汽车人椅系统的低频多向振动试验与参数识别*
2016-04-11舒红宇陈仙宝梅晓磊
舒红宇,陈仙宝,梅晓磊,罗 霜
(1.重庆大学汽车工程学院,重庆 400044; 2.重庆大学,机械传动国家重点实验室,重庆 400044;3.国家摩托车质量监督检验中心,西安 710032)
2016176
汽车人椅系统的低频多向振动试验与参数识别*
舒红宇1,2,陈仙宝1,梅晓磊3,罗 霜1
(1.重庆大学汽车工程学院,重庆 400044; 2.重庆大学,机械传动国家重点实验室,重庆 400044;3.国家摩托车质量监督检验中心,西安 710032)
人-车的相互作用对汽车的操纵稳定性有重大的影响,而人椅系统的低频多向振动特性的研究对于人-车相互作用的分析具有重要的意义。为此本文中建立了人椅系统的12自由度三维动力学模型,并利用多向振动试验台架在0.5~5Hz频率范围内进行了人-椅多向振动试验,识别出36个低频多向振动特性参数。结果表明:提出的低频多向振动试验及参数识别方法可行,其参数可表征汽车人椅系统的低频多向振动特性。
人椅系统;低频多向振动;参数识别;动力学模型
前言
节能环保使汽车微型化成为重要的发展方向,但随着微型化的发展,当其质量和尺寸更加接近于人体后,人-车的相互作用及其动力学行为耦合将显现出来,并对汽车的操纵稳定性产生不可忽略的影响。人-车的相互作用比较复杂,通过人体与座椅坐垫和靠背、手与转向盘、脚与底板等连接界面来实现,其中最主要还是通过人体和座椅组成的系统。因此,人椅系统作为人-车的主要作用界面,其多向振动特性的研究将是人-车相互作用分析的突破点。
目前对人椅系统的三维多向振动特性的研究还很少。文献[1]和文献[2]中首次考虑了人体上下体间的连接和平面转动,将人体在X-Z平面简化为3个刚体;文献[3]和文献[4]中利用人体动力学表观质量模型考察了人体多向振动,但没有研究上下体的连接和转动特性。本文中针对汽车操稳性建立了包括平动和转动的人椅系统多向振动模型,综合考虑人体运动和汽车操稳性涉及的频率特征[5-8],选定在0.5~5Hz频率范围内进行了人-椅多向振动试验,识别出36个低频多向振动特性参数,首次对人椅系统的低频多向振动特性进行了探讨。
1 人椅系统低频多向振动模型
人椅系统的模型简化和表达直接与其振动特性试验和参数识别相关,既要考虑基本表达人体与座椅的三维多向作用,以及体现坐姿人体姿态,同时又方便试验、减少须识别的动力学参数数目。本文中建立了三维12自由度的人椅系统动力学模型,如图1所示。人体被简化为两个刚体,人体的头部和上身为上体,质量为m2,转动惯量为I2;人体的髋部、臀部和腿部为下体,质量为m1,转动惯量为I1。上、下体与座椅靠背、坐垫的作用连接分别简化为在质心q2和q1处通过3个拉压弹簧和3个扭转弹簧、阻尼器与座椅相连。上、下体之间在p点也通过3个拉压弹簧和3个扭转弹簧、阻尼器连接。如此,上、下体在空间上均具有纵向、横向、垂向、侧倾、俯仰和横摆6个自由度,整个模型共计36个动力学参数。另外,座椅靠背、坐垫的刚度和阻尼分别计在q2和q1连接点的弹簧、阻尼器中。

