基于危险感知机理的状态适应式碰撞预警策略研究*
2016-04-11李家文曹建东
李家文,曹建东,成 波
(1.浙江工业大学机械工程学院,杭州 310014; 2.交通运输部科学研究院,北京 100029;3.清华大学汽车工程系,汽车安全与节能国家重点实验室,北京 100084)
2016069
基于危险感知机理的状态适应式碰撞预警策略研究*
李家文1,曹建东2,成 波3
(1.浙江工业大学机械工程学院,杭州 310014; 2.交通运输部科学研究院,北京 100029;3.清华大学汽车工程系,汽车安全与节能国家重点实验室,北京 100084)
从危险感知机理的角度出发,对适应驾驶员疲劳状态的碰撞预警系统进行研究,分析在预警时机和预警方式上所应遵循的设计原则。基于信号检测理论的研究结果表明,驾驶员在判别危险时,随着疲劳程度的加深,驾驶员在态度上变得越来越保守,而进入非常疲劳状态后,其危险判别的能力也明显下降。因此碰撞预警在设计策略上应根据危险感知与疲劳程度的量化关系将预警时机进行适当提前,而在预警方式上则应尽量采用组合式的预警信号,着重提高可理解性。
驾驶员疲劳状态;碰撞预警;信号检测理论;感知机理;预警策略
前言
设计符合驾驶员危险感知特性的预警时机与预警方式是目前碰撞预警系统常用的方法[1-2]。但当驾驶员处于疲劳状态时,其反应和信息处理等方面能力都将产生明显的变化[3],车辆碰撞预警系统的设计必须考虑驾驶员这种感知特性的变化,使预警时机与预警方式能够符合不同状态的驾驶员对危险状态的感知结果,以保证预警系统的实际效果[4]。因此对驾驶员在不同状态下对碰撞危险感知机理的把握对于预警系统的设计具有非常重要的作用,值得深入研究。
本文中利用驾驶模拟仪,模拟不同的驾驶危险环境,针对驾驶员在不同状态下的危险判断表现,引入信号检测理论用于研究疲劳状态对于其判断结果的影响机理,并据此分析碰撞预警系统在预警时机以及预警方式上的设计策略,为碰撞预警系统的设计提供新的方法与理论支持。
1 研究方法
1.1 信号检测论在驾驶员危险感知研究中的应用
信号检测理论最初用于通信领域,在被引入到心理学研究之后用于研究外界刺激与内部感知表征之间的关系[5-6],其主要指标是反应偏向与敏感性,其中反应偏向解释了个体区分外界刺激(包含信号和噪声)的态度,而敏感性则可以说明个体区分刺激的能力。对于实际的驾驶过程来说,前方车辆(或障碍物)就是外界的刺激,可以用诸如THW(time headway)、TTC(time to collision)等代表碰撞危险的参数来表示。