基于生物力学的踏板人机工程设计研究*
2016-04-11何智成成艾国
杨 枫,何智成,成艾国,谭 纯
(湖南大学,汽车车身先进设计与制造国家重点实验室,长沙 410082)
2016074
基于生物力学的踏板人机工程设计研究*
杨 枫,何智成,成艾国,谭 纯
(湖南大学,汽车车身先进设计与制造国家重点实验室,长沙 410082)
基于生物力学分析,研究了踏板设计参数对踏板操作时下肢肌肉疲劳的影响。定义了4个设计因子:座椅高度、踏板行程、踏板行程倾角和踏板高度,进行中心复合试验设计。应用生物力学软件AnyBody对25组试验进行了仿真分析,通过对仿真结果的回归分析得出各设计因子的影响权重,并分析了每个因子对不同百分位人体最大肌肉活动度的影响,给出设计因子的推荐取值范围。该方法建立了踏板的工程设计与驾驶员踏板操作舒适性的联系,为汽车踏板的人机工程参数化设计提供依据。
踏板设计;生物力学;人机工程;肌肉骨骼模型
前言
踏板设计是汽车驾驶室设计的重要内容,与手操纵件相比,脚操纵件往往会限制驾驶员的坐姿,而且不合理的踏板设计会造成肌肉疲劳,并引起驾驶员的不舒适感[1]。
当前,汽车操纵装置的开发几乎完全基于设计经验、现场试验和广泛、耗时、昂贵的原型设计,据此,针对汽车驾驶室开发的人机主观试验平台(Seating Buck)被广泛设计出来[2-3]。这种人机主观试验平台对于验证驾驶室的布置是有效的,但对于考察驾驶员实车驾驶过程中的操作舒适性仍有缺陷[4-6]。
很多文献提出利用CAE技术建立人机交互的生物力学模型,试图解决上述问题。文献[7]中采用可变肌肉力方向的方法,对下肢肌肉骨骼模型的肌肉力进行计算,将计算结果和肌电信号对比,验证该方法对肌肉力计算的准确性。文献[8]中应用数字人体模型分别对不同的车辆研究参数组合进行了仿真计算,研究车辆设计参数对踏板操作过程中肌肉力的影响。文献[9]中研究了座椅高度和座椅包裹性对驾驶员操纵加速踏板和制动踏板的影响。文献[10]中在AnyBody平台上建立了通用性的座椅和驾驶员的肌骨模型,考察了座椅靠背角、坐垫倾角、腰靠和面料摩擦因数等因素对长时间驾驶疲劳的影响。这些研究对于应用生物力学模型研究驾驶员与踏板的力学作用有很好的指导意义,但未综合考虑不同百分位人体和踏板的工程设计对踏板操作舒适性的影响。本文中在AnyBody平台上建立符合人机工程设计的下肢踏板操作的人机交互模型,并采用肌肉募集算法和最小肌肉疲劳理论,通过生物力学分析,得出踏板的人机工程设计参数对不同百分位人体最大肌肉活动度的影响,充分考虑了不同百分位人体的几何尺寸与生物力学机能的差异,建立起驾驶员踏板操作舒适性与工程设计的联系。
1 方法概述
踏板人机工程的传统设计方法为:根据SAE J826定位H点装置(实物工具HPM或CAD工具HPD),使其踝关节的角度为87°,在Y平面上,根据BOF点和加速踏板脚平面参考面,确定加速踏板参考点的位置和加速踏板面[11]。在P平面上根据推荐值并考虑周边间隙和操作方便性,确定加速踏板和制动踏板的间隙。该方法具有很好的工程实用性,但依赖于标准以及工程师的经验,无法从踏板的设计因素来考虑,设计的踏板往往需要经过人机主观试验平台的验证。