图1 12自由度人椅模型结构图
上、下体的运动方程组如式(1)和式(2)所示。式中:x,y,z,θx,θy和θz表示3个平移坐标和3个转动坐标,下标0表示座椅底座,下标1表示下体,下标2表示上体;k,c,m和I分别为刚度、阻尼、质量和转动惯量;M1~M6分别为作用在下体和上体的力矩。
(1)
(2)
力矩由两部分构成,以M1为例,下体与坐垫和下体与上体间的绕X轴的作用力矩为
(3)
其中M(x)1p=S1y·f(z)p-S1z·f(y)p
(4)
式中:M(x)1p为上体在p点处y和z方向拉伸变形产生的对下体绕X轴的转矩;f(y)p和f(z)p分别为上体在p点处y和z方向上对下体的作用力;S1y和S1z分别为p点相对q1在y和z方向的偏移距离。
2 人椅系统低频多向振动试验
对人椅系统同时施加x,y,z,θx,θy和θz6个方向的激励非常困难。为此,本文中为便于研究人-椅低频多向振动特性,提出了分别激振的试验方案和依次进行参数识别的方法,研制出一种能借助相同的激振部件、运动机构等,通过拆装组合分别构建纵向、横向和垂向平动及转动的人-椅振动专用试验台架[9],如图2所示。该试验系统主要由底座、伺服电机驱动的偏心激振机构、座椅及其安装底板、滑动/转动导轨和脚踏板等构成。
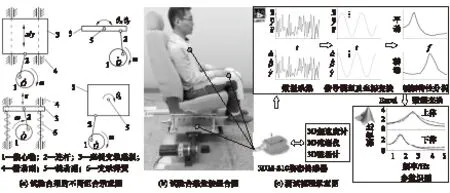
图2 人-椅低频多向振动试验系统
偏心激振机构通过座椅底板对人椅系统进行激振,为了既能激振出系统应有的动态响应特性,同时人体又能承受,通过反复试选,偏心激振机构的偏心距选定为1~3mm;振幅按正弦曲线变化进行激振,频率范围为0.5~5Hz,频率间隔为0.1Hz。
座椅底板的激励和人体的响应采用3个新型的3DM-S10姿态传感器来测量,该传感器可同时测量并输出其x,y和z方向的加速度,θx,θy和θz方向的角速度和姿态响应时间序列。因为姿态传感器输出的是传感器自身坐标系下的惯性矢量分解值,因此需要利用其姿态响应时间序列,对输出值进行坐标变换,以得到统一坐标系下的激励和响应。另外,为表征人体为上下两个刚体,专门特制加工了贴合人体表面的轻型塑料上下壳体。
试验前按照GB/T 17245—2004国家标准,并根据实际现状,选择我国第90百分位成年人为样本,进行了人体尺寸、质心位置、质量和转动惯量的测量和估算。人体质心相对塑料上、下壳体表面的姿态传感器安装孔的位置坐标也事先计算确定,该位置坐标用于将人体表面姿态传感器安装位置的x,y和z加速度响应,通过特殊编制的坐标变换处理程序,换算为人体上下体质心的加速度响应。
座椅选用某汽车公司的典型款,靠背角度调整到常态位置;被试者在试验时要求自然放松,上身贴着靠背,处于正常坐姿状态。
3 人椅系统低频多向振动参数识别
本文中以12自由度人椅系统模型为框架,通过拟合人椅台架试验的试验数据,进行模型的动力学参数识别。
