AMT自动离合器的变论域模糊控制*
2016-04-11姜建满赵晓敏
姜建满,赵 韩,赵晓敏
(合肥工业大学机械与汽车工程学院,合肥 230009)
2016169
AMT自动离合器的变论域模糊控制*
姜建满,赵 韩,赵晓敏
(合肥工业大学机械与汽车工程学院,合肥 230009)
本文中针对AMT自动离合器的不确定性、非线性和时变性,采用基于模糊推理的变论域方法,为AMT自动离合器提出了变论域模糊控制策略,设计了不依赖于精确数学模型的双二维离合器模糊控制器。仿真和试验结果表明,与模糊逻辑控制相比,变论域模糊控制能有效地减小换挡冲击,降低离合器的磨损,提高换挡过程的平顺性。
AMT;自动离合器;变论域;模糊控制
前言
电控机械式自动变速器(AMT)是在传统手动变速器的基础上增加自动选换挡执行机构、自动离合器执行机构和变速器控制单元(TCU),以判断换挡时刻,驱动执行机构动作。离合器控制是AMT的关键技术之一,其控制性能的好坏直接影响车辆的换挡平顺性。由于离合器和驱动机构存在诸多的非线性、时变及外界干扰,传统的控制方法难以达到精确控制的要求。因此,必须寻找有效的离合器控制方法,以降低离合器控制过程中转矩超调和振荡带来的冲击等问题[1]。
针对AMT换挡过程中离合器的控制,近年来人们做了大量的研究,如自适应控制[2]、最优控制[3-4]等,然而这些控制方法大多建立在已知的系统精确数学模型基础之上。由于真实系统存在复杂性、非线性和时变性,往往很难获得精确的数学模型。因此不依赖精确数学模型的智能控制逐渐成为研究的热点。例如,文献[5]和文献[6]中将主观评价与客观数据相比较,利用模糊逻辑规则得出优化的离合器接合规则;文献[7]中利用灰色预测PID控制使控制系统的灰度得到一定程度的白化,解决了离合器控制的超调和振荡问题;文献[8]中采用动态滑模控制算法实现对离合器的有效控制,降低了常规滑模控制器的抖振现象。文献[9]中采用离合器滑差控制的方法,实现离合器接合和离合器分离之间的协调控制。
