面向车辆主动避撞的三维虚拟危险势能场设计*
2016-04-11李云伍
冀 杰,姬 鹏,彭 和,李云伍
(1.西南大学工程技术学院,重庆 400715; 2.河北工程大学装备制造学院,邯郸 056038;3.滑铁卢大学车辆研究中心(WatCAR),安大略省 N2L3G1,加拿大)
2016167
面向车辆主动避撞的三维虚拟危险势能场设计*
冀 杰1,3,姬 鹏2,3,彭 和1,李云伍1
(1.西南大学工程技术学院,重庆 400715; 2.河北工程大学装备制造学院,邯郸 056038;3.滑铁卢大学车辆研究中心(WatCAR),安大略省 N2L3G1,加拿大)
为准确全面地反映车辆在不同道路工况下的车路一体化危险行驶状况,并通过主动避撞系统有效降低道路交通事故发生率,本文中分别利用三角函数和指数函数构建了道路和障碍物三维虚拟危险势能场,以实现车辆的主动避撞,并对其关键结构参数及其设计依据进行了分析,最后分别在恒速和变速障碍物的道路工况下进行了主动避撞仿真。结果表明,采用该方法,被控车辆能根据三维虚拟危险势能场跟随理想的路径并通过路径跟踪实现车轮的主动避撞。
车辆;主动避撞;危险势能场;路径跟踪
前言
随着我国汽车保有量的不断增加和道路交通状况的日益复杂,由道路车辆碰撞引起的交通事故已经成为影响我国社会生产和居民生命安全的重要原因之一。而车辆主动避撞系统能够利用车载传感器和信息处理模块对道路交通信息及行驶安全状态进行实时准确地感知和判断,并通过信号预警、主动干预驾驶等方式有效避免或减轻碰撞伤害,是降低道路交通事故发生率、提高车辆主动安全性的重要途径[1-2]。
道路车辆的行驶危险状态评估是实现车辆主动避撞功能的关键技术。目前,市场上的车辆主动避撞系统主要依据道路前方障碍物与被控车辆之间的纵向间距、相对速度等运动状态信息,实时判断车辆追尾相撞的发生概率,并对车辆行驶的危险状态进行评估,最终通过车辆直行制动的驾驶干预实现主动避撞功能[3]。然而,在此类主动避撞系统的行驶危险状态评估过程中,较少考虑道路结构参数和交通状况变化而产生的影响;另外,在实际的道路交通环境下,当道路路面附着系数较小或者障碍物与车辆相对间距过小时,直行制动操作无法保证车辆主动避撞功能的实现[4-5]。因此,如何构建车路一体化的车辆行驶危险评估方法并依据评估结果实时准确地完成车辆避撞行为是实现车辆避撞系统主要功能的重要保证。
本文中以车辆的运动状态、道路结构参数和车-路-障碍物之间的位置关系为变量,构建道路车辆行驶的动态三维虚拟危险势能场,并基于该势能场对车辆行驶危险状态进行综合描述和定量评估,从而获得理想的主动避撞路径并进行跟踪,最终实现车辆的主动避撞功能,关键流程如图1所示。

图1 基于危险势能场的主动避撞流程图