在人椅系统低频多向振动试验中,采用分别单个方向、正弦扫描激振的方式,因此不必按照式(1)和式(2)的12个方程同时进行试验曲线拟合和参数识别,而是根据单个方向激振时人椅系统的主要振动模态,对式(1)和式(2)进行简化,识别出该振动模态下的主要参数,然后依次获得所有参数,这样有利于降低识别难度,同时也提高了识别精度。值得指出,本文中人椅系统低频多向振动参数均假设为线性,因此根据线性系统的叠加原理,单个方向激振与多个方向同时激振的振动参数,理论上是相同的。本文中单个方向激振时人椅系统的主要方向的振动响应称为主运动,其它方向相伴产生的较小振动响应,称为次运动。
本文中设计的试验和参数识别次序是先从简单容易的转动方向上的动力学参数识别开始,逐步识别和确定其它参数。下面以X方向单独转动加振和单独平动加振,分别说明试验和参数识别的具体过程和方法。
X方向单独转动加振时,人椅系统中人体上下体绕X轴转动最显著,为主运动,Y方向的平动和绕Z轴的转动较小,是由于质心位置偏离转动中心相伴产生的,为次运动,X和Z方向的平动和绕Y轴的转动近乎为零。因此该试验时主要显现和最能有效识别的参数是kq1θx,kq2θx,kpθx,cq1θx,cq2θx和cpθx,Y方向的平动和绕Z轴转动的动力学参数如kq1y等也可由次运动方程的曲线拟合来得到,但信噪比和识别可靠性相对较低,故放在Y向单独平动和Z向单独转动激振时进行识别。此时,式(1)和式(2)缩减为如下的两个动力学方程:
(5)
(6)
对式(5)和式(6)进行线性化处理,并忽略主要运动之外的数据项,化简之后的频域方程为
(-ω2I1x+kq1θx+jωcq1θx+kpθx+jωcpθx)θ1x-(kpθx+
jωcpθx)θ2x-(kq1θx+jωcq1θx)θ0x=0
(7)
(-ω2I2x+kq2θx+jωcq2θx+kpθx+jωcpθx)θ2x-(kpθx+
jωcpθx)θ1x-(kq2θx+jωcq2θx)θ0x=0
(8)
以式(7)和式(8)为模型结构,利用遗传算法拟合上、下体的试验数据,以试验数据和拟合曲线的残差平方和最小为优化目标,获得合适的参数。选择不同初值得到的基本稳定的识别值即为该模型的参数值,图3(a)为单向X转动试验数据和参数拟合曲线的对比图。同理进行单向Y和Z转动试验,其试验数据和参数拟合曲线如图3(b)和图3(c)所示。

图3 转动试验识别图
X平动激励下的人体运动中,上、下体X平动方向的响应为主运动、绕Y轴转动的响应为较大次运动。忽略主运动和较大次运动之外的数据项,化简之后的频域方程为
(-ω2m1+kq1x+jωcq1x)X1-(kpx+jωcpx)zq1θ1y=
(jωcq1x+kq1x)X0
(9)
(-ω2m2+kq2x+jωcq2x)X2-(kpx+jωcpx)zq2θ2y=
(jωcq2x+kq2x)X0
(10)
(-ω2I1y+kq1θy+jωcq1θy+kpθy+jωcpθy)θ1y-(kpθy+
jωcpθy)θ2y-(kq1θy+jωcq1θy)θ0y=0
综上所述,依地酸钙钠或DMSA联合水溶性维生素可作为临床上治疗慢性铅中毒的首选治疗方案,其效果远优于目前临床使用的依地酸钙钠或DMSA的单独治疗。