在不同的状态下驾驶员皆须对前方的交通状况做出“安全”与“危险”的判断,反映在实际操作中就是诸如制动、换道等避免危险的行为,通过统计大量驾驶员的这些判别操作行为,获得一个面向驾驶员不同状态,反映其判别前方环境条件是否安全的概率分布和一个平均意义上的判别阈值。由此即可对驾驶员在不同状态下对环境是否危险的反应偏向与区分危险与安全的敏感性进行研究。通过比较清醒与疲劳状态下驾驶员反应偏向和敏感性的变化情况来分析驾驶员的疲劳状态对其危险感知特性的影响,从而为车辆碰撞预警系统的设计策略提供理论依据。
1.2 实验设计
基于清华大学的大型驾驶模拟器开展了相关研究,如图1所示。实验中,被试驾驶员分别以60和90km/h的速度驾驶一辆汽车(简称自车)在一条全长50km的双向6车道高速公路上行驶,前方有以40km/h速度行驶的车辆(简称前车)。为更好地比较和分析不同状态的驾驶员在纵向驾驶过程中对安全和危险的判断情况,实验设计了两种危险级别,一种是被试驾驶员感觉如果继续行驶,前车对自车产生威胁;另一种是被试驾驶员如果继续行驶,则两车可能发生碰撞。为获得这两种结果,做了如下实验设计:第一种情况要求被试驾驶员不能降低车速,在感觉到前车对自身保持车速产生影响时,超越前车;第二种情况要求被试驾驶员不能偏离车道,在感觉到碰撞危险时以主动制动的方式来避免碰撞。通过对驾驶员超车和制动时机的分布情况来把握驾驶员在不同状态下对这两种危险的判断变化情况。

图1 驾驶模拟实验平台
在本实验中,须确保被试驾驶员是在清醒状态下完成实验。设定开始以60km/h的速度行驶,并逐渐接近前车。超车或制动之后,模拟仪通过对场景的控制,在一段时间后重复相应工况,每种工况重复3遍。在该过程结束后,被试驾驶员的车速被调整到90km/h,然后在该车速下重复上述两种工况。
在完成以上实验过程后继续驾驶,调整被试驾驶员的车速到40km/h,与前车维持200m的距离不变,以利用单调驾驶环境促使驾驶员进入不同程度的疲劳状态。采用对驾驶员面部表情评分的方法来实时获取驾驶员的实际疲劳状态。实验过程中,利用安装于驾驶员前方的摄像头实时采集驾驶员面部视频图像,由两名经过训练的研究人员按照表1所示的评分标准独立给出各自的评分,评价时将驾驶员的状态分为“清醒”、“疲劳”、“非常疲劳”3级,取两人评分的平均值作为最终结果。
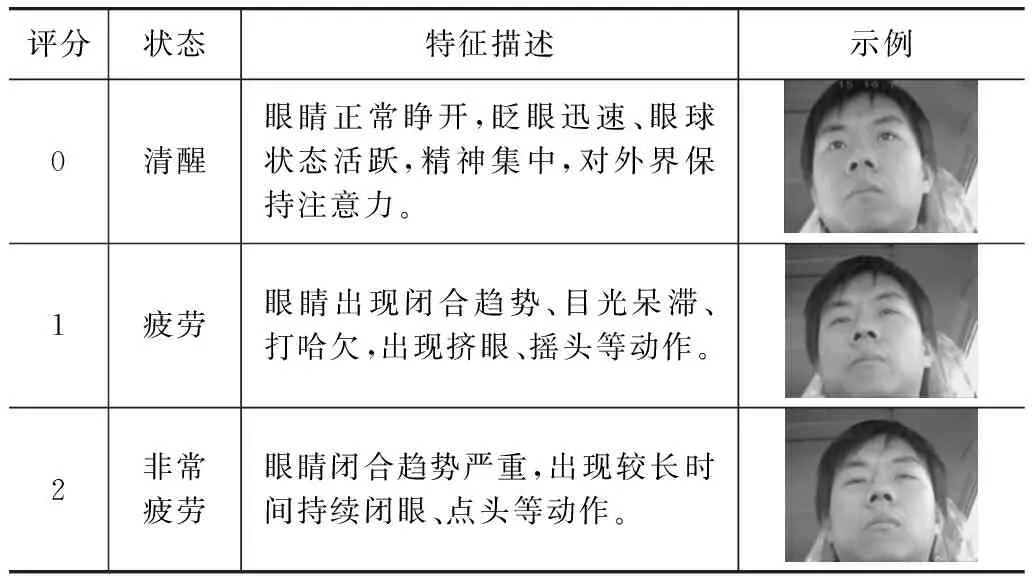
表1 疲劳状态评价指标
当两名有经验的实验研究人员判断被试驾驶员进入疲劳或者非常疲劳的状态之后,重复上述所有测试。
本实验共测试了20名被试驾驶员(男性17名,女性3名,平均年龄26.3岁,标准差3.6岁,平均驾龄2年)。
