高地隙自走式植保机械喷杆系统结构优化与研究
2016-03-24黄聪会马洪亮江光华魏淑艳何俊达
黄聪会,马洪亮,江光华,魏淑艳,何俊达
(1.河北农业大学 机电工程学院,河北 保定 071001;2.河北省农机修造服务总站,石家庄 050011)
高地隙自走式植保机械喷杆系统结构优化与研究
黄聪会1,马洪亮1,江光华2,魏淑艳1,何俊达1
(1.河北农业大学 机电工程学院,河北 保定071001;2.河北省农机修造服务总站,石家庄050011)
摘要:我国植保机械相对国外较落后,存在农药利用率低、劳动强度大及农民中毒现象频发等问题。为此,对高地隙自走式植保机械喷杆系统结构做了简要叙述,并对喷杆展开机构进行了自由度分析计算及运动学理论分析;同时,运用ADAMS仿真软件对喷杆展开机构进行了运动学仿真分析,提出了将液压缸替换为电推杆的优化方案,并对优化后的方案进行了运动学仿真分析。结果表明:优化后的展开性能明显提高,这一改进为自走式植保机械的进一步发展提供了依据。
关键词:植保机械;高地隙;自走式;喷杆;展开机构;结构优化
0引言
河北省是小麦种植大省之一,小麦的丰欠情况与农民的切身利益息息相关。作为主要的粮食作物,小麦在生产过程中经常会遭受病、虫、草害侵害,能否做好小麦病、虫、草害的防治工作对河北省农村社会经济的发展十分重要。因此,必须采取有效的措施进行病、虫、草害的相关防治,以确保丰产、增收。病、虫、草害的防治方法包括农业技术防治、生物防治、物理和机械防治及化学防治。其中,化学农药防治是消灭病虫害有力武器,能在短期内消灭或控制病、虫、草害对植物的侵害,且效果好、作用快、不受地区或季节的限制。而我国传统的施药作业通常采用人工背负小型手动喷雾器或半机械化方式喷药防治,不仅劳动强度大、工作效率低,农民的人身安全问题也出现了很大的隐患[1-2]。