图2 车辆主动避撞运动示意图
受人工势能场理论和弹性力场理论的启发[6-9],本文中根据道路结构参数、交通行驶状况和前方障碍物位置等信息(如图2所示),利用三角函数和指数函数构建能够准确、全面反映车路一体化危险行驶状态的道路行驶三维虚拟危险势能场。与传统的人工势能场理论相比,该方法不仅保留了算法成熟高效、计算形式简单明了的优点,同时克服了传统人工势能场法存在局部极小点和目标不可达等问题,从而实现智能车辆的路径规划及跟踪的目标,为道路车辆主动避撞系统的设计提供了一种新的思路。该势能场主要由道路势能场、主车道引力场和障碍物斥力场共同构成。
1.1 道路势能场构建
假设某结构化道路由右侧的主车道和左侧的超车道共同构成,其中,X和Y分别为道路坐标系的横坐标(道路宽度方向)和纵坐标(道路长度方向),如图3所示。

图3 道路势能场坐标系
根据车辆主动避撞系统的设计原则,在道路上无障碍物的工况下,车辆应尽量保持在主车道的中心线上行驶,并避免发生车道偏离;而在道路上有障碍物工况下,车辆应通过转向操作防止与前方障碍物发生碰撞,同时要避免与道路两侧的路沿发生碰撞。因此,道路势能场的构建主要与道路的宽度X和障碍物的位置(Xo,Yo)等参数有关。
当车辆在道路势能场中行驶时,假设车辆越靠近道路两侧路沿时危险势能越大,且最大危险势能为1;而当车辆在车道中心行驶时危险势能最小,且最小危险势能为0;另外,设定两车道中间位置的危险势能为Pm,其取值范围设定为0≤Pm≤1。根据以上假设可知,道路中心和两侧的危险势能保证了车辆在车道中心行驶时的危险系数小于车辆换道的危险系数,从而使车辆在无障碍物工况下,能够保持在车道中心行驶。利用三角函数构建道路的三维虚拟危险势能场并进行归一化,可表示为
(1)
式中:Lr为车道的宽度;A(X,Y)为道路危险势能的大小随道路宽度X及道路长度Y变化的函数,通过改变道路危险势能三角函数可获得不同的A(X,Y)幅值。
道路危险势能的幅值A(X,Y)随道路宽度方向X位置而变化的函数为
(2)
式中:Xl和Xr分别为超、主车道中心线的横坐标。
假设主车道前方障碍物的坐标为(Xo,Yo),将障碍物附近的横向位置范围(Xl~Xr)和纵向位置范围(|Y-Yo|≤Db)作为车辆的转向避撞区域,即此范围内的道路势能场Pr(X,Y)幅值为零。另外,从车辆的动力学特性和运动特性方面考虑,基于道路势能场获得的主动避撞轨迹应相对平滑。因此,在转向避撞区域和车道保持区域之间的横向位置范围(Xl~Xr)和纵向位置范围(Db≤|Y-Yo|≤Dt)内,道路势能应随着纵向位置变化平滑过渡。而车道保持区域范围内的道路势能场Pr(X,Y)幅值不随纵向长度发生变化。综合以上设计原则,道路危险势能的幅值A(X,Y)随道路长度Y位置的变化函数可表达为
