低空低速植保无人直升机避障控制系统设计
2016-03-21张逊逊许宏科长安大学电子与控制工程学院西安710064
张逊逊,许宏科,朱 旭(长安大学电子与控制工程学院,西安 710064)
低空低速植保无人直升机避障控制系统设计
张逊逊,许宏科,朱旭
(长安大学电子与控制工程学院,西安 710064)
摘要:针对低空低速植保无人直升机喷洒作业过程中地表障碍物的威胁,提出了一种基于改进人工势场的避障控制方法。将地表障碍物划分为低矮型和高杆型,并制定不同的避障策略。将无人机与障碍物的相对运动速度引入到人工势场中,给出基于改进人工势场的避障控制算法。设计自适应反步飞行控制器,构建含避障控制算法和飞行控制器的完整避障控制系统。仿真结果表明,与传统人工势场相比,对于低矮型障碍物,所提出的避障控制方法避障路径缩短66.7%,避障时间减少31%;对于高杆型中的圆柱体型障碍物,避障路径和避障时间差别不大;而对于高杆型中的长方体型障碍物,避障路径缩短约42%,避障时间减少25%。该研究可为植保无人直升机规模化应用提供参考。
关键词:农业机械;设计;控制;植保无人直升机;避障;最小安全区域;人工势场
张逊逊,许宏科,朱旭. 低空低速植保无人直升机避障控制系统设计[J]. 农业工程学报,2016,32(2):43-50.
Zhang Xunxun, Xu Hongke, Zhu Xu. Design of obstacle avoidance control system for low altitude and low speed eppo unmanned helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(2): 43-50. (in Chinese with English abstract)doi:10.11975/j.issn.1002-6819.2016.02.007http://www.tcsae.org
Email:zhangxunxun0427@163.com
0 引 言
植保无人直升机作业效率高、单位面积施药量小,对推动农业规模化、信息化、精细化建设有重要作用[1-2]。然而,低空低速植保无人直升机喷洒作业时,地表障碍物严重威胁其飞行安全[3],因此增强无人机的避障能力是提高任务执行精确度和成功率的关键[4]。
针对无人机的避障问题,国内外学者进行了大量的研究,并取得了一些成果[5-8],常用的避障控制方法有人工势场法[9-11]、最优化方法[12-13]、蚁群算法[14]、博弈法[15]、流水避石法[16]等。人工势场法因其物理意义明了、算法简明、实时性好,引起了广泛关注[17-18]。但传统人工势场中存在虚拟势场作用区域固定、避障角度过大的问题[19]。针对此问题,Lee J等[20]优化了安全避障中人工势场中圆形虚拟力场作用域模型,实现了小角度避障,但仅限于平面避障。Mujumdar A等[21]考虑障碍物闯入的突然性,使用非线性预测控制与人工势场相结合的方式,启动快速规避。彭建亮等[22]通过构造不同威胁源的势函数来解决多威胁交互问题,但只是局部最优。为避免人工势场的局部极小值问题,张涛等[23]通过构建人工势场函数和变权重函数,提出了RHC-APF启发粒子群算法。
目前大多数人工势场法将障碍物视为质点或球形区域,忽略了障碍物自身形状对人工势场作用区域产生的影响[24]。然而,植保无人直升机喷洒作业过程中,地表障碍物种类繁多且形状各异,一概而论不利于高效精准地作业。同时,大多数文献未清晰阐述如何将人工势场法与无人直升机的飞行控制相结合,缺乏应用价值。针对以上问题,本文提出基于改进人工势场的植保无人直升机避障控制方法,旨在保障植保无人直升机作业安全。
1 最小安全区域
植保无人直升机在喷洒作业过程中,为规避地表障碍物,需要在障碍物周围设定最小安全区域。当无人机进入该区域时,会发生碰撞。地表障碍物种类繁多且形状各异,若最小安全区域设定为单一形状,采取相同的规避方式,可能会出现不必要的大角度避障等,降低植保无人机的作业效率。需要对障碍物分类划分并分别确定其最小安全区域。
障碍物则依据其高度分为2大类:低矮型和高杆型,记z0为障碍物的高度,m。当z0≤zL时,为低矮型;z0>zL时,为高杆型。zL为划分标准,由植保无人直升机的作业高度zd而定,一般取zL=2zd~3zd。为提高避障效率,对不同类型的障碍物,设置不同的最小安全区域,并采取不同的规避方式。对于低矮型障碍物,无人机通过爬升飞越之;而对于高杆型障碍物,无人机从侧方绕过。
1.1低矮型障碍物的最小安全区域
田间低矮型障碍物大多呈圆锥状,如土堆、坟墓等,由此确定其最小安全区域为圆锥体,在垂直面xoz内投影为三角形。图1描述了低矮型障碍物的最小安全区域,灰色三角形阴影区域为低矮型障碍物最小安全区域在xoz平面的投影,点线为无人机规避障碍物的飞行轨迹示意。