近年来,劳动强度大、工作效率低的手动喷雾器逐步被机动喷雾机替代,植保机械开始向自动化方向发展。为此,针对河北省小麦各个生长时期受病虫害侵害的现状及河北省小麦种植行距的大小、植株高低、地块大小现状,研制高地隙自走式植保机具迫在眉睫,且其发展也具有广阔的前景。相比其它自走式植保机械,高地隙自走式植保机械具有底盘离地间隙高、通过性好及适应性强等特点,能满足小麦各个时期病、虫、草害的防治工作。
本文重点对高地隙自走式植保机具的喷杆展开机构进行了仿真分析与优化,对下一步研制经济、方便、高效的植保机具具有重要意义。
1喷杆系统结构及工作原理
1.1工作原理
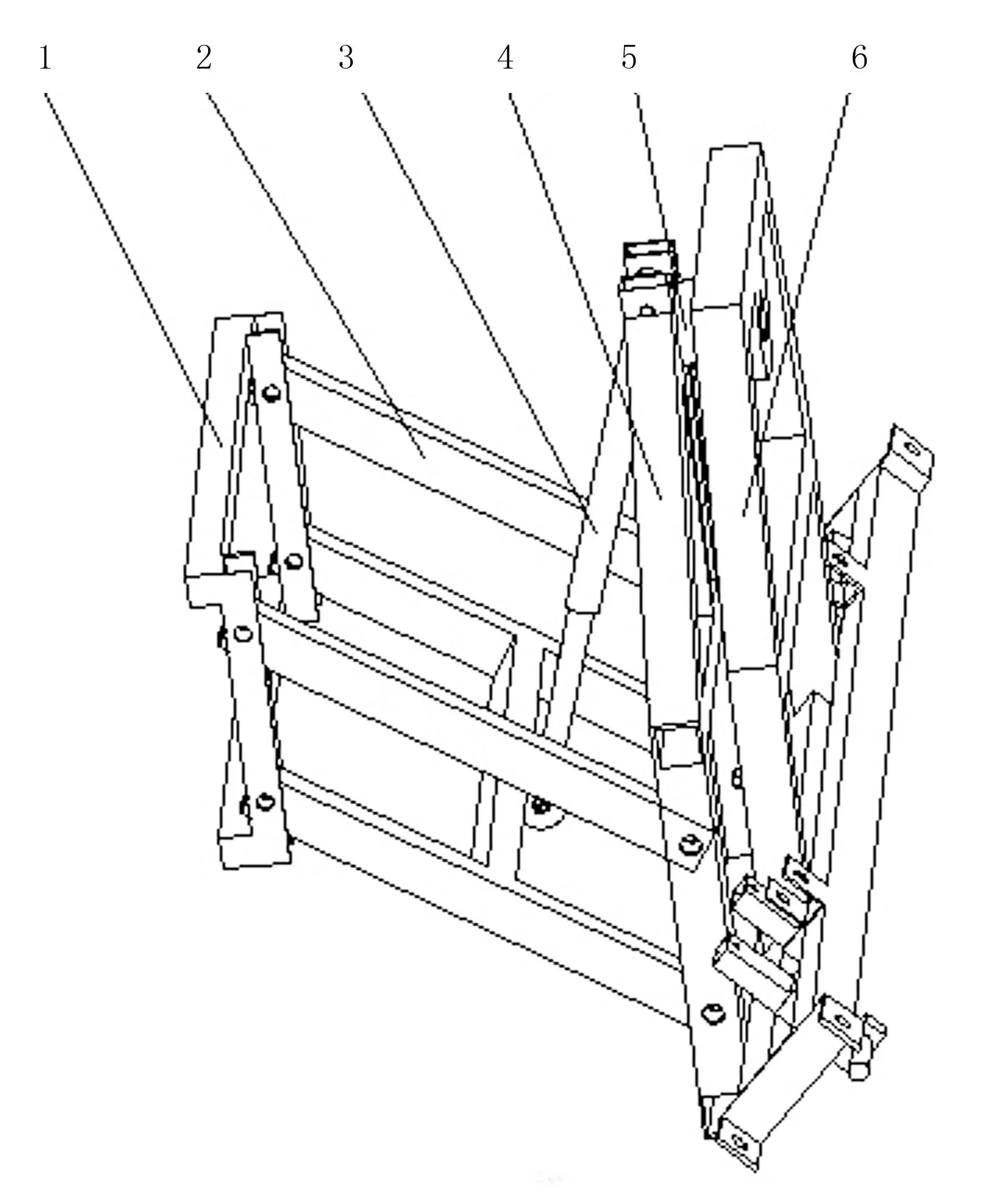
喷杆展开机构如图1所示。

1.中间支撑架 2.双头螺杆 3.液压缸 4.三角支杆
由图1可以看出:该喷杆展开机构由中间支撑架、双头螺杆、液压缸、三角支杆、第1展开喷杆、第2展开喷杆、上拉杆及连杆双头拉杆组成。第1展开喷杆与第2展开喷杆的展开、收回运动由液压缸驱动。液压缸在推动第1展开喷杆展开的同时带动上拉杆、连杆、及双头拉杆转动,双头拉杆带动第2展开喷杆转动展开。图1中,双头螺杆和双头拉杆的长度均可调节,通过调节双头螺杆和双头拉杆的长度实现第1展开喷杆、第2展开喷杆与中间支撑架的调平操作。中间支撑架与第1展开喷杆的铰链连接处及第1展开喷杆与第2展开喷杆的铰链连接处均设计了限位挡块,用来防止喷杆展开过位。该喷杆折叠后第1展开喷杆与第2展开喷杆与水平地面成45°角,固定在车身两侧,且喷杆展开机构为5段式,相较3段式喷杆在有限的空间内明显增加了喷幅。
1.2喷杆升降机构