(11)
(-ω2I2y+kq2θy+jωcq2θy+kpθy+jωcpθy)θ2y-(kpθy+
jωcpθy)θ1y-(kq2θy+jωcq2θy)θ0y=0
(12)
此时的转动动力学参数初值利用前面识别出的数据。
同理进行Y轴和Z轴的平动试验,各轴单向平动试验和参数识别结果如图4所示。

图4 平动试验识别图
12自由度人椅系统所有36个动力学参数的识别结果如表1所示。
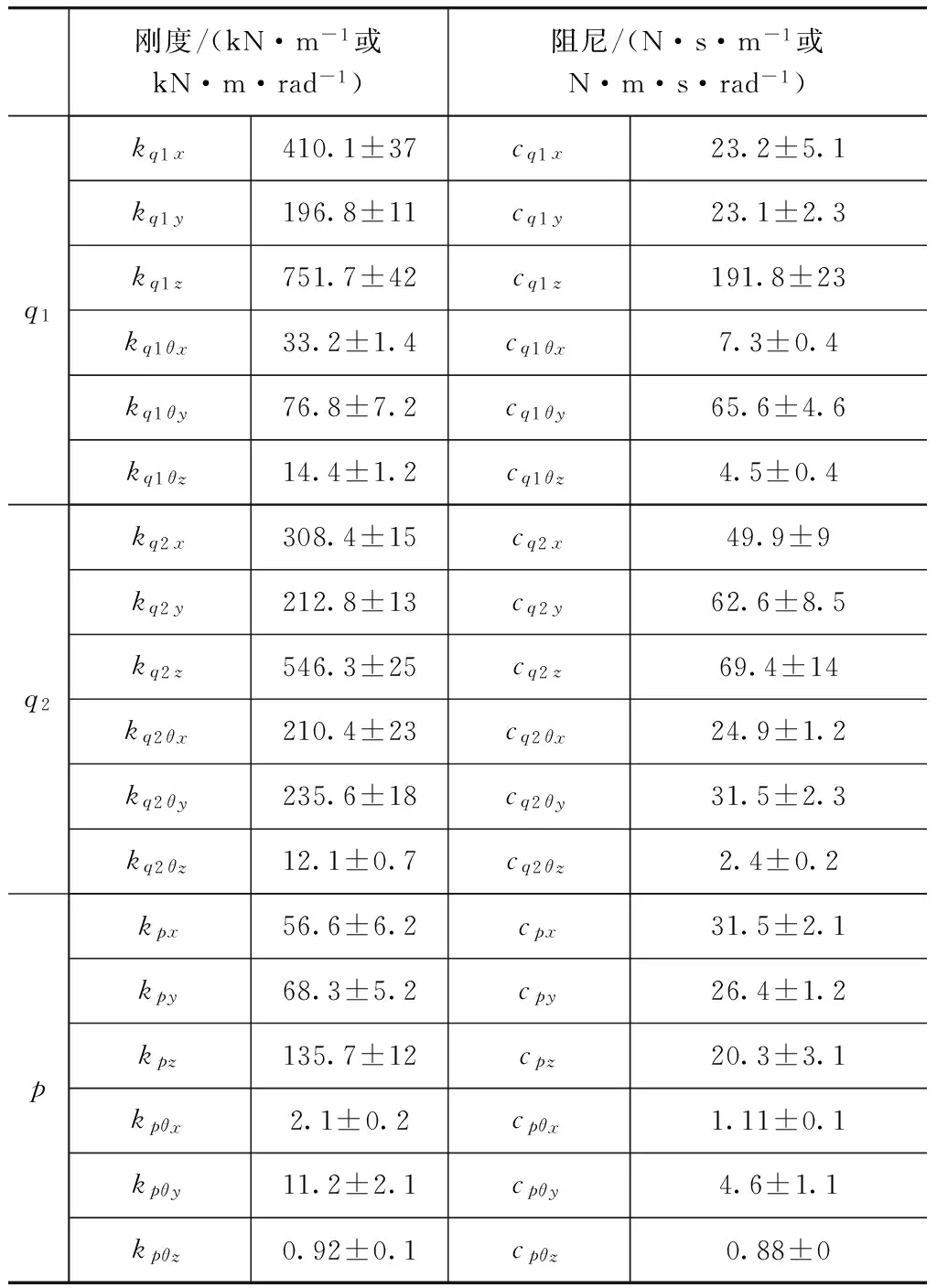
表1 12自由度人椅模型识别参数
从表中可以看出:由于非线性、个体状态和姿态等影响,多次试验和参数识别的结果有一定差异,且刚度参数变化较小,阻尼参数变化较大。
4 个体差异与非线性分析
为初步探究个体差异对动力学参数的影响,本文中进一步对不同质量、身高[10]的人体进行了对比试验和参数识别。
为分析质量差异对动力学参数的影响,选取受测者1(175cm,70kg)与受测者2(174cm,62kg)进行试验对比,二者在试验过程中保持相同的坐姿,结果见图5。
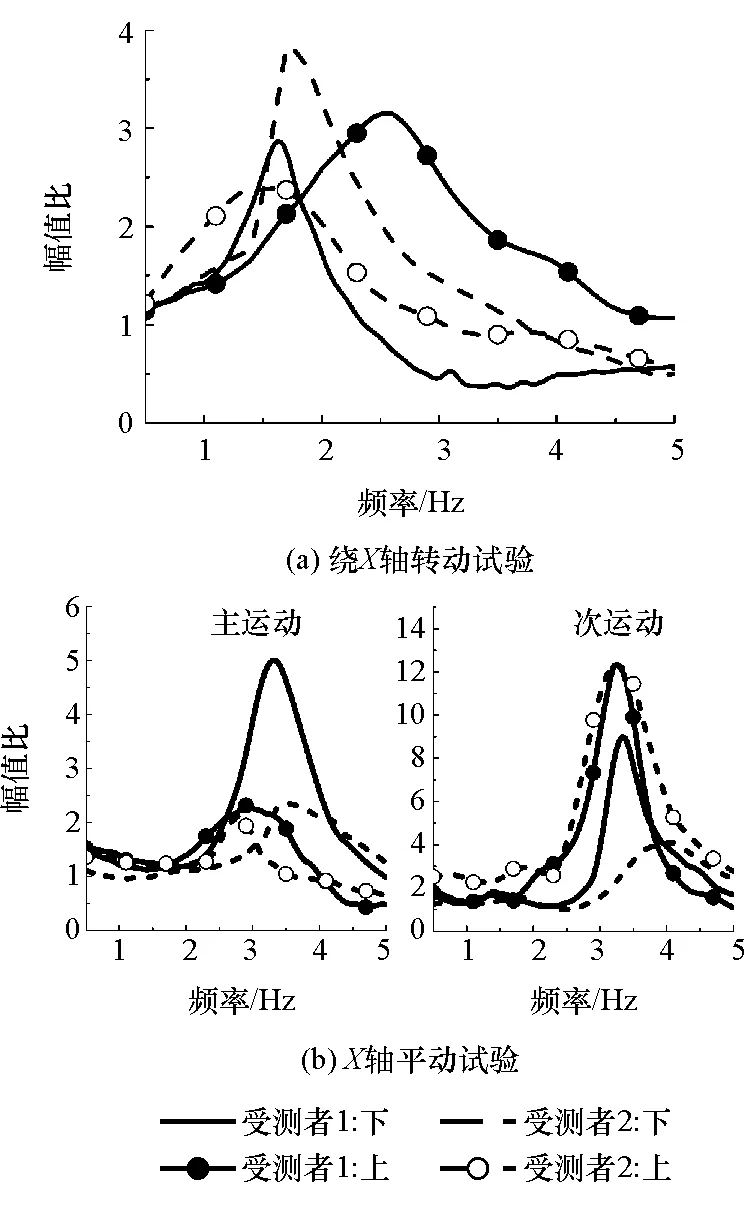
图5 不同质量受测者试验曲线对比图
由图5可知:转动试验中,受测者1的上体共振频率明显大于受测者2,识别结果表明质量较大者的上体刚度有大幅度增加;平动试验中,受测者1的下体带宽明显大于受测者2,识别结果显示质量较大者下体阻尼更小。
为了分析身高差异对动力学参数的影响,选取受测者2(174cm,62kg)与受测者3(164cm,63kg)对比,二者在试验过程中保持相同的坐姿,结果见图6。
由图6可知:转动试验中,受测者2的上体共振频率与受测者3基本相同而其带宽比受测者3稍大,识别结果表明身高较高者的上体阻尼有小幅度增大;平动试验中,受测者2的上体共振频率明显比受测者3小而带宽只稍小于受测者3,识别结果显示身高较高者的阻尼与刚度均减小。

图6 不同身高受测者试验曲线对比图
对人椅系统进行线性化处理具有一定误差,为探究人椅系统的非线性特性的影响程度,本文中采用适当的不同激励强度对系统进行激振,偏心激振机构的激振幅值分别选取为1,2和3mm,对人椅系统进行Z轴转动和平动试验以及参数识别,受测者坐姿等均保持相同状态,其对比如图7所示。

图7 不同激励下的参数变化
从图中可以看出:增大激励,人椅系统振动幅度随之增加时,转动和平动的刚度参数具有一定的减小;而阻尼变化却未呈现同样的规律,随着激振幅度的增加,上体转动阻尼减小,而下体转动阻尼反而增大;平动阻尼则先减小后增大,这可能与座椅的凹面形状有关。
5 结论
针对影响微型汽车操稳性的人椅系统低频多向振动问题,提出的12自由度人椅系统动力学模型、台架试验和参数识别方法具有可行性和参考价值,得出以下结论。
(1) 虽然由于非线性因素的存在,提出的12自由度人椅系统线性模型具有一定误差,但由于能表征人体三维多向振动的动态特点,且其动力学参数比较容易通过台架试验和参数识别来确定,因此该模型具有一定合理性。