图1 低矮型障碍物的最小安全区域Fig.1 Minimum safety area of low obstacles
根据图1中的几何关系可得

无人机规避障碍物过程中,有

式中t0为无人机开始机动避障时刻,s;z0为障碍物的高度,m;zH(t0)为t0时刻无人机高度,m;α为障碍物最小安全区域斜面与水平面的夹角,(°);γl(t0)为无人机开始机动避障时最小安全区域在无人机飞行高度截面的半径,m;V(t)为无人机与障碍物相对运动速度,m/s,靠近时为正,远离为负;Vz(t)为V(t) z轴分量,m/s;t为时间,s;γl(t)为最小安全区域在无人机飞行高度截面半径,m。
由式(2)可得:无人机在爬升过程中,γl(t)是不断减小的;从顶端到目标点的过程中,γl(t)是不断增大的。
1.2高杆型障碍物的最小安全区域
高杆型障碍物又可分为2类:圆柱体型(树、电杆等)和长方体型(房子、小型建筑物等)。
1.2.1圆柱体型障碍物
树、电杆等障碍物大多呈圆柱状,由此确定其最小安全区域为圆柱体,在水平面xoy内投影为圆形,如图2。
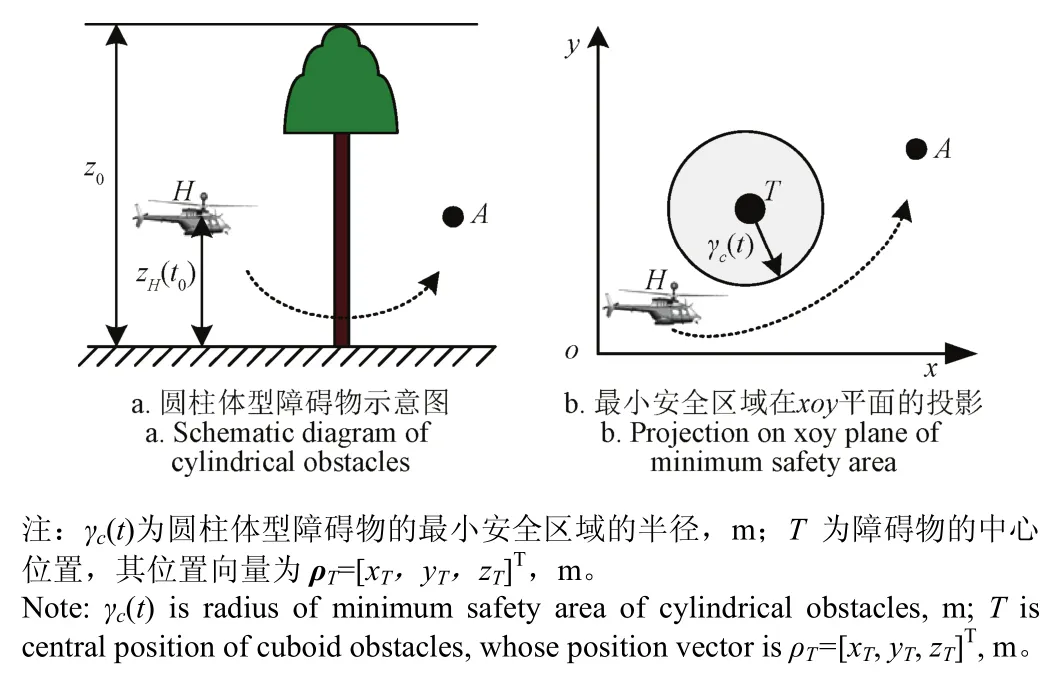
图2 圆柱体型障碍物最小安全区域Fig.2 Minimum safety area of cylindrical obstacles
无人机在规避障碍物过程中,任何时刻都满足