(3)
式中:Db>0和Dt>0分别为转向避撞区域和过渡区域的纵向范围。
道路势能场的幅值可以表示为
A(X,Y)=A(X)×A(Y)
(4)
将道路横向位置X、障碍物位置(Xo,Yo)、道路中心危险势能Pm和危险势能幅值A(X,Y)代入道路势能函数中,可得到道路上不同位置的三维虚拟危险势能场及势能等高图,如图4所示。
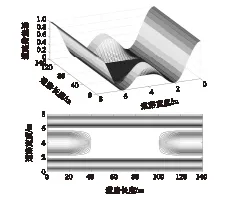
图4 道路虚拟危险势能场(Pm=0.5)及等高势能图
1.2 主车道引力场构建
根据车辆主动避撞系统的设计原则,当车辆完成转向避撞任务后,应尽快回到道路主车道中心线上行驶;同时,为了能够在危险势能场下利用最大梯度下降法实现路径前向搜索功能并获得理想的避撞路径,需要在车辆的前向避撞路径搜索距离范围内,构建主车道引力场对车辆运动进行引导,表达式如下:
(5)
式中:Yv为车辆质心在道路坐标系下的纵向位置;Ds为车辆前向路径搜索距离范围。根据式(5)可以得到道路主车道引力场的势能等高图,如图5所示。

图5 道路主车道引力场等高势能图
1.3 障碍物斥力场构建
在构建道路障碍物斥力场时,应综合考虑车辆制动、转向性能和道路结构参数等因素,不仅要为车辆主动避撞预留足够的制动距离并保证车辆在转向避撞过程中的操纵稳定性,同时还要为车辆的避撞路径规划提供定量的设计依据。本研究以障碍物的几何中心为原点,利用人工势场理论中的指数函数,构建障碍物周围的三维虚拟斥力场,可得到车辆在避撞过程中的障碍物危险势能值为
(6)
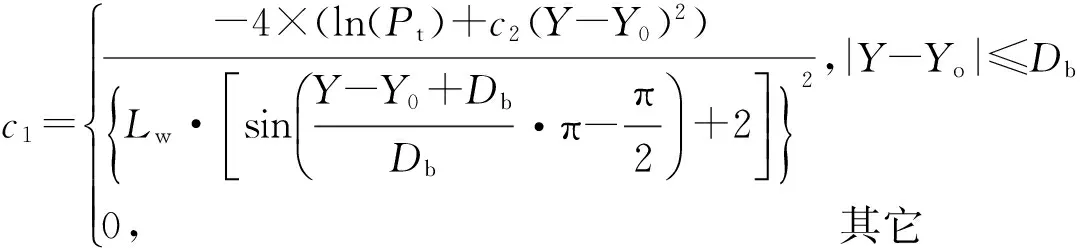
式中:(Xo,Yo)为道路坐标系下障碍物的几何中心坐标。根据式(6)可知,当车辆越靠近障碍物时,其危险系数会越高;Pt为车辆靠近障碍物时的危险势能切换阈值,通过调整该阈值的大小能够改变障碍物斥力场的三维几何形状,并对斥力场势能值进行归一化;c1和c2分别为障碍物斥力场在道路长度和宽度方向上的变化系数,该系数主要由危险势能切换阈值、道路结构参数及车辆的动力学特性共同确定。因此,本文中根据车辆主动避撞系统的实际功能需要对参数c1和c2进行计算。
假设道路上被控车辆和障碍车辆的初始速度分别为v1和v2,4个车轮的制动力相同且单个车轮的最大制动力为Fm,被控车辆的总质量为m,前方障碍车辆的车身长度为Ll。为了保证被控车辆在发生碰撞前有足够的时间做出驾驶行为决策,应保证主动避撞行为决策时的车辆位置到障碍物中心的距离至少为
(7)
根据障碍物斥力场的定义,被控车辆应在距离障碍车辆距离为Db处进行主动避撞驾驶行为决策,此时,被控车辆刚进入障碍物斥力场,即此时斥力场的危险势能为零,可得出障碍物斥力场的纵向系数c2的表达式为
