基于UIO/双KF的4WID-EV驱动轮纵向力估计*
2016-04-11徐兴,陈特,陈龙,蒋侃
徐 兴,陈 特,陈 龙,蒋 侃
(1.江苏大学汽车与交通工程学院,镇江 212013; 2.江苏大学汽车工程研究院,镇江 212013)
2016171
基于UIO/双KF的4WID-EV驱动轮纵向力估计*
徐 兴1,2,陈 特1,陈 龙1,2,蒋 侃1
(1.江苏大学汽车与交通工程学院,镇江 212013; 2.江苏大学汽车工程研究院,镇江 212013)
四轮独立驱动电动汽车(4WID-EV)能独立实现4个轮胎纵向力的控制与分配,实时保证电动汽车的最佳运行状态。基于单个驱动轮的动力学和轮毂电机特性建立了驱动轮模型,采用电流、电压、转速等常用参数设计轮胎纵向力估计模型。考虑系统结构参数的不确定性和传感器噪声干扰,将驱动轮纵向力估计与干扰分离,基于卡尔曼滤波算法,设计了驱动轮纵向力-未知输入观测器。仿真和台架道路模拟试验结果表明,设计的观测系统能实时估计驱动轮纵向力,且具有较高的估计精度和抗干扰性,能满足四轮独立驱动电动汽车动力学控制要求。
四轮独立驱动电动汽车;轮胎纵向力估计;未知输入观测器;卡尔曼滤波器
前言
随着汽车工业的发展,人们对汽车主动安全性和乘坐舒适性的要求越来越高。近年来,许多先进的电控系统,如电子稳定系统ESP、防抱死制动系统ABS、牵引力控制系统TCS和驱动防滑系统ASR等[1],在车辆上得到了广泛应用。在这些电控系统中,汽车轮胎纵向力信号是闭环反馈控制的必要条件之一[2]。然而,轮胎纵向力难以直接测量,一般需要借助昂贵的传感器。目前,利用车辆模型和车载传感器信息对轮胎纵向力进行估计的方法已有许多的研究成果。常见的轮胎纵向力估计方法包括卡尔曼滤波法[2-4]、最优估计法[5]、非线性观测器[6-8]和滑模观测器(sliding mode observer, SMO)[9-10]等。
采用未知输入观测器UIO消除系统干扰是控制系统估计的一种新方法,具有结构简单、鲁棒性强等优点,但在车辆状态估计方面应用较少。文献[11]中针对同时具有未知输入和可测噪声的线性系统,在不满足观测器匹配条件的情形下,设计的降维观测能够实现状态、可测噪声和未知输入的同时重构。文献[12]中针对一类同时具有未知输入和输出可测噪声的Lipschitz非线性系统,也研究了状态估计、未知输入和可测噪声重构的问题。因此,传统观测器往往只应用于控制系统的反馈环节中,而未知输入观测器在动态系统的故障检测和混沌系统的同步保密通信等领域都获得了重要应用[13-15]。
汽车轮胎纵向力是车辆综合控制不可缺少的状态信息,大多数研究主要针对于传统汽车[2-4,7-9,16],这依赖于复杂的轮胎模型或整车动力学模型,且对观测器的输入要求较为严格。例如,文献[8]中提出的轮胎纵向力观测器需要的传感器测量信息包括发动机转矩和转速、轮缸压力和车轮角速度。文献[16]中设计的滑模观测器需要的输入包括车身侧向、纵向加速度、横摆角速度和4个车轮的轮速。从当前研究进展看,即便是针对电动汽车的纵向力估计研究,也依然是仅根据车轮的动力学关系,并未考虑轮毂电机模型,无法充分利用轮毂电机的电流、转速和电压等变量之间的关系[17-18]。