普通的提升机构会严重影响行走系统的离地间隙,会导致喷雾机在作业过程中对高秆作物的破坏程度增大,因此设计既不影响整机的离地间隙又能完成喷杆转开系统升降的机构非常有必要。此喷杆系统采用平行四边形升降机构,主要由升降连杆、升降液压缸、车架和连接架组成,如图2所示。此平行四边形升降机构既可以保证喷雾机在作业过程的离地间隙,又能实现喷杆展开系统在竖直方向的升降,同时能保证喷头在升降过程的任意位置始终向下。
1.车架 2.升降连杆 3.升降液压缸
1.3喷杆系统自平衡机构
如果将喷杆系统与车身固定连接,喷雾机在田间作业过程中由于田间地面的不平整,会导致展幅较长的喷杆触地或折断。因此,采用图2所示的喷杆系统自平衡机构,将连接架与喷杆中间支架通过轴承连接,可以使喷杆系统不管车身处于何种状态始终与水平面平行,有效解决了喷杆系统的平衡问题。
2展开机构分析
2.1自由度分析
图3为喷杆展开机构的运动简图。机构自由度的计算公式为
F=3n-(2pl+ph)
(1)
式中n—活动构件数;
pl—低副数;
ph—高副数。

图3 喷杆机构运动简图
由图3可以看出:该机构的活动构件数为7,低副数为10,高副数为0,因此该机构自由度为F=3×7-(2×10+0)=1。在机构的原动件与机架相连的情况下,只有满足原动件数等于自由度数F,喷杆展开机构的运动才能完全确定。该机构的原动件只有液压缸满足上述条件,因此喷杆展开机构具有确定的运动。
2.2理论分析
喷杆展开机构的初始位置为第1展开喷杆与中间支撑架喷杆相互垂直(即杆AI与AO重合)时。此时液压缸的初始长度为L0,转动副A处,φ0+φ1的初始角度为0,喷杆机构运动简图如图3所示。根据图3,有
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