2 实验与结果分析
2.1 实验设定
实验得到了被试驾驶员在不同状态下超车和制动时的具体时刻。由于超车工况自车车速不变,因此用THW来表示驾驶员的超车行为差异。而制动工况涉及相对速度的变化,因此用TTC来表示驾驶员的制动行为差异。
首先将上述两种实验工况下所得到的实验结果进行预处理,以确定不同状态的驾驶员对不同危险的判断阈值,以及不同的THW和TTC对应的安全和危险的概率。在阈值的设定上,采取将所有被试驾驶员在同一状态下超车时的THW或制动时的TTC的平均值作为驾驶员对于相应工况是否危险的判断标准。在安全和危险的分布统计中,首先将THW和TTC分成若干个区间,其中THW分成[0,1)、[1,2)、[2,3)、[3,4)、[4,5)、[5,6)、[6,7)和[7,8]8个区间;TTC分成[0,1)、[1,2)、[2,3)、[3,4)、[4,5)、[5,6)、[6,7)、[7,8)和[8,9] 9个区间。将被试驾驶员超车时的THW、制动时的TTC定义为危险状态,将其归入某一个区间,同时做如下假设:对于某被试驾驶员来说,在其危险状态所在THW和TTC区间之后的各个区间代表是相对安全的。例如驾驶员在THW=3.2时进行了超车行为,该区间属于[3,4)区间,则对于该被试驾驶员来说,THW=[4,5)这个区间是安全的。基于该假设,本研究计算了所有被试驾驶员在不同状态下,对于环境安全与危险的概率分布结果。
2.2 实验结果
2.2.1 超车工况
图2为在超车工况下不同状态的被试驾驶员在90km/h车速下对环境危险的判断结果。由图2看出,随着被试驾驶员疲劳程度的逐渐加深,安全和危险概率曲线占据的THW区间越来越多,两条曲线的离散程度也越来越低。根据信号检测理论计算图2中各种情况的敏感性和反应偏向,结果如图3所示。可以看出,随着驾驶员疲劳程度的加深,驾驶员对安全和危险工况判断的敏感性下降,同时驾驶员的反应偏向则越来越大。当驾驶员以60km/h的车速行驶时,得到的结果也基本类似。
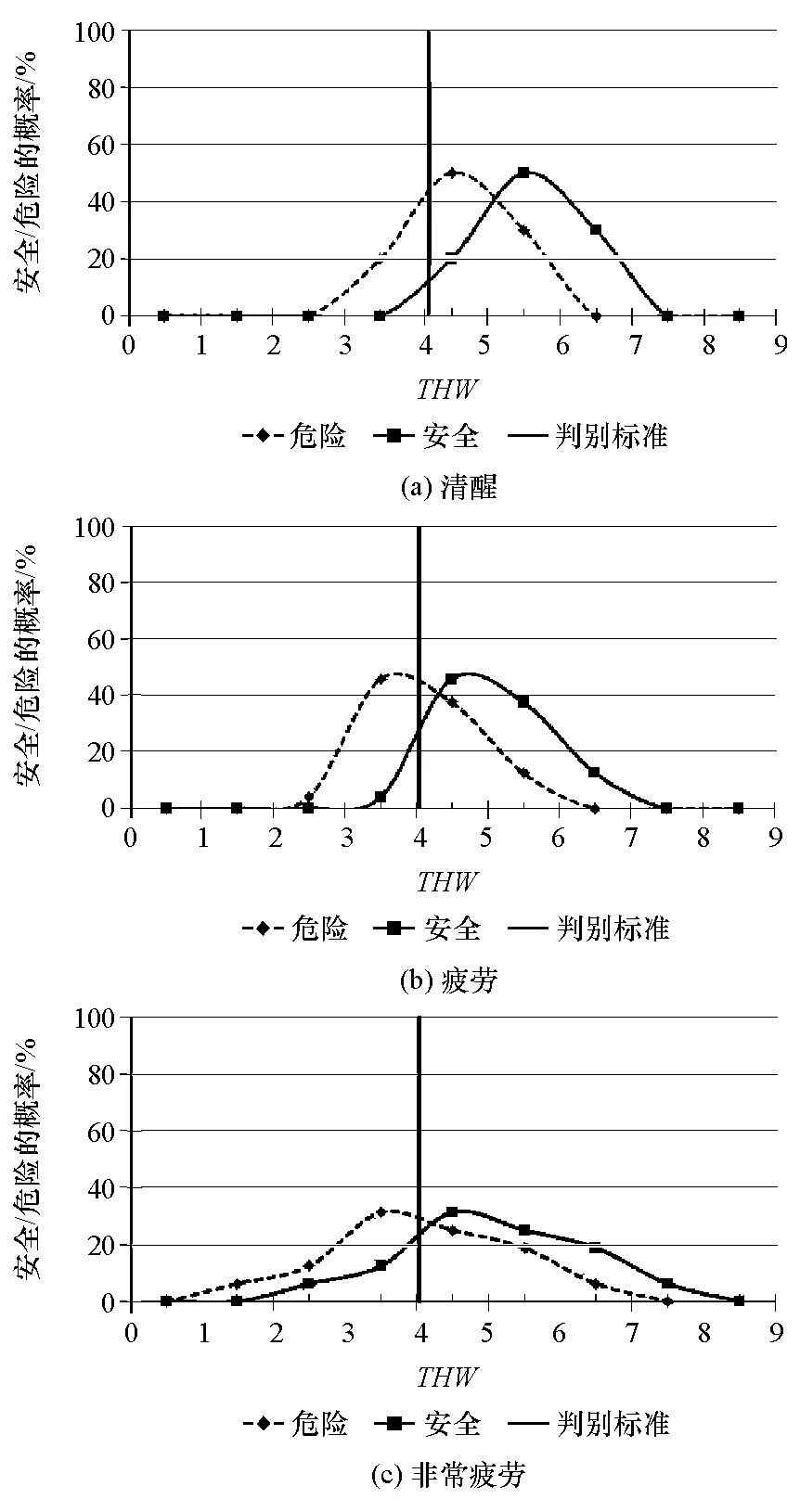
图2 超车工况中不同状态驾驶员的危险判断情况
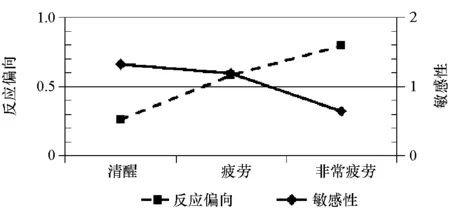
图3 超车工况中不同状态的敏感性和反应偏向(90km/h)
2.2.2 制动工况