模糊控制不需要大量的学习数据,可以利用专家知识建立模糊规则库,具有较好的控制性能[10]。模糊控制能整合人类专家的语言信息来实现复杂系统的控制。然而,基于领域专家得到的控制规则总是有限的,在既定的规则下无法保障控制器的插值精度(或逼近精度)。要想达到指定的控制精度,势必要增加控制规则,这就增加了控制器的计算复杂性。因此模糊控制在控制精度和计算复杂性之间存在矛盾[11-13]。而变论域模糊控制的思想是在规则形式不变的前题下,论域随着误差变小而收缩(亦可随着误差增大而扩展),局部地看,论域收缩相当于增加规则,从而提高了精度。
本文中在模糊控制的基础上加入变论域思想,采用基于模糊推理的变论域方法,使伸缩因子随输入量的变化而变化,以便实现论域的自适应调节和解决控制器参数设置的难题。同时,考虑到控制器4个输入变量之间的耦合关系,将离合器的控制设计成4输入单输出的双二维模糊控制器,简化了解耦方法和控制器结构。通过仿真和试验,研究该方法的有效性,并与传统的模糊控制进行比较。
1 离合器控制目标与换挡过程
1.1 换挡品质的评价指标
(1) 换挡时间
换挡时间t是指从发出换挡指令开始至换入目标挡后离合器完全接合,完成整个换挡操纵的总时间。若要求换挡快捷,应减小t;反之若要求换挡平稳,则应适当延长t。
(2) 滑摩功
滑摩功W为离合器和同步器的摩擦力矩所作的功之和,分别记为Wclt和Wsyn。
式中:Tc(t)为离合器传递的转矩;ωe(t),ωc(t)和ωs(t)分别为发动机、离合器从动盘和同步器输出轴的角速度;igin为换入新挡时的目标传动比;tc为离合器接合时间(即离合器的滑摩时间);ts为同步器的同步时间。换挡过程中,应尽可能减小滑摩功,以减小离合器的磨损。
(3) 冲击度
冲击度j是评价换挡品质最重要的指标,一般用车辆纵向加速度的变化率来表示:
式中:v(t)为车辆行驶速度;a(t)为车辆加速度。换挡过程中应当使冲击度尽可能的小,以保证换挡过程的平稳性。
1.2 换挡过程分析
进行换挡过程的动力学分析,以便找出影响换挡品质的关键因素,AMT换挡过程可以分为3个阶段,图1为换挡过程的动力系统传递模型。
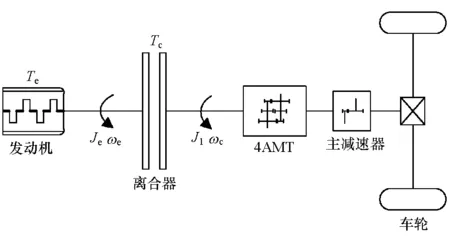
图1 动力系统传递模型
(1) 分离离合器阶段
当车辆以一定速度正常行驶时,离合器处于完全接合状态,动力源到车轮间的动力学关系是确定的,此阶段的冲击度为
