一种搜救机器人的设计与越障分析
2016-04-07刘巍巍王成龙刘慧芳
刘巍巍,王成龙,刘慧芳
(沈阳工业大学 机械工程学院, 辽宁 沈阳 110870)
·新技术新设备·
一种搜救机器人的设计与越障分析
刘巍巍,王成龙,刘慧芳
(沈阳工业大学 机械工程学院, 辽宁 沈阳 110870)
为了解决现有履带式煤矿井下救援机器人质量偏重、机动性较差的问题,采用轮毂电机为动力,设计了一款具备检测功能的双摇臂搜救机器人。根据双摇臂履带机器人的整体结构,结合事故后井下地形和障碍物的构形特点,得出了障碍物的简化模型,采用D-H法分析了机器人的最大越障能力,利用Solidworks软件对机器人进行了建模并在Adams中进行了仿真,结果表明所设计的机器人能够实现对理论最大障碍物的跨越,验证了在保证搜救机器人越障能力的前提下,由减轻机器人重量来提高其机动能力的可能。
机器人;轮毂电机; D-H法;越障分析
0 前言
我国是产煤大国,目前由于采煤机械化程度不够高,从业人员整体素质偏低等原因,导致我国煤炭生产百万t死亡率是南非的30倍、美国的100倍[1]。目前我国在煤矿事故发生后大多是派遣救护队员直接下井侦探井下环境来为指挥中心制定搜救方案提供信息,这种方式由于缺乏对灾后井下环境的充分了解,往往使救护人员处于危险的环境中,容易引起二次伤害和爆炸。为了能在事故发生后、救援行动开始前为指挥中心提供更全面的井下环境信息,快速制定科学合理的营救方案,需要研制代替救护队员深入事故后的井下采集环境信息的搜救机器人。
国外美国桑迪亚实验室研制的Gemini-Scout搜救机器人身长约1 m,可下潜到水中0.45 m处,并搭载了双向对讲机、红外摄像头、多种气体传感器。美国Remotec公司的Andros Wolverine机器人,能采集视频、图像,探测危险气体,但是它体型庞大,高约1.27m,重量超过0.5t[2]。国外的救援机器人虽然技术较我国先进,但是由于外国多为露天煤矿和国内外防爆要求的不同,国外的先进设备还不能应用于我国。
中国矿业大学研制了CUMT1——CUMT5一系列的煤矿搜救机器人,该系列机器人通过对行走机构的改进优化,其越障性能得到逐步提升[3]。北京理工大学研制的BIT型煤矿搜救机器人,采用了六履带四摆臂的行走机构[4]。上述机器人搭载传感器、摄像机均能实现对灾后井下信息的采集,但是存在车体传动结构复杂,车身偏重、机动性较差的问题。
目前同类型的履带式机器人整体重量一般都在35kg以上[5]- [6],重量偏大。为了使投入到煤矿事故搜救中的机器人减轻自身重量,采用轮毂电机做驱动设计了一款探测搜救机器人。
1 机器人设计
1.1 整体设计
为了使搜救机器人能够到达事故发生后的井下各方位实施搜救探测,机器人采用履带行走;为增强机器人的越障能力,在机器人前进方向设置了两个摇臂以辅助其越障。机器人的驱动共有4个轮毂电机,前面2个用于驱动摇臂辅助越障,后面2个用于驱动履带实现机器人的前进和后退。机器人机构简图如图1所示。