(8)
(9)
当障碍物斥力场的横向系数c1和纵向系数c2确定之后,将其带入式(6)中,即可获得障碍物三维虚拟斥力场和势能等高线图,如图6所示。
1.4 道路车辆三维虚拟危险势能场构建
将道路势能场、主车道引力场和障碍物斥力场进行叠加,即可得到用于主动避撞系统的道路车辆虚拟危险势能三维图,如图7所示。下一节将根据构建的虚拟危险势能场进行主动避撞路径规划及路径跟踪。
Pd(X,Y)=Pr(X,Y)+Ps(X,Y)+Po(X,Y)
(10)

图7 道路障碍三维虚拟危险势能场
另外,车辆尺寸相对于道路尺寸无法忽略不计。因此,构建车辆坐标系的横坐标和纵坐标分别为x和y,假设车辆坐标系的原点在道路坐标系中的位置为(Xv,Yv),车身上某点在车辆坐标系中的位置为(xv,yv),车身相对于道路坐标系的横摆角度为φ,则车身上某点在道路坐标系下的位置(X,Y)可表示为
(11)
将车身上某点的坐标位置(X,Y)代入到式(10)三维虚拟危险势能函数中,就能够准确地获得车身上不同位置在道路上坐标系下的实际危险势能值。
2 基于危险势能场的避撞路径规划
本文中提出的主动避撞三维虚拟危险势能场,将道路交通环境信息抽象为道路势能场函数、主车道引力场函数和障碍物斥力场函数,利用该合力场函数能对道路车辆的危险行驶状态进行量化[10-11],从而为主动避撞系统的实时局部路径规划提供定量设计依据,具体步骤如下。
(1) 根据被控车辆的动力学和运动学特性,确定车辆在T时刻的搜索范围、移动步长γ和移动角度θ的范围。
(2) 根据T时刻的道路结构参数和障碍物的位置、速度信息,建立实时的三维虚拟危险势能场模型,并根据设定的移动步长和移动角度范围对搜索范围内的势能场模型进行离散化处理。
(3) 确定车辆在T时刻的位置(Xv,Yv),并根据式(10)获得该位置的危险势能之和,进而计算出车辆在势能场、引力场和斥力场环境下的方向作用力。
FU=-PU(Xv,Yv)=-PR(Xv,Yv)-PO(Xv,Yv)=
(FRX+FRY)+(FOX+FOY)
(12)
其中:
(13)
(4) 通过作用力矢量合成方法对T时刻的势能场进行分析,获得车辆在三维虚拟危险势能场环境下的方向合成力FS和避撞轨迹方向角θS,如图8所示。

图8 三维虚拟危险势能场下的作用力方向
(5) 依据获得的合成力矢量方向θ及设定的离散化步长γ,根据式(14)计算出车辆主动避撞路径下一步长的位置(Xv+1,Yv+1)。
(14)
(6) 获得T+1时刻时的被控车辆位置(Xv+1,Yv+1)和障碍车辆位置(Xo+1,Yo+1),并根据该位置信息返回第二步重新构建T+1时刻的三维虚拟危险势能场。