(2) 采用安装在贴合人体上下体表面的塑料壳体上的姿态传感器、偏心激振机构、转动/移动副部件等进行组合实现的依次单向激振的人椅系统台架试验和逐次参数识别的方法,简单可行,具有可接受的精度。
(3) 参数识别结果表明:同一人体的坐姿变动对参数影响微小;不同人体的质量差异对参数影响显著,身高差异的影响较小。识别出的36个动力学参数,对微型汽车操稳性动态分析等系统建模和仿真具有一定的参考价值。
人椅系统三维多向振动特性比较复杂、影响因素较多,还需要进行大量的、综合考虑不同座椅、人体及其姿态的试验和统计分析,以得到更为准确的动态特性参数值。
[1] 王春洁,曾福明.弹射座椅动态舒适性与人椅动力学特性研究[J].北京航空航天大学学报,2004,30(4):375-378.
[2]CHOYounggun,YOONYong-San.Biomechanicalmodelofhumanonseatwithbackrestforevaluatingridequality[J].InternationalJournalofIndustrialErgonomics,2001,27:331-345.
[3]TOWARDMGR,GRIFFINMJ.Apparentmassofthehumanbodyintheverticaldirection:effectofafootrestandasteeringwheel[J].JournalofSoundandVibration,2010,329:1586-1596.
[4]ZHENGGuangtai,etal.Ananalyticmodelofthein-lineandcross-axisapparentmassoftheseatedhumanbodyexposedtoverticalvibrationwithandwithoutabackrest[J].JournalofSoundandVibration,2011,330:6509-6525.
[5] 余志生.汽车理论[M].北京:机械工业出版社,2009.
[6] 邵建,董益亮.汽车操纵稳定性的频率特性分析方法[C].2009中国汽车工程学会年会论文集,2009:1813-1817.
[7] 刘喜东,刘应东.考虑转向速度的汽车操纵稳定性分析[J].机械工程学报,2011,47(10):95-100.
[8] 丁玉兰.人机工程学 [M].北京:北京理工大学出版社,2005.
[9] 舒红宇,陈才勇,石婉青.人椅动态特性试验台架的零部件及应用:201410461845.0[P].2014-09-12.
[10] 李睿,郭立新.车辆人椅系统主要参数对舒适度敏感性分析[J].汽车工程,2015,37(1):83-87.
Low-frequency Multi-direction Vibration Test and ParameterIdentification of Vehicle Human-seat System
Shu Hongyu1,2, Chen Xianbao1, Mei Xiaolei3& Luo Shuang1
1.CollegeofVehicleEngineering,ChongqingUniversity,Chongqing400044;2.ChongqingUniversity,StateKeyLabofMechanicalTransmission,Chongqing400044;3.ChinaNationalMotorcycleTestingCenter,Xi’an710032
Human-vehicle interaction has significant effects on the handling stability of vehicle and the study on the low-frequency multi-direction vibration characteristics of human-seat system, main interface of human-vehicle interaction, has great significance in the analysis on human-vehicle interaction. In view of this, a 12 DOF 3D dynamics model for human-seat system is established, and a human-seat multi-direction vibration test in a frequency range of 0.5-5Hz is conducted on a multi-direction vibration test bench, and 36 parameters of low-frequency multi-direction vibration characteristics are identified. The results show that the scheme proposed of low frequency multi-direction vibration test and parameter identification is feasible and the parameters identified can represent the low frequency multi-direction vibration characteristics of vehicle human-seat system.
human-seat system; low-frequency multi-direction vibration; parameter identification; dynamics model
*国家自然科学基金(51275542)资助。
原稿收到日期为2015年8月17日,修改稿收到日期为2015年9月21日。