φ10=π-φ7-φ8
(14)
其中,各个夹角与杆长如图3所示;V为液压缸推开速度;t为推开时间。对式(2)~(14)进行整理计算,即可得出液压缸速度与第1展开喷杆的展开角度及与第2展开喷杆的展开角度之间的关系,进一步求导,就可得到液压缸速度与第1展开喷杆和第2展开喷杆角速度、角加速度之间的关系。由于篇数有限,不在此进行详细的整理计算。
3模型仿真及结构优化
3.1ADAMS简介
ADAMS是由美国Mechanical Dynamics Inc公司研制的一款机械系统动力学仿真分析软件,其求解器采用常用的多刚体动力学理论中的拉格朗日方程方法,建立系统动力学方程,可对虚拟机械系统进行静力学、运动学和动力学分析,并输出位移、速度、加速度和反作用力曲线[3]。
3.2几何模型的建立及导入
为了简化模型、减小计算量,仅对喷杆一侧展开机构进行仿真分析。由于在ADAMS中直接进行模型的建立比较困难,因此首先在三维建模软件Pro/E 中建立系统简化模型的各个组件,在装配环境下对其进行装配,以确定各组件间的相对位置,然后把装配体文件以parasolid(*.x_t)格式保存副本;打开ADAMS软件并以相应的格式导入刚才保存的文件,就可以将喷杆展开机构的三维模型导入到ADMAS软件中。
3.3添加约束、材料和载荷
利用ADMAS建立机械系统仿真模型时,系统中的构件与地面或构件与构件之间存在着运动副的连接。因此,首先需将导入的喷杆模型,根据实际情况添加运动副。在液压缸与杠杆之间添加移动副,中间支撑架与ground添加固定连接,其余各活动构件之间添加转动副;然后对液压缸添加移动驱动,速度方向为液压缸杆运动的方向;对整个喷杆展开机构添加重力,方向沿Y轴负方向。为各活动构件添加相应的材料:steel,第1展开喷杆与第2展开喷杆之间添加限位接触连接,第1展开喷杆与中间支撑架之间添加相应的限位接触连接,如图4所示。
