基于AD2S1210的旋变解码电路设计
2016-03-27刘芸邑田桂平
刘芸邑,郑 婕,李 燕,田桂平,魏 伟,陈 洁
基于AD2S1210的旋变解码电路设计
刘芸邑1,2,郑 婕1,2,李 燕1,2,田桂平1,2,魏 伟1,2,陈 洁1,2
(1.昆明物理研究所,云南 昆明 650223;2.于起峰院士工作站,云南 昆明 650223)
介绍了在步进凝视扫描成像平台的位置检测中,传感器的解码电路。利用旋转变压器-数字转换(RDC)芯片AD2S1210,对旋转变压器J78XFS009进行解码,组成解码电路。解码电路包括了AD2S1210的工作原理电路、外围电路,以及该芯片与单片机和旋变的连接电路等。整个电路的结构简单,可靠性强,稳定性好,精度较高,具有抗干扰能力强的优点,能够在恶劣的环境下工作,可以有很高的实用价值。经过实验结果表明,应用该电路可以精确的检测电机的位置信号,能够实现电机的多闭环控制。
旋转变压器;AD2S1210;旋转变压器-数字变换器;电路设计
0 引言
非制冷凝视器件在旋转扫描全景拼接时,如果速度过快,会造成图像拖尾,图像质量受损。一般采用步进凝视的扫描方案解决上述问题。即在图像采集的瞬间扫描运动平台低速运行,完成积分图像采集后,运动平台迅速加速,在到达下一个图像采集位置前开始减速,速度降低后进行下一幅图像的采集,如此周期步进即可得到全景图像,成像质量可接近于凝视成像[1]。由此,需要完成对步进凝视扫描成像平台的精确运动控制,即实现对该平台的位置的精确检测和控制。控制精度直接影响全景图像质量,对项目成败具有重要意义。
光学编码器和旋转变压器是两种经常作为角度位置检测的传感元件。光学编码器的输出信号是纯数字量,能够方便处理,最初有过良好应用。但是光学编码器在应用过程中很大程度上依赖于电机参数,且抗干扰能力弱,在恶劣的条件下不宜使用,所以应用受到了限制。而旋转变压器在早期由于复杂的信号处理电路以及较贵的价格,应用受到了限制。但是其可靠性高,精度高,所以应用越来越广泛[2]。