因此,基于电驱动轮模型的轮胎纵向力估计仍有很大的研究空间。四轮独立驱动电动汽车中轮毂电机既是汽车信息单元,又是控制执行单元[19-20],驱动电机的电流、电压和转速都能通过相应的传感器直接测量[21]。因此,本文中基于4WID-EV的电驱动轮数学模型,同时考虑系统含有噪声的情况,通过降阶的方式解耦未知输入,并利用双卡尔曼滤波器抑制噪声的影响,进而提出基于UIO的驱动轮纵向力观测器(driving wheel longitudinal force observer, DFO)设计,为四轮独立驱动电动汽车协调控制提供瞬时状态信息。
1 电驱动轮模型
图1为4WID电动汽车的驱动轮(包括轮毂电机和车轮),其动力学方程可表示为
(1)
式中:J1为车轮转动惯量;ω为车轮角速度;r为车轮有效半径;Fd为驱动轮纵向力;TL为轮毂电机的负载力矩。文献[21]中根据式(1)对ω进行微分来估计驱动轮纵向力,但该方法对噪声也进行了微分,导致估计精度不足。
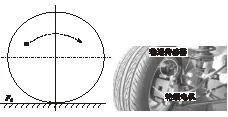
图1 4WID-EV驱动轮
四轮独立驱动电动汽车轮毂电机的电压和电流都能直接测得,可通过轮毂电机输出轴上的转矩平衡方程建立轮胎纵向力与电压、电流的联系。电机输出轴上的转矩平衡方程式为
(2)
轮毂电机等效电路的动态电压平衡方程为
(3)
式中:J2为电机转子的转动惯量;b为阻尼系数;Kt为电机转矩常数;i为线电流;u为线电压;R为绕组等效线电阻;L为绕组等效电感;Ka为反电动势系数。
由式(1)~式(3)可得
(4)
(5)
其中J=J1+J2
汽车行驶时,振动和发热等难以避免的干扰都会产生过程噪声和传感器测量噪声,影响估计精度。实际行驶时噪声比较复杂,难以对噪声进行建模,仿真时采用高斯白噪声来表示模型的噪声输入。假设状态向量x=[i ω]T,u为已知输入(母线电压),未知输入d为驱动轮纵向力,y为传感器测量值,w和v为互不相关的零均值白噪声序列,则电驱动轮模型的状态方程为

(6)
y=Cx+Fv
(7)
2 驱动轮纵向力观测器(DFO)设计
2.1 电驱动轮模型的系统解耦
以驱动轮纵向力作为系统的未知输入量,通过未知输入量与噪声干扰解耦,实现驱动系统的降阶。依据式(6)和式(7)驱动轮模型,存在rank(CD)=rank(D),它满足观测器匹配条件。这里,构建一个非奇异矩阵:
(8)
则式(6)和式(7)电驱动轮模型的状态空间方程可转化为

(9)
(10)

(11)
含驱动轮纵向力的部分为
(12)
输出方程为

(13)
2.2 基于双KF的电驱动轮模型状态观测器设计
(14)
(15)
由式(11)和式(14)两式可得解耦后子系统的状态方程为
(16)

同理,由式(11)和式(14)可得另一子系统的状态方程为
(17)

此时两子系统中均不含驱动轮纵向力。

(18)
2.3 基于UIO的驱动轮纵向力观测器设计
由式(14)和式(16)分别可得
(19)
(20)
再由式(12)、式(19)和式(20)可推导出未知输入观测器方程为
(21)
其中:
由式(21)可知,利用系统状态观测值和测量电压可估计出驱动轮纵向力。驱动轮纵向力观测器系统如图2所示。
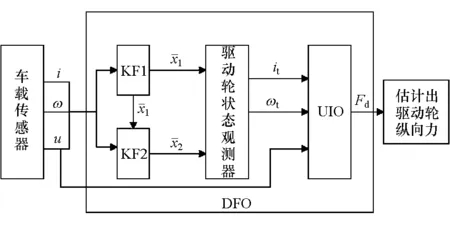
图2 驱动轮纵向力观测器
2.4 仿真验证
