基于模糊逻辑控制的自主导航采摘机器人避障设计
2016-03-23鲁丽萍
鲁丽萍,葛 聪
( 1.河南财政税务高等专科学校,郑州 450002;2.河南理工大学 万方科技学院,郑州 451400 )
基于模糊逻辑控制的自主导航采摘机器人避障设计
鲁丽萍1,葛聪2
( 1.河南财政税务高等专科学校,郑州450002;2.河南理工大学 万方科技学院,郑州451400 )
摘要:为了提高采摘机器人自主导航的环境适应能力,提出了一种基于改进的遗传算法的模糊学习逻辑控制方法,提高了机器人路径规划的能力和效率,缩短了路径规划所用时间。该方法以传感器测得的障碍物距离、轮转速和目标地点方向作为输入量,左右驱动轮的速比作为输出量,控制机器人的移动路径和方向。为了使机器人规划的路径尽量短,达到节能的目的,引入了改进的遗传算法,使用修正项对遗传算法进行改进,建立了适应度函数的基本模型。最后,对采摘机器人的性能进行了测试,通过测试发现:机器人可以成功地躲避障碍物,且能够完成最短路径规划,规划反应时间短、可靠性高。
关键词:采摘机器人;模糊控制;遗传算法;移动路径;修正项;适应度
0引言
自主导航能力是提高采摘机器人智能化和自动化水平的基础。理想的采摘机器人应当同时具备几种能力,当机器人处于未知环境中时,机器人面对复杂动态变化的环境,可以通过探索达到期望的目标位置,同时消耗能量少、移动路径短、所用时间少。传统的机器人路径规划基于感知-建模-规划-动作,该方法的问题在于不能准确地建立环境的地图模型,对环境的适应能力较差。为此,提出了一种基于改进的遗传算法和模糊逻辑控制的机器人自主导航学习算法,实现了机器人的自主避障和路径导航功能。
1自主导航采摘机器人功能和总体设计
单片机结构简单,控制方便、快捷,具有强大的寻址操控能力和移动控制能力,并且价格低廉。因此,将其作为整个系统的控制核心,并利用算法编程对其控制功能进行改进,其总体功能设计如图1所示。
为了实现采摘机器人的自主导航,考虑传感器、驱动电机和显示器等多种因素,采用单片机P89C51RA对机器人进行控制,主要控制功能包括红外遥控、里程显示、障碍检测、行驶路线显示、避开障碍和指示灯等。

图1 自主导行采摘机器人功能设计
图2为机器人躲避障碍物的主控程序。采摘机器人采用履带式底盘结构,当遇到前方有障碍物时,利用单片机程序控制,可以自主避开障碍物。如果左前方有障碍物,机器人后退左拐,并进行后退的步伐,然后机器人右拐,检测I/O口,并进入switch循环语句;当无障碍物时,机器人左拐,前行并记下步伐后再右拐,成功躲避障碍物后返回主程序。