本文中结合生物力学与汽车人机工程,提出了踏板人机工程的参数化设计方法,通过不同百分位人体的肌肉疲劳情况得出踏板设计参数的合理范围。该方法的流程如图1所示,具体步骤为:
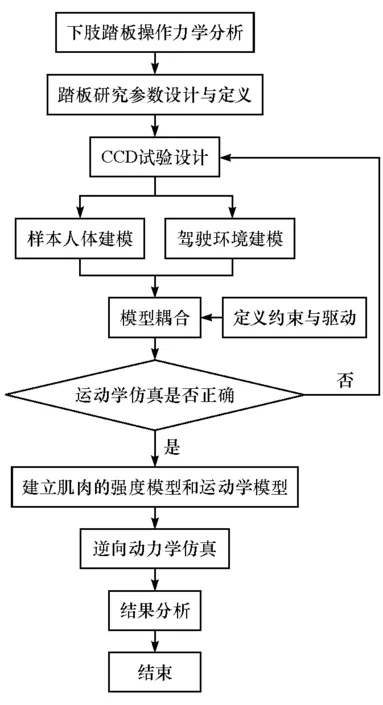
图1 方法流程图
(1) 进行下肢踏板操作的力学分析,根据关节力矩的表达式确定影响生物力学的踏板参数。
(2) 结合踏板人机工程的传统设计方法,定义了仿真的控制因子、设计因子和响应。针对设计因子进行中心复合试验设计,构造25种试验条件组合。
(3) 在AnyBody平台上构建人体模型以及驾驶环境模型,使二者耦合,定义模型的关节驱动和约束,进行运动学仿真分析。
(4) 建立肌肉模型,进行逆向动力学仿真,得到肌肉力、关节力矩和最大肌肉活动度等生理学参数,进行结果分析并得出结论。
2 下肢踏板操作的力学分析
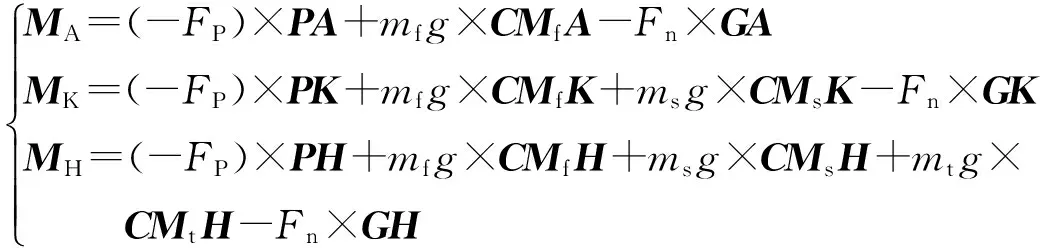
踏板操作时,作用在肢体的力有重力、外载荷、关节作用力和肌肉力。其中,重力、外载荷为已知,关节作用力和肌肉力均为未知量。由于附着在人体各关节的肌肉数量往往多于平衡方程数目,根据牛顿第一定律无法求得,为解决肌肉数量过多的问题,采用空间力系简化方法,将所有肌肉力向关节节点处简化,如图2所示,通过受力分析,可得出踝关节、膝关节和髋关节的关节力矩MA,MK,MH的表达式。
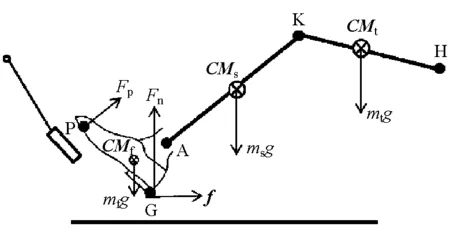
图2 下肢的受力分析
(1)
式中:A,K,H分别为各关节的节点;P为踏板踩踏参考点;G为脚踵点;FP为踏板反力;Fn为地板对脚踵点的支撑力;f为地板对脚踵点的摩擦力(较小可忽略不计);mf,ms,mt分别为脚、小腿、大腿的质量;CMf,CMs,CMt分别为脚、小腿、大腿的质心。假设踏板力FP为一定值,由式(1)分析可知,MA,MK,MH与下肢的肢体长度、关节角度、踏板反力、踏板的高度和踏板倾角等有关。
3 踏板研究参数的设计与定义
将踏板力作为控制因子,利用踏板力与行程检测装置得到踏板力随行程变化的数据点,采用最小二乘法对数据进行拟合,得到踏板力-行程曲线。图3为某制动踏板的踏板力-行程曲线,在仿真试验中通过该曲线定义踏板力。

图3 踏板力-行程曲线
根据下肢踏板操作的力学分析,确定了4个踏板设计因子,如图4所示,分别为座椅高度H30、踏板行程L、踏板行程倾角α和踏板高度HP。
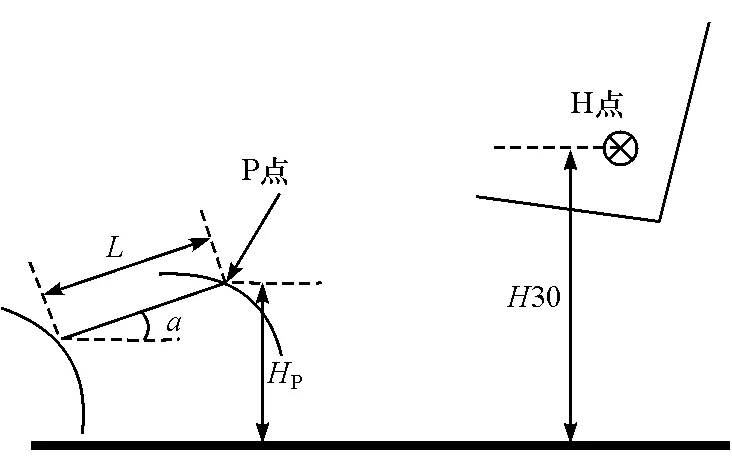
图4 踏板的设计因子
