重载发射平台液压缸回收失控仿真分析及对策
2016-04-10李玉顺路世奇徐云辉吕明亮
李玉顺,路世奇,徐云辉,吕明亮
(北京航天技术发射研究所,北京,100076)
重载发射平台液压缸回收失控仿真分析及对策
李玉顺,路世奇,徐云辉,吕明亮
(北京航天技术发射研究所,北京,100076)
重载发射平台在支撑液压缸下降或进行调平时,会出现发射平台下降或调平过冲的情况,对发射平台操作的安全性和调平功能带来不利影响,严重影响了应用系统的正常运行。通过对重载平台支撑液压缸下降或调平过冲进行仿真分析,提出在重载情况下解决支撑下降或调平过冲的对策及参数控制方法,对后续系统设计具有指导意义。
重载平台;支撑液压缸;过冲分析
0 引 言
由于工作需要,重载发射平台(以下简称重载平台)在各支撑液压缸起伸到规定高度后需要调平。某重载平台由4个液压缸前后左右进行支撑,伸出支撑后车辆轮胎离地,平台重量全部由支撑液压缸承担,一般规定回收约100~200 mm后支撑载荷全部转移到轮胎上,支撑液压缸不再承受载荷[1]。为实现该重载平台的前后调平,手动控制该平台的前、后支撑液压缸同时起升,当各支撑液压缸起升到高度位移传感器H1检测的高度后,4个支撑液压缸停止外伸,根据调平检测设备的调平信号在电控模式下点动控制2个前支撑液压缸同时下降时(前支撑液压回路原理见图1,左右2个液压缸载荷及工况一致,YA2得电油缸无杆腔通压力油,油缸活塞杆伸出,重载平台起升;YA1得电,液压缸有杆腔通压力油,油缸活塞杆回收,重载平台下降),在不同的路面及载荷环境下会出现重载平台失速下降的情况,即使电磁阀YA1断电也无法停止(即出现电磁阀无法关断的情况),当轮胎着地后电磁阀才可正常关断,失速消除。
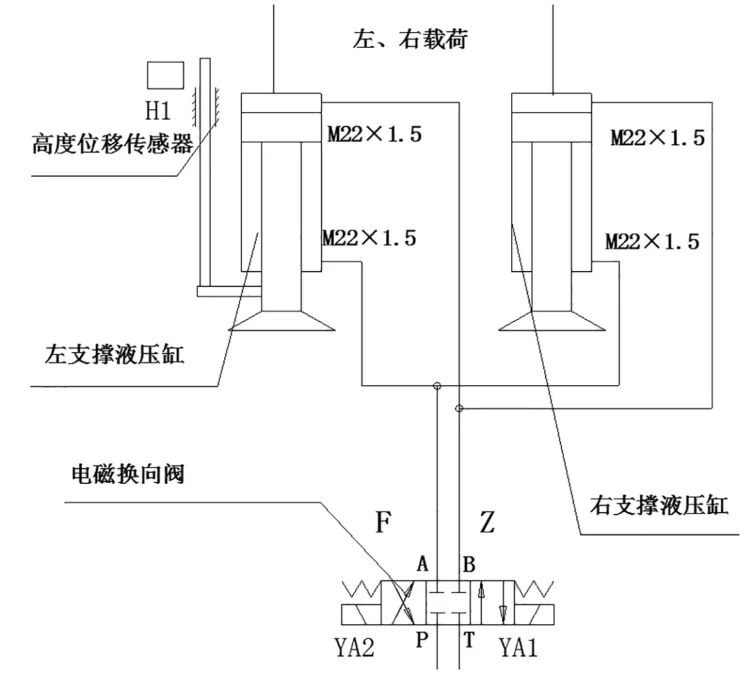
图1 重载平台支撑液压回路原理
1 重载发射平台液压缸回收失控仿真
1.1 仿真模型及原始参数
根据系统参数和动作流程建立的仿真模型[2]如图2所示。在实物系统中,当支撑液压缸起升到一定高度后进行回收时,正常的运动步骤为:缸筒在重载作用下下降,活塞杆触地不动;当轮胎触地承载后,缸筒不动,活塞杆在额定流量和压力下正常回收。由于缸筒和活塞运动具有相对性,仿真模型中将缸筒作为参照基准(不动点)进行研究,不会影响仿真结果。

图2 系统仿真模型示意
仿真参数如下:
单缸载荷质量为12 000 kg,电磁换向阀型号为4WE10E3X/CG24N9K4,换向时间可调节为20~200 ms,通径为10 mm;理论极限功率为N=50 kW[3],系统实际压力为20 MPa,油源流量为30 L/min。其他参数(如油缸结构参数)按照实际参数给出。
1.2 仿真工况及结果分析
从液压专业知识经验来看,考虑到调节方便性和阀件的使用特性,一般对于换向时间可调的电磁换向阀的切换时间调节在40~100 ms,因此仿真过程将换向时间40 ms和100 ms作为典型工况,下面分别按照以下两种情况进行分析。
a)电磁换向阀换向时间为40 ms,正腔压力为0 MPa。平台下降瞬间电磁换向阀的压力流量曲线如图3所示。
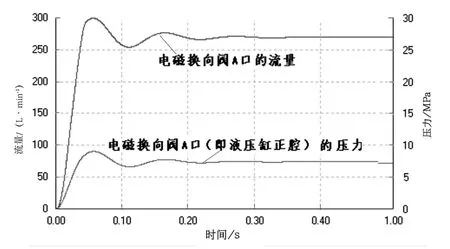
图3 平台下降瞬间电磁换向阀的压力流量曲线

图4 平台下降瞬间电磁换向阀的压力流量曲线
从图3、图4的仿真曲线可以看出:
a)在平台下降的瞬间,压力和流量在0.2 s内均达到最大值,有较大的压力和流量冲击,因电磁阀节流和液动力[4]作用,最终在压力达到平衡重载质量后系统趋于稳定阶段。此阶段虽然压力流量稳定,平台属于稳定快速下降,但是其运动速度约为150 m/s,对实际情况而言,在该速度下发射平台的轮胎较快着地,此时载荷将转移到轮胎及车架,活塞杆才按照正常的回收速度回收。
c)从图3和图4曲线对比可看出,电磁阀换向时间越短,压力峰值越大,但是流量峰值基本不变。换向时间越长,压力和流量波动的频率变小,且压力波动幅值降低,系统稳定性较好,但是系统压力和流量之积没有改善采用电磁换向阀延时对消除过冲现象效果不明显。因此必须采取其他措施进行补偿或消除重载引起的过冲。
2 消除重载平台下降过冲措施仿真分析
对于液压系统消除压力流量过冲简单、常用的方法是采用节流阀[7],由于在重载下降时油缸正腔没有压力,造成了系统瞬间加速启动[8],因此对油缸正腔充压和加节流阀的方式进行仿真分析,仿真过程换向阀的换向时间均取40 ms。
2.1 正腔预冲压仿真分析
设正腔充压5 MPa,平台下降瞬间电磁换向阀的压力流量曲线如图5所示。
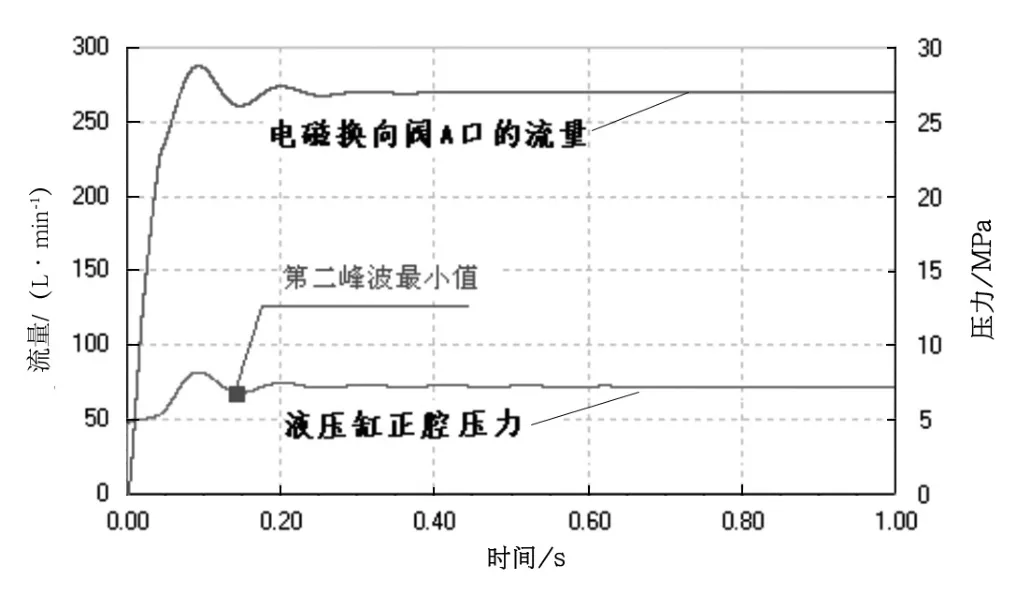
图5 平台下降瞬间电磁换向阀的压力流量曲线
从图5中曲线可以看出,在液压缸正腔充压5 MPa后,压力和流量曲线峰波变得平缓,其峰值有所减小。从曲线上看正腔预充压力越接近支撑液压缸起升压力时(即发射平台起升时的额定工作压力)效果越好,但考虑到系统载荷偏差,一般预充压力应比最小起升压力低2~4 MPa(曲线2中不大于第二个最小峰值),这样不仅可以避免出现预充压时异常动作,同时避免新的压力峰波。
2.2 正腔加节流阀仿真分析
设正腔充压5 MPa,并增加节流阀,正腔充压增加10 mm节流阀的仿真结果曲线如图6所示。图7为正腔充压增加8 mm节流阀仿真结果曲线。

图6 正腔充压增加10mm节流阀仿真结果曲线
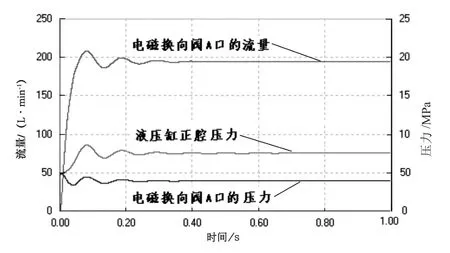
图7 正腔充压增加8mm节流阀仿真结果曲线
通过对增加10 mm、8 mm节流阀的2组仿真曲线的综合分析,可以得出增加节流阀可以有效地消减作用在电磁换向阀上压力和流量均值,其中对流量峰值的效果非常明显,使电磁换向阀的流量和压力之积急剧减小,有效消除作用在电磁阀上的功率[9],该方法完全可以消除流量和压力过大而导致超电磁阀功率超限的问题。
从液压缸正腔压力曲线可以看出,增加节流阀对液压缸内部压力几乎没有影响,因此在校核液压缸强度时必须考虑这种工况下的压力冲击和幅值。
从不同通径节流阀抑制通过电磁换向阀工作的功率效果来看,节流阀通径越小节流效果越明显,对电磁换向阀断电复位越有利。但在实际工作中,支撑液压缸下降一定距离后轮胎会着地,因此在正常回收过程不需要节流,必须综合考虑。考虑到实际系统应用,一般在选择节流口大小时应按如下原则:
a)增加的节流阀开口不是越小越好,增加节流阀后通过电磁换向阀的流量和压力之积应不大于电磁换向阀的极限功率并留有一定的余量。
b)在正常伸收支撑液压缸的流量情况下,节流口的压差应不大于3 MPa。节流阀通径一般应为电磁换向阀通径的0.8倍左右,本例中可选8 mm节流阀,在正常工作回收时通过节流阀的流量为120 L/min,其压力损失不大于2 MPa。
3 结 论