旋转变压器旋转输出的信号是一个两相正交的模拟信号,所以在应用中,需要一个模数转换电路,把模拟量变换成数字量[3]。目前采用的解码方法大多都是使用专用集成电路,其中的代表有美国模拟器件公司的AD2S系列和日本多摩川公司的AU68系列等[4]。本文所用的解码芯片AD2S1210是分辨率为10到16位的完整的RDC芯片。而且该芯片内部的正弦波振荡器产生的激励频率范围可达2~20kHz。其最大的跟踪速率为3125r/s,检测角度数据的最大精度为±2.5¢,能够满足控制要求[5]。
1 位置检测系统原理
1.1 旋变工作原理
旋变是一种旋转变压器,通常配置是初级绕组位于转子上,两个次级绕组则位于定子上,其结构如图1所示。
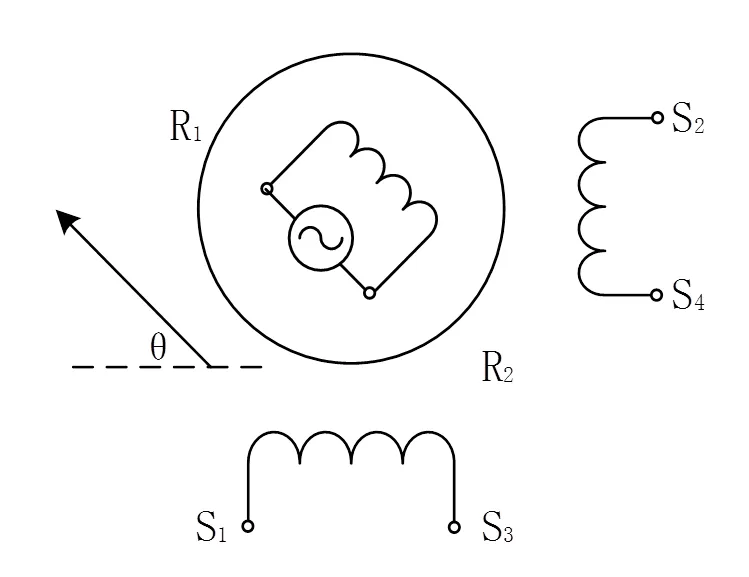
图1 经典旋转变压器
旋变输出电压(3-1,2-4)的计算如公式(1)和(2)所示[6]:
3-1=0sint×sin(1)
2-4=0sint×cos(2)
式中:为轴角;sint为转子激励频率;0为转子激励幅度。
1.2 AD2S1210芯片解算原理
AD2S1210芯片的工作原理是Type Ⅱ跟踪闭环原理。当输出更新1LSB时,旋变的位置旋转过了最低有效位的角度。转换器产生输出角,反馈后与输入角进行比较,藉此来跟踪轴角;两个角度之差即为误差,如果转换器能够精准地跟踪输入角,则误差趋于0。为了测量误差,需使3-1与cos相乘,并将2-4与sin相乘:
0sint×sincos(3-1) (3)
0sint×cossin(S2-4) (4)
二者的差值为:
0sint×(sincos-cossin) (5)
利用内部产生的合成基准信号来解调该信号,得到如下表达式:
0(sincos-cossin) (6)
表达式(6)等效于0sin(-);当-的值(角误差)较小时,0sin(-)约等于0(-)[7]。0(-)即为转子的角误差与转换器的数字角输出之间的差值。
2 系统构成
图2为整个解码系统的结构图。
2.1 硬件设计
硬件电路包括解码芯片的外部接口电路,激磁放大缓冲电路和主控芯片的接口电路等。
2.1.1 芯片外围电路
AD2S1210的外围电路,如图3所示,用来保证芯片的正常工作以及与其他芯片的通信。在芯片工作的外围电路中,数字部分与模拟部分均采用+5V电压供电,滤波电容都采用10nF和4.7mF。VDRIVE供电为+5V数字电压,滤波电容也为10 nF和4.7mF。晶振选用8.192 MHz的无源晶体。
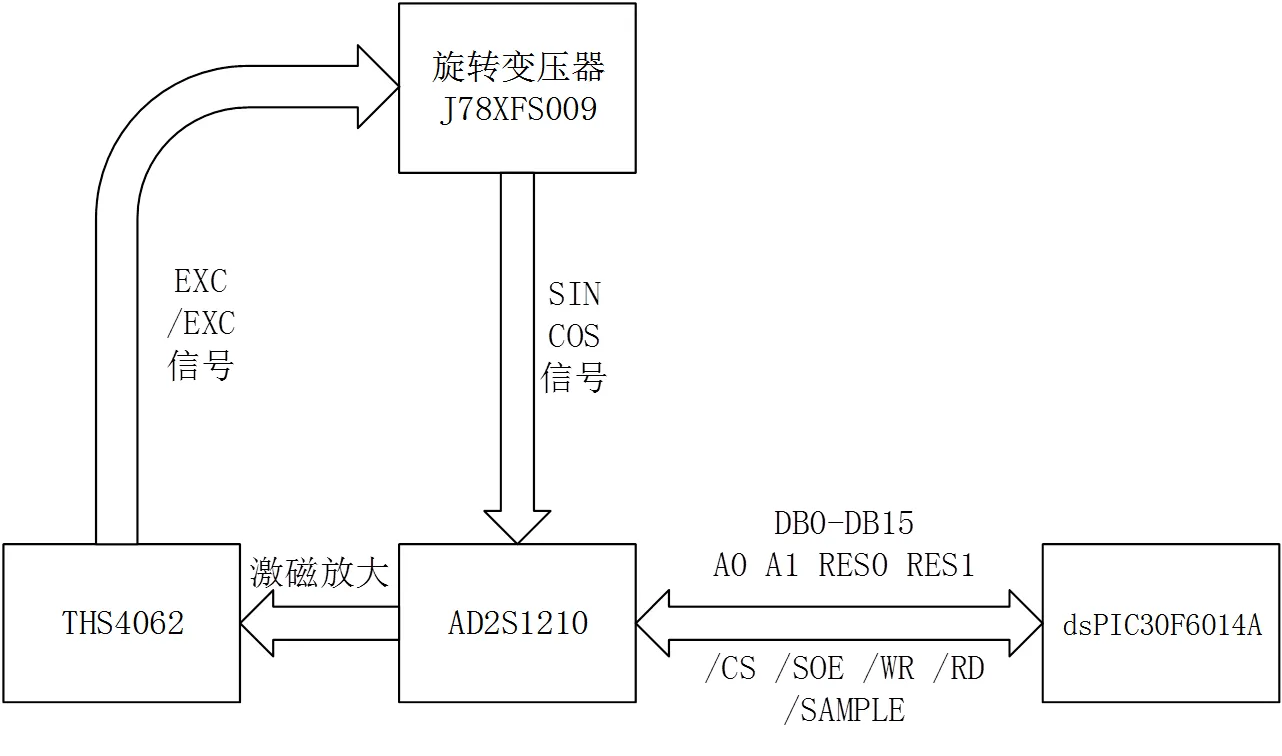
图2 系统结构图
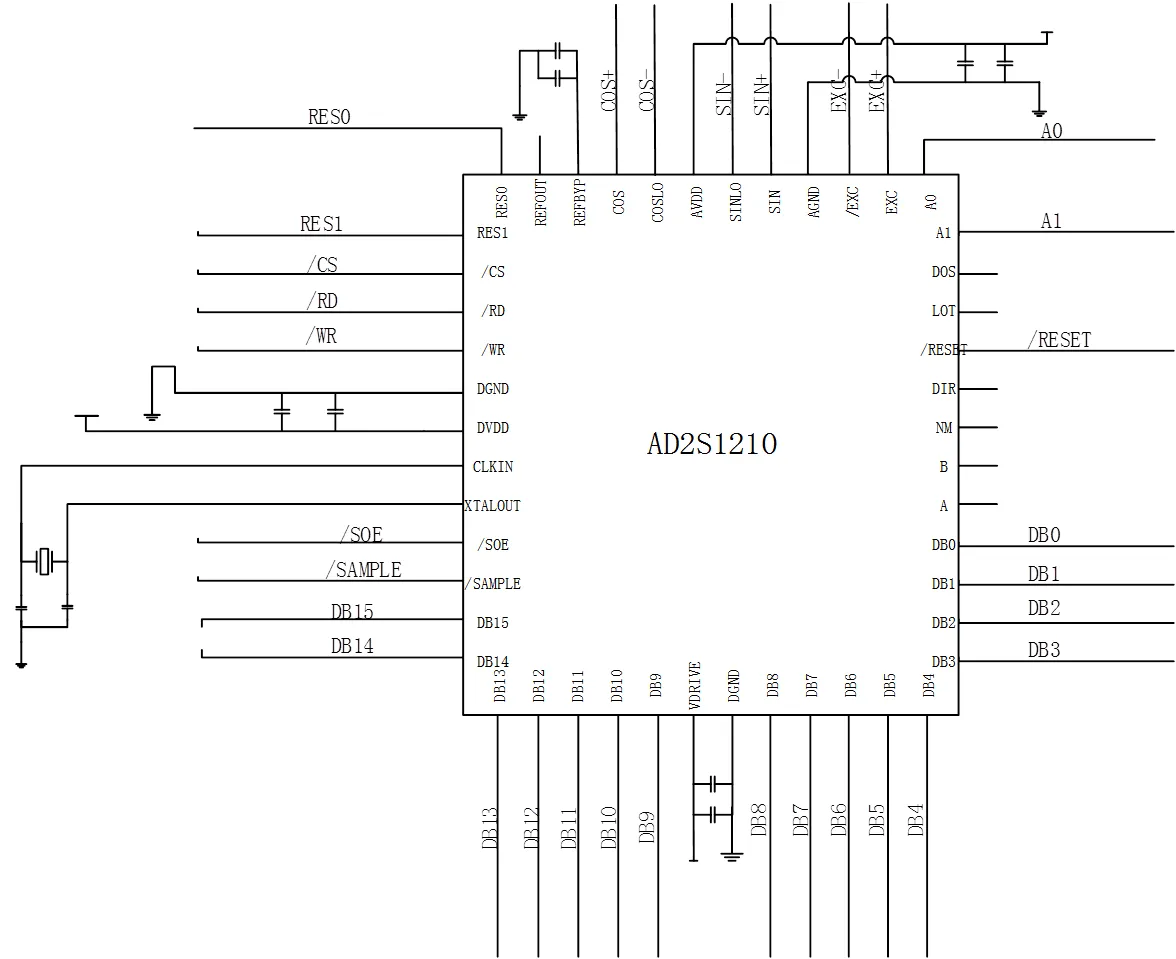
图3 AD2S1210外围电路
此时10kHz为默认的励磁频率,振荡器选用20pF的滤波电容,参考信号则选用10pF和10nF的滤波电容。
电路中,激磁信号EXC-和EXC+经过放大后驱动旋转变压器,旋变将COS-、COS+、SIN-、SIN+信号反馈至AD2S1210,通过芯片内部解算以及控制器对AD2S1210的通信配置(配置过程详见软件设计)等,读取位置信息。
2.1.2 缓冲电路