座椅高度是指SAE假人H点到地板的Z向距离,踏板行程为踏板上踩踏参考点(P点)在踏板两极限位置之间的距离,行程倾角为踏板行程与水平面的夹角,踏板高度是踏板在初始位置时P点到地板的Z向距离[12]。为确保4个踏板设计因子的选取具有实际参考价值,对多款A类乘用车进行了调查,并结合试验特点,以制动踏板为测量对象,得到4种设计因子的变化范围:H30(200~400m),L(100~160mm),α(10°~30°)和HP(100~170mm)。
考虑到不同人体的坐姿状态下踏板操作的可及性和关节角度的生理约束,还须定义踏板设计的控制因子。图5为以顶视图表示的控制因子,包括:H点到加速踏板中心线的X向距离L99、H点到加速踏板中心线的Y向距离PW98和加速踏板中心到制动踏板中心的Y向距离PW82。

图5 踏板设计的控制因子
因此,踏板研究参数包括4个设计因子(H30、L、α和HP)、4个控制因子(L99、PW98、PW82和踏板力)和1个响应—最大肌肉活动度。应用中心复合试验设计对4个设计因子设计25组试验,分别对3种百分位人体进行仿真分析。
踏板人机工程传统的设计方法中L99的值根据SAE J1517上有关H点示意线公式来确定[13],3种百分位人体的H点示意线公式为
(2)
式中:XH5,XH50,XH95分别为5%女性人体、50%男性人体和95%男性人体所对应的L99值;ZH为H30的值。
在人机工程软件RAMSIS中定义出25组试验条件中的设计因子,同时参考由SAE J1517得出的L99、PW98和PW82的推荐值,分别以5%女性、50%男性和95%男性3种人体进行驾驶员踏板操作的运动分析,根据推荐的舒适性关节角度,确定L99、PW98和PW82。
4 生物力学建模
在车辆驾驶舒适性研究中,采用志愿者在Seating Buck或实车上进行主观舒适感评价仍存在缺陷,主观评价受个人主观因素和周围环境因素的影响较大,不同评价者的评价结果可能差别很大[14]。要获得具有说服力的规律,需进行广泛试验。因此,采用生物力学模型进行客观、定量地评价驾驶员的舒适感。
4.1 样本人体的定义
根据SAE J833上各百分位人体尺寸的定义[15],在AnyBody平台上构建SAE 5%成年女性、SAE 50%成年男性和SAE 95%成年男性3种规格的人体,3种百分位样本人体测量学参数如表1所示。

表1 3种百分位样本人体测量学参数 mm
为保证驾驶员踩踏板力学接触和约束的准确性,需要考虑鞋子的尺寸,如图6所示,然后在相应的人体模型添加鞋子模型,图中BOF点为脚掌的踩踏点。
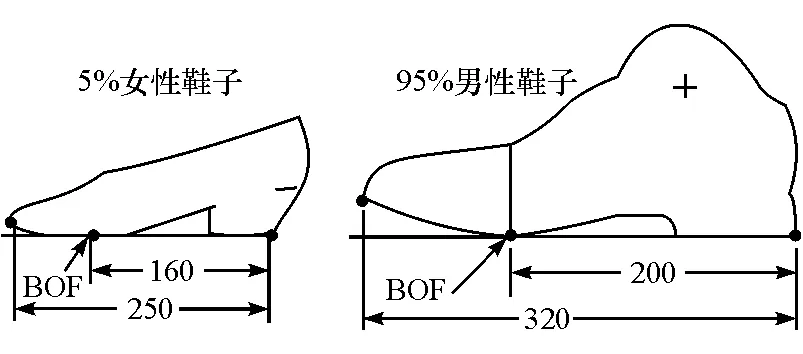
图6 鞋子尺寸定义
4.2 人-环境模型的耦合
驾驶员在驾驶过程中,手握转向盘,右脚置于踏板上,眼睛注视前方,这种人机关系约束了驾驶员的驾驶姿势,所以可采用简化的人体模型来研究驾驶员的踏板操作。在车身总布置时,H点是人体坐姿定位的基准点,因此将H点作为模型的参考点,得到的驾驶坐姿更具有工程实用性。如图7所示,为简化建模,将骨盘固定,并将H点固定在坐标原点用来定位,然后根据髋距、大腿长、小腿长、踝高和踵高等建立简化人体模型,下肢体节的质量和转动惯量的计算参考文献[16]中的回归方程。