式中γc(t)为圆柱体型障碍物的最小安全区域的半径,m;R是常数。
1.2.2长方体型障碍物
房子、小型建筑物等障碍物大多呈长方体状,由此确定其最小安全区域为长方体,如图3所示:灰色阴影区域为长方体型障碍物的最小安全区域在xoy平面的投影。
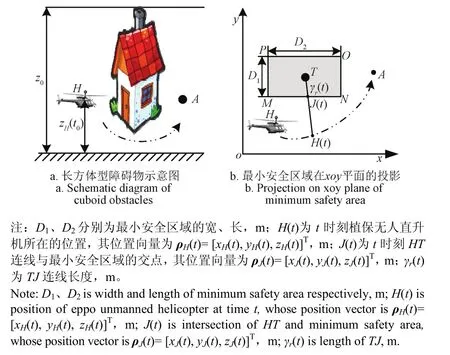
图3 长方体型障碍物最小安全区域Fig.3 Minimum safety area of cuboid obstacles
根据图中几何关系,分别得到H(t)的位置向量ρH(t)=[xH(t), yH(t), zH(t)]T和J(t)的位置向量ρJ(t)=[xJ(t),yJ(t),zJ(t)]T,其中H(t)为t时刻植保无人直升机所在的位置,J(t)为t时刻HT连线与最小安全区域的交点。
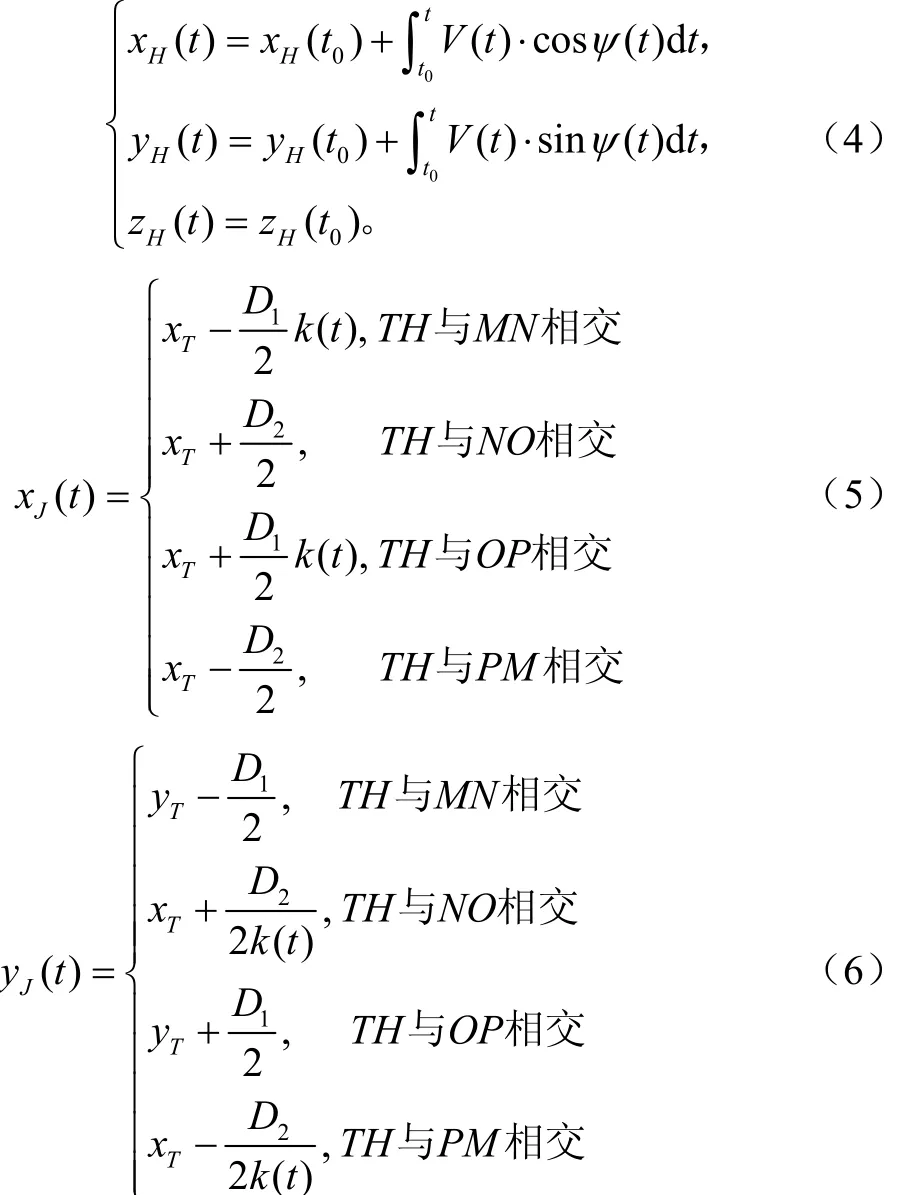