1.小从动轮 2.大从动轮 3.摇臂履带 4.摇臂轮毂电机 5.行走履带 6.驱动轮毂电机图1 机器人机构简图Fig.1 The structure diagram of the robot
为了使机器人能获得煤矿事故发生后的井下环境信息,机器人搭载了能检测瓦斯、CO等有毒气体的传感器和用于在井下黑暗无光的环境中拍摄井下环境和搜救被困人员的红外摄像系统;控制器通过无线通信实现地面操作终端和各功能部件的指令、图像的传输;电池采用锂离子可充电电池为机器人提供电源。
1.2 电机的设计
为减轻机器人的整体重量,机器人应用了4个轮毂电机做驱动。
由于煤矿事故发生后的井内往往含有大量的可燃性粉尘、CO等易燃易爆气体,现有的普通低速外转子式直流无刷轮毂电机在工作时因会产生热量、火花,容易引起爆炸,不能直接应用到井下设备中使用,根据国家防爆标GB3836.1-2010的要求对其进行了防爆改造[7]。
轮毂电机两侧连接盖板改为采用材料为Q235A厚度5 mm的圆形隔板,利用防爆螺栓将其与轮毂电机的圆柱外壳(转子)连接,二者共同构成轮毂电机的防爆壳体实现电机与外界环境的隔离防爆。在空心轴输出端加装了防爆铜环用于消除爆炸时可能产生的火花,为进一步增强防爆能力。另外,为使轮毂电机实现对履带的驱动,在其圆柱外圆上设计有驱动齿。最后对有连接电机和控制器、电池连线的空心轴处使用阻燃介质进行浇封,实现电机腔和控制腔的隔离。轮毂电机改造前后的对比如图2所示:
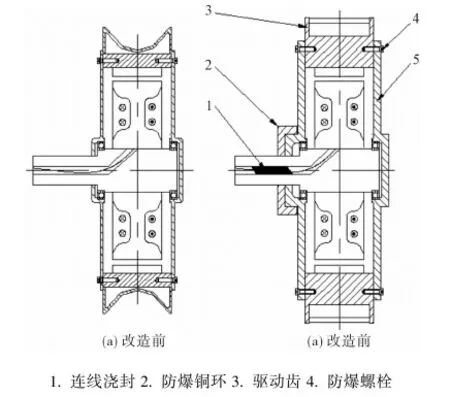
1.连线浇封 2.防爆铜环 3.驱动齿 4.防爆螺栓 5.防爆盖板图2 轮毂电机改装前后结构图Fig.2 The comparison diagram of the hub motor before and after being refitted
通过采用经过改造后的低转速、大扭矩的外转子式直流无刷轮毂电机做驱动,实现了电机对负载履带的直接驱动,与以往同类型机器人相比,省去了4个减速机构及附件,使机器人整体重量降到30kg左右,实现了机器人整体重量的下降。
2 机器人的越障分析
越障能力是搜救机器人灵活性的体现,为实现对井下区域的全面侦测,要求机器人具备高的越障能力。
2.1 障碍物模型简化
煤矿事故发生后,井下会产生煤块、碎岩块等几何形状不规则的障碍物,根据这些障碍物构形特征的相似性同时也为了更加方便地分析机器人的越障过程,把搜救机器人行进过程中可能遇到的障碍物进行了简化,其模型简化图如图3所示。

图3 障碍物简化模型图Fig.3 The simple diagrams of the obstacles
2.2 基于D-H法的机器人越障分析
把机器人看成刚体来研究,可用D-H法来对其进行越障分析[8]。
设机器人前后轮之间的长度为L,摇臂长度为l,车身重量为m1,摇臂重量为m2,机器人轮毂电机的半径为R,摇臂小轮半径为r,机器人全身质心距全身坐标系的距离为l2,摇臂质心距其坐标系距离为l2,障碍物高度为h。以机器人跨越障碍时后轮与地面的接触点为原点建立基础坐标系X0Y0。如图4所示。

图4 机器人越障位姿Fig.4 The obstacle-crossing pose of the robot
机器人跨越障碍时全身相对于X0Y0的转角为α1,前摆臂相对于全身的转角为α2,则全身相对于基础坐标系的转化关系和前摆臂相对全身坐标系的转化关系为
式中,0为基础坐标系;1为全身坐标系;2为前摆臂坐标系;c1为cosα1;s1为 sinα1;c2为cosα2;s2为 sinα2;α1为全身转角;α2为前摆臂转角;R为轮毂电机半径;r为前摆臂从动轮半径。
全身各部分质心位置为
式中,P1为全身质心坐标;P2为前摇臂质心坐标。
全身坐标
摇臂质心位置相对全身质心的坐标为
机器人相对全身坐标系的质心坐标为
相对基础坐标系X0Y0质心坐标为
由此可得质心位置坐标为
s1m2s2l2/m=
c1(m1l1+m2L)/m+m2l2c1+2/m
c1m2s2l2/m+R
=s1(m1l1+m2L)/m+m2l2s1+2/m+R
式中,s1+2为sin(α1+α2);c1+2为cos(α1+α2)。
机器人越过最高障碍时,其质心位置与地面的垂线正好同障碍物前边缘共线,此时障碍物高度为
h=H-R/c1=
s1(m1l1+m2L)/m+m2l2s1+2+/m+R-R/cosα1
把搜救机器人参数带入质心坐标及障碍物高度表达式为
h=H-R/c1=275sinα1+
11.167sin(α1+α2)+115-115/cosα1
式中,L=550 mm;l=210 mm;l1=220 mm;l2=67 mm;R=115mm;m1=25 kg;m2=5 kg。
通过Matlab计算求解可得到机器人理论最大越障高度h=158 mm,此时机器人全身摆角α1=48°,摇臂摆角α2=42°。全身转角和摇臂摆角与越障物高度的关系如图5所示。