轮毂电机和车辆参数为:R=0.688Ω;Ka=0.06N·m/A;Kt=11.43N·m/A;J=7.143kg·m2;b=0.643N·m·s/rad;L=0.125H;r=0.25m。采用MATLAB/Simulink搭建系统仿真模型。
仿真时,驱动轮模型输入电压u=50V,未知输入选用一组确定加速踏板行程下驱动轮纵向力经验数据,过程噪声和测量噪声通过Simulink库中随机白噪声模块来模拟。图3~图5分别为采用两种观测方法估计的系统电流、转速和纵向力。由图可见,与常规的UIO方法相比,本文中提出的UIO/双KF综合方法具有更高的跟踪精度,且波动较小、抗干扰强,能较快地收敛。
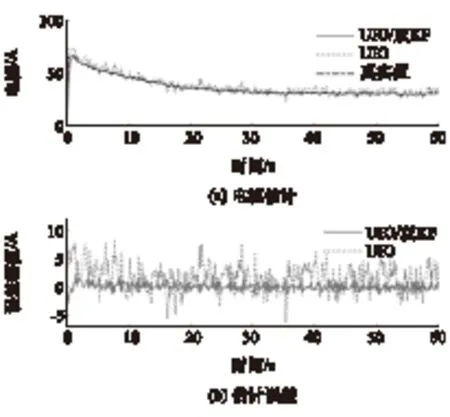
图3 两种观测算法对电流的估计仿真
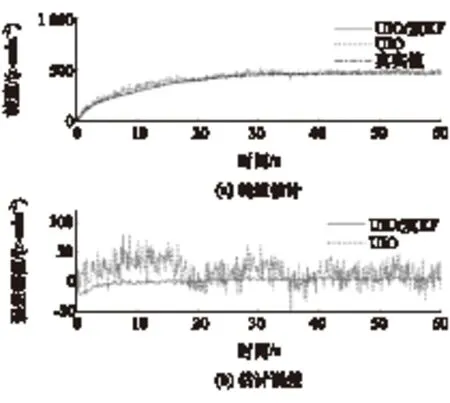
图4 两种观测算法对转速的估计仿真
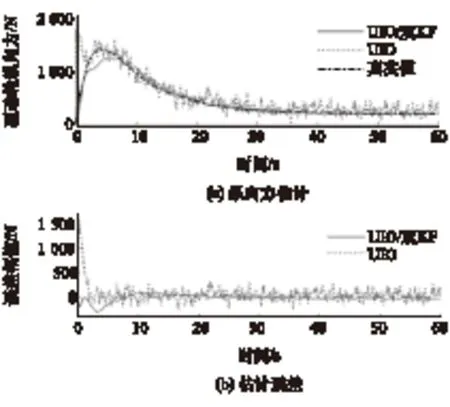
图5 两种观测算法对驱动轮纵向力的估计仿真
3 道路模拟台架试验验证与分析
本文中4WID-EV试验样车是在某款纯电动汽车架构上改装的,由4个BLDC轮毂电机独立驱动,且每个轮毂电机各由一个电机控制器控制。利用1个电压传感器器和4个电流传感器可分别测量电机控制器的电压和电流,轮毂电机处安装有齿轮轮速传感器,用于测量车轮转速。试验样车控制系统如图6所示。
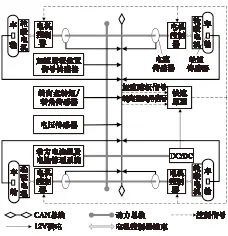
图6 4WID-EV控制系统结构
底盘测功机道路模拟试验系统如图7所示。试验时,基于快速原型实现对整车的控制,加速踏板处于固定位置,且实时变化的电流、电压和转速作为DFO的输入,同时底盘测功机系统采集驱动轮纵向力的真实值。
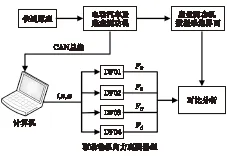
图7 道路模拟试验系统
图8和图9分别为两种观测器估计的电流、转速和其它试验测量数据。由图可见,与仿真对比,台架试验数据的电流、转速估计响应速度略慢,这是由于实际获得传感器数据及台架系统干扰等不确定因素的影响,但从误差分析看,设计的观测器能满足系统要求。
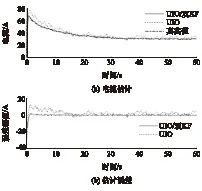
图8 两种观测算法对电流的估计试验
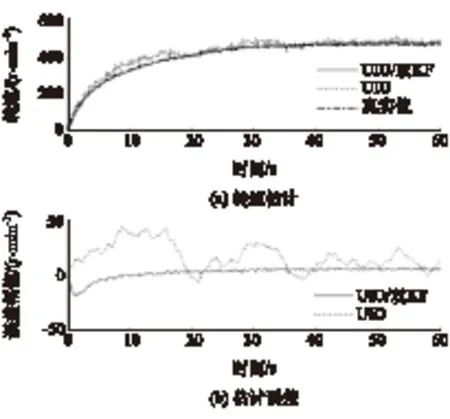
图9 两种观测算法对转速的估计试验
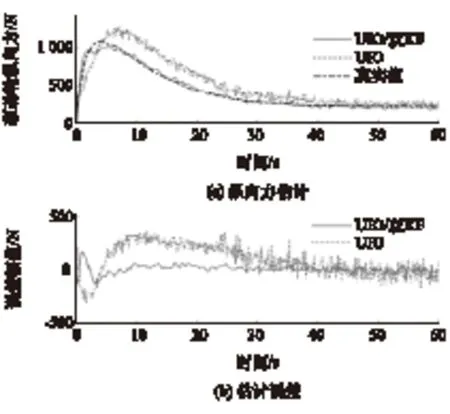
图10 两种观测算法对驱动轮纵向力的估计试验
图10为两种观测器的估计值与试验测量值的对比。从图10(a)中可以看出,本文中设计的观测器估计精度更好,且常规UIO估计的纵向力达到峰值和趋于平稳的时间都存在一定的滞后。图10(b)中设计观测器的估计误差更快地趋于平稳且波动小。
表1为两种观测器下电流、转速和纵向力估计误差的均值和方差。由表可见,设计的观测器估计误差的均值和方差都优于常规UIO方法,且估计误差在合理范围内,表明设计的UIO/双KF观测系统具有较高精度和较优的抗干扰性。
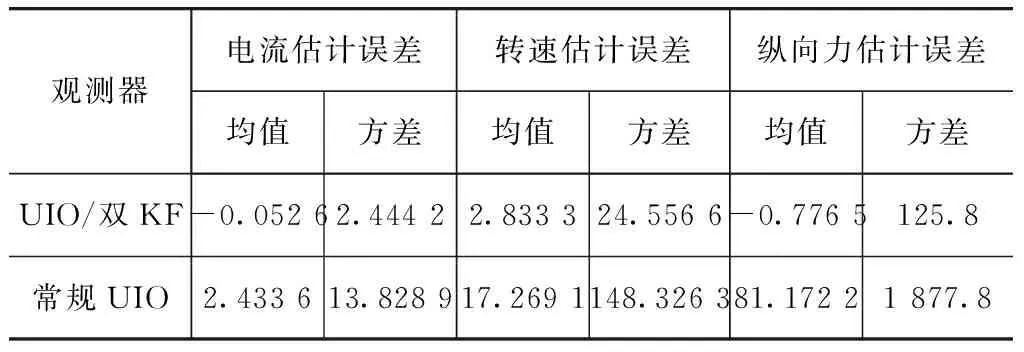
表1 估计误差对比
4 结论
(1) 利用四轮独立驱动电动汽车轮毂电机的电压、电流和转速等信息易获取的特点,提出了基于电驱动轮模型的驱动轮纵向力估计方案。