AD2S1210直接输出的激磁部分,需要对电流进行增益和放大,才能将旋转变压器驱动起来。图4是基于THS4062[8]的励磁缓冲电路,将EXC-和EXC+信号放大为AXEXC-和AXEXC+(信号名仅作区分),以驱动旋变。AD2S1210的激磁信号输出端提供3.6V正弦信号,能够产生一个7.2V的差分信号。而理想状态下AD2S1210芯片的正余弦输入要求差分能够达到3.15V的幅度,而本次所选用的旋变的励磁电压为26V,所以需要设计缓冲电路来满足需要[9]。

图4 缓冲电路
2.1.3 控制器接口电路
硬件系统的主控芯片为dsPIC30F6014A,外围电路主要有时钟电路、复位电路和下载配置电路等。时钟电路能够产生严格的时序信号供主控芯片使用。复位电路是当过电压或者欠电压的情况发生时可以对控制器进行自动复位保护。下载配置电路,可将程序下载到主控芯片中去,主要用于系统程序的在线仿真和调试。
2.2 软件设计
在本次基于AD2S1210的旋变解码电路的软件设计方面,主要涉及到重点和难点是控制器dsPIC30F6014A对旋转变压器-数字转换芯片(RDC)AD2S1210的控制。
dsPIC30F系列芯片具有丰富的伺服控制的外设以及强大的运算能力,能够成为低成本高性能的伺服控制器[10]。
AD2S1210在软件编程控制时有普通模式和配置模式这两种工作模式。工作模式的选择及在普通模式下对输出数据的选择都是通过AD2S1210上的A0和A1输入引脚来配置。其设置见参考文献[5]中表8配置模式设置。
结合控制器dsPIC30F6014A系统工作频率的设置和AD2S1210的时序要求,经过计算,该电路设计可以得到均满足要求的时序设计。同时,时序也能满足AD2S1210的数据输入输出通信方式选择为并行的要求,再考虑到控制器的IO引脚资源在本电路设计中也够充足,于是确定选择并行的数据通信方式是可行的。则将/SOE引脚保持于高电平,将/CS引脚保持于低电平,使能该接口。