式中:Je,J1和J2分别为发动机转动惯量、折合到离合器从动盘上的转动惯量和折合到变速器输出轴上的转动惯量;Te(t)为发动机的转矩;r为车轮滚动半径。此阶段的冲击度主要取决于动力源输出转矩的扰动情况,因此,应当在换挡前后平稳地加减动力转矩,以提高车辆行驶的平稳性。
当车辆需要换挡时,减小节气门开度并迅速分离离合器。分离时间由离合器操纵机构的执行速度决定,在此阶段中,车速可认为基本不变,而冲击度主要来自地面阻力矩的变化,也可认为几乎不变。
(2) 选换挡阶段
离合器完全分离后将变速器挡位退至空挡,接下来是同步器的同步阶段,此时,在同步器摩擦力矩的作用下,目标档位的主被动齿轮转速差开始减小,此阶段的冲击度为
式中:Fs(t)为作用在同步器啮合套上的轴向力(也叫换挡力),它与作用在变速杆手柄上的力成正比;μs为同步器锥面的摩擦因数;Rs为同步器锥面的平均半径;α为锥面角。
可见,挂挡过程产生的冲击主要取决于dFs(t)/dt,其值越大,即换挡越“粗暴”,则挂挡冲击越大。由于挂挡阶段离合器处于分离状态,且挂挡同步过程本身产生的冲击很小,因此挂挡阶段所产生的冲击对整车的行驶平稳性影响很小。真正影响车辆行驶平稳性的是离合器接合阶段所产生的冲击。
(3) 离合器接合阶段
换入新挡后,离合器开始接合,节气门开度增大,动力恢复传递。此过程的时间由离合器的接合速度决定。此阶段的冲击度为
离合器滑摩过程中,离合器的摩擦阻力矩Tc(t)变化越快,换挡冲击度越大。
换入新挡后,动力源动力输出端到车轮之间又恢复了确定的关系,之后的冲击度为
换挡结束后,冲击度的大小与动力源转矩的变化率成正比,因此,车辆在正常行驶过程中,要求油门踏板平稳变化,以提高车辆行驶的稳定性。
由以上分析可知,离合器接合过程中,若接合速度过快,离合器从动盘传递的转矩增长较快,引起车辆冲击度较大,但换挡时间较短,离合器接合过程中造成的能量传递损失少,滑摩功少;反之,若离合器接合过慢,离合器从动盘传递转矩的增长速度较慢,车辆的冲击度较小,但换挡时间较长,滑摩功较大,影响离合器的使用寿命。可见,离合器的冲击度和滑摩功是两个相互矛盾的指标,影响着整车的动力响应特性、驾驶舒适性、动力传递效率和离合器的使用寿命等。
由离合器传递转矩特性可知,Tc(t)与离合器的压紧力Fc(t)成正比,而Fc(t)与离合器行程Xc成正比,分析影响换挡平顺性的dTc(t)/dt∝dXc/dt,即分析换挡过程中离合器的接合速度vc可有效地优化换挡控制。由以上分析,本文采取“快-慢-快”的离合器接合控制。
