直角坐标搬运机器人控制系统研究
2016-04-07金嘉琦徐振伟
金嘉琦,徐振伟,刘 畅
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
直角坐标搬运机器人控制系统研究
金嘉琦,徐振伟,刘 畅
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
对控制系统的一般组合形式进行概述,并根据直角坐标搬运机器人工作特点设计PC+运动控制卡的控制方式。基于VB进行软件设计,以PC机、运动控制卡、伺服驱动器、传感器等硬件部分形成机器人完整控制系统。既能精确的控制机器人工作又能实时的监控机器人的工作状态。为搬运机器人控制系统设计提供解决方案。
直角坐标机器人;控制系统;运动控制卡;VB
0 前言
随着中国制造2025实施制造强国战略发展的大潮,机器人越来越多的应用到各个领域。直角坐标机器人由于其结构紧凑、强度高、运动简单、工作范围广的特点,在工业生产中得到广泛运用。直角坐标机器人系统是由机器人本体、工作装置、控制系统、驱动装置、人机界面、防护装置等组成。而控制系统是机器人的大脑,控制着整个机器人系统的运行方式,为灵活运行高效工作提供保障。
1 运动控制系统总体方案
市场上常用的自动化设备运动控制系统包括以下几种形式[1]:
(1)单片机系统。单片机系统结构简单,体积小,成本较低;但由于本身无自开发能力必须借助开发工具来开发应用软件,抗干扰能力差,处理任务单一。因此多用于消耗品上,一般不用于工业设备。
(2)PLC控制系统。PLC的I/O驱动能力强,易于扩展,图形化开发界面,抗干扰能力强;但其体系结构封闭,各PLC产品互不兼容,编程语言及指令也各异,学习过程较为复杂。
(3)专用运动控制器。专用运动控制器是针对设备特定的运动方式和运动特点专门开发的控制器。其针对性强,控制功能良好,传输效率高,抗干扰能力强。但开发成本高,柔性极差。
(4)PC+运动控制卡控制系统。运动控制卡采用高速DSP或专业运动控制芯片来满足控制需要,通过PCI与PC机相连,具有超强数据处理能力,可以实时采集各种各样的数据信息对生产设备进行控制。且能执行比较复杂的控制算法。
随着PC机的广泛使用,PC+运动控制卡方案的使用率越来越高,通常用于运动过程、机械轨迹都比较复杂,而且柔性比较强的机器[2]。由于直角坐标机器人工作需要较高的柔性,所以本文选择PC+运动控制卡组合控制系统。
2 控制系统硬件设计
2.1 控制系统结构与控制原理
直角坐标搬运机器人控制系统硬件部分结构如图1所示。运动控制卡通过PCI连接PC机,组成上位机和下位机两部分。上位机在系统中为PC机,主要负责系统监控、人机界面的管理和指令控制,协调系统进行工作;运动控制卡为下位机,主要负责处理对上位机发出指令的处理,实现复杂精确的轨迹运动[3]。伺服驱动器负责接收运动控制卡发出的运动指令,驱动伺服电机运动,并根据编码器与传感器反馈的速度和位置信号对电机进行调整。
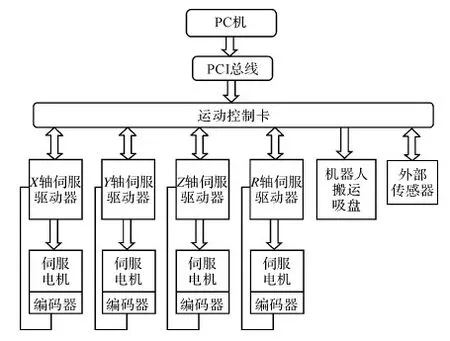
图1 控制系统硬件结构图Fig.1 Hardware structure of control system
机器人工作需要良好的精确性和稳定性,所以采用速度与位置的双闭环控制系统,伺服控制系统原理如图2所示。通过伺服驱动器对其中的前馈增益、比例放大、积分增益的设置来调节速度闭环的特性;运动控制卡通过PID+速度前馈(PID+Kv滤波器)复合控制的方式,来改善实际位置与指令的关系[4-5]。通过对各参数的调节,实现电机精确运动,完成预定工作的目的。其控制计算方法为
(1)