图7 下肢踩踏板模型
根据踏板研究参数建立踏板和地板等环境模型。最后,参考SAE J826关于H点设计工具定义总布置关键参考点的方法,定义脚踵点(AHP)、脚掌踏点(BOF),调节下肢关节角度,使AHP点与地板面,BOF点与P点耦合。
4.3 约束与驱动的定义
根据下肢的运动特征定义关节运动,下肢的多刚体动力学表示如图8所示。该下肢动力学模型有3个刚体构件(大腿、小腿、脚),6个自由度(髋关节3个、膝关节1个、踝关节2个)。脚掌踏点和地板面通过球绞q7约束,脚踵点约束在地板面上,并在地板上滑动。在踝关节q5上添加一个驱动,使踝关节在踏板操作过程中发生背屈和跖屈,保证动作不失真。因此,定义了模型的约束和驱动后,整个模型就只剩下1个自由度,可在动力学计算仿真中求解。

图8 下肢踏板操作的多刚体动力学表示
下肢基于多刚体动力学建模完成,可以进行运动学仿真,分析模型的运动是否合理,下肢关节运动描述如表2所示。
根据踏板力-行程曲线,得出踏板力随时间的变化曲线,在脚掌踩踏点施加离散的随时间变化的踏板力。设置脚踵点与地板的摩擦因数为0.8,施加于踝关节q5转动驱动速度为30°/s。在运动学仿真中,施加在踏板铰链处一个驱动速度为20°/s转动驱动。此过程中踏板与地板对人体不产生反力作用,只记录关节运动过程。在逆向动力学仿真中,踏板的驱动关闭,肌肉根据关节记录的运动情况产生肌肉力模拟人踩踏板的过程,同时踏板和地板对脚产生反作用力。

表2 下肢关节运动
4.4 下肢肌肉建模
AnyBody中的肌肉模型由运动学模型和强度模型两部分组成。运动学模型根据身体姿态确定肌肉从起始点到终止点的路径,同时需要定义肌肉的长度和收缩速度。强度模型根据肌肉的运动状态确定肌肉的强度和可能存在的被动弹性力。本文中的下肢腿部肌肉模型采用的运动学模型为AnyViaPointMuscle,该模型的肌肉会穿过从起点到止点的路径上所经过的体节任意数量的节点。强度模型为AnyMuscleModel2ELin,肌肉力的表达式为
(3)

由于在逆向动力学仿真中,肌肉系统拥有的肌肉数目多于平衡外部力必要的肌肉数目,平衡方程的未知量数目多于方程数,系统将有无穷多个解。为解决肌肉的冗余问题,国外很多学者对肌肉的募集问题做了研究[18-20]。
在肌肉参与的活动中,如果能使所参与每块肌肉根据自身承受负荷的能力分配载荷并协同工作时,在理论上肌肉最不容易产生疲劳,因此基于肌肉最小疲劳理论提出最小/最大肌肉募集准则,并用数学模型来表示,即
(4)
Subject toCf=d
(5)
(6)

本文中建模的创新点为:(1)采用SAE物理人体尺寸的标准建立相应百分位人体,并根据SAE相关的标准定义关键参考点,模型具有很好的工程实用性,所得到的结果也具有较好的参考价值。(2)针对踏板操作的特点简化了人体,所建的肌肉骨骼模型不包含上肢,排除了上肢参与时对结果的影响。(3)在踏板操作过程中,考虑了地板对脚踵点的支撑力和摩擦力,使约束更符合实际情况。