(2) 结合双KF设计了驱动轮纵向力观测器,通过模型解耦有效地分离了噪声干扰与未知输入,提高了系统状态和纵向力估计的鲁棒性。
(3) 仿真和台架试验表明,提出的驱动轮纵向力观测器能实时估计电动汽车的行驶状态,具有较高的估计精度和抗干扰性,为驱动力的协调控制与分配提供依据。
[1] KANG M, LI L, LI H, et al. Coordinated vehicle traction control based on engine torque and brake pressure under complicated road conditions[J]. Vehicle System Dynamics,2012,50(9):1473-1494.
[2] CHO W, YOON J, YIM S, et al. Estimation of tire forces for application to vehicle stability control[J]. IEEE Transactions on Vehicular Technology,2010,59(2):638-649.
[3] BAFFER G, CHARARA A, LECHNER D, et al. Experimental evaluation of observers for tire-road force, sideslip angle and wheel cornering stiffness [J]. Vehicle System Dynamics, 2008, 46(6): 501-520.
[4] DAKHLALLAH J, GLASER S, MAMMAR S, et al. Tire-road forces estimation using extended Kalman filter and sideslip angle evaluation[C]. Proceedings of IEEE American Control Conference. Piscataway, NJ, USA: IEEE,2008:4597-4602.
[5] RAJAMANI R, PIYABONGKARN D, LEW J Y. Tire-road friction coefficient estimation[J]. IEEE Control System Magazine,2010,30(4):54-69.
[6] LI L, WANG F L, SHAN G, et al. Design of tire fault observer based onestimastion of tire/road friction conditions[J]. Automatica Sinica,2003,29(5):695-702.
[7] ACARMAN T. Observation of vehicle states by using steering wheel angle and wheel angular speeds[C]. IEEE International Conference on Vehicular Electronics and Safety. Columbus: IEEE,2008:189-194.
