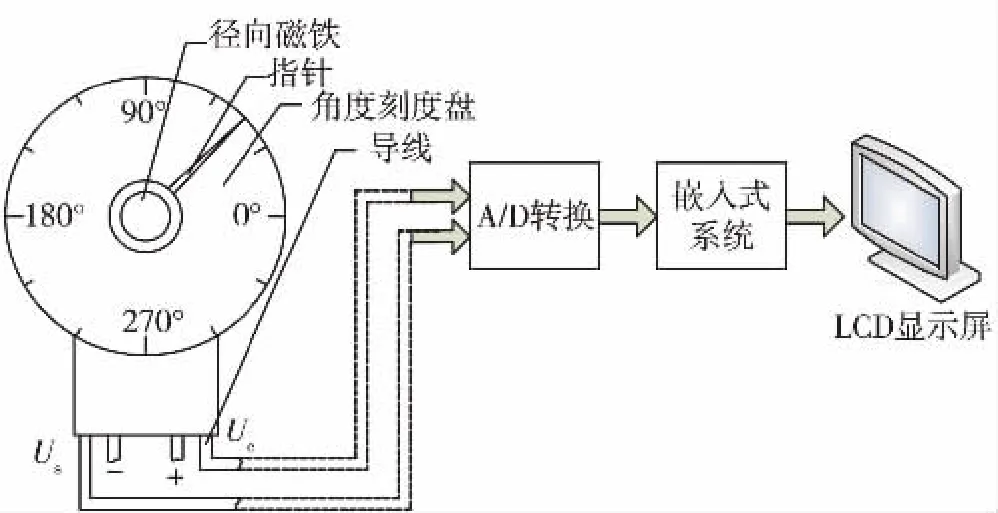
图6实验测试方案示意图Fig.6 The diagram of the test scheme
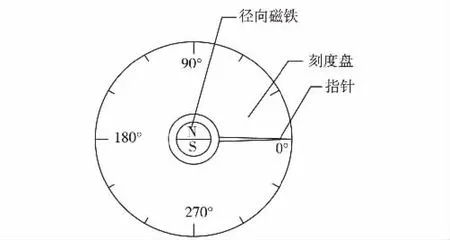
图7固定指针的径向磁铁及刻度盘Fig.7 The radial magnet fixed a pointer and the dial
角度传感器做成后,进行实验测试,实验测试过程如下:将旋转轴沿逆时针方向转动,每隔10°记录下刻度盘显示的实际角度值A和传感器输出信号经计算后得到的角度值A1.为了考察传感器的重复性,以同样的方法测量5次,图8为测试结果( A1~A5).图中可看到: 1)实际角度值A与传感器输出信号计算后得到的角度值重合度好、线性好,表明传感器输出信号能够正确反映实际角度变化; 2)各次测量结构的重合度好,表明传感器重复性好.
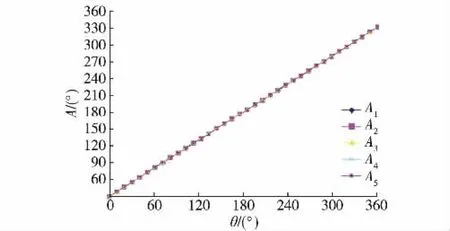
图8传感器测试结果Fig.8 Diagram of the sensor's test results
为了进一步考察传感器的测量精度,定义绝对误差Ea= |Ai-A|,i= 1,2,…,5,图9是绝对误差分析结果,由图可知: 1)绝对误差均小于0.3°,测量误差小; 2)各次测量过程测量误差分布呈现随机特性,不存在某个区间误差特别大或者特别小的现象,表明传感器不存在结构上的测量误差诱因; 3)误差分布均匀,即小角度区间的测量误差与大角度区间的测量绝对误差是一样的,因此小角度区间的测量相对误差要大于大角度区间的测量相对误差,这个特点表明这种类型的传感器更适合于测量角度相对大的测量领域.
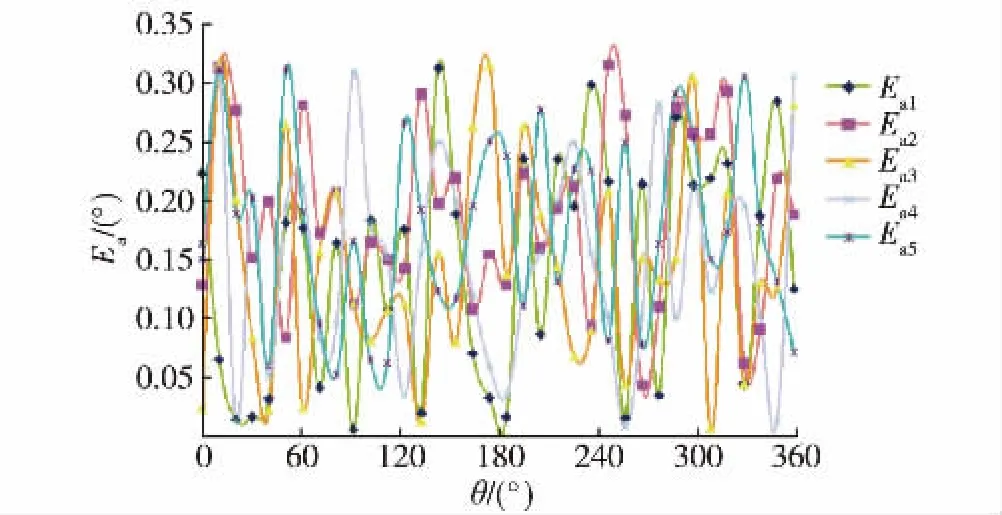
图9传感器测试结果误差示意图Fig.9 Error diagram of the sensor's test results
通过以上分析可看出,角度传感器测量值与实际值还是有一定的误差,引起这些误差的原因有很多,但主要原因是:霍尔元件安装偏差,没有准确将霍尔元件安装在磁铁正下方的圆周上;在旋转磁铁的过程中,出现手抖动以及视线偏移的情况.