2 变论域模糊控制设计
由于汽车行驶过程中的外界环境、驾驶员意图复杂多变,且发动机和离合器本身存在非线性、时滞、参数扰动等影响,用具有固定输入、输出论域的传统模糊控制方法,难以充分发挥模糊控制的效果。模糊控制的本质就是插值控制,采用变论域模糊控制时,虽然规则形式不变,论域收缩使得规则局部细化,相当于增加了模糊规则数目,即插值点加密,从而提高了控制精度。变论域模糊控制的输入、输出变量可根据行驶工况的改变进行适时调整,非常适用于离合器这类非线性系统。
基于以上变论域的思想,本文中采用基于函数模型的变论域方法,使伸缩因子随输入量的变化而变化,对离合器的接合过程进行变论域的模糊控制。油门开度及其变化率反映驾驶员的意图,离合器输入、输出轴的转速差反映离合器的接合过程,因而本文中的离合器变论域模糊控制器,选取油门开度α及其变化率dα/dt和离合器输入输出轴角速度差ωec及其变化率dωec/dt作为输入变量,输出变量选取离合器的接合速度vc。变论域模糊控制的离合器控制系统结构如图2所示。

图2 离合器变论域模糊控制系统结构
2.1 输入输出变量的模糊化
根据上述控制思想,将输入量α,dα/dt,ωec和dωec/dt及输出量vc模糊化为5个等级,模糊变量均为{NB,NS,ZE,PS,PB},对于vc,NB表示慢接合,NS表示较慢接合,ZE表示正常接合,PS表示较快接合,PB表示快接合。对于α,dα/dt,ωec和ωec而言,NB表示负大,NS表示负小,ZE表示零,PS表示正小,PB表示正大。对输入、输出变量其初始论域皆为[-4,4],都采用三角形隶属函数,输入变量的隶属函数如图3所示。
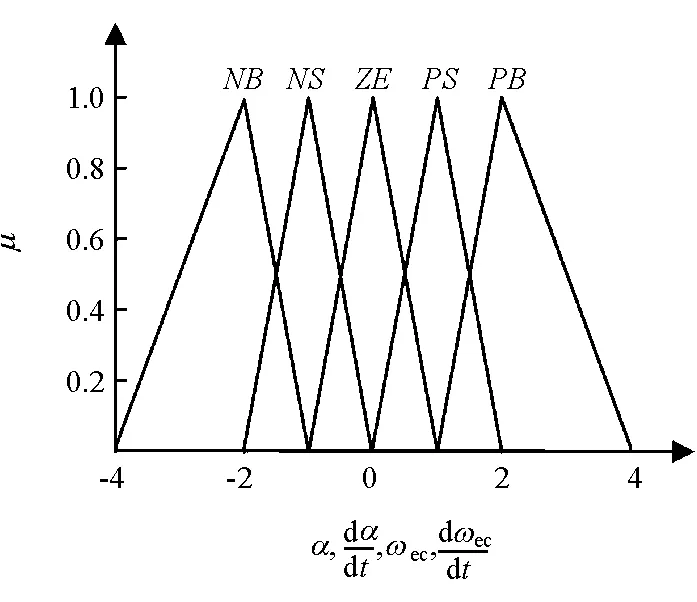
图3 输入变量隶属函数
2.2 基于模糊规则的伸缩因子
论域伸缩变化的数学模型有多种形式,但是难以找到精确的函数模型。论域的变化易于用语言的形式加以描述,故可在伸缩因子确定过程中采用模糊推理实现,这就避免了参数选择和模型不精确的困难。具体算法如下。
