地面三维激光扫描仪的检校与测量精度评定
2016-04-11徐寿志程鹏飞丁朋辉
徐寿志,程鹏飞,张 玉,丁朋辉
(1. 武汉大学测绘学院,湖北 武汉 430079; 2. 国家测绘产品质量检验测试中心,北京 100830;
3. 国家光电测距仪检测中心,北京 100039; 4. 中国测绘科学研究院,北京100830)
地面三维激光扫描仪的检校与测量精度评定
徐寿志1.3,程鹏飞2,张玉4,丁朋辉3
(1. 武汉大学测绘学院,湖北 武汉 430079; 2. 国家测绘产品质量检验测试中心,北京 100830;
3. 国家光电测距仪检测中心,北京 100039; 4. 中国测绘科学研究院,北京100830)
Calibration and Accuracy Evaluation of Terrestrial Laser Scanner
XU Shouzhi,CHENG Pengfei,ZHANG Yu,DING Penghui
摘要:针对地面三维激光扫描仪的测量精度评定问题,提出了利用比长基线检定场进行测距精度评定,利用多齿分度台进行水平角精度评定,利用室内检校场进行垂直角和点位精度评定。采用比长基线检定场方法,每个观测点布设稳固,且有强制对中装置,能够较好地减少其他误差的影响。采用多齿分度台利用全圆组合比较法进行水平角精度评定,该方法所用的角度标准器精度高,可溯源。基于Riegl VZ-1000的试验结果表明,本文所提出的方法对地面三维激光扫描仪进行性能评定可靠性好、稳定性强,对地面三维激光扫描仪的检校研究具有一定的参考和应用价值。
关键词:地面三维激光扫描仪;精度评定;测距;测角;点位
三维激光扫描技术具有实时、动态、高速度、高密度、高精度、数字化、自动化、非接触和可量测等优点,是目前国际上获取三维空间数据最先进的测量技术之一。三维激光扫描系统按不同的搭载平台主要可分为星载激光扫描系统、机载激光扫描系统、车载激光扫描系统和地面激光扫描系统。地面三维激光扫描仪(terrestrial laser scanner, TLS)是地面激光扫描系统的主要组成部分,目前TLS的精度指标都是由仪器生产厂商提供,该精度是否符合要求是未知的。此外,长期使用后的硬件老化和磨损等因素都会不同程度影响扫描精度,因此对TLS的各项性能指标进行精度评定显得十分必要。TLS由于出现时间较晚,结构复杂,如何对不同生产厂商的仪器进行性能评定,目前还没有统一的标准与规范。文献[1]分别利用六段解析法和间接平差法对TLS的测距和测角进行了检校;文献[2]利用平均调制传递函数(AMTF)模型对点云的角度分辨率进行了精度评定;文献[3]利用Böhler-Sterne鉴别率板对TLS的鉴别率进行了评定;文献[4]分析了TLS的测距误差源,并根据反射强度建立TLS测距误差改正模型以减少测距误差;文献[5]利用自制装置对TLS的测距不确定度进行了评定;文献[6]和文献[7]分别利用自检校方法对TLS的系统误差进行了参数估计;文献[8]利用球形靶标对TLS进行不确定度评定。目前对于TLS的测量精度评定大多是从某一方面进行评定[9-11]。鉴于此,本文提出利用比长基线检定场进行测距精度评定,以可溯源的多齿分度台进行水平角精度评定,利用室内检校场进行垂直角精度和点位精度评定。
一、地面三维激光扫描仪测量原理
TLS由三维激光扫描仪、数码相机(可选)、自带软件、电源和其他附件组成。目前市场上主流的TLS测量方式有脉冲式和相位式,其工作原理是由激光脉冲二极管发射出激光脉冲信号,通过旋转棱镜的转动,实现对目标的横向和纵向扫描,然后通过探测器,接收并记录反射回来的激光脉冲,从而获取目标点的三维坐标。其测量原理是:通过传播时间或相位变化来测量距离S,通过仪器内的精密时钟控制编码器获取激光束的水平角φ和垂直角θ。TLS采用仪器自定义的坐标系统:X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直构成右手坐标系,坐标原点为仪器的扫描中心。由此可以得到点位坐标的计算公式
(1)
由式(1)和误差传播定律可以导出点位坐标分量误差及点位坐标误差
(2)
从式(2)可以看出,距离、水平角、垂直角的测量精度直接影响点位精度,扫描的距离、水平角、垂直角的数值大小也对点位坐标误差分量及点位坐标误差有着不同程度的影响。
二、地面三维激光扫描仪的精度评定
TLS的测距精度、测角精度和点位精度决定了其基本测量性能。本文结合TLS本身的特点,提出了相应的方法对TLS性能指标进行精度评定。
1. 测距精度
文献[1]利用六段解析法解算出了TLS的测距加常数,然后再进行精度评定。该方法得到的是利用测距加常数改后的测距精度,不是仪器本身实际的测距精度。本文采用经国家鉴定的测绘仪器比长基线检定场作为长度基准(基线场总长1080 m,相对精度为0.36×10-6),对TLS实际测距精度进行评定。
比长基线检定场如图1所示,其中L4-5=192.082 10 m,L5-6=72.046 99 m。评定方法如下:选择基线场的两条相邻基线边作为基准边,利用扫描仪对已知基线边进行距离测量,最后进行测量结果比对。评定过程:在基线场的5号点安置TLS,并对中整平,然后分别在4号点和6号点安置TLS的专用标靶,同时对中整平,注意靶标的高度尽量与扫描仪的高度一致,避免垂直角误差的影响,控制TLS对标靶进行30次重复扫描,利用配套数据处理软件获取两者之间的斜距,根据标准差公式计算测距重复性,根据均方根误差公式计算测距精度。