(7) 以此类推,能够在车辆的行驶过程中实时搜索并规划出主动避撞路径。
当前方障碍物为静止状态时,通过道路三维虚拟危险势能场可得到车辆的主动避撞路径,如图9所示。

图9 危险势能场等高线图及主动避撞路径
利用该方法获得的主动避撞路径主要由道路势能场、主车道引力场和障碍物斥力场合成的总场强共同确定,并在虚拟势能场的设计过程中考虑了道路结构参数和车辆动力学与运动学等影响因素,从而将传统的人工势能场理论应用于主动避撞系统设计中。另外,根据该方法得到的主动避撞路径,可根据道路障碍物的位置和速度等信息实时进行改变,能够适应复杂的道路交通状况。
3 避撞路径跟踪仿真
为验证提出的三维虚拟危险势能场方法的可行性和有效性,本文中针对障碍车辆的不同运动情况,在Carsim仿真环境下对主动避撞系统的路径规划与跟踪进行仿真分析,仿真环境如图10所示。

图10 Carsim主动避撞仿真环境
假设某车辆在具有双车道的结构化道路上行驶时,主车道前方出现一辆速度较慢的障碍车辆,如图10所示。为避免与障碍车辆发生碰撞事故,应根据当前的实际道路交通状况构建适当的三维虚拟危险势能场,并依此获得理想的避撞路径。利用MATLAB软件对主动避撞路径规划进行仿真分析,仿真的参数及其数值如表1所示。同时,采用Carsim软件中比较成熟的最优驾驶员模型对避撞路径进行跟踪,验证获得的主动避撞路径是否能够满足实际车辆的动力学和运动学要求。
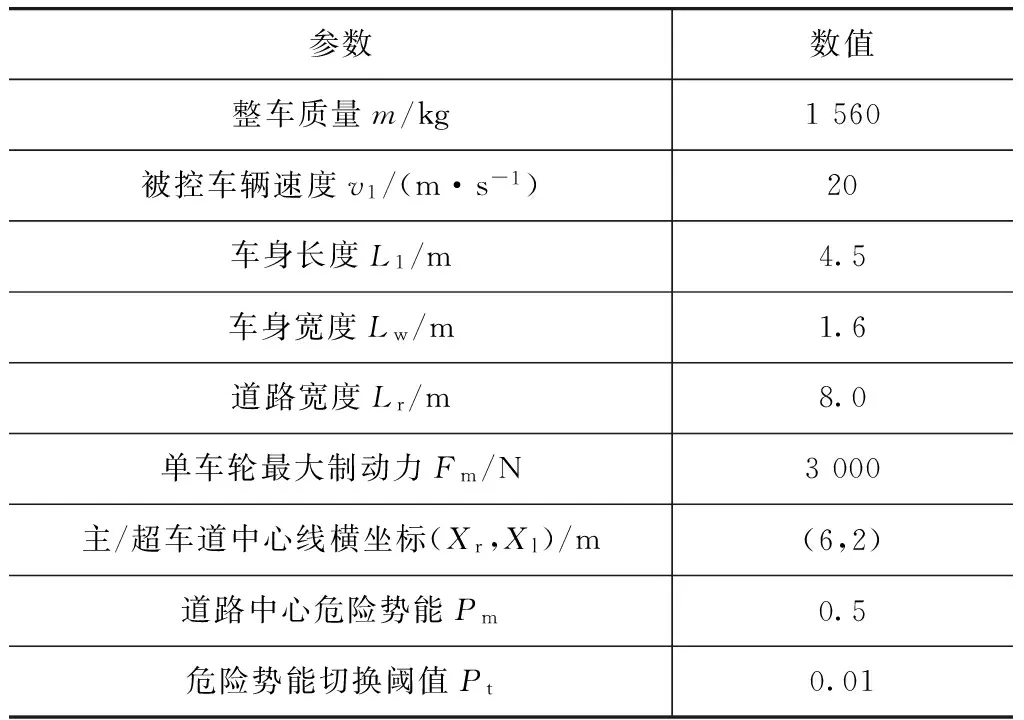
表1 主动避撞仿真参数
将道路障碍车辆的运动状况分为恒速运动(包括静止)和变速运动两类并分别对其进行仿真分析。
3.1 恒速障碍物工况
假设初始工况下,障碍车辆以恒定速度(0,10和15m/s)在被控车辆前方运动(或静止),根据障碍车辆当前的位置和速度信息,构建相应的三维虚拟危险势能场,并实时搜索和规划出主动避撞路径,如图11所示。
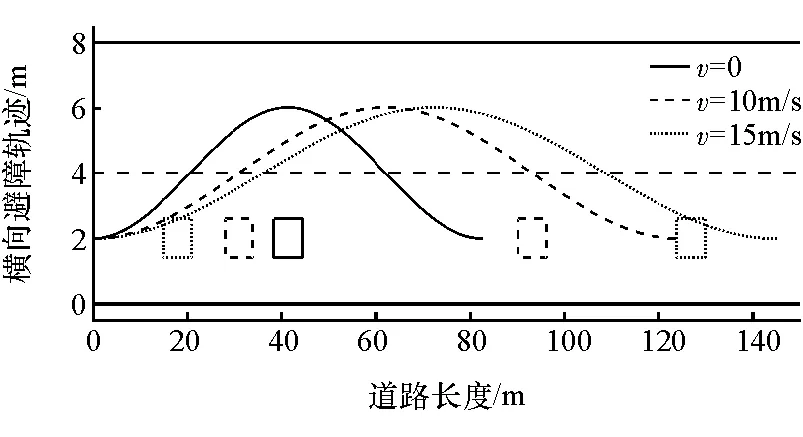
图11 恒速障碍车辆工况下的主动避撞路径
由图可见,针对不同速度的障碍车辆,利用三维虚拟危险势能场均可规划出相对平滑的避撞路径,满足道路车辆的运动学和动力学特性。
为验证被控车辆对避撞路径的跟踪性能,选取障碍车辆速度为10m/s的工况进行路径跟踪仿真分析,结果如图12所示。
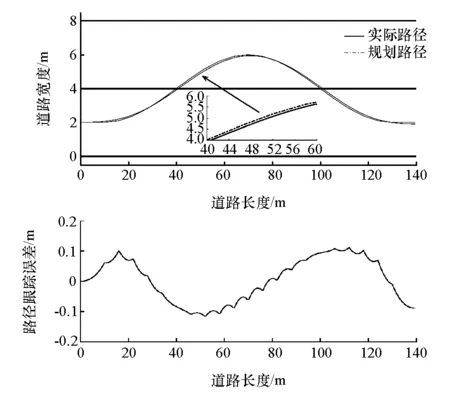
图12 10m/s工况下的路径跟踪特性及跟踪误差
由图可见,车辆的实际行驶路径与主动避撞规划路径之间的最大横向跟踪误差为0.115m,说明当被控车辆的速度为20m/s时,被控车辆能够达到较好的跟踪性能,也证明获得的避撞路径能够满足实际道路工况要求。