建模完成后,进行逆向动力学仿真,得到最大肌肉活动度等生理学指标。
5 结果分析
肌肉疲劳指标是最大肌肉活动程度(Max Muscle Activity),用MMA表示。MMA越大,表示肌肉所承受的负荷越大,在一段时间内,肌肉在相同的外界条件下更趋向疲劳。
采用Isight软件对CCD试验设计得到的结果进行回归分析,得到各个因子的Pareto图,如图9所示。踏板行程对3种人体MMA值的影响最大,H点高度对矮小人体也有较大影响。此外,踏板行程倾角对3种人体的影响均较小。图10为各设计因子对不同百分位人体MMA的影响。
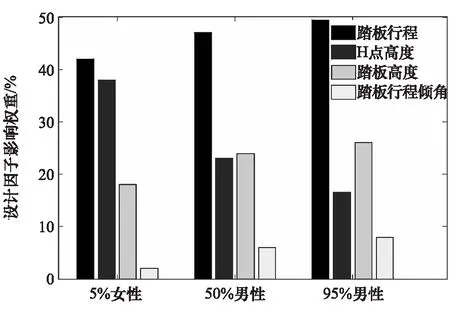
图9 Pareto图
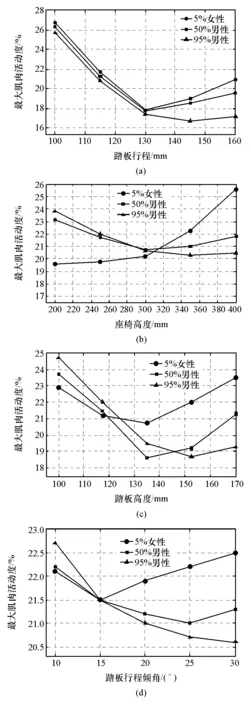
图10 设计因子对不同百分位人体MMA的影响
从图10(a)看出,踏板行程对各百分位人体MMA有很大影响。3种百分位人体基本呈现一致性规律。在踏板行程为100mm时,踝关节的角度变化较小,肌纤维的收缩速度较小,导致较大的肌肉力。踏板行程由100mm增加到130mm时,MMA值明显减小,5%女性人体和50%男性人体MMA值达到最低点,之后随着行程增加而增大,而95%男性人体基本保持不变,因为较大的踏板行程导致肌纤维收缩的初长度变长,肌肉载荷也变大,而且矮小人体对此变化较为敏感。所以,踏板行程为125~145mm时,3种百分位人体的MMA值都较小。
从图10(b)看出,5%女性人体MMA值随着H30增加而增大,因为过高的H点导致5%女性人体的髋关节屈伸角减小,膝关节和踝关节的屈伸角度增大,以满足踏板的可及性要求。根据研究可知,当膝关节屈曲角超过90°时,只有比目鱼肌对踝关节起作用。此时比目鱼肌需要施加更大的肌肉力来驱动踏板,同时腓肠肌的肌肉力增加以保持稳定。而50%男性和95%男性人体由于肢体较长,在H点较高时的坐姿更倾向于合适的关节角度,因此MMA随着H点高度的增加而减小,之后基本不变。所以,优先考虑5%女性并综合考虑其他百分位人群,H30为250~320mm较为合适。
从图10(c)看出,3种百分位人体MMA值在踏板高度增加时表现出一致性的规律,均是先减小后增大。但是3种人体MMA值分别在130~140mm和150~160mm之间达到最小值,这表明高大的人体在较高踏板时的舒适性较好,反之矮小人体倾向于较低的踏板。但踏板如果过低(比如110mm以下),踝关节的屈曲角较小甚至为负值,导致比目鱼肌的肌肉力较小,而股外侧肌肉力增大以弥补减小的肌肉力,这样肌肉活动程度加大。踏板过高,踝关节的屈曲角较大,肌肉收缩元的初长度较大,MMA值变大。综合分析,踏板高度为125~140mm较为合适。