α1,α2,α3和α4分别为输入变量α,dα/dt,ωec和dωec/dt论域的伸缩因子,它们之间构成4个单输入单输出模糊控制器。β为输出论域的伸缩因子,它的取值应该由α,dα/dt,ωec和dωec/dt共同确定,即根据4个输入变量当前取值确定输出论域进行多大程度的扩大或缩小。由于输入变量较多,基于双二维模糊控制的思想,设计成4输入单输出的双二维模糊控制器,取α,dα/dt,ωec和dωec/dt作为输入变量,一次只用两个变量,即把输入变量进行分离。为方便后面的计算和转化,其初始论域皆为[0,1]。例如,当α和dα/dt均为“正大”,β应取“很大”以使输出论域扩大;当α为“正大”,dα/dt为“负小”时,表明系统与设定值之间的差距很大,但系统正以很快的速度靠近设定值,此时β应取“很小”使论域压缩。可总结成如下两条规则:如果α是NB且dα/dt是NB,则β为VB;如果α是NB且dα/dt是PB,则β为ZE。输入输出变量伸缩因子模糊控制器的控制规则分别见表1和表2。输入变量伸缩因子的隶属函数如图4(a)所示,输出变量伸缩因子的隶属函数如图4(b)所示。
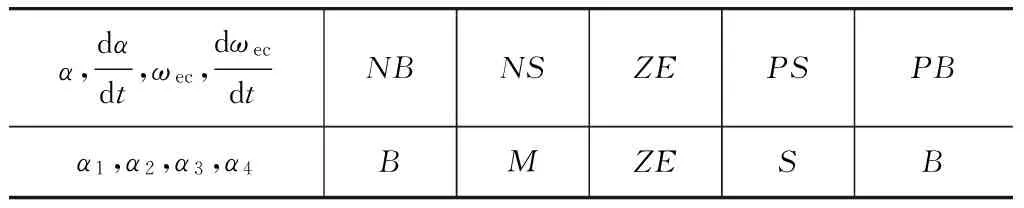
表1 输入变量伸缩因子的控制规则表
表2 输出变量伸缩因子的控制规则表
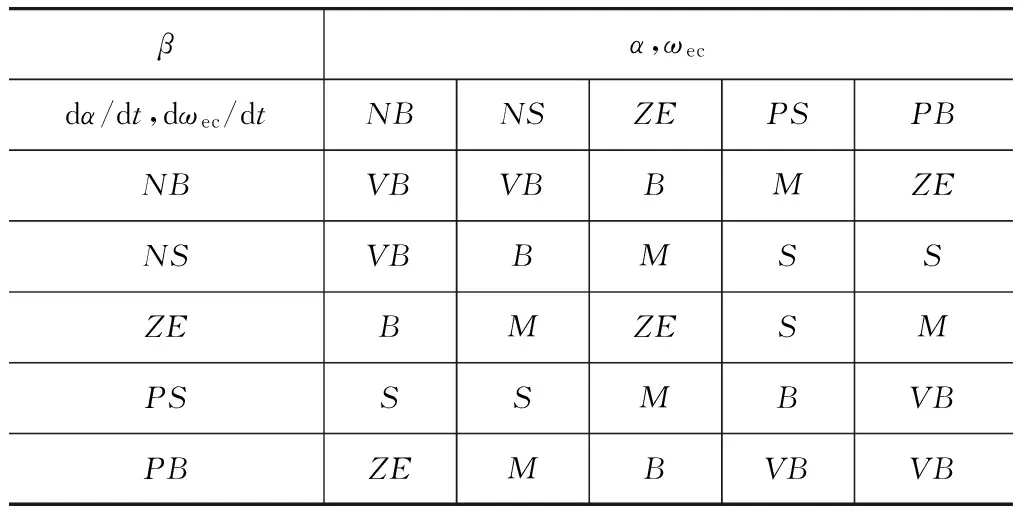
βα,ωecdα/dt,dωec/dtNBNSZEPSPBNBVBVBBMZENSVBBMSSZEBMZESMPSSSMBVBPBZEMBVBVB
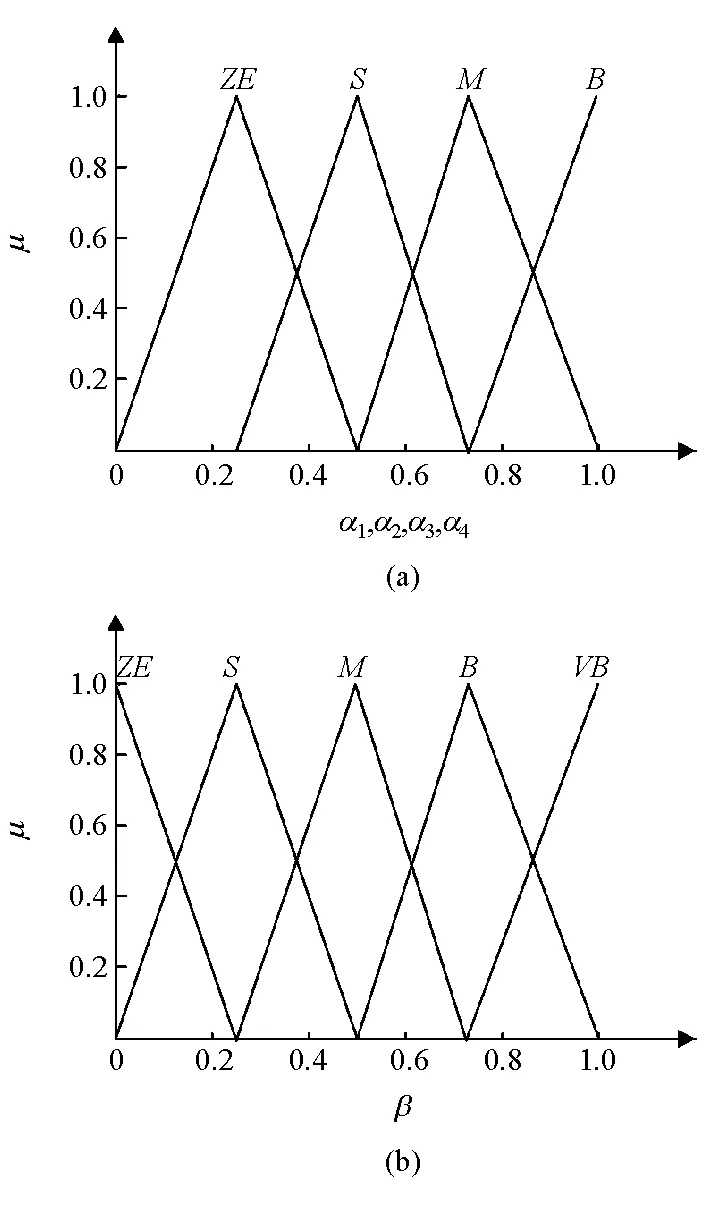
图4 输入、输出变量伸缩因子隶属函数
3 离合器控制仿真与试验
3.1 仿真
把所建立的发动机模型、传动系统模型、阻力矩模型、变论域离合器控制模型等按照输入、输出关系在Simulink中有机地连接起来即可建立整车的换挡模型,仿真设定的主要参数如表3所示。
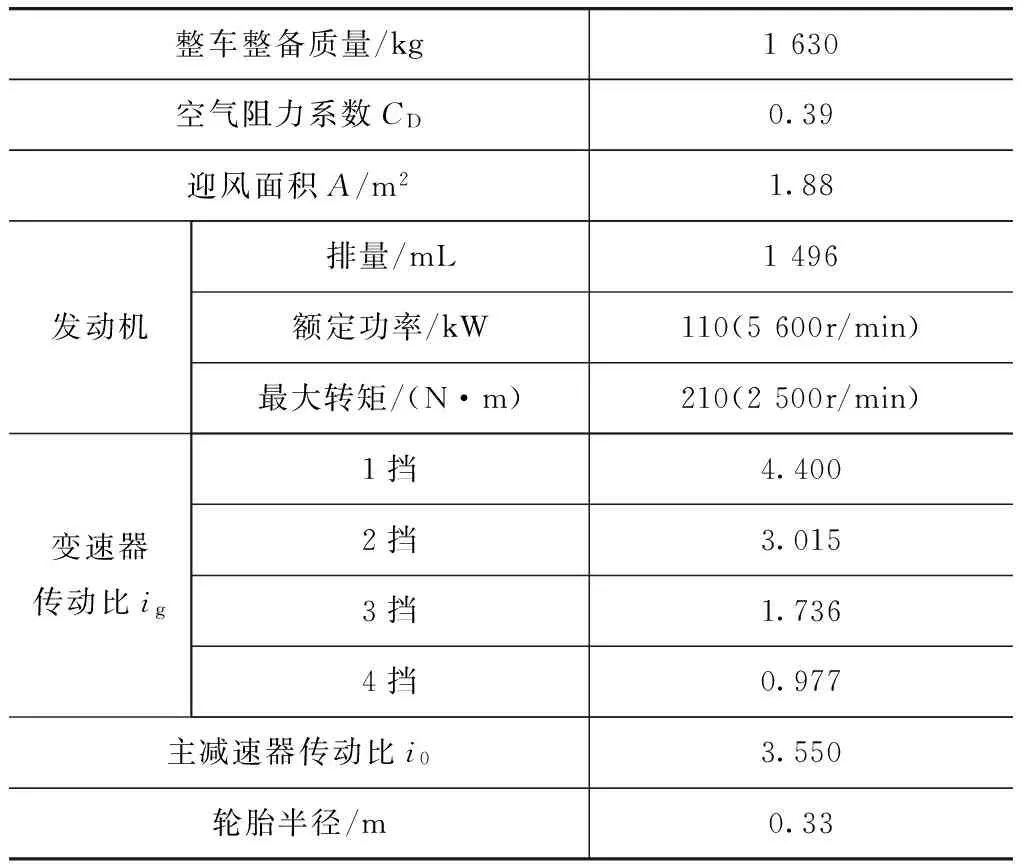
表3 仿真模型参数
油门开度的变化率反映驾驶员综合路况车况等因素后作出的判断,不同的油门开度体现不同的驾驶意图。表4为变论域模糊控制和文献[14]中提出的模糊逻辑控制下,不同油门开度变化率下相应的换挡品质评价指标对比。
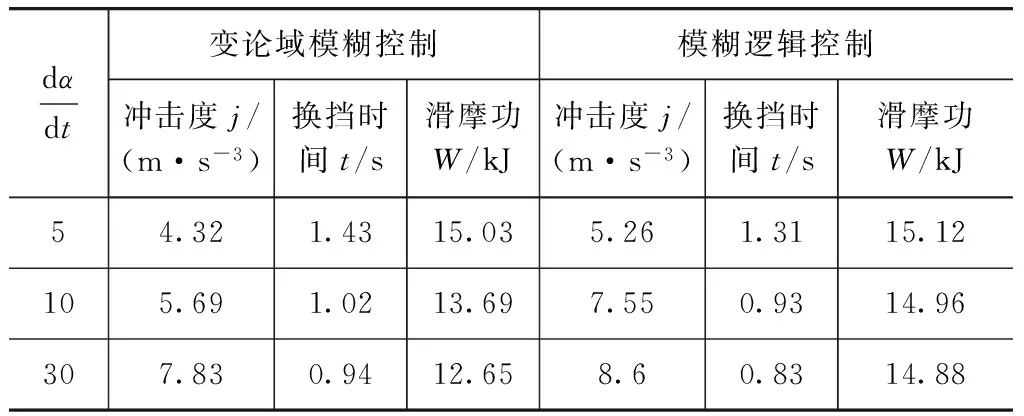
表4 不同控制下换挡品质比较