在并行模式下,利用8位并行接口D7至D0和WR/FSYNC引脚,可以写入AD2S1210的片内寄存器。写入AD2S1210的每个8位字的MSB决定该8位字是寄存器地址还是数据。AD2S1210所定义的各寄存器地址的MSB(D7)为高。写入AD2S1210的各数据字的MSB为低。然后,利用引脚DB7至DB0将8位地址写入AD2S1210,并利用WR/FSYNC输入的上升沿予以锁存。随后可以在引脚DB7至DB0上提供数据,并再次利用WR/FSYNC输入将数据锁存至器件。写入配置寄存器时应遵循的时序要求参见参考文献[5]中图28“并行端口写入时序-配置模式图”。需注意,在写入AD2S1210时,/RD输入应保持高电平,且写入寄存器的操作必须将AD2S1210置于配置模式。
如果需要利用AD2S1210对位置或速度信息进行回读,应当使用SAMPLE信号的输入来达到更新位置和速度寄存器里面的存储信息的目的。而能够决定是将位置数据还是速度数据传输至输出寄存器的是A0和A1的输入状态。最后,利用RD的输入读取输出寄存器中的数据,并使能输出缓冲器[11]。只有在CS引脚保持低电平的状态才能将所选数据传输至输出寄存器,同时RD为低电平时,输出缓冲器使能。而当RD为高电平时,数据引脚也为高阻态。要注意当RD为低电平时,WR/FSYNC输入应为高电平。读数据时应遵循的时序要求见参考文献[5]中图30“并行端口读出时序图”。读取数据的流程图如图5所示。
而AD2S1210的输出分辨率则由RES0和RES1引脚来配置,不同的分辨率对应不同的位置精度。该电路设计中由旋变及应用要求选择了精度最高的16位分辨率配置。在进行两种模式的变换时,RES0、RES1输入引脚所设置的分辨率和控制寄存器中设置的分辨率需要保持一致,否则输出的数据则会发生错误。