图2 机器人躲避障碍物自主导航主控程序
2基于模糊逻辑控制的机器人导航设计
为了实现采摘机器人的自主导航,将机器人设计成履带式,驱动轮利用驱动电机和减速器进行驱动;驱动轮和履带链之间进行啮合,当驱动力大于行驶阻力时,支重轮在履带上表面滚动,使机器人向前行驶。
图3为采摘机器人的履带式底盘结构示意图。为了计算方便,将机器人表示为椭圆形的移动机器人形式,其内部坐标如图4所示。在机器人移动的过程中,内部坐标系与实际坐标系进行不断地转换,从而实现机器人的实时定位和自主导航。机器人在运动过程中的实际坐标如图5所示。
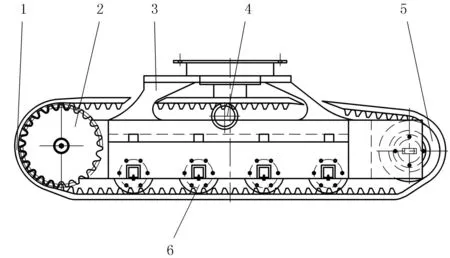
1.履带 2.驱动轮 3.机架 4.拖带轮 5.导向轮 6.支重轮
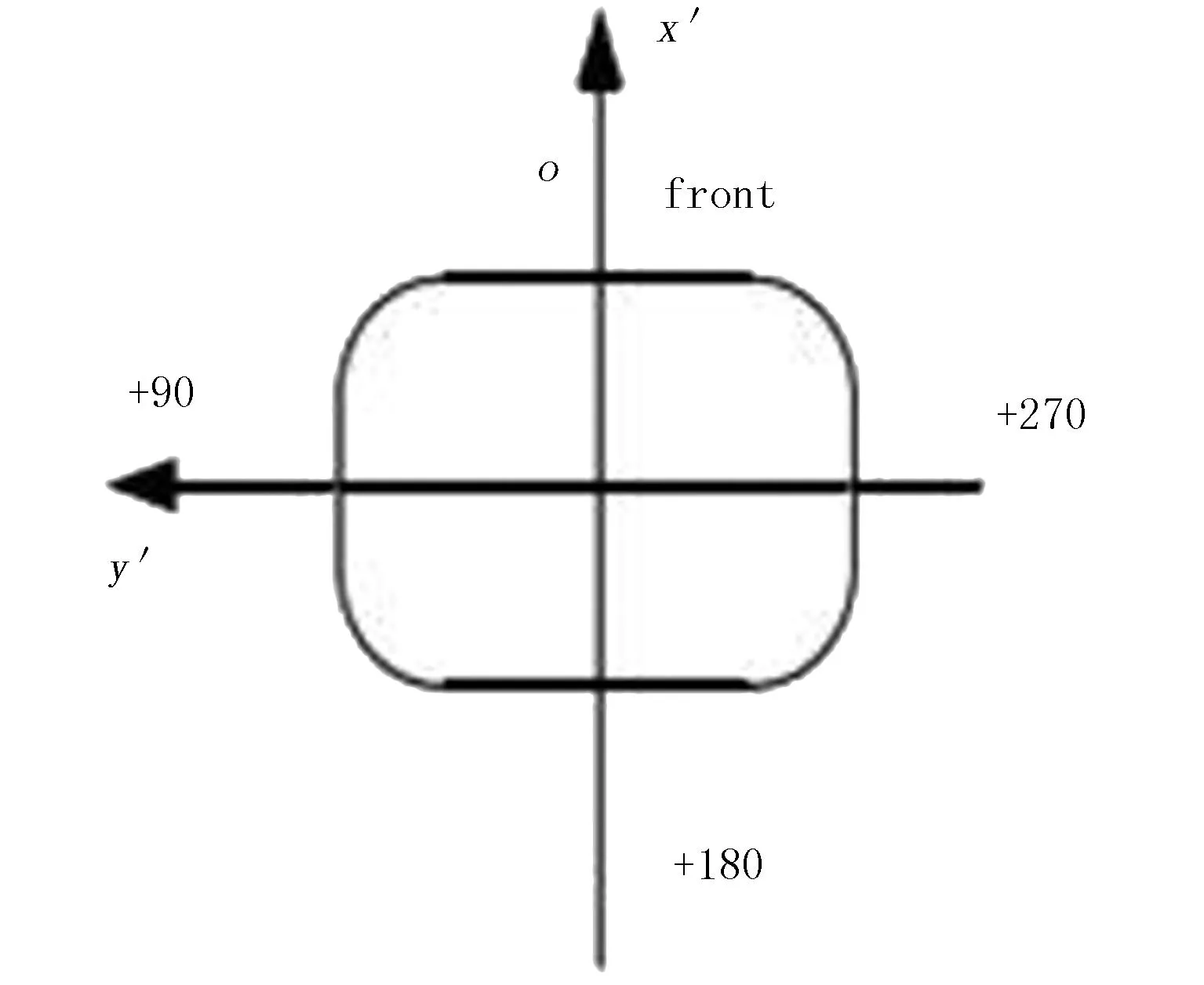
图4 采摘机器人内部坐标

图5 采摘机器人实际坐标
在采摘机器人实际运动过程中,坐标系的变换不是简单的坐标加减,坐标系与X轴有夹角,假设夹角为α,(x′,y′)表示某点在局部坐标系中的坐标值,而在全局坐标系中的坐标为(x0,y0)。根据三角关系变换可得
(1)
该点在绝对坐标系中的坐标值为
(2)
(3)
这样就可以完成局部坐标和全局坐标的变换。假设采摘机器人左轮和右轮的角速度分别为wl、wr,则其速度分别为
(4)
(5)
其中,R表示驱动轮的半径,D表示两轮间的距离。只要调整两驱动轮的转速,就可以实现其方向的控制。假设两轮的转速比为kp,则得
(6)
调整kp的值,可以实现采摘机器人的直线行驶、左转和右转。为了实现算法功能,可以引入增量式旋转编码器来改变机器人的运动状态。假设在第k个采样周期内其计算脉冲分别为mk和nk,则机器人的控制模型可以写成
(7)
其中,xk+1、yk+1、θk+1分别表示是第k+1个周期时机器人的位移和方向,Mp表示机器人驱动轮转动1圈时的脉冲数,Δt表示采样时间。为了提高机器人的控制精度,需要引入相关计算算法。
本次研究主要采用模糊逻辑控制器和改进的遗传算法对机器人进行控制,以传感器测得的障碍物距离、轮转速和目标地点方向作为输入量,左右驱动轮的速比作为输出量。假设采摘机器人距离左、右和前方障碍物的距离分别为LD、FD、RD,将距离模糊语言的变量设定为{NEAR,FAR},目标方向的模糊语言变量设置为{LEFT,FRONT,RIGHT},其距离隶属函数如图6所示。
对于采摘机器人模糊逻辑控制的关键是构造正确的隶属函数,本次设计中将隶属度函数定义为对称的三角函数形状,并将模糊进行对称分割,其效果如图6所示,目标方向的隶属函数如图7所示。