图13为10km/h时速下的车辆主动避撞特性。由图可见,在整个主动避撞路径跟踪过程中,当被控车辆与障碍车辆平行运动时,两车质心之间的间距(3.935m)最小,并大于两车的横向尺寸半径之和(1.6m),不会发生碰撞;而被控车辆与左右两侧道路路沿之间的最小间距分别为2m,同样大于车辆的横向尺寸半径(0.8m),证明被控车辆在有效跟踪避撞路径的前提下,不会与两侧路沿发生碰撞,具有较好的主动避撞性能。

图13 10m/s工况下的车辆主动避撞特性
3.2 变速障碍物工况

图14 障碍车辆速度变化曲线
当障碍车辆以图14中实线所示的速度在被控车辆(v1=20m/s)前方行驶时,随着障碍车辆的速度变化和被控车辆与障碍车辆之间的相对运动状态变化,构建的三维虚拟危险势能场函数也会随之发生实时改变。根据被控车辆在当前时刻三维虚拟危险势能场中所处的位置,通过上节所述的实时路径规划,可确定出下一时刻的主动避撞路径,如图15中虚线所示。

图15 主动避撞路径跟踪及跟踪误差
同样,在Carsim仿真环境下,采用成熟的最优驾驶员模型对变速障碍车辆工况下的主动避撞路径进行跟踪,仿真结果如图15和图16所示。从图15可以看出,被控车辆对避撞路径的最大跟踪误差为0.21m,发生在前方障碍车辆加速度突然发生改变的时刻,尽管该时刻的跟踪误差相对较大,但依然较好地兼顾了被控车辆的路径跟踪性能和动力学特性。
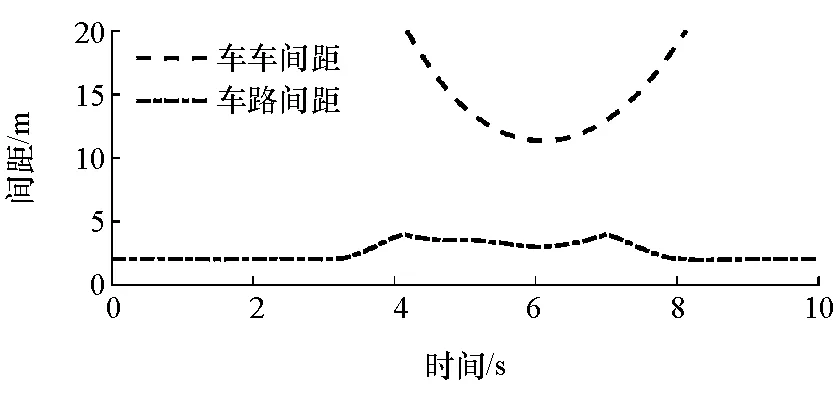
图16 变速障碍物工况下主动避撞特性
另外,在整个主动避撞仿真过程中,被控车辆质心与障碍车辆质心之间的最小间距为11.4m,远大于两个车辆的最大结构半径之和;而被控车辆与道路左、右两侧路沿的最小间距为2m,也大于被控车辆的最大横向结构半径0.8m。因此,仿真结果证明,在障碍车辆速度发生变化时,根据三维虚拟危险势能场得到的避撞路径依然能够保证被控车辆的主动避撞性能。
4 结论
(1) 受人工势场理论和弹性力场理论的启发,利用三角函数和指数函数构建的道路行驶三维虚拟危险势能场能准确、全面地反映车路一体化危险行驶状态。
(2) 依据提出的道路车辆三维危险势能场理论,设计了主动避撞系统的实时路径规划方法,并在恒速及变速障碍物工况下进行了仿真研究,仿真结果证明了该方法具有较好的主动避撞性能及路径跟踪性能。
(3) 本文中仅对平直车道上存在单个障碍物的道路工况进行了研究。在今后工作中,应充分考虑道路曲率变化和多障碍物工况对车辆主动避撞系统性能产生的影响,构建适用于更复杂道路工况的三维虚拟危险势能场。
[1] 宋晓琳,冯广刚,杨济匡.汽车主动避撞系统的发展现状及趋势[J].汽车工程,2008,30(4):285-290.