图4为制动工况下不同状态的被试驾驶员在60km/h车速下对危险和安全的判断结果。由图4可以看出,随着驾驶状态的变化,被试驾驶员在制动工况时对危险的判断变化趋势和超车工况基本一致,这点也体现在制动工况时不同状态下的敏感性和反应偏向的结果上,如图5所示。说明虽然驾驶员所面临的危险级别不同,但是随着疲劳程度的加深,其对前向碰撞危险判别的敏感性皆呈下降趋势,而其反应偏向则趋于上升。分析被试驾驶员以90km/h的车速进行的制动工况的数据,也得到类似的结果。
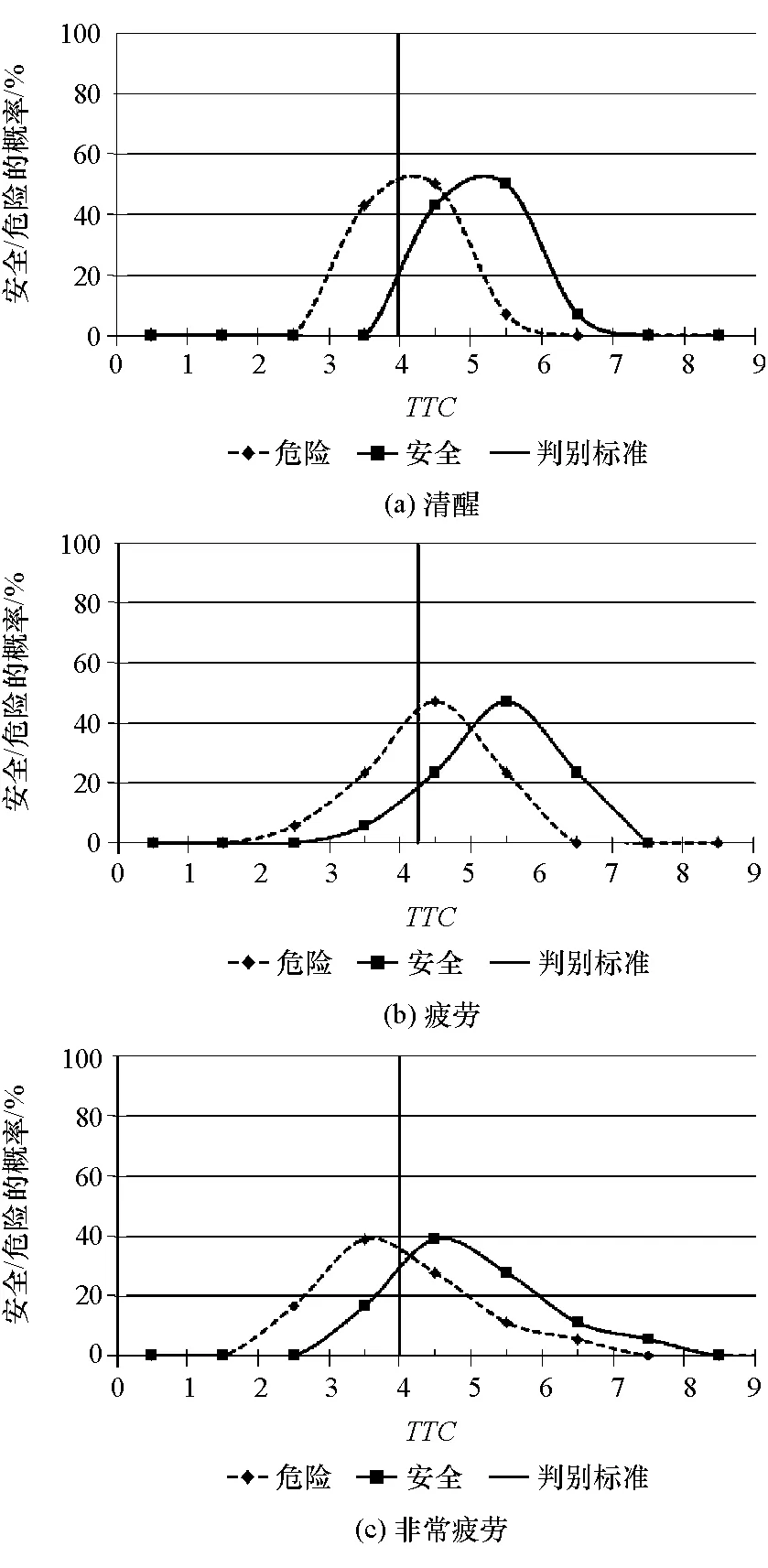
图4 制动工况中不同状态驾驶员的危险判断情况(60km/h)
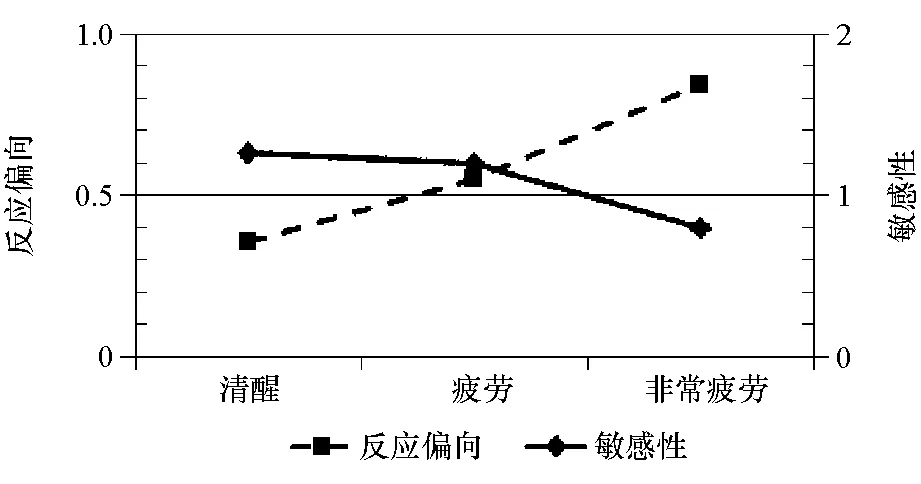
图5 制动工况不同状态时的敏感性和反应偏向(60km/h)
2.3 状态变化对驾驶员危险感知的影响机理
上述实验与计算结果解释了不同疲劳状态对驾驶员具体操作的影响,即随着驾驶员疲劳程度的加深,驾驶员的敏感性逐渐降低,造成其对交通工况维持注意的能力下降,由此使驾驶员错过了原本期望的超车或制动时刻,导致超车时的THW值或制动时的TTC值变小。同时由于反应偏向逐渐增加,即变得保守,造成驾驶员在清醒状态时的超车或制动时刻之前就感到危险,因此提前进行超车或制动行为,这使超车时的THW值和制动时的TTC值变大。相对而言,疲劳程度对敏感性的影响更加突出,通过计算不同条件下驾驶员正确判断安全工况的概率可以看到,在疲劳状态下,敏感性下降的程度在10%左右,而在非常疲劳状态时,敏感性下降的程度达到25%左右,如图6所示。这说明在疲劳状态时,驾驶员对环境是否危险的判断能力并没有明显下降,只是区分安全和危险的态度趋于保守。而在非常疲劳状态时,驾驶员在对判断安全和危险的态度变得更加保守的同时,其区分安全和危险的能力也明显下降,导致其无法快速确定自身所处的环境特征。
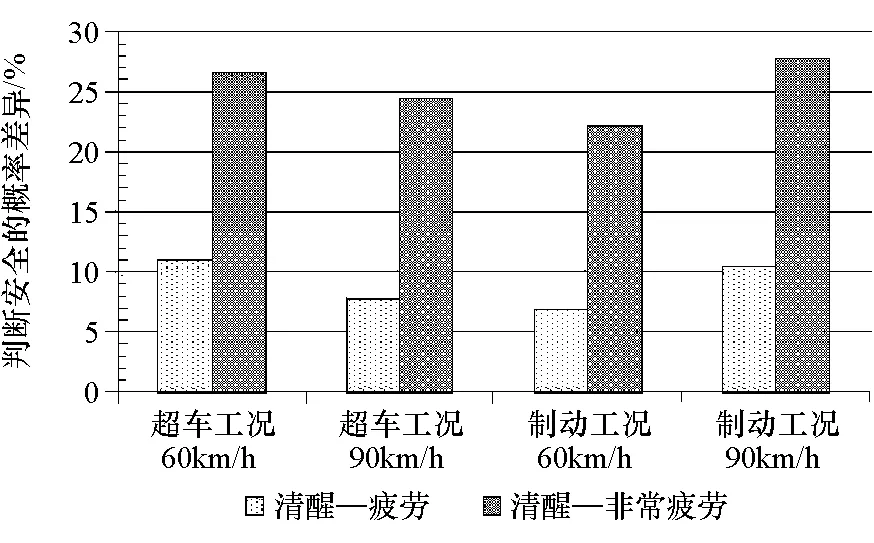
图6 敏感性结果在不同状态下的变化差异
综上所述,驾驶员危险感知特性变化的综合作用使其实际超车和制动行为的分散性增加,一致性降低。掌握这种内在机理的变化特点就可以为前向碰撞预警系统提供适应驾驶员状态变化的设计策略。
3 适应状态的碰撞预警系统设计策略
预警策略主要涉及预警时机与预警方式的设计,其中预警时机应符合驾驶员的危险判别结果,因此更侧重考虑驾驶员的反应偏向结果。而预警方式则须保证驾驶员对于危险状态的理解与注意,因此更侧重于提高驾驶员的敏感性。因此结合本文中的研究结果,从两方面来归纳前向碰撞预警系统的设计策略。
3.1 预警时机的适应式设计