相应地

式中xH(t)、yH(t)、zH(t)分别为ρH(t)的x、y、z三轴分量,m;xJ(t)、yJ(t)、zJ(t)分别为ρJ(t)的x、y、z三轴分量,m;xH(t0)、yH(t0)、zH(t0)分别为t0时刻ρH(t0)的x、y、z三轴分量,m;xT,yT,zT为障碍物中心位置ρT的x、y、z三轴分量,m;ψ(t)为t时刻无人直升机的偏航角,(°);D1、D2分别为最小安全区域的宽、长,m;k(t)为t时刻HT连线斜率的倒数;γr(t)为TJ连线长度,m;根据图3b,当J与M、N、O、P任意一个重合时,γr(t)达最大值为sqrt+)/2;当HT⊥MN或HT⊥MP时,γr(t)达最小值min(D1,D2)/2。
2 基于改进人工势场的避障控制算法
在定义了最小安全区域后,接着通过构造改进人工势场来实现避障。针对不同的最小安全区域,给出相应的斥力场使无人机规避障碍物。
2.1改进的人工势场法
植保无人直升机在规避障碍物过程中,只能主动规避障碍物,而障碍物不能主动规避无人机。也就是说规避障碍物时,只能单方面调整无人机的姿态和轨迹。因此,只需设计斥力场,不设计引力场;并将无人机与障碍物的相对运动速度考虑到斥力场中,对传统的人工势场加以改进。构建斥力场函数为广义Morse函数

式中Jr(‖ρHT‖,V(t))为人工势场函数;f(V(t))为由相对运动速度V(t)产生的补偿系数,无量纲,当V(t)>0时,f(V(t))为递增函数,即靠近速度越快,f(V(t))值越大。又f(V(t))<1,即由相对运动速度V(t)产生的斥力场不会超过单纯‖ρHT‖产生的斥力场的影响,速度V(t)产生的斥力场起辅助作用。g和n均为常数,分别决定斥力场的幅值和变化速度,无量纲。ρHT为无人直升机H对障碍物中心T的相对位置矢量;‖ρHT‖是ρHT的向量范数,为无人机与障碍物之间的距离;‖ρHT‖∈[‖ρHT‖min(t), ‖ρHT‖max],‖ρHT‖max是规避障碍物边界,当‖ρHT‖>‖ρHT‖max时无需规避障碍物。‖ρHT‖min(t)为t时刻人工势场作用区域的最小安全距离,对于不同类型的障碍物是不同的,即

引入人工势场后,需要定义一个与之相关的虚拟力,来实现无人机的避障。综合式(9)和式(10),并令▽(ρHT)=(ρH−ρT)/‖ρHT‖,可得虚拟力函数
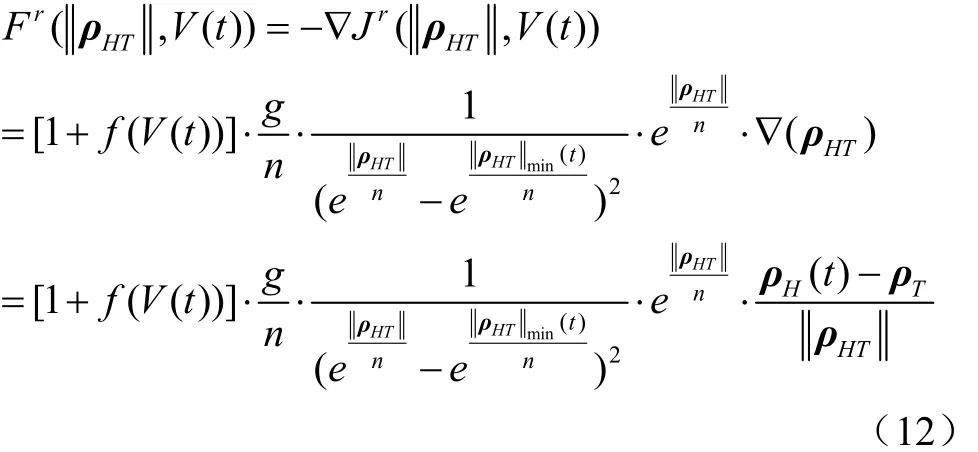
式中Fr(‖ρHT‖, V(t))为人工势场产生的虚拟力,N;▽为一算子,表示求梯度;▽Jr(‖ρHT‖,V(t))为对人工势场函数Jr(‖ρHT‖,V(t))求梯度;ρT为障碍物的位置向量,为ρT=[xT,yT,zT]T,m。虚拟力随无人机与障碍物之间距离的减小而增大,随速度的增大而增大。且当‖ρHT‖和V(t)一定时,‖ρHT‖min(t)越小,虚拟力越小。同时,增加了相对运动速度对斥力场的影响,以补偿障碍物不能主动规避无人机的缺点,用来改善避障控制的效果。
2.2避障控制指令
基于人工势场的避障是通过调整无人机的速度矢量来实现的,利用斥力场来确定规避障碍物过程中无人机速度的改变量。因此可以定义速度指令Vd(t)