从图10(d)看出,踏板行程倾角对3种百分位人体的MMA值影响不大。95%男性人体MMA值随踏板行程倾角的增大而减小,5%女性人体以及50%男性人体的MMA值先减小后增大,且分别在踏板行程倾角为15°和25°左右达到最小。身材高大的人体在较大的踏板行程倾角时的舒适性较好,身材矮小的人体更倾向于较小的踏板行程倾角。优先考虑5百分位女性并综合其他百分位人群,推荐踏板行程倾角为15°~20°。
6 结论
(1) 提出一种踏板人机工程设计的新方法,通过生物力学分析,确定了研究参数并进行中心复合试验设计,得出研究参数的推荐范围,可在车辆总布置前期提高设计的合理性,为踏板人机工程参数化设计提供依据。
(2) 结合汽车人机工程学与人体测量学,在AnyBody软件中分析驾驶员踏板操作的最大肌肉活动度,建立踏板的工程设计与驾驶员踏板操作舒适性的联系。
由于人体最大肌肉活动度与驾驶操作不舒适性的关系尚未完全知晓,并且二者随姿势变化的规律也可能不完全一致,但从减少由于不合理的姿势导致的人体最大肌肉活动度的角度考虑,该方法对于操纵装置的布置与优化具有一定的参考价值。
[1] SANDERS M S, MCCORMICK J E. Human Factors in Engineering and Design[M]. New York: McGraw-Hill,1993.
[2] 张鄂,洪军,吴文武,等.汽车乘驾体位生物力学试验台的设计分析[J].西安交通大学学报,2006,40(5).
[3] WANG X, BLANDINE L B, LIONEL B. Biomechanical Evaluation of the Comfort of Automobile Clutch Pedal Operation[J]. International Journal of Industrial Ergonomics,2004(34):209-221.
[4] ZHANG L, HELANDER M, DRURY C. Identifying Factors of Comfort and Discomfort[J]. Human Factors,1996,38(3):377-389.
[5] KOLICH M, TABOUN S M. Ergonomics Modelling and Evaluation of Automobile Seat Comfort[J]. Ergonomics,2004,47(8):841-863.
[6] HANSON L, SPERLING L, AKSELSSON R. Preferred Car Driving Posture Using 3-D Information[J]. International Journal of Vehicle Design,2006,42(1/2):154-169.
[7] YAMADA D, HADA M. An Estimation Method of Muscle Force by Using Variable Moment Arm Vector[C]. SAE Paper 2007-01-2468.