在预警时机上,应适应驾驶员危险感知态度的保守趋势,将预警时机根据不同的疲劳状态适当提前,从而使预警的触发时刻能符合驾驶员对当时实际危险的感知结果。具体预警时机的提前量设计一方面要量化驾驶员的危险感知结果与预警时机之间的具体关系;另一方面要计算不同疲劳状态对其危险感知特性的影响程度。因此可将驾驶员的状态特征与实际的预警时机通过客观的感知结果联系起来,从而使预警适应驾驶员的反应偏向。
之前笔者通过Stevens幂定律量化了驾驶员在清醒状态时的危险感知与客观报警时机之间的关系,并结合C均值聚类方法计算了不同疲劳状态对驾驶员危险感知的影响程度,由此设计了适应不同疲劳状态的预警时机,取得了较好的效果[7]。
3.2 预警方式的适应式设计
预警方式的设计评价原则主要包含察觉性、理解性与接受性等3个方面[5]。从上述感知机理分析可以看到,由于疲劳状态时驾驶员区分安全与危险的能力下降不多,还能维持对环境危险的注意和判断能力,因此诸如视觉、听觉等常规的预警方式依然具有一定的预警效果。但在进入非常疲劳状态之后,驾驶员敏感性明显下降,导致其区分安全和危险的能力下降,致使其无法快速认知自身所处的行驶环境的危险状况。而常规的预警方式中,普通的听觉与视觉信号都能够指明当前的危险状况,但听觉信息需要花费时间去理解,视觉则无法第一时间传递信息,触觉方式虽然可以快速引起驾驶员的察觉,但它无法让驾驶员快速理解当前危险状况,因此这些方式对于处于非常疲劳的驾驶员来说效果很差,文献[8]中对于不同预警方式的研究也证明了上述结论。
针对状态的影响,适应式预警方式的设计原则是:保证察觉性与接受性,同时重点提高理解性,突显危险状况(或目标),从而让驾驶员能快速把握当前的危险状况,弥补其敏感性显著下降之后的危险辨别能力。
结合常规预警方式的缺陷分析,很难提高听觉和触觉方式在快速突显目标事件上的作用,而视觉方式具备快速指引驾驶员注意的能力[9],常规视觉预警信号由于置于驾驶室内部,和驾驶员观察道路信息之间存在视觉资源的干涉现象,因此对其察觉性和接受性的评价都较低,若将视觉预警信号和驾驶员需要注意的危险情况重合显示,则可引导驾驶员对危险情况的注意,达到突显危险情况的目的。
因此基于平视显示(head-up display, HUD)原理进行视觉预警方式的设计,其效果如图7所示,采用箭头的方式指出了可能发生碰撞危险的前方车辆,采用递进闪烁的梯形条纹来表示两车之间相对距离的变化结果,其中当刚触发纵向危险预警时采用2Hz的闪烁频率,在TTC=2.5时采用4Hz闪烁频率,同时在梯形条纹附近显示两车之间的具体相对距离结果。
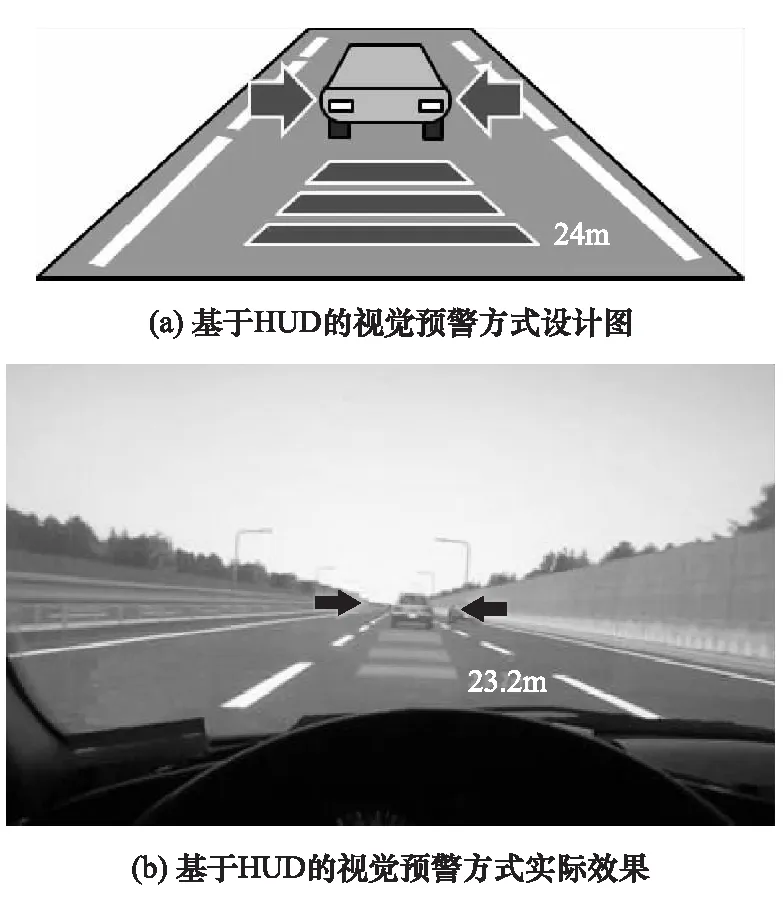
图7 基于HUD的适应式视觉预警方式设计