图6 距离隶属度函数
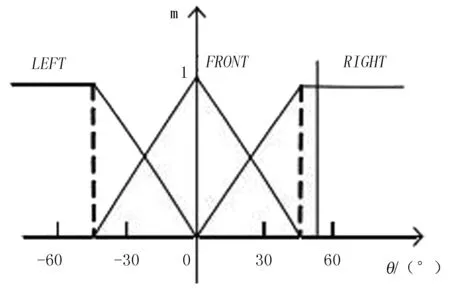
图7 目标方向隶属度函数

(8)
其中,g(α,n,…,μ)表示能量函数,其值和转弯半径、摩擦因数等有关;dist表示对路径长度的评价函数,其表达式为
(9)
其中,xk表示第k个连接点,n表示通过栅格数的总和。采摘机器人路径规划的方法主要有2种,螺旋收缩式路径规划方法如图8所示。

图8 螺旋收缩式路径规划方法
对于采摘机器人路径规划方法主要有两种:一是螺旋收缩式的规划方法;二是“之”字型路径规划方法。螺旋收缩式的路径规划方法是机器人在外围行走1圈,然后往中心移动再行走1圈,如此往复,最后完成整个区域的覆盖。
图9表示“之”字型路径规划方法。由于果蔬一般都是按行种植,这种路径规划方法是采摘机器人常用的方法,利用该模型可以将障碍物外的区域分解成互不重叠的单元,机器人利用往返运动实现单元的全覆盖。

图9 “之”字型路径规划方法
3自主导航采摘机器人性能测试
为了验证本次研究设计的自主导航机器人的性能,对其采摘作业过程进行了测试,主要测试机器人躲避障碍物和自主规划路径的能力。其作业测试过程的场景如图10所示。