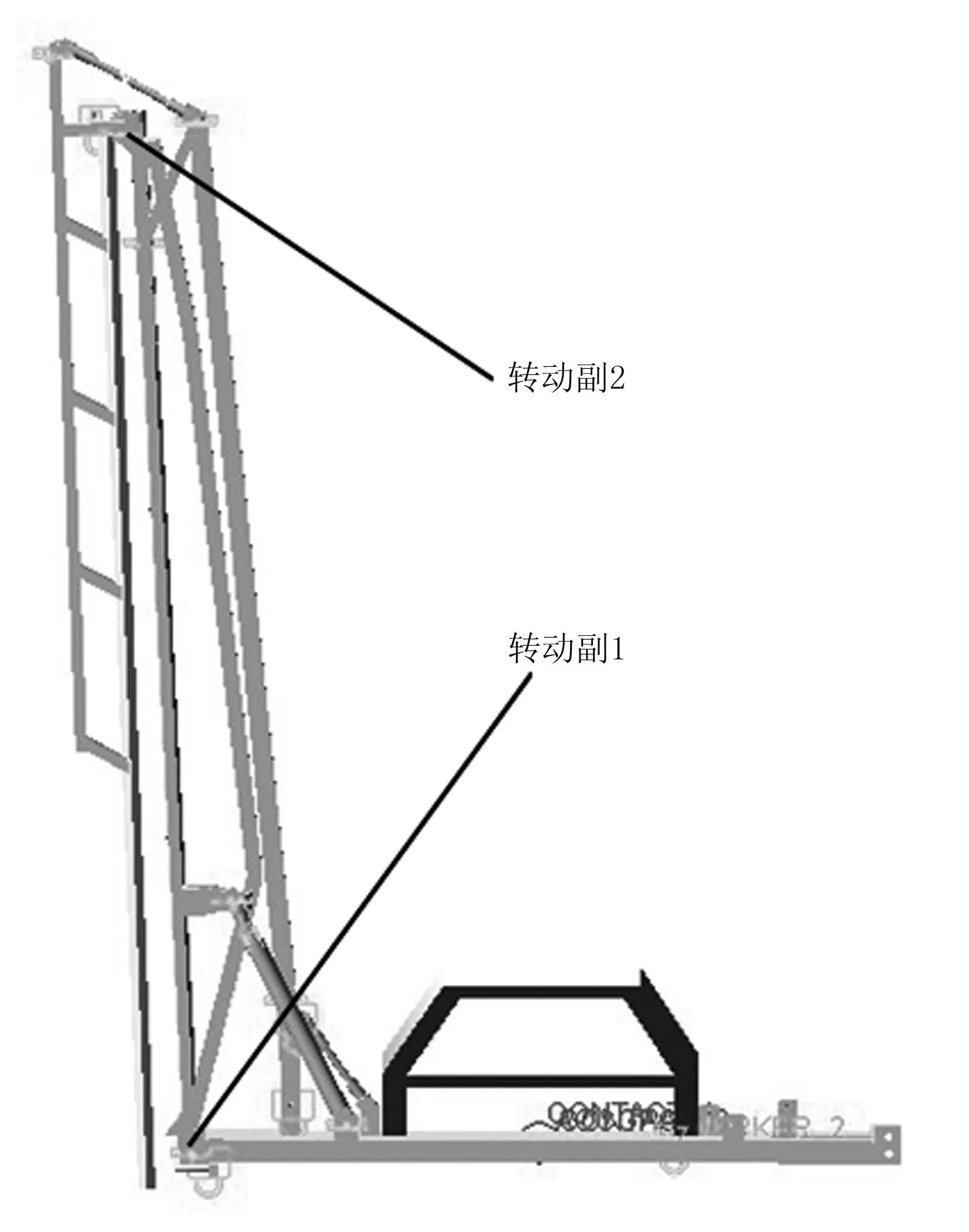
图4 机构简化仿真模型
3.4运动仿真
在液压缸的移动副处添加移动驱动,令移动速度为20mm/s,对喷杆展开机构进行运动仿真。喷杆机构在展开过程中,转动副1与转动副2处的角加速度、角速度如图5、图6所示。由图5、图6可知:喷杆在即将完全展开时,角加速度、角速度瞬间增大,在喷杆机构展开的最后转动副1的角速度达到0.22rad/s,角加速度0.14rad/s2;转动副2的角速度达到0.52rad/s,角加速度为0.68rad/s2。由此可知:喷杆机构在展开过程的最后,喷杆与限位挡块的碰撞力会极大。这将带来喷杆在即将展开时振动明显的问题,同时会对喷杆机构的使用寿命带来一定的影响。

图5 转动副1处角速度、角加速度曲线
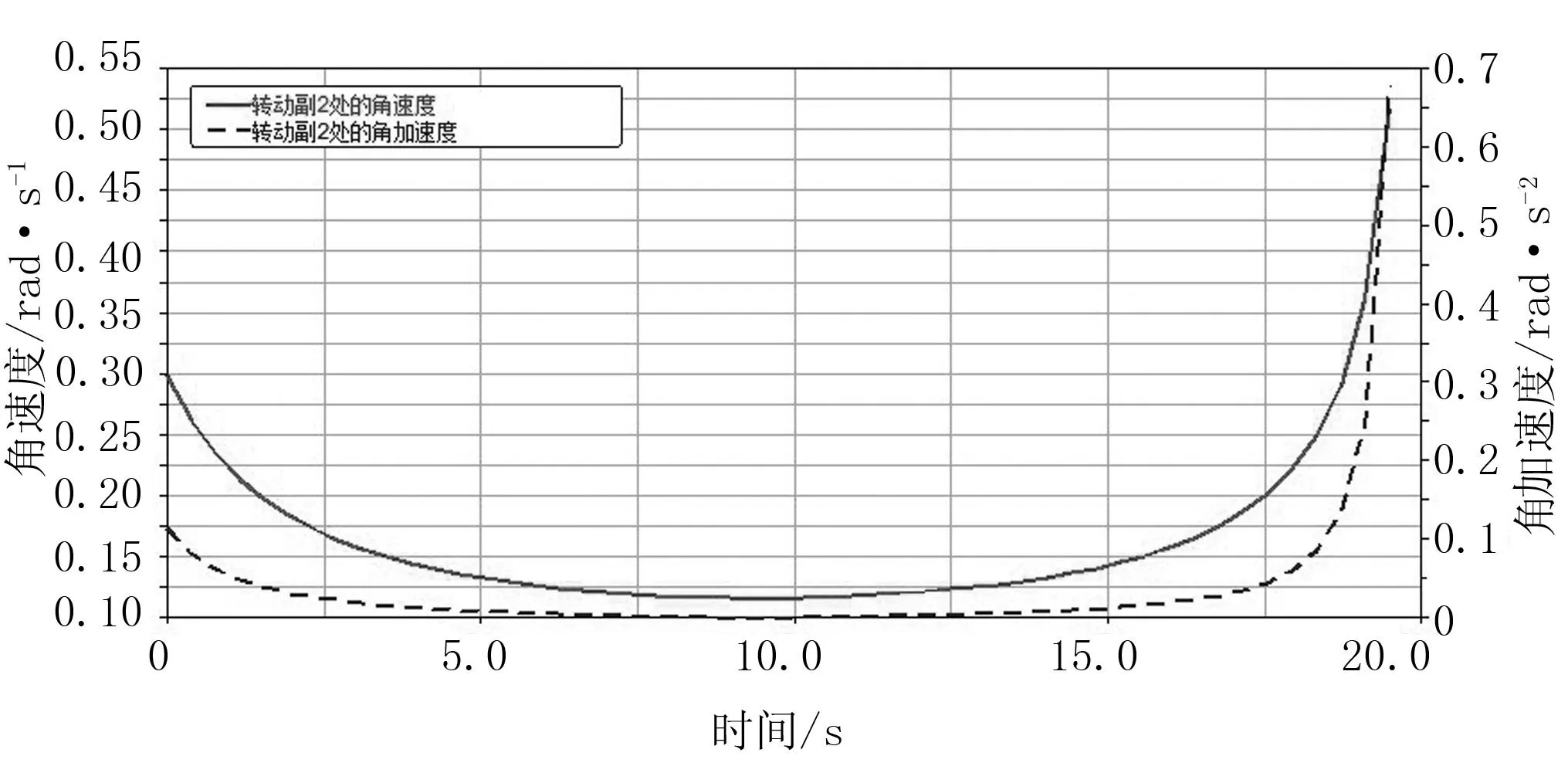
图6 转动副2处角速度、角加速度曲线
4优化方案
针对喷杆展开过程中出现的喷杆与限位挡块碰撞力极大,以及在喷杆展开机构即将完全展开过程中喷杆展开速度、加速度急剧增大等问题,提出将液压缸替换为电推杆同时将限位挡块替换为限位开关的方案,通过控制电推杆的速度来实现喷杆机构的平稳展开。电推杆的转动速度容易控制,可以实现喷杆定位停止且平稳展开,提高喷杆的使用寿命。
针对优化前喷杆在即将完全展开时角加速度、角速度瞬间增大的问题,初步对展开速度进行调整。即将电推杆先是以20mm/s的速度匀速运动,16s之后速度由20mm/s匀减速到0mm/s。设定电推杆的速度如图7所示。添加移动驱动,驱动类型为速度。速度函数为STEP(time,0,-20,16,-20)+STEP(time,16,-20,23,0)。