另外,考虑到视觉方案的察觉性较低,增加了能快速吸引驾驶员注意的触觉方式和语音预警作为视觉方案的补充,最终形成的适应式复合预警方案如表2所示。

表2 适用于不同疲劳状态的复合式环境预警方案
基于文献[8]中的方法测试了上述预警方案,并与欧洲AWAKE项目的疲劳预警方案(安全带卡扣振动、哔哔声、中后视镜处的红色闪烁LED,3者复合预警)做了对比,图8为比较结果。可以看出,当驾驶员处于非常疲劳的状态时,驾驶员对预警设计方案的理解性都得到显著提高,同时也使可用度得到了明显提升。在察觉性上,比较驾驶员在两种预警方案下的制动反应时间,结果如图9所示。由图9可以看出,所设计的预警方案在制动时间上快了约0.1~0.2s,这说明根据所设计的方案能够帮助非常疲劳状态的驾驶员快速把握当前驾驶环境中的危险状况,在第一时间做出相应的操作。
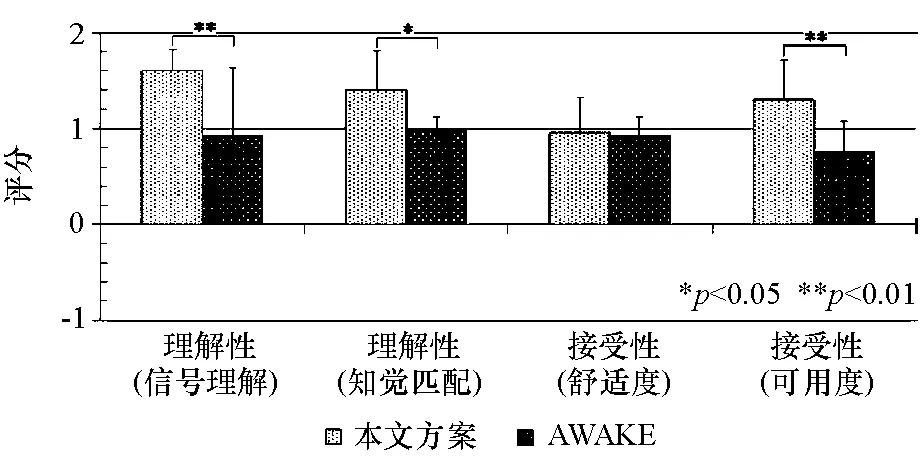
图8 本文方案与AWAKE方案的效果比较
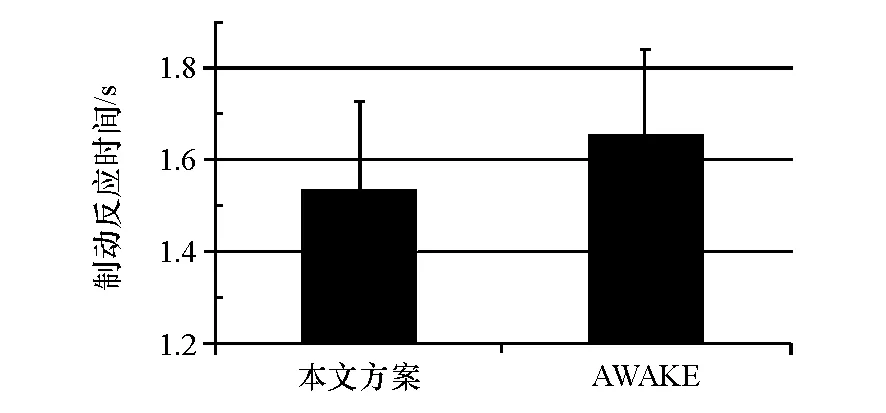
图9 本文方案与AWAKE方案制动反应时间比较
4 结论
利用信号检测理论,基于驾驶模拟仪研究分析了驾驶员在不同疲劳状态下,对于交通环境的危险感知判别机理。研究结果表明,随着疲劳程度的加深,驾驶员对于环境是否危险的反应偏向与敏感性都发生了明显变化,其区分环境安全与危险的态度变得越来越保守,而在进入非常疲劳状态后,其危险判别能力明显下降。基于上述机理研究的结果,提出了适应驾驶员不同状态的碰撞预警系统的设计策略:一方面,需要量化分析驾驶员危险感知的保守变化程度来设计提前报警的具体时机;另一方面,在预警方式上应尽量采用组合式的预警信号,着重保证报警信息的可理解性,所设计的基于HUD的复合式预警方案,取得了较好的预警效果。
[1] LEBLANC D, KIEFER R J, DEERING R K, et al. Forward Collision Warning Preliminary Requirements for Crash Alert Timing[C]. SAE Paper 2001-01-0462.
[2] Mitsuteru Kokubun, Hiroyuki Konishi, et al. Assessment of Drivers’ Risk Perception Using a Simulator[J]. R&D Review of Toyota CRDL,2004,39(2).