图1比长基线检定场示意图
在计算测距精度时,因为
TLS
提供的距离值D
i
是斜距,而标准值D
0
是平距,因此需要将斜距转化为平距,按照公式D
s
=D
i
sin
θ进行计算,θ为垂直角。其部分测距观测结果见表1。
本文测试使用的RieglVZ-1000 192m测距重复性为0.000 9m,测距精度为0.001 7m;72m测距重复性为0.001 1m,测距精度为0.001 2m。

表1 TLS 192 m和72 m部分测距观测值
利用比长基线场进行测距精度评定,该方法基线场每个观测点布设稳固,且有强制对中装置,能够较好地减少其他误差的影响。因此,利用该方法进行测距精度评定精度高、可靠性强。
2. 测角精度
TLS与全站仪在角度观测方式上有着本质的区别,TLS不能通过盘左盘右来消除视准轴误差,而且仪器本身也不具备瞄准和单点扫描的功能,因此需要借助于专用靶标。TLS每个扫描点包含两个角度,即水平扫描角和垂直扫描角,需要分别对它们进行精度评定。
(1) 水平角精度
文献[9]采用Leica T3000电子经纬仪对布设在墙面上的人工标志进行水平角测量,以此提供角度基准,进而进行精度标定。本文采用多齿分度台进行TLS水平角的精度标定,借鉴了全站仪和电子经纬仪一测回水平方向标准差检定方法中的比较法,即利用多齿分度台作为角度标准器,与TLS靶标测量获取的角度观测值进行比较。
多齿分度台(如图2(a)所示)是一种高准确度的圆分度标准器件,一般由齿数和模数相同的两个齿盘组成。使用时,一个齿盘固定,另一个齿盘可与之脱开,旋转到所需角度后啮合,从而达到定位和高分度的目的。笔者采用的是552齿的多齿分度台,其最大误差为0.3″。
评定方法如下:①将多齿分度台精确调平,然后将Riegl VZ-1000连同基座固定安置到平台上并调平(如图2(b)所示);②在距扫描仪约50 m处安置专用靶标;③将多齿分度台置于零位,每次顺时针旋转一定的角度,扫描仪也跟着旋转同样的角度,旋转完成后扫描仪对靶标进行扫描,提取靶标中心和水平角度值。