图5 全身转角、摇臂摆角与越障高度的关系图Fig.5 The relation graph of body,swing arms and the highness of surmounting obstacle
3 仿真验证
为了对设计的搜救机器人的越障能力进行验证,对机器人的越障过程进行了仿真。
3.1 模型的建立
在Solidworks软件内对机器人进行了三维建模与装配。为了便于在Adams中进行仿真对机器人模型进行了简化。最后模型包括车体、轮毂电机(以驱动轮代替)、从动轮、摇臂和小前轮。在车体和轮毂电机、摆臂处添加了旋转副和旋转驱动分别实现对机器人的驱动和摇臂的摆动;后轮毂电机和前从动轮之间采用耦合副代替履带传动;车体与摇臂之间添加了旋转副和旋转驱动来代替前轮毂电机对摇臂的驱动;在摇臂和小前轮处添加了旋转副和旋转驱动来代替前轮毂电机与小从动轮的履带传动[9,10]。
在Adams中建立了高度为158 mm的台阶用于模拟机器人要跨越的障碍。机器人和障碍物之间添加接触力来模拟机器人与障碍物的接触环境。机器人和障碍物在Adams的简化模型如图6所示。
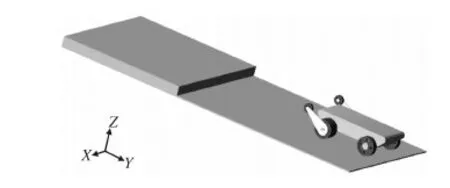
图6 机器人与障碍物的简化模型Fig.6 The simplified model of the robot and the obstacle

图7 车身和摇臂各自转角Fig.7 The rotation angle of the body and the ranging arms
3.2 模型仿真
模型验证成功后开始仿真,采用STEP函数实现摇臂的摆动。仿真时间为6 s,仿真步数为51。车身和摇臂各自转角如图7所示。
通过仿真分析得到车身和摇臂质心摆角图,由上图可知越障过程中车身摆角为50°;摇臂摆角为85°,由于摇臂相对水平面有45°的初始角,所以摇臂实际摆角为40°,与理论值接近,结果合理,验证了设计的合理性。
4 结论
通过直接对普通低速外转子式直流轮毂电机的外转子加装防爆隔板,实现了电机与井下易燃易爆气体的隔离,使其可以直接应用于井下搜救机器人中;由于轮毂电机的使用,省去了中间的传动结构,实现了电机对负载的直接驱动,与同类型机器人相比整体重量减轻约10%,实现了机器人的轻量化,通过对搜救机器人越障过程理论分析的结果和仿真结果的对比,验证了设计方
案的可行,达到了减轻机器人重量和提高机器人机动性的目的。
[1] 王国庆,许红盛,王恺睿. 煤矿机器人研究现状与发展趋势[J]. 煤炭科学技术,2014,42(2): 73-77.
[2] 刘建.矿用救援机器人关键技术研究[D].徐州:中国矿业大学,2015:8-9.
[3] 孙国栋,李雨潭,朱华.一种新型煤矿救援机器人履带行走机构设计[J].工矿自动化,2015,41(6):21-25.
[4] GAO Jun-yao,ZHU Jian-guo,GAO Xue-shan,et al. Electric and Control Technique Research of a Coal Mine Detect Robot[C]// 9th International Conferenceon Electronic Measurement & Instruments.Beijing,China,2009.3-729-3-735.
[5] 李允旺,葛世荣,朱华,等.四履带双摇臂机器人越障机理及越障能力[J].机器人,2010,32(2):157-165.
[6] 赵建伟,张云龙,商德勇,等.巡检机器人越障运动学分析及仿真[J].机电产品开发与创新,2015,28(3):7-9,19.
[7] 毛杨明. 煤矿井下探测机器人防爆电机与动力源研究[D]. 徐州:中国矿业大学,2015: 43-60.
[8] 张海南.轮退机器人运动学与越障分析[D].天津:河北工业大学,2014,17-20.
[9] 钮冬科.轮履复合式反恐机器人系统设计[D].上海:上海工程技术大学,2015:45-61.
[10]胡晗. 煤矿井下探测机器人机构与特性分析[D].太原:太原理工大学,2014:62-63.
Design and analysis on obstacle-crossing of a rescue robot
LIU Wei-wei,WANG Cheng-long,LIU Hui-fang
(School of Mechanical Engineering, Shenyang University of Technology, Shenyang 110870,China)
This article focused on solving the problem of large mass and less mobility in the existing tracked coal mine rescue robot. A robot, which had two swing arms and the ability of detecting several kinds of gas under the coal mine, had been designed with hub motors. Based on the structure of the robot and the feature of the terrain and the obstacles after the accident, the simplified model of the obstacles was got. The biggest obstacle-crossing ability of the robot was analyied in D-H method, the three-dimensional model of the robot was established with solidworks software and carried out simulation with Adams, the simulation results of the obstacle crossing showed that the robot could cross the highest obstacles which was theoretical. It was verified that the mobility of the rescue robot could be improved by reducing weight under the premise of guaranteeing the obstacle-crossing ability of the rescue robot.
robot; hub motor; D-H method; obstacle-crossing analysis
2016-07-16;
2016-10-27
国家自然科学基金资助项目(51305277)
刘巍巍(1973-),女,辽宁桓仁县人,沈阳工业大学副教授,硕士,主要从事知识管理,产品快速设计等领域研究。
王成龙(1988-),男,沈阳工业大学硕士研究生。
TP242.3
A
1001-196X(2016)06-0008-05