图7 电推杆速度曲线
改进后喷杆的展开情况如图8、图9所示。其中,转动副1处的角速度和角加速度的最大值都出现在喷杆机构即将展开时,角速度最大为0.11rad/s,角加速度最大为0.032rad/s2;转动副2处的角速度和角加速度的峰值都出现在喷杆机构刚刚展开时。为了与优化之前作对比,测得喷杆机构在即将展开时转动副2的最大角速度为在0.17rad/s,角加速度为0.06rad/s2。因此,优化后喷杆机构的展开性能明显提高。

图8 优化后转动副1处角速度、角加速度曲线
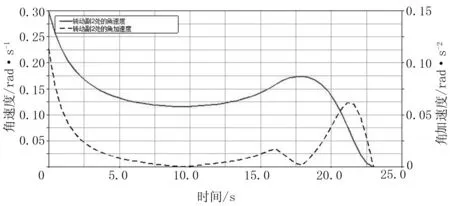
图9 优化后转动副2处角速度、角加速度曲线
5结论
1)本文所述的喷杆展开机构可以实现自动展开,提高了操作的便捷性。
2)本文所述的喷杆升降机构既可以有效保证施药过程中的离地间隙,又能够实现喷杆展开系统在竖直方向的升降,保证喷头方向始终朝下;且所述的喷杆系统具有自平衡机构,有效解决了喷杆系统的平衡问题。
3)对喷杆展开机构进行了自由度分析,通过分析可知:该机构的原动件数等于其自由度数,满足具有确定运动的条件,同时,对其进行了简单的运动学理论分析。
4)通过对喷杆展开机构的仿真,分析了喷杆在展开过程中存在的一些问题,为喷杆改进方案提供了思路,为喷杆机构的进一步优化提供了理论依据。
5)提出了将液压缸替换为电推杆的优化方案,有利于喷杆机构的平稳展开和提高喷杆的使用寿命。
参考文献:
[1]郑文钟,应霞芳.我国植保机械和旋药技术的现状、问题及对策[J].农机化研究,2008(5):219-221.