[3] SMITH S S, HORSWILL M S, CHAMBERS B, et al. Hazard Perception in Novice and Experienced Drivers: The Effects of Sleepiness[J]. Accident Analysis & Prevention,2009,41:729-733.
[4] CAMPBELL J, et al. Crash Warning System Interfaces: Human Factors Insights and Lessons Learned[R]. Final Report DOT HS 810 697, National Highway Traffic Safety Administration (NHTSA), USA,2007.
[5] WICKENS C D. Engineering Psychology and Human Performance[M]. New York, HarperCollins Publishers, Inc.,1992.
[6] KUCHAR J. Methodology for Alerting-system Performance Evaluation[J]. Journal of Guidance, Control and Dynamics,1996,19:438-444.
[7] 李家文,成波.针对驾驶员疲劳状态的防撞报警算法的研究[J].汽车工程,2013,35(6):490-493.
[8] 李家文,成波.驾驶员疲劳状态适应式预警方法的研究[J].汽车工程,2011,33(8):694-700.
[9] ERIKSEN C W, COLLINS J E. Temporal Course of Selective Attention[J]. Journal of Experimetnal Psychology,1969,80:254-261.
A Research on Collision Warning Strategy Adapted to Driver’sState Based on Hazard Perception Mechanism
Li Jiawen1, Cao Jiandong2& Cheng Bo3
1.DepartmentofVehicleEngineering,ZhejiangUniversityofTechnology,Hangzhou310014;2.ChinaAcademyofTransportationSciences,Beijing100029;3.DepartmentofAutomotiveEngineering,TsinghuaUniversity,StateKeyLaboratoryofAutomotiveSafetyandEnergy,Beijing100084
From the angle of driver’s hazard perception mechanism, the collision warning system adapted to driver’s drowsiness state is studied and the design principles for warning timing and ways of warning are analyzed. The results of study based on signal detection theory show that when driver makes judgment on hazard, with the deepening of drowsiness extent, driver’s attitude becomes more and more conservative, and when entering into deep drowsy state, driver’s hazard judgment ability also significantly lowers. Therefore, in devising collision warning, the warning timing should reasonably advances according to the quantitative relationship between hazard perception and drowsiness extent, and for the way of warning, the combinations of different warning signals should be adopted, putting emphasis on comprehensibility.
driver drowsiness; collision warning; signal detection theory; perception mechanism; warning strategy
*国家自然科学基金(51405438)资助。
原稿收到日期为2014年12月5日,修改稿收到日期为2015年2月4日。