图2
多齿分度台旋转360°称为一个测回,一般至少需要测量两个测回,回零读数不参与水平角标准偏差计算,其水平角部分观测结果见表2。
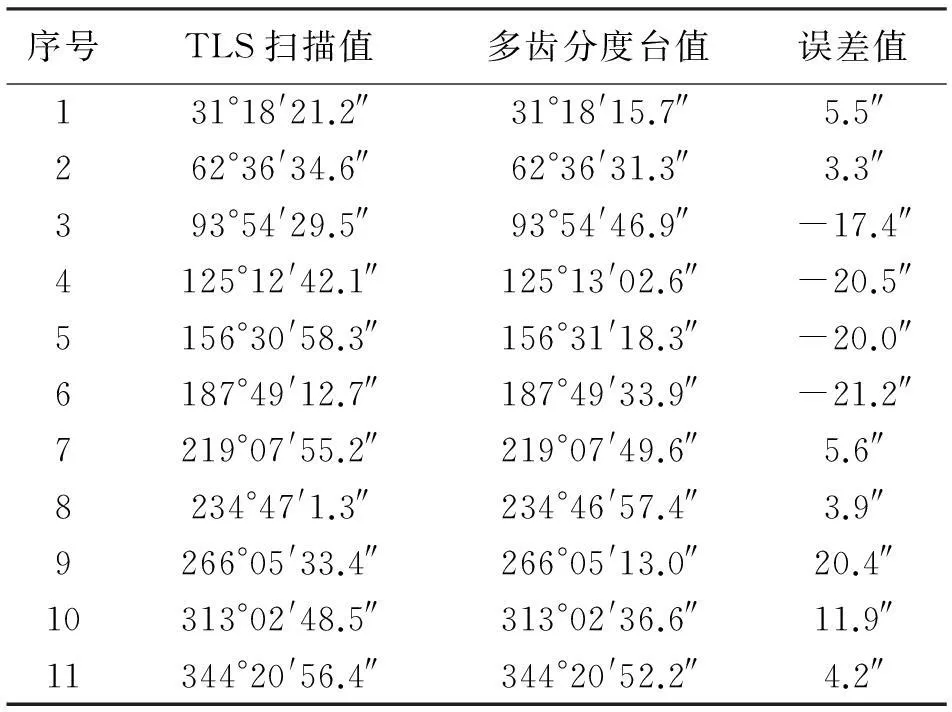
表2 多齿分度台法一测回水平方向观测值
水平方向误差按式(3)计算
(3)
式中,αij为各测点标靶测量方向与零方向的角度值;α标j为第j个角度的多齿分度台标准角度值;i表示第i测回;j表示第j测点。
水平角标准差计算公式为
(4)
本文测试使用的Riegl VZ-1000水平角精度σφ=15.57″。
该方法借助多齿分度台作为角度基准,通过设置二者刚性同轴,通过全圆组合比较法进行了水平角精度评定。该方法所用的角度标准器精度高,可溯源。
(2) 垂直角精度
垂直角的精度评定是利用Sokkia NET05全站仪对布设在室内墙面上的多个分布在一条垂直线上的专用靶标进行垂直角度测量(如图3所示),从而提供垂直角度基准,该方法也叫多目标法。

图3 测定垂直角精度的室内靶标分布图
评定方法如下:①将全站仪安置在升降工作台上,同时量取全站仪仪器高,然后利用全站仪从上往下依次观测靶标的中心,并记录其垂直角度方向值;②卸下全站仪,将扫描仪安置在升降工作台上,调节升降平台使得扫描仪的几何中心高度与全站仪的仪器高一致,然后自上而下依次照准标靶,扫描完成后提取出角度方向值,至少需扫描2个测回;③将垂直角度方向值两两相减得到垂直角,垂直角的标准差计算公式同水平角标准差计算公式,按式(3)、式(4)计算。其垂直角度值见表3。

表3 TLS垂直角度值
本文测试使用的Riegl VZ-1000垂直角精度σθ=14.77″。
垂直角精度与水平角精度相当,表明利用多目标法进行垂直角精度评定是有效、可行的。该方法需要注意的是测量过程必须保持TLS的几何中心高度与全站仪的仪器高一致。
3. 点位精度
TLS的点位精度直接决定点云数据的质量,因此对点位进行精度评定显得尤为重要。本文采用室内检校场方法,即在室内检校场墙面上布置一系列的专用靶标。评定方法如下:①首先将全站仪安置在升降平台上,量取仪器高,然后利用Sokkia NET05全站仪通过后视定向测量出所有的专用靶标坐标,全站仪的测站坐标设定为(100.0,100.0,100.0);②卸下全站仪安置TLS,调节升降平台使得TLS仪器几何中心与全站仪的仪器高一样,测站坐标也设定为(100.0,100.0,100.0),然后瞄准同样的后视点进行后视定向,控制TLS对室内检测场进行高密度单站扫描,利用后处理软件获得标靶中心坐标。点位精度计算公式为
σcoord=
(5)
式中,(Xi,Yi,Zi)为TLS扫描的点位坐标;(Xi0,Yi0,
Zi0)为全站仪测量坐标;n为靶标个数。
室内检校场的每个墙面均匀布设5个专用靶标(如图4所示),TLS按顺时针(或逆时针)对靶标进行扫描,其测量结果见表4。