[8] FRAYSSE F, WANG X, CHZE L. Estimation of the Muscle Efforts of the Lower Limb During a Clutch Pedal Operation[C]. SAE Paper 2007-01-2487.
[9] HORIUE M, TOMONORI O, OKIYAMA H. A Study on Design Factors of Gas Pedal Operation[C]. SAE Paper 2012-01-0073.
[10] GRUJICIC M, PANDURANGAN B, XIE X, et al. Musculoskeletal Computational Analysis of the Influence of Car-seat Design/adjustments on Long-distance Driving Fatigue[J]. International Journal of Industrial Ergonomics,2010(40):345-355.
[11] Society of Automotive Engineers. SAE J826 REV. JUN2002 H-Point Machine and Design Tool Procedures and Specifications[S]. USA: SAE International,1998.
[12] Society of Automotive Engineers. SAE J1100 NOV2009 Motor Vehicle Dimensions[S]. USA: SAE International,2009.
[13] Society of Automotive Engineers. SAE J1517 REAF.DEC1998 Driver Selected Seat Position[S]. USA: SAE International,1998.
[14] GYOUHYNG K, MAURY A N, KARI B. Driving Sitting Comfort and Discomfort(part I): Use of Subjecting Rating in Discriminating Car Seating and Correspondence Among Ratings[J]. International Journal of Industrial Ergonomics,2008(38):516-525.
[15] Society of Automotive Engineers. SAE J883 Human Physical Dimensions[S]. USA: SAE International,2003.
[16] DUMAS R, ChZE L, VERRIEST J P. Adjustments to Body Segments Inertial Parameters[J]. Journal of Biomechanics,2007,40(7):1651-1652.
[17] THORPE S K, LI Y, CROMPTON R H, et al. Stresses in Human Leg Muscles in Running and Jumping Determined by Force Plate Analysis and from Published Magnetic Resonance Images[J]. Journal of Experimental Biology,1997(201):63-70.
[18] VAN BOLHUIS B M, GIELEN C C. A Comparison of Models Explaining Muscle Activation Patterns for Isometric Contractions[J]. Biological Cybernetics,1999(81):249-261.
[19] DAMSGAARD M, RASMUSSEN J, CHRISTENSEN S T. Inverse Dynamics of Musculo-skeletal Systems Using an Efficient Min/max Musclerecruitment Model[D]. Pittsburgh: Proceedings of IDETC: 18-th Biennial Conference on Mechanical Vibration and Noise,2001.
[20] RASMUSSEN J, DAMSGAARD M, VOIGT M. Muscle Recruitment by the Min/max Criterion-a Comparative Study[J]. Journal of Biomechanics,2001,34(3):409-415.
[21] DAMSGAARD M, RASMUSSEN J, CHRISTENSEN S T, et al. Analysis of Musculoskeletal Systems in the AnyBody Modeling System[J]. Simulation Modelling Practice and Theory,2006(14):1100-1109.
A Research on Pedal Ergonomic Design Based on Biomechanics
Yang Feng, He Zhicheng, Cheng Aiguo & Tan Chun
HunanUniversity,StateKeyLaboratoryofAdvancedDesignandManufacturingforVehicleBody,Changsha410082
Based on biomechanical analysis, the influences of pedal design parameters on the leg muscle fatigue of driver in operating pedal are studied. Four design factors, i.e. seat height, pedal travel, pedal travel angle and pedal height are defined and a central composite experimental design is conducted. Then 25 groups of experiments are simulated with biomechanical software AnyBody, the weighing coefficients for each design factor are obtained by regression analysis on simulation results, and the effects of each factor on the maximum muscle activity for human bodies of different percentiles are analyzed with the recommended range of design factor given. This method establishes the correlations between pedal engineering design and driver’s comfort in pedal operation, providing a basis for the ergonomic parametric design of vehicle pedal.
pedal design; biomechanics; ergonomics; musculoskeletal model
*国家自然科学基金(11202074)和湖南大学汽车车身先进设计与制造国家重点实验室重点项目(61165001)资助。
原稿收到日期为2014年12月19日,修改稿收到日期为2015年2月10日。
