基于自动照准全站仪的精密三角高程测量代替二等水准测量的研究与应用
2016-04-11欧海平刘业光
孔 宁,林 鸿,欧海平,刘业光,罗 峰
(广州市城市规划勘测设计研究院,广东 广州 510060)
基于自动照准全站仪的精密三角高程测量代替二等水准测量的研究与应用
孔宁,林鸿,欧海平,刘业光,罗峰
(广州市城市规划勘测设计研究院,广东 广州 510060)
Research and Application of Precise Trigonometric Leveling to Replace Second-order Leveling Based on Intelligent Total Station
KONG Ning,LIN Hong,OU Haiping,LIU Yeguang,LUO Feng
摘要:随着测绘新技术的发展及高精度自动照准全站仪的出现,传统高程传递的作业模式具备了改进的空间,本文对基于自动照准全站仪的精密三角高程测量代替二等水准测量方法进行了深入研究,经理论推导、精度分析和实际应用,基于自动照准全站仪的精密三角高程测量成果完全满足国家二等水准测量精度要求。
关键词:自动照准全站仪;精密三角高程测量;二等水准测量;精度分析
传统几何水准测量的高程传递具有测量精度高、操作简单等缺点,但其测量视线短、速度慢、劳动强度大、易受气象条件影响等缺点,使其作业效率难以提高。三角高程测量路线灵活、速度快、劳动强度小,但由于受球气差等的影响,测量精度较低。基于此,许多专家学者相继对三角高程测量代替二等水准测量的可能进行了深入研究[1-3]。本文采用两台高精度自动照准全站仪(测量机器人)进行同时段对向观测,极大地消减了球气差的影响,在路线传递过程中进行偶数测边的对向观测,起、末点对中杆高度不变,避免了丈量仪器高和对中杆高带来的误差影响。笔者通过对该技术的理论推导、精度分析,论证了该技术的可行性,最后将该技术应用于实际工程,成果精度完全满足国家二等水准测量的精度要求。
一、精密三角高程测量
1. 观测方程
基于自动照准全站仪的精密三角高程测量,将改装后的棱镜分别固定在两台仪器的把手上,进行同时段对向观测。一个测段的传播示意图如图1所示。

图1 精密三角高程测量路线图
图1中,A、B间高差为
hAB=hA1+h1N+…+hNB
(1)
仪器在位置1对A点棱镜进行观测,平距为D1A,在位置N对B点棱镜进行观测,平距为DNB,VA、VB分别为对中杆棱镜中心与起、末水准点之间的垂直距离,α1A、αNB为观测垂直角,受仪器轴系误差影响,在精密三角高程代替二等水准测量时,观测垂直角不得超过10°[4]。当D1A≤20 m,DNB≤20 m时,可以不考虑球气差和垂线偏差等影响[1],则hA1、hNB分别为
hA1=-D1Atanα1A
(2)
hNB=DNBtanαNB
(3)
在位置1,2,…,N上仪器照准中心与其把手上棱镜中心之间高差为V1,V2,…,Vn。因此,位置1、位置2上两仪器照准中心之间的高差h12为

(4)
整理后得
(5)
式中,α12、α21为位置1、位置2的垂直观测角;M21、M12、f12、f21为两仪器在位置1与位置2时对向观测的垂线偏差和球气差改正值。根据三角高程严密计算公式[5],在非高山地带可以不考虑垂线偏差的影响[5-7];球差可以通过对向观测取均值抵消;在气象条件变化均匀时段进行同时段对向观测,且对向观测点间的气象条件相差不大时,可认为气差对对向观测高差值的影响大致相反[8],气差在这里也基本消除。
因此,式(5)可简化为
(6)
高程传递时候,将位置1上的全站仪迁至位置3,对向观测位置2的棱镜,两仪器照准中心高差为
(7)
在一个测段高程传递过程中,V1=V3,V2=V4,…,VA=VB,则
hAB=-D1Atanα1A+0.5(D12tanα12-D21tanα21)+

(8)
式(8)即为基于自动照准全站仪的精密三角高程测量传递公式,式中消除了球差,消减了气差影响,同时避免了量取仪器高和对中杆高带来的误差。
2. 精度分析
对式(1)全微分得
(9)
式中
(10)
其中


(11)
假设一个测段中每一个对向观测边的测边、测角均相等,观测条件也相等,即
则每一个对向观测获得高差的精度也相等。
因此可得
(12)
(13)



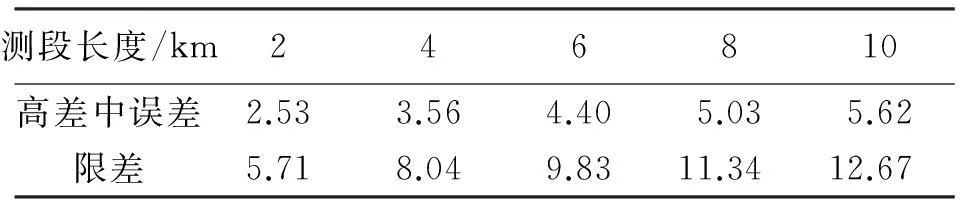
表1 测段高差中误差统计 mm
由表1可知,基于自动照准全站仪的精密三角高程测量,在观测高度角不超过10°,测距≤1000 m的情况下,使用测角精度为0.5″、测距精度为0.6 mm+1×10-6D、ATR测距精度为1 mm的仪器,成果完全满足二等水准测量的精度要求。
本文精度分析是在假设仪器设站无整平误差、对中杆无整平误差等情况下进行的,但若设站次数过多、测段长度过长,成果精度都将降低。
二、工程应用
1. 项目概述
GZCORS硬件升级需对7个基准站进行高程联测,联测成果需达到二等水准精度要求(如图2所示)。采用基于自动照准全站仪的精密三角高程测量方法进行高程传递,降低了劳动强度,提高了作业效率。