从表4可知,随着油门开度变化率的增大,驾驶员希望尽快地接合离合器,换挡时间和滑摩功都相应减小,冲击度变大,但都满足冲击j<10m·s-3的要求。以dα/dt取10为例,本文中所提出的变论域模糊控制和文献[14]中所提出的模糊逻辑控制相比,换挡时间从0.93s增长到1.02s,在换挡时间仅增长0.09s的前提下,冲击度从7.55m·s-3下降到5.69m·s-3,滑摩功从14.96kJ下降到13.69kJ。都有所下降。说明本文中提出的变论域模糊控制器设计是合理、有效的,跟原来的模糊逻辑控制相比提高了换挡品质。
3.2 试验
利用Real-time Workshop工具箱把控制策略软件生成C代码,并把C代码写入控制器单片机。选用ETAS测试系统对控制器效果进行测试。在平直沥青路面上对改进的AMT控制器车辆进行加速试验,考察控制器效果,图5为试验测试图,图6为2 挡升3挡的试验结果。由图可见,采用本文中提出的双层控制后,换挡品质大为提高,最大冲击度小于10m·s-3,滑摩功为13.68kJ,换挡平顺性较好,改善了AMT的换挡品质。
图5 实车试验图

图6 试验用车2-3挡升挡过程
4 结论
针对具有不确定性的AMT离合器控制系统的复杂性、非线性、时变性和强耦合性,本文中创新性地将变论域方法和模糊理论相结合,提出了自动离合器的变论域模糊控制,并设计出离合器的双二维模糊控制器。一方面避免了传统控制中精确模型不容易获得的难题,另一方面解决了传统模糊控制中论域难以选择的问题。针对试验用车,分别进行仿真及实车试验,结果表明,变论域的模糊控制更能有效地缩减离合器主、从动盘间的转速差,降低换挡过程中产生的滑摩功,减小冲击度,从而提高了换挡品质。
本文中所提出的变论域模糊控制能同时兼顾控制精度和计算复杂度,对具有不确定性的系统具有较好的控制效果,因此这种控制方法对复杂、时变、非线性的不确定系统具有很好的应用价值。
[1] GLIELMO L, IANNELLI L, VACCA V et al. Gearshift control for automated manual transmissions[J]. IEEE/ASME Transactions on Mechatronics,2006,11(1):17-26.