由AD2S1210说明材料及软件设计和调试经历得知:在开始控制器对AD2S1210的设置之前,需要加入对AD2S1210芯片的复位控制设置,以清除AD2S1210芯片的故障寄存器,为保证AD2S1210芯片正常工作。对AD2S1210故障寄存器的清除操作工作在配置模式下,时序参见参考文献[5]中图31“并行端口-清除故障寄存器图”。
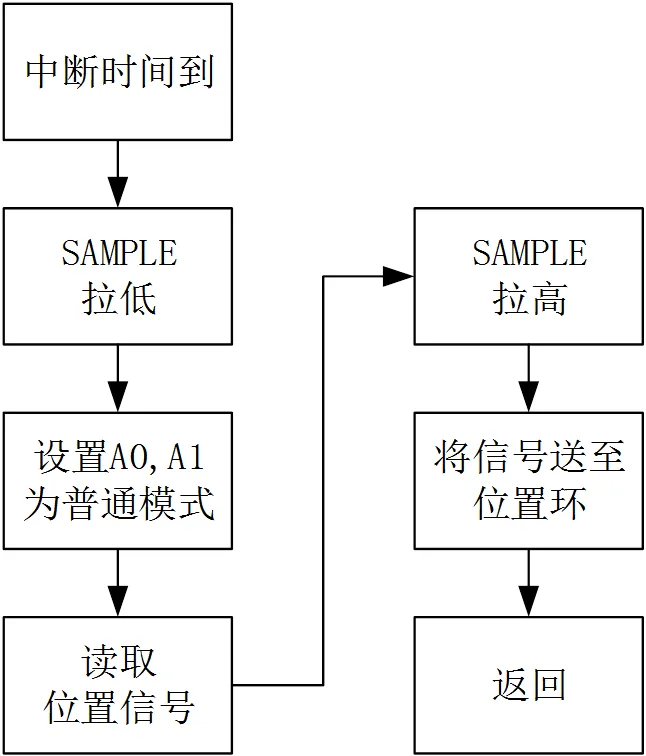
图5 信息读取流程图
2.3 结果分析
经过该解码电路与系统连接调试后,对旋转变压器的解码数据进行多次采样,得到如图6和图7所示的信号采样绘制图。这两幅图是通过串口传输到上位机,用LabVIEW中的波形图表观察到的转子位置信号。两幅图的横坐标均为时间,纵坐标均为采样的信号值,即位置数据。图6为旋转变压器连续变化时的采样信号,信号幅值随着位置的连续变化而变化;图7为旋转变压器的粗机完成一圈旋转时在临界点出现跳变时的采样信号,在位置出现跳变时,信号也随即发生变化。两幅图幅值连续,都没有因为外界干扰出现信号丢失等现象。可以看到该解码控制电路能够很好地完成对电机位置的精确检测,稳定性好。
3 结论
此方案已经在步进凝视扫描成像平台的运动控制中得到了良好的应用。
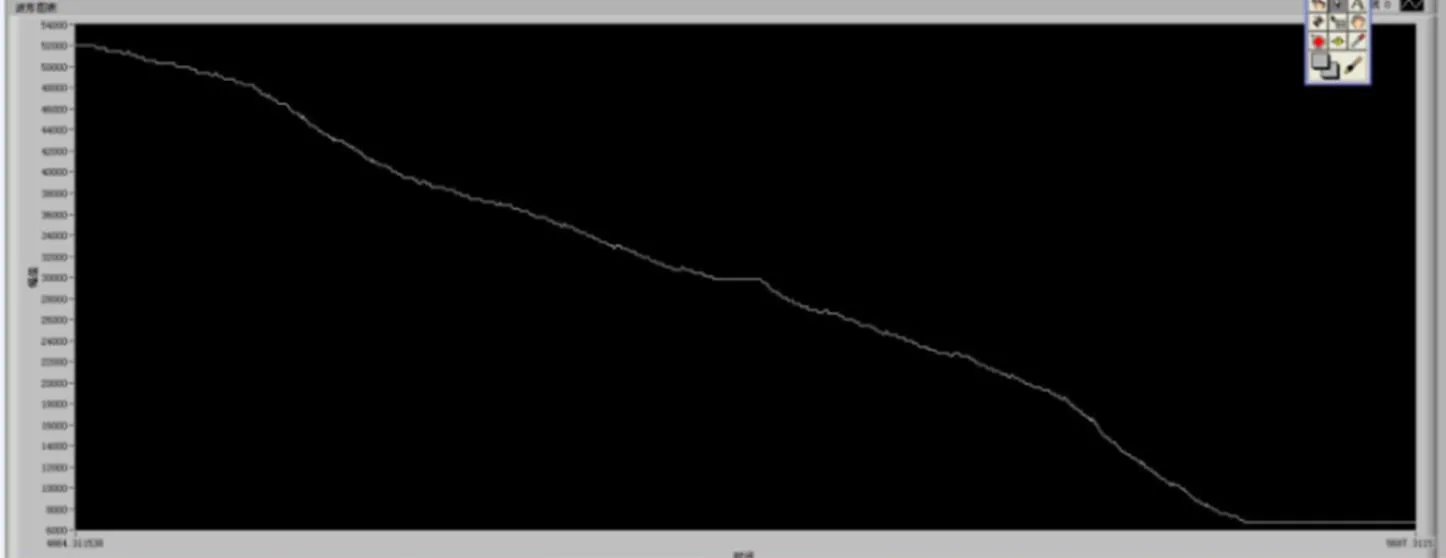
图6 旋变采样图1
Fig.6 A sampling map of resolver No.1
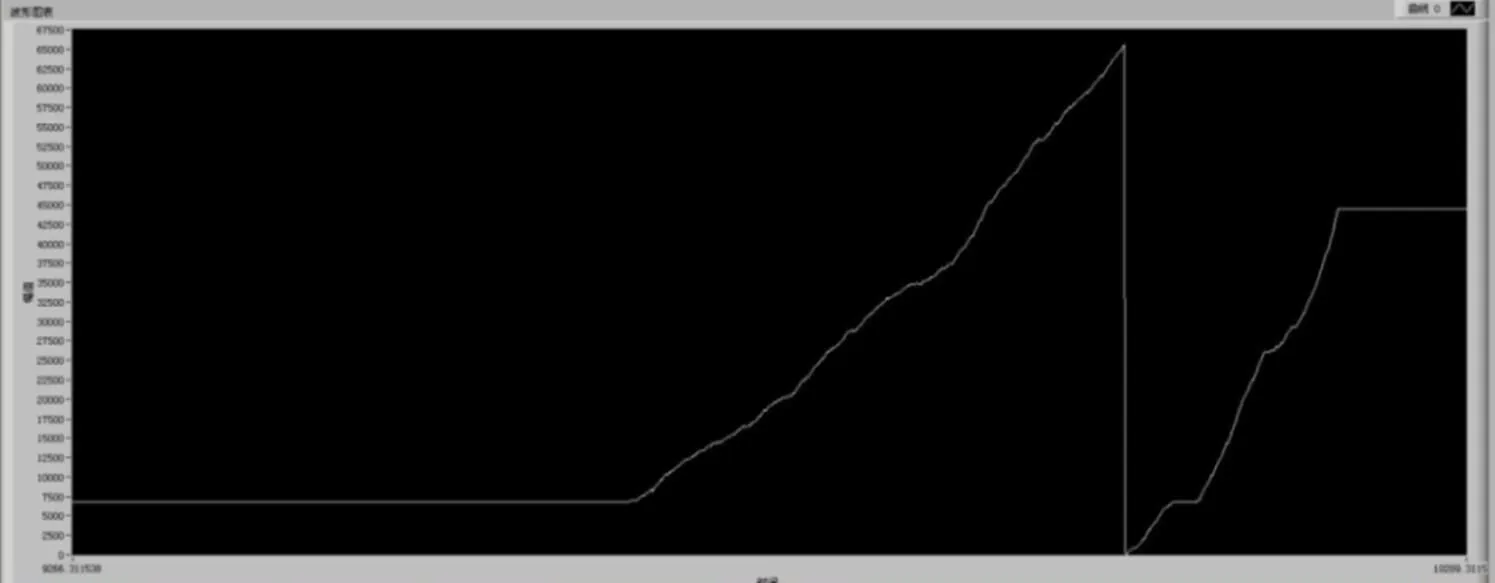
图7 旋变采样图2
该系统能够精确地检测机的位置信号,继而可以实现电机的多闭环控制。而该硬件电路小巧可靠,与整个系统的通信方式灵活,也容易实现。
[1] 陈洁, 张若岚. 应用于红外搜索跟踪和态势感知系统的全景成像技术[J]. 红外技术, 2016, 38(4): 269-279.