图2 GZCORS基准站之一的高程联测路线
2. 项目实施
(1) 设备投入
根据项目需要,投入Leica TM30自动照准全站仪两台、强制对中杆一套、高低棱镜组两组、外业观测手簿两台、手持气象仪两台、对讲机两台等仪器设备(如图3所示)。

图3 仪器设备
(2) 路线选定
外业实测前,由经验丰富的测量人员选定高程传递路线,确定每站仪器架设的大致位置,较优的传递路线可大大提高作业效率。高程传递路线应避免通过行人车辆频繁的道路上,仪器架设处应避开地面震动地段和松软的土质地段,观测视线内不宜出现草、树叶、电线等引起旁垂直折光影响的物体。
(3) 外业观测
一个测段的作业流程如图4所示。

图4测段作业流程
3. 成果分析
经计算,GZCORS 7个基准站的高程联测闭合差计算统计结果见表2。
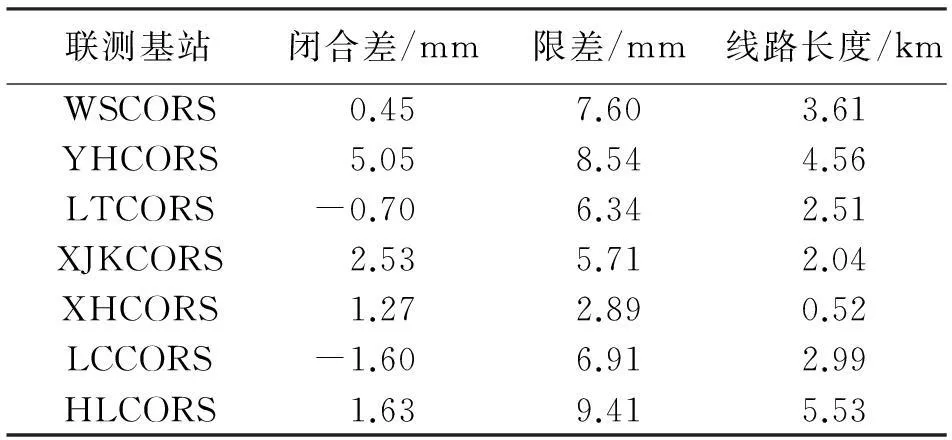
表2 闭合差统计
分别对以上测段内较长的对向观测边的高差进行高差中误差计算,统计结果见表3。

表3 高差中误差
通过以上计算分析,GZCORS 7个基准站的高程联测成果精度较好,满足国家二等水准测量精度要求。
三、结束语
本文对基于自动照准全站仪的精密三角高程测量代替二等水准测量进行了详细阐述,并对其进行了精度分析,论证了这一方法的可行性,最后通过工程应用验证了该技术的可行。
值得注意的是,本文对其闭合差的计算均是按传统几何水准测量规范的限差要求进行的,若水准网内使用的高程传递方法既有传统几何水准测量,又有精密三角高程测量,则数据处理时如何进行取权平差和精度评定,还有待作进一步的深入研究。同时,笔者呼吁在进一步完善该技术相关技术指标及后期数据处理等相关内容后,尽快完善相关规范标准的制定。
参考文献:
[1]张正禄,邓勇,罗长林,等.精密三角高程代替一等水准测量的研究[J].武汉大学学报(信息科学版),2006,31(1): 5-8.
[2]徐亚明,施斌,王代雄,等. 改进的三角高程法在跨海高程传递中的应用[J].测绘通报,2014(4): 65-67.
[3]邹进贵,朱勇超,徐亚明.基于智能全站仪的机载精密三角高程测量系统设计与实现[J].测绘通报,2014(3): 1-5.
[4]中华人民共和国铁道部. 高速铁路工程测量规范:TB 10601—2009[S]. 北京:中国铁道出版社,2009.
[5]佩利年 A.理论大地测量学[M].北京:测绘出版社,1983.
[6]张赤军. 测距三角高程中的垂线偏差问题[J].测绘学报,1997,26(1):58-64.
[7]曾志元. 高山区垂线偏差对三角高程的影响及其消减途径的探讨[J] 勘察科学技术,1986(4):51-55.
[8]梅文胜.测量机器人开发与应用[M]. 武汉: 武汉大学出版社,2011: 49-55.
[9]中国国家标准化管理委员会. 国家一、二等水准测量规范:GB/T 12897—2006[S].北京:中国标准出版社,2006.
[10]梁振英,董鸿闻,姬恒炼.精密水准测量的理论和实践[M]. 北京:测绘出版社,2004:109-157.
中图分类号:P258
文献标识码:B
文章编号:0494-0911(2016)02-0107-03
作者简介:孔宁(1983—),男,硕士,工程师,主要从事精密工程测量、CORS运行管理等工作。E-mail:qzpi_kongn@163.com
收稿日期:2015-01-26
引文格式: 孔宁,林鸿,欧海平,等. 基于自动照准全站仪的精密三角高程测量代替二等水准测量的研究与应用[J].测绘通报,2016(2):107-109.DOI:10.13474/j.cnki.11-2246.2016.0062.