[2] STERLING J A, STEVEN C P, TOM E P, et al. An optimal-control-based framework for trajectory planning, threat assessment, and semi-autonomous control of passenger vehicles in hazard avoidance scenarios[J]. International Journal of Vehicle Autonomous Systems,2010,8(2):190-216.
[3] RYUZO H, JUZO I, PONGSATHRN R. Autonomous collision avoidance system by combined control of steering and braking using geometrically optimised vehicular trajectory[J]. Vehicle System Dynamics,2012,50(S1):151-168.
[4] 董红召,陈炜烽,郭明飞,等.基于车路一体化的车辆主动避撞系统关键技术的研究[J].汽车工程,2010,32(11):984-989.
[5] GUO L, GE P, YUE M, et al. Lane changing trajectory planning and tracking controller design for intelligent vehicle running on curved road[J]. Mathematical Problems in Engineering,2014,2014(8).
[6] ROSSETTER E J, GERDES J C. Lyapunov based performance guarantees for the potential field lane-keeping assistance system[J]. Journal of Dynamic Systems, Measurement, and Control,2005,128(3):510-522.
[7] CLAUDIU P, FRITZ T, RADU E P, et al. On the design of an obstacle avoiding trajectory: method and simulation[J]. Mathematics and Computers in Simulation,2009,79(7):2211-2226.
[8] 曹凯,周芦芦,张政新.基于道路势场的智能车辆机动驾驶控制算法[J].系统仿真学报,2011,23(10):2206-2210.
[9] SONG X L, CAO H T, HUANG J. Vehicle path planning in various driving situations based on the elastic band theory for highway collision avoidance[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2013,227(12):1706-1722.
[10] 肖浩,宋晓琳,曹昊天.基于危险斥力场的自动驾驶汽车主动避撞局部路径规划[J].工程设计学报,2012,19(5):379-383.
[11] 修彩靖,陈慧.基于改进人工势场法的无人驾驶车辆局部路径规划的研究[J].汽车工程,2013,35(9):808-811.
Design of 3D Virtual Dangerous Potential Fieldfor Vehicle Active Collision Avoidance
Ji Jie1,3, Ji Peng2,3, Peng He1& Li Yunwu1
1.CollegeofEngineeringandTechnology,SouthwestUniversity,Chongqing400715;2.EquipmentManufacturingCollege,HebeiUniversityofEngineering,Handan056038;3.TheWaterlooCentreforAutomotiveResearch(WatCAR),OntarioN2L3G1,Canada
In order to accurately and comprehensively reflect the vehicle-road integrated dangerous driving conditions for effectively reducing the incidence of road traffic accidents through active collision avoidance system, the 3D virtual dangerous potential fields for road and obstacles are constructed by trigonometric and exponential functions respectively for realizing the active collision avoidance of vehicle, and the key parameters of structure and their design bases are analyzed. Finally a simulation on the active collision avoidance of vehicle is conducted on roads and obstacles with both constant and varying speeds respectively. The results show that using the method proposed, the vehicle to be controlled can follow ideal path according to 3D virtual dangerous potential fields and realize the active collision avoidance of vehicle through path following.
vehicle; active collision avoidance; dangerous potential field; path following
*国家自然科学基金青年基金(61304189)、重庆市前沿与应用基础研究计划一般项目(cstc2015jcyjA60007)和中央高校基本业务费专项资金重点/双创项目(XDJK2015B028/XDJK2016E052)资助。
原稿收到日期为2014年11月14日,修改稿收到日期为2015年11月20日。