[2] 谢先平,王旭东,吴晓刚,等.车辆起步过程发动机恒转速自适应模糊控制研究[J].系统仿真学报,2008,20(16):4382-4386.
[3] 江发潮,陈全世,曹正清.机械式自动变速器的离合器优化控制[J].清华大学学报(自然科学版),2005,45(2):242-245.
[4] GLIELMO L, VASCA F. Optimal control of dry clutch engagement[C]. SAE Paper 2000-01-0837.
[5] FAN Yuezhen, WANG Qingchun, LU Dunmin, et al. Simulation of clutch engagement based on fuzzy logic[C]. 2010 International Conference on Intelligent Computation Technology and Automation, DOI 10.1109/ICICTA.2010:325-328.
[6] KONG Huifang, ZHANG Chongwei. A research of fuzzy technology on AMT vehicle clutches[C]. Sixth World Congress on Intelligent Control and Automation, Dalian, China,2006:21-23.
[7] 余天明,郑磊,李颂.电控机械式自动变速器离合器灰色预测PID控制技术[J].农业机械学报,2011,42(8):1-6.
[8] 赵永胜,刘志峰,杨文通,等.汽车自动离合的动态滑模控制[J].汽车工程,2009,31(6):536-539.
[9] 戴振坤,徐向阳,刘艳芳,等.液力自动变速器离合器的闭环滑差控制[J].汽车工程,2012,34(8):718-722.
[10] 李洪兴,苗志宏,王加银.非线性系统的变论域稳定自适应模糊控制[J].中国科学[E辑],2002,32(2):65-75.
[11] LI Liangfeng, LIU Xiaoyun, CHEN Wufan. A variable universe fuzzy control algorithm based on fuzzy neural network[C]. 7th World Congress on Intelligent Control and Automation, Chongqing, China,2008:4352-4356.
[12] 郭海刚.变论域自适应模糊控制的几种新方法[D].大连:大连理工大学,2013.
[13] 李洪兴.变论域自适应模糊控制器[J].中国科学[E辑],1999,29(1):32-42.
[14] QU Jinyu, ZHANG Yirui. Control of clutch engagement for AMT based on fuzzy logic[C]. Third International Symposium on Information Science and Engineering, ShangHai, China,2010:47-50.
Variable Universe Fuzzy Control of Automatic Clutch in AMT
Jiang Jianman, Zhao Han & Zhao Xiaomin
SchoolofMechanicalandVehicleEngineering,HefeiUniversityofTechnology,Hefei230009
In view of the uncertainty, nonlinearity and time dependence of automatic clutch in automated mechanical transmission (AMT), a variable universe method based on fuzzy reasoning is adopted, a variable universe fuzzy control strategy for the automatic clutch in AMT is proposed, and a double two-dimensional fuzzy controller, independent of precise mathematical model, for automatic clutch is designed in this paper. The results of both simulation and tests show that compared with fuzzy logic control, the fuzzy control with variable universe can effectively reduce shift impact, lower clutch wear, and enhance the smoothness of shifting process.
AMT; automatic clutch; variable universe; fuzzy control
*国家科技支撑计划项目(2009BGA12B03)资助。
原稿收到日期为2015年3月11日,修改稿收到日期为2015年11月22日。