图4 室内专用靶标分布图(黑色圆点)
本文测试使用的RieglVZ-1000的点位精度σcoord=0.004 3m。点位的精度受距离的影响较大,RieglVZ-1000短距离点位精度可以达到毫米级,室外的测试表明,RieglVZ-1000长距离点位精度可以达到厘米级。

表4 TLS点云观测数据
三、结果和讨论
从Riegl VZ-1000的评定结果可以看出,其测距精度和测距重复性符合厂家给出的精度要求(见表5)。Riegl VZ-1000的实际测量距离达到1000 m以上,厂家给出的标称精度为100 m的测距精度,因此本文选择192 m和72 m两个标准长度进行测距精度评定。另一方面,由于随着距离的增大,点云密度受地面三维激光扫描仪发散角的影响就越明显,点云密度越小,选点相对比较困难。另外,厂家并没有给出测角标称精度,本文得到的测角精度为15″左右。将测距精度和测角精度代入式(2)得到Riegl VZ-1000理论点位精度为0.001 8 m,与实际点位精度0.004 3 m有一定的差异,可能是由于靶标中心拟合误差影响所致。

表5 Riegl VZ-1000 主要技术参数
四、结束语
TLS主要用于三维建模和虚拟现实,以及生成基于点云的可量测影像。作为获取三维空间信息的高新技术,其仪器性能的优劣决定了测量成果的好坏,其测量精度也直接决定它的应用领域和应用范围,因此对其进行测量性能评定至关重要。本文以Riegl VZ-1000为例,从测距精度、测角精度、点位精度对其进行了性能评定。此外,点云的配准精度、点云的建模精度将是下一步的研究工作。本文的主要结论为:
1) 通过高精度的比长基线检定场进行TLS测距精度评定,该方法操作简单、省时、省力、精度高、可溯源。
2) 多齿分度台可以用于TLS的水平角精度评定,该方法无需布设多个目标点,精度高、稳定性好、可溯源。
3) 可以利用室内检校场通过坐标已知的多个靶标进行点位精度评定。
4) Riegl VZ-1000测距精度1~2 mm,符合标称精度;测角精度15″左右;点位精度可以达到毫米级,其受距离的影响较大。
参考文献:
[1]刘春,张藴灵,吴杭彬.地面三维激光扫描仪的检校与精度评估[J].工程勘察,2009(11):56-60.
[2]陈西江,花向红,邱卫宁,等.点云角度分辨率精度评定[J].武汉大学学报(信息科学版),2013,38(9):1044-1047.
[3]王守国.地面激光扫描仪鉴别率检定方法的研究[J].测绘通报,2011(6):45-47.
[4]赵松,西勤,刘松林,等.基于回光强度的地面三维激光扫描仪测距误差模型[J].测绘科学,2013,38(3):169-174.
[5]POLO M, FELICISIMO A M, VILLANUEVA A G, et al. Estimating the Uncertainty of Terrestrial Laser Scanner Measurements[J]. IEEE Transactions on Geoscience and Remote Sensing,2012,50(11):4804-4808.
[6]LICHTI D D. Terrestrial Laser Scanner Self-calibration: Correlation Sources and Their Mitigation[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2010, 65(1): 93-102.
[7]RESHETYUK Y. An Unified Approach to Self-calibration of Terrestrial Laser Scanners[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2010, 65(5): 93-102.
[8]PAREJA T F, PABLOS A G, OLIVA J V Y. Terrestrial Laser Scanner (TLS) Equipment Calibration[J]. Procedia Engineering, 2013(63):278-286.
[9]张启福.地面三维激光扫描仪性能测试方法研究[D].郑州:信息工程大学,2012.
[10]王玉鹏,卢小平,葛晓天,等.地面三维激光扫描点位精度评定[J].测绘通报,2011(4):10-13.
[11]张永彬,高祥伟,谢宏全,等.地面三维激光扫描仪距离测量精度试验研究[J].测绘通报,2014(12):16-19.
中图分类号:P237
文献标识码:B
文章编号:0494-0911(2016)02-0079-05
作者简介:徐寿志(1986—)男,博士生,主要从事车载移动测量系统的检校及理论研究。E-mail:xsz2011@whu.edu.cn
基金项目:测绘地理信息公益性行业专项(201512010)
收稿日期:2015-11-06
引文格式: 徐寿志,程鹏飞,张玉,等. 地面三维激光扫描仪的检校与测量精度评定[J].测绘通报,2016(2):79-83.DOI:10.13474/j.cnki.11-2246.2016.0054.