[2]刘丰乐,张晓辉,马伟伟,等.国外大型植保机械及施药技术发展现状[J].农机化研究,2010,32(3):246-248.
[3]郭卫东. 虚拟样机技术与ADAMS 应用实例教程[M].北京: 北京航空航天大学出版社, 2008.
[4]王蒙.植保机械学[M].北京:机械工业出版社,1990.
[5]朱月秋,陈小兵.浅谈我国植保机械的现状与发展机遇[J].农业装备,2004(3):9-11.
[6]刘建,吕新民,党革荣,等.植保机械的研究现状及发展趋势[J].西北农林科技大学学报:自然科学版,2003,31(10):202-204.
[7]杨学军,严荷荣.植保机械的研究现状及发展趋势[J].农业机械学报,2002,33(6):129-131,137.
[8]周海燕,刘树民,杨学军,等.大田蔬菜高地隙自走式喷杆喷雾机的研制[J].农机化研究,2011,33(7) :70-72.
[9]中国农业机械化科学研究院.农业机械设计手册[K].北京: 机械工业出版社,1988.
[10]宋坚利,何雄奎,曾爱军,等.罩盖喷杆喷雾机的设计与防飘试验 [J].农业机械学报,1999,38(8):74-77.
[11]何雄奎,曾爱军,刘亚佳 ,等.水田风送低量喷杆喷雾机设计及其参数研究[J].农业工程学报,2005,21(9):76-79.
[12]苗春龙,陶曼丽,安占忠.新型移动式折叠喷雾机的研究[J].农业装备与车辆工程, 2000(3):33-35.
[13]蔡晨,薛新宇,丁素明,等.小型助力推车式果园喷雾机的研制[J].中国农机化学报, 2013, 34(1):134-136.
[14]张勋,李智,孔晓军. 新世纪田间作业机械化发展特点与热点[J].农机化研究,2000(1):5-12.
[15]赵明宇,王英姿,邱立春,等.我国植保机械的使用现状及发展趋势[J].中国农机化,2004(3):1-3.
[16]温浩军,康建明.兵团植保机械的现状及发展方向 [J]. 新疆农垦科技,2010(2):84-85.
[17]耿爱军,李法德.国内外植保机械及植保技术研究现状 [J].农机化研究,2007(4):189-191.
The Structure Optimization and Research of the Spray Bar System Mounted on the Highland Clearance Self-propelled Plant Protection Machinery
Huang Conghui1,Ma Hongliang1,Jiang Guanghua2,Wei Shuyan1,He Junda1
(1.College of Mechanical and Electrical Engineering, Agricultural University of Hebei, Baoding 071001, China; 2. Hebei Province Agricultural Machinery Repair Service Station, Shijiazhuang 050011, China)
Abstract:The plant protection machinery of China is relatively backward compared to the foreign plant protection machinery. There are the problems of low pesticide use, labor-intensive, poisoning of farmers frequently and so on. In this paper, highland clearance for plant protection machinery self-propelled spray bar system structure is described briefly, and the degree of freedom of Spray bar deployment mechanism and the kinematics theory are analyzed and calculated. The kinematics simulation analysis is carried out by simulation software of ADAMS. Proposing the optimization program that replacing the hydraulic cylinder with electric putter. Finally carry out the kinematics simulation analysis to the optimized program. The performance of expand has improved significantly. This improvement provides foundation for the further development of self-propelled plant protection machinery.
Key words:plant protection machine; highland clearance; self-propelled; spray bar; deployment mechanism; structure optimization
文章编号:1003-188X(2016)02-0049-05
中图分类号:S491
文献标识码:A
作者简介:黄聪会(1990-),女,石家庄人,硕士研究生,(E-mail)1124944796@qq.com。通讯作者:马洪亮(1965-),男,河北青县人,副教授,硕士生导师,(E-mail)mahongliang0312@126.com。
基金项目:河北省现代农业产业技术体系小麦创新团队建设项目(2013-2017)
收稿日期:2015-03-07