图10 自主导航机器人性能测试
机器人行驶过程中,在其行驶路径放置了障碍物,分别利用改进的遗传算法和模糊控制算法对其避障功能进行了测试,得到了如图11所示的测试结果。
由仿真测试结果可看出:改进的遗传算法和模糊控制算法都可以成功地躲避障碍物,并且遗传算法比模糊控制算法的路径要短。
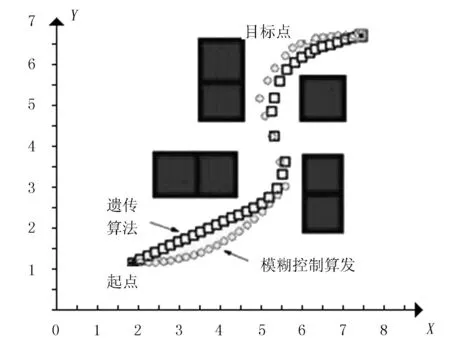
图11 避障功能仿真测试结果
图12为采摘机器人自主规划路径的结果图。当遇到黑色障碍物时,综合利用遗传和模糊控制算法两种方法,采用“之”字型路径规划方案。通过测试,采摘机器人可以成功的得到最优化路径。
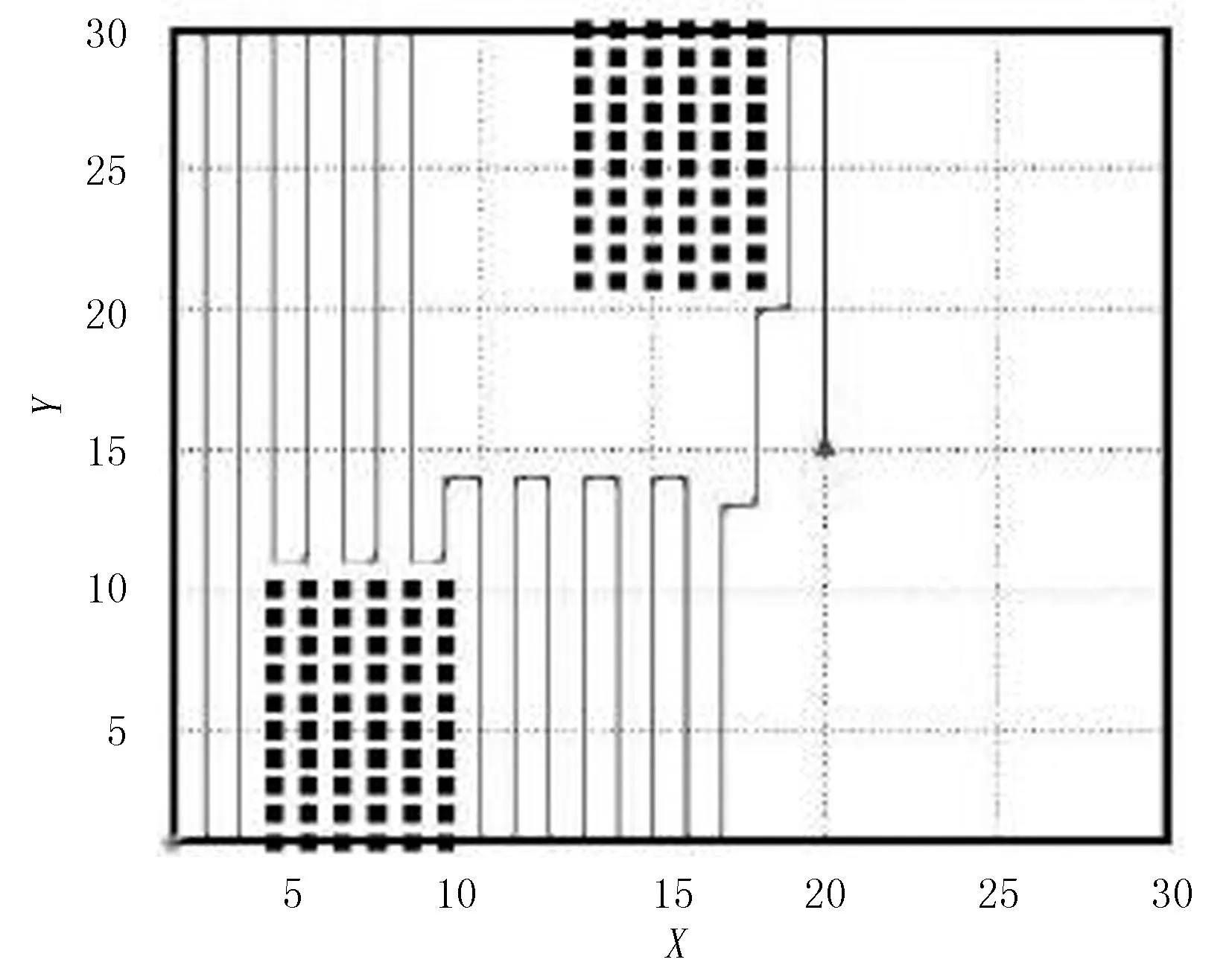
图12 机器人路径规划结果
图13为采摘机器人的路径规划时间测算曲线图。由图13可以看出:随着障碍物数目的增多,路径规划时间逐渐升高;但从总体数据可以看出,采摘机器人路径规划系统能够快速的得到路径的最优解,响应迅速,可靠性高。