本文通过对重载平台支撑液压缸下降或调平过冲进行了仿真分析,解释了过冲的机理,同时对液压常用的补偿措施进行了仿真分析,从理论上提出了解决过冲的技术措施,并提出了对于此类系统如何根据系统参数定量确定预充压力和增加节流阀的原则和建议,经试验验证可有效消除过冲现象。
[1] 李忠于. 雷达自动调平支撑腿力学工况分析[J]. 火控雷达技术, 2007(02): 90-91.
[2] 李永堂, 雷步芳, 高雨茁. 液压系统建模与仿真[M]. 北京: 冶金工业出版社, 2003.
[3] 李玉顺, 邹建萍. 大型重载平台支撑液压缸过冲力学分析[J]. 导弹与航天运载技术, 2015, 339(03): 87.
[4] 皮益霞, 刘明伟. 基于电磁换向阀换向时的液动力研究[J]. 湖南工程学院学报, 2003, 16(01): 36-37 .
[5] 成红梅, 范春起. 换向阀换向故障分析[J]. 2006, 127(18): 197-199.
[6] 雷天觉. 新编液压工程手册[M]. 北京: 北京理工大学出版社, 1998.
[7] 蒋少茵. 数字节流阀的控制[J]. 机械与电子, 2002(3): 55-56.
[8] 明仁雄. 重载液压缸液压冲击值计算[J]. 港口装卸, 1996(01): 18-21.
[9] 范益群, 钱祥生. 电磁阀的切换特性和工作可靠性的研究[J]. 液压气动与密封, 1997(2): 2-4.
Simulation Analysis and Countermeasures of Losing Control of over Loading Flat’s Hydraulic Cylinders’ Drawing Back
Li Yu-shun, Lu Shi-qi, Xu Yun-hui, Lyu Ming-liang
(Beijing Institute of Space Launch Technology, Beijing, 100076)
The overshoot maybe occur when support hydraulic cylinders of a high loading flat moving which go against the safe and level adjusting work. It effects the natural functions clearly of such a system. This paper gives the countermeasures and the method of preferences basing on the simulation analysis of over rushing when high loading flat’s hydraulic cylinders’ drawing back. The findings contribute to following-up system designing.
High loading flat; Support hydraulic cylinder; Rush over analyze
V553.1
A
1004-7182(2016)05-0033-04
10.7654/j.issn.1004-7182.20160507
2016-04-08;
2016-06-10
李玉顺(1970-),男,研究员,研究方向为航天地面液压传动与控制