[8] 杨斯琦,解小华,陈虹.一种新型的轮胎力级联估计方法[J]. 信息与控制,2015,44(2): 203-214.
[9] BAFFET G, CHARARA A, LECHNER D. Experimental evaluation of a sliding mode observer for tire-road forces and an extended Kalman filter for vehicle sideslip angle[C]. IEEE Conference on Decision and Control,2007:3877-3882.
[10] ALFARO V M, VILANOVA R. Robust tuning of 2DoF five-parameter PID controllers for inverse response controlled processes[J]. Journal of Process Control,2013,23(4):453-462.
[11] YANG J Q, ZHU F L, SUN X J. State estimation and simultaneous unknown input and measurement noise reconstruction based on associated observers[J]. International Journal of Adaptive Control and Signal Processing,2013,27(10):846-858.
[12] 杨俊起,朱芳来.未知输入和可测噪声重构之线性矩阵不等式非线性系统观测器设计[J].控制理论与应用,2014,31(4):538-544.
[13] ZHU F L, CEN F. Full-order observer-based actuator fault detection and reduced-order fault reconstruction for a class of uncertain nonlinear systems[J]. Journal of Process Control,2010,20(10):1141-1149.
[14] ZAREI J, POSHTAN J. Sensor fault detection and diagnosis of a process using unknown input observer[J]. Mathematical and Computational Applications,2011,16(1):31-42.
[15] 胡志坤,孙岩,姜斌,等.一种基于最优未知输入观测器的故障诊断方法[J].自动化学报,2013,39(4):1225-1230.
[16] 赵海燕,陈虹,苏海涛,等.基于滑模观测器的汽车轮胎力估计[C]. Proceedings of the 27th Chinese Control Conference. Kunming, Yunnan, China,2008:691-695.
[17] 林程,王刚,曹万科,等.基于LO-EKF算法的分布驱动电动汽车状态估计的研究[J].汽车工程,2014,36(11):1316-1320.
[18] MAEDA Kenta, FUJIMOTO Horishi, HORI Yoichi. Four-wheel driving-force distribution method based on driving stiffness and slip ratio estimation for electric vehicle with in-wheel motors[C]. IEEE Vehicle Power and Propulsion Conference. Seoul, Korea,2012:1286-1291.
[19] 褚文博,罗禹贡,赵峰,等.分布式驱动电动汽车驱动转矩协调控制[J].汽车工程,2012,34(3):185-196.
[20] 余卓平,冯源,熊璐.分布式驱动电动汽车动力学控制发展现状综述[J].机械工程学报,2013,49(8):105-114.
[21] HORI Y. Future vehicle driven by electricity and control-research on four-wheel-motored “UOT electric march II”[J]. IEEE Transactions on Industrial Electronics,2004,51(5):954-962.
Longitudinal Force Estimation of Driving Wheels in 4WID-EV Based onUnknown Input Observer and Dual Kalman Filters
Xu Xing1,2, Chen Te1, Chen Long1,2& Jiang Kan1
1.SchoolofAutomotiveandTrafficEngineering,JiangsuUniversity,Zhenjiang212013;2.AutomotiveEngineeringResearchInstitute,JiangsuUniversity,Zhenjiang212013
Four wheel independent drive electric vehicle (4WID-EV) can independently realize the control and distribution of four tire longitudinal forces and ensure the best operation state of EV in real time. Based on the dynamics of single driving wheel and the characteristics of hub motor, a model for driving wheel is built, and an estimation model for the longitudinal forces of tires is designed by using conventional parameters such as current, voltage and rotational speed. With consideration of the uncertainty of system structure parameters and the noise disturbance of sensor, the longitudinal force estimation of driving wheel is separated from disturbance, and an unknown-input observer for the longitudinal forces of driving wheel is designed based on Kalman filter algorithm. The results of simulation and bench test show that the observation system designed can well estimate the longitudinal force of driving wheel in real time with better estimation accuracy and disturbance resistance, meeting the requirements of dynamics control for 4WID-EV.
4WID-EV; tire longitudinal force estimation; unknown input observer; Kalman filter
*江苏省“六大人才高峰”项目(2014-JXQC-004)、中国博士后科学基金(2015M571680)和江苏省普通高校研究生科研创新计划(CXLX13_677)资助。
原稿收到日期为2016年1月12日,修改稿收到日期为2016年3月11日。