式中,Ui为输出值;ei为采样周期的输入与输出的位置误差;Vi为电机速度;Kp为比例放大系数;Ki为积分增益系数;Kd为微分增益系数;Kv为速度前馈系数。
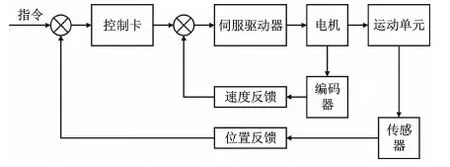
图2 伺服控制系统原理Fig.2 Principle of servo control system
2.2 运动控制卡结构与工作原理
DMC2410C-A是雷赛公司推出的PCI总线4轴运动控制卡,能驱动绝大多数的伺服驱动器。DMC2410C-A卡以脉冲驱动方式带动电机,脉冲数量控制电机转动的圈数,频率控制电机转动的速度,还能将报警、到位等信号接入控制卡,实时反馈伺服状态。并配备有WINDOWS系统下的动态链接库,用VB、VC等工具方便编写应用软件,同时提供了界面直观、功能丰富的MOTION2000调试软件,可轻松的测试控制卡接口及电机驱动系统。
ACC3410-EX是用于连接运动控制卡与PC机及驱动器的接线盒,图3为接线盒接口布置示意图。接口 X1 是与运动控制卡连接的接口。接口 X4~X7 为轴 1~轴 4 的信号接口;接口 X14 为专用输入信号接口;接口 X10 为通用输入信号接口;接口 X11 为通用输入信号接口;接口 X12 为通用输出信号接口;接口 X13 为通用输出信号接口;接口 X8 为急停接口;接口 X9 为电源接口。
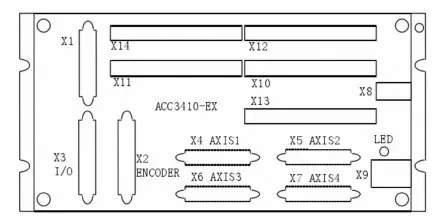
图3 ACC3410-EX接口布置示意图Fig.3 Interface layout diagram of ACC3410-EX
3 控制系统软件开发
由于VB具有良好的图形用户界面,并能轻松创建控件可以方便的使用提供的组件创建和开发程序。基于VB程序开发,机器人软件控制界面如图4。
控制系统软件开发需满足机器人工作要求:(1)机器人可以完成一键回到原点设置;(2)手动运行时实现四轴(X、Y、Z、R)联动和单轴运动;(3)实现机器人按程序自动运行;(4)实时监测机器人运动状态速度、位移等;(5)开关机器人工作装置吸盘。
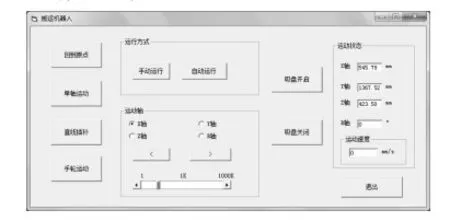
图4 人机控制界面Fig.4 Man-machine control interface
在进行精确的运动控制之前,需要设定运动坐标系的原点。在机器人运动单元上,每个轴都有一个位置传感器用于设置位置参考点,即原点位置。在正常运动之前,都需要用回零指令控制运动滑块向原点方向运动,当控制卡检测到原点信号后,滑块自动停止。运动平台上用于正向限位的传感器信号EL、反向限位的传感器信号EL-。原点返回采用原点电平状态作触发信号:
(1)使用 d2410_set_HOME_pin_logic 函数设置原点开关的有效电平;
(2)使用 d2410_config_home_mode 函数设置回原点方式;
(3)设置运动的速度形式曲线;
(4)使用 d2410_home_move 函数进行回原点运动;
(5)回到原点后,指令脉冲计数器清零。
机器人控制界面分为手动运行和自动运行两种运行方式,手动运行状态下可实现选择某一工作轴,并设置速度倍率进行正向反向移动。还可以选择手轮运动更加方便的调整机器,根据手摇的速度发出脉冲。在此模式下,吸盘开关按钮可以实现手动控制抓取释放工件。
自动运行模式即程序运行模式如图5,点击程序启动按钮运动控制卡发出脉冲信号,对伺服电机进行联合控制实现各个轴的分别动作到达工件所在位置或卸料位置,并通过气缸对搬运吸盘的开关控制,进行工件的抓取与释放。实现机器人按工作轨迹运动并进行物件搬运工作。
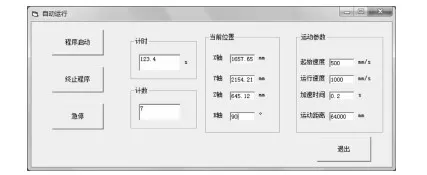