CHEN Jie, ZHANG Ruolan. Panoramic imaging technology Applied in IRST and Status Awareness System[J]., 2016, 38(4): 269-279.
[2] 张洪润, 张亚凡. 传感器原理及应用[M]. 北京: 清华大学出版社, 2008.
ZHANG Hongrun, ZHANG Yafan.[M]. Beijing:Tsinghua University Press, 2008.
[3] 罗诗风, 夏明霞, 王军, 等. 一种基于旋转变压器的通用数字式轴角传感器及其误差补偿技术[J]. 机床与液压, 2013, 40(23): 93-96.
LUO Shifeng, XIA Mingxia, WANG Jun, et al. A common digital angle sensor based on resolver and error compensation technology[J]., 2013, 40(23): 93-96.
[4] 李伟伟. 旋转变压器轴角数字变换技术(一)综述[J]. 伺服控制, 2015, 7(5): 72-76.
LI Wei-wei. Summarize-Angle digital conversion technology of the resolvers[J]., 2015, 7(5): 72-76.
[5] Analog Devices Inc.AD2S1210 datasheet[Z].U.S.A: ADI, 2010.
[6] 李晓青, 陈华泰, 董海鹰. 旋转变压器/数字转换器在直流电机控制系统中的应用研究[J]. 电气传动自动化, 2013, 35(5): 1-4.
LI Xiaoqiug, CHEN Huatai, DONG Haiying. Application and research on a novel resolver-digital converter in DC motor control system[J]., 2013, 35(5): 1-4.
[7] 李岩, 于爽, 夏加宽, 等. 一种新型磁阻式正余弦旋转变压器解码方法[J].电气工程学报, 2015, 10(9): 41-47.
LI Yan, YUShuang, XIAJia-kuan, et al. A new decoding method for reluctance Cosine Resolver[J]., 2015, 10(9): 41-47.
[8] Texas Instruments.THS4062 Datasheet[Z].U.S.A: TI, 2014.
[9] 邹旭. 旋转变压器信号处理与设计[D]. 武汉: 华中科技大学, 2008: 15-20.
ZOU Xu. The Solution for Obtaining Resolver Angular Position and Speed[D]. Wuhan: HuazhongUniversity of Science & Technology, 2008: 15-20.
[10] Microchip Technology Inc. dsPIC30F6011A/6012A/6013A/ 6014AData-Sheet[Z]. U.S.A: Microchip, 2005.
[11] 王玉珏, 翁浩宇, 张海勇, 等. 基于AD2S1210的电机解码系统设计[J]. 电子技术应用, 2013, 39(2): 48-51.
WANG Yujue, WENG Haoyu, ZHANG Haiyong, et al. Design of motor decode system based on AD2S1210[J]., 2013, 39(2): 48-51.
Design of Resolver Decoding Circuit Based on AD2S1210
LIU Yunyi1,2,ZHENG Jie1,2,LI Yan1,2,TIAN Guiping1,2,WEI Wei1,2,CHEN Jie1,2
(1,650223,;2.,650223,)
This paper introduces a resolver decoding circuit based on the position detection of a step-stare panoramic imaging platform. Through the use of AD2S1210(revolving transformer/digital converting IC produced by ADI), to decode the resolver J78XFS009, a decoding circuit is designed. The design includes the basic working of ADS2S1210, the interface circuit and the connecting circuit between the micro-controller and resolver and so on. The whole circuit has the advantages of simple structure, high reliability, working stability, high precision and better noise immunity, etc. It can be used under harsh environments, so it has high value of practical use. The experimental results show that the circuit can detect the position signals of the DC motor accurately, so it can contribute to achieve a more precise closed loop control of DC motors.
resolver transformer,AD2S1210,resolver-digital converter,circuit design
TM31
A
1001-8891(2016)12-1042-05
2016-03-06;
2016-05-06.
刘芸邑(1991-),女,江苏人,硕士研究生,主要研究方向:伺服控制技术。E-mail:liuyunyi627@163.com。