图13 路径规划时间测算
4结论
1)依据改进的遗传算法和模糊逻辑控制方法,对采摘机器人的导航系统进行了改进,建立了路径规划的模糊隶属度和遗传自适应函数,提高了机器人避障能力和自主路径规划能力,缩短了路径规划所用时间。
2)对采摘机器人的性能进行了测试,测试项目主要包括机器人的避障能力和路径自主规划能力。通过测试发现:机器人利用模糊逻辑控制算法和遗传算法都可以成功地躲避障碍物,遗传算法规划路径较短,综合利用这两种方法可以成功的完成“之”字型路径规划,规划时间短,可靠性高,为采摘机器人的设计提供了较有价值的参考。
参考文献:
[1]徐建,杨福增,苏乐乐,等.玉米智能收获机器人的路径识别方法[J].农机化研究,2010,32(2):9-12.
[2]冯秀军,杨立东.2BDY-8型2垄密型高速气吹式精密播种机简析[J].农业机械,2007(8):85-86.
[3]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):660-663.
[4]阮鹏,俞志伟,张昊,等.基于ADAMS的仿壁虎机器人步态规划及仿真[J].机器人,2010,32(4):499-504.
[5]俞志伟,李宏凯,张晓峰,等.仿壁虎脚趾结构设计及粘附运动性能测试[J].机械工程学报,2011,47(21):7-13.
[6]王洪光,姜勇,房立金,等.双足爬壁机器人壁面凹过渡步态规划研究[J].智能系统学报,2007(4):40-45.
[7]薛胜雄,任启乐,陈正文,等.磁隙式爬壁机器人的研制[J].机械工程学报,2011,47(21):37-42.
[8]李志海,付宜利,王树国.四轮驱动滑动吸盘爬壁机器人的动力学研究[J].机器人,2010,32(5):601-607.
[9]钟灶生,薛方正,敬成林.分布式电源在仿人机器人控制系统中的应用[J].传感器与微系统,2011,30(2):139-143.
[10]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[11]王俭,赵鹤鸣,陈卫东.基于子区域的机器人全覆盖路径规划的环境建模[J].苏州科技学院学报:工程技术版,2004,17(1):72-75.
[12]冯秀军,杨立东.2BDY-8型2垄密型高速气吹式精密播种机简析[J].农业机械,2007(8):85-86.
[13]孟庆山.水源热泵机组变流量水系统节能优化探讨[J].制冷与空调,2010,10(1):84-89.
[14]谢志勇,张铁中,赵金英.基于Hough变换的成熟草莓识别技术[J].农业机械学报,2007,38(3):106-109.
[15]王东,赵宇,王秀红.一种改进的DFT迭代的MIMO-OFDM系统信道估计算法[J].应用科技,2009(3):19-22.
[16]徐文颖,张静,董建萍.导频信道估计中的插值算法[J].上海师范大学学报,2007,12(6):41-46.
[17]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):660-663.
[18]陈晖,陈晓光.基于直接判决导频跟踪的OFDM系统快时变信道估计[J].通信学报,2006,9(27):1-5.
[19]李文见,姬江涛.轮履复合式农业机器人越避障控制研究[J].河南科技大学学报:自然科学版,2007(8):57-59.
[20]王仲民,戈新良,唐智强.多传感器信息融合技术研究现状和发展趋势[J].河北工业大学学报,2003,32(2):30-35.
[21]国刚,王毅.应用BP神经网络进行手写体字母数字识别[J].人工智能及识别技术,2008,4(6):1459-1460.
[22]李二超,李战明,李炜.基于神经网络的机器人关节转矩力控制研究[J].电气自动化,2011,33(1):23-27.
[23]陈学东,孙翊,贾文川.多足步行机器人运动规划与控制[M].武汉:华中科技大学出版社,2005:74-98.
[24]王宇,范钦钰,赵亚东,等.基于仿生学的四足行走机构[J].电子设计工程,2011,19(17):27-30.
[25]许斯军,曹奇英.基于可视图的移动机器人路径规划[J].计算机应用与软件,2011(3):220-222.
[26]尹建军,武传宇,YangSimonX,等.番茄采摘机器人机械臂避障路径规划[J].农业机械学报,2012(12):171-175.
[27]姬伟,程风仪,赵德安,等.基于改进人工势场的苹果采摘机器人机械手避障方法[J].农业机械学报,2013(11):253-259.
Obstacle Avoidance Design for Picking Robot of Autonomous Navigation Based on Fuzzy Logic Control
Lu Liping1, Ge Cong2
(1.Henan College of Finance and Taxation,Zhengzhou 450002,China; 2.Wanfang College of Science & Technology, Henan Polytechnic University,Zhengzhou 451400, China)
Abstract:In order to improve the adaptive ability of the robot's autonomous navigation, a fuzzy logic control method is proposed based on the improved genetic algorithm, which can improve the ability and efficiency of robot path planning, and shorten the time of path planning. The speed ratio of the driving wheel is used as the output quantity, and the path of the robot is controlled by the speed ratio of the driving wheel. The improved genetic algorithm is introduced. Finally, the performance of the picking robot is tested. Through the test, it is found that the robot can avoid the obstacle successfully, finish the shortest path planning.And the planning response time is short, the reliability is high.
Key words:picking robot; fuzzy control; genetic algorithm; moving path; modification; fitness
中图分类号:S225;TP242
文献标识码:A
文章编号:1003-188X(2016)09-0121-05
作者简介:鲁丽萍(1963-),女,河南开封人,副教授。通讯作者:葛聪(1986-),河南焦作人,助教,(E-mail)Luliping1963@qq.com。
基金项目:河南省科技厅科学研究计划项目(142400410274)
收稿日期:2015-08-21