图5 自动运行模式Fig.5 Automatic operation mode
DMC2410C-A卡各工作轴都有编码器输入接口,用于检测直线运动单元的位移或速度(电机的转角)。编码器有 EA、EB、EZ 三个信号,脉冲计数信号由 EA 和 EB 端口输入;它可以接收两种类型的脉冲信号:正负脉冲输入或 A/B 相正交信号,EZ 信号是编码器零位信号。以实现机器人运动状态的实时监控。
4 结论
本文根据直角坐标搬运机器人工作特点设计PC+运动控制卡的控制方式。基于VB进行软件设计,以PC机、雷赛DMC2410C-A运动控制卡、伺服驱动器、编码器、传感器等硬件部分形成机器人完整控制系统[6],既能精确的控制机器人工作又能实时的监控机器人的工作状态。通过完整的控制系统设计过程,为搬运机器人控制提供解决方案。
[1] 王炎欢,陈阿三,刘鑫茂.直角坐标机器人控制系统的研制[J].轻工机械,2010,28(4):67-69.
[2] 徐斌.基于运动控制卡的机械手控制系统研究[J].合肥学院学报(自然科学版),2010,20(3):86-88.
[3] 张志远,李琪,毕海深.基于直角坐标机器人的软袋再包装自动上料系统[J].制造业自动化,2012,34(3):11-14.
[4] 孔慧勇.基于运动控制卡的全闭环控制系统研究[D].成都:四川大学,2003.
[5] 赵铁军,王钢,王新.等离子弧表面强化机器人控制系统研究[J].组合机床与自动化加工技术,2015(7):114-117.
[6] 卢涛,于海生,吴贺荣.基于VC的直角坐标机器人控制系统设计[J].青岛大学学报(工程技术版),2014,29(1):7-11.
[7] 孟德欣,谢婷,王先花.VB程序设计[M].北京:清华大学出版社,2009.
Research on the control system of cartesian-coordinates cransport robot
JIN Jia-qi, XU Zhen-wei, LIU Chang
(School of mechanical engineering, Shenyang University of Technology, Shenyang 110807, China)
Based on research of the control system general combination,this paper designs control PC and motion control card in accordance with the work features of cartesian coordinate transport robot. Software design based on VB, to part of the PC, motion control card, servo drive, sensors forming a complete robot control system. Both precise control of the robot can work and working status real-time monitoring of the robot. This can provide solutions for the transport robot control system.
cartesian coordinates robot; control systems; motion control card; VB
2016-08-01;
2016-09-03
金嘉琦(1955-),男,沈阳工业大学教授。
TP242.2
A
1001-196X(2016)06-0049-03