4结论
本文介绍的基于径向充磁的霍尔式角度传感器具有结构简单,安装方便,成本低廉,测量精度高,稳定性好等优点.这种角度传感器克服了接触式角度传感器容易磨损的缺点,也没有光电式角度传感器对环境等要求高.实际使用中,这种角度传感器可利用嵌入式系统控制及进行角度计算;嵌入式系统在C语言编程上可以直接调用反正弦函数,灵活方便,克服了查表法、迭代法以及级数法等算法的步骤繁琐复杂,而且需求资源多、耗费时间长等缺点.而且这种角度传感器还可以进一步集成.因此可大幅度减小空间,节约资源,是一种比较理想的角度传感器.
参考文献:
[1]郭华玲,孟立凡,冯伟.电位计式角位移传感器测试系统的动态性能研究[J].陕西科技大学学报,2010,28( 6) : 87-89.
[2]曹茂盛,刘兵.激光角度传感器及其在风洞模型中的应用[J].仪器仪表学报,1996,17( 2) : 62-66.
[3]王启东,陈纯坤.激光动态角度测量系统研究[J].光子学报,1995,24( 1) : 68-71.
[4]邓晓旭,苗瑞.光栅角度传感器干涉计量原理[J].森林工程,2000,16( 4) : 30-31.
[5]范淑媛,熊永红.分光计的数字化改造[J].实验室研究与探索,2011,30( 9) : 234-236.
[6]余金栋.基于步进电机的角度测量及其在帆板控制系统中的应用[J].机电工程技术,2012,41( 7) : 129-132.
[7]赵允喜.电动助力转向系统角度传感器的研究[D].武汉:武汉理工大学,2012: 8-9.
[8]李景天,宋一得,郑勤红,等.用等效磁荷法计算永磁体磁场[J].云南师范大学学报,1999,19( 2) : 33-36.
[9]周耀忠,唐申生.任意形状通电线圈磁场的计算[J].海军工程大学学报,2009,21( 3) : 71-74.
[10]李晓阳,徐金伟,刘宏娟.矩形永磁体三维磁场空间分布[J].北京工业大学学报,2008,34( 1) : 1-5.
[11]王瑞凯,左洪福,吕萌.环形磁铁空间磁场的解析计算与仿真[J].航空计算技术,2011,41( 5) : 19-23.
[12]刘宏娟.矩形永磁体三维磁场空间分布研究[D].北京:北京工业大学,2006.
[13]刘建清,孙保书,李凤伟,等.轻松玩转AVR单片机C语言[M].北京:北京航空航天大学出版社,2011: 307-318.
A New Type of Angle Sensor Based on Radial Magnetizing and Hall Elements
WANG Xinfeng,XU Binbin,DAI Liye,ZHANG Jinhui,CHEN Wenxiang
( School of Physics and Mechanical&Electrical Engineering,Xiamen University,Xiamen 361005,China)
Abstract:In this paper an angle sensor is designed to take advantage of a radial magnet whose magnetic flux density is assumed to be a Sine distribution along the magnet's radial-concentric circle.This paper analyzes the principle of angle measurement that is based on linear hall elements and radial magnetizing,offers the angle calculation method,and designs the angle sensor.Experiments illustrate that the angle sensor exhibits a simple structure and a good performance of repeatability,and the angle sensor's absolute error is less than 0.3°.
Key words:angle sensor; Holzer components; embedded system; radial magnets
*通信作者:wxchen@ 163.com
基金项目:福建省科技厅计划项目( 2014H6026)
收稿日期:2015-03-12录用日期: 2015-07-03
doi:10.6043/j.issn.0438-0479.2016.01.024
中图分类号:TH 712
文献标志码:A
文章编号:0438-0479( 2016) 01-0126-05
引文格式:王新峰,许彬彬,戴立业,等.一种基于径向充磁的霍尔式新型角度传感器[J].厦门大学学报(自然科学版),2016,55 ( 1) : 126-130.
Citation: WANG X F,XU B B,DAI L Y,et al.A new type of angle sensor based on radial magnetizing and hall elements[J].Journal of Xiamen University( Natural Science),2016,55( 1) : 126-130.( in Chinese)