将虚拟力拆分到3个通道,有
式中Vd(t)为避障速度指令,m/s;(t),(t),(t)为Vd(t)的x、y、z三轴分量,m/s;Vx(t),Vy(t),Vz(t)为V(t)的x、y、z三轴分量,m/s。

式中ψd(t)为t时刻无人直升机的偏航角指令,(°)。
3 植保无人直升机避障控制系统研究
植保无人机避障控制系统的实现既依靠避障控制算法,又需要飞行控制器对避障指令的跟踪响应。植保无人直升机避障控制系统包含避障控制算法和相应的飞行控制器。避障控制算法是外环,产生避障指令;飞行控制器是内环,调整无人机的姿态来跟踪避障指令。避障控制算法结合无人机和障碍物的信息,经过人工势场的计算,产生垂直速度指令和偏航角指令,并将这些指令发送给飞行控制器。无人机避障控制系统结构如图4。
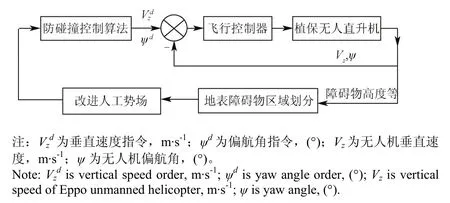
图4 避障控制系统结构Fig.4 Structure of obstacle avoidance control system
3.1植保无人直升机模型
植保无人机采用小型单旋翼无人直升机,包括其数学模型和主旋翼挥舞模型。数学模型[25-26]为
式中Π=[φ, θ, ψ, z]T为无人直升机地面坐标系下的滚转角、俯仰角、偏航角和位置的z轴分量;Γ为状态矩阵;Ω=[p, q, r, Vz]T为无人机机体坐标系下角速度分量和垂直速度;Δ为常系数矩阵;F、X均为非线性矩阵函数;U=[δlon,δlɑt]T是控制输入,δlon和δlɑt分别由纵向周期变矩操纵输入量与横向周期变矩操纵输入量,(°);Λ=[Ixx, Iyy, Izz, Ixz,m]T为自整定参数向量;m为植保无人直升机的质量,kg;植保无人机喷洒作业过程中,负载发生变化故而引起系统质量与惯性矩阵的不确定性。Ixx、Iyy、Izz分别为直升机对机体坐标x、y、z轴的转动惯量;Ixz为直升机对x轴和z轴的惯性积。小型植保无人直升机的主旋翼挥舞模型为

式中α与b分别为主旋翼纵向与横向挥舞角,(°); te为主旋翼挥舞时间常数,s;Alɑt和Alon分别是主旋翼伺服输入比例系数;Blɑt和Blon分别是副翼伺服输入比例系数;q 和p分别是绕机体坐标系y、x轴的角速度,rad/s。
3.2飞行控制器设计
飞行控制器的目标是使系统存在不确定参数的情况下,通过设计Tm、Tt、δlon、δlɑt使Π=[φ, θ, ψ, z]T能够跟踪姿态和位置指令Πd,Ω=[p, q, r, Vz]T能够跟踪速度指令Ωd;其中,Πd=[φd, θd, ψd, zd]T为地面坐标系下的滚转角、俯仰角、偏航角指令和位置的z轴分量指令;Ωd=[pd, qd, rd,Vzd]T为地面坐标系下的滚转角速度、俯仰角速度、偏航角速度指令和垂直速度指令。
反步法在设计不确定系统自适应控制器方面有巨大的优势,不仅可以灵活选取李雅普诺夫函数来提升系统的暂态响应,而且能够处理系统不确定性问题[27-28]。同时,为解决植保无人直升机模型存在不确定性参数Λ的问题,在后面的控制器设计中采用自适应法对不确定参数Λ进行在线估计。接下来,设计基于自适应反步法的飞行控制器[29]。将式(18)重写为

飞行控制器的设计过程分步进行:
1)定义Π的误差向量

式中δφ, δθ, δψ, δz分别为滚转角误差、俯仰角误差、偏航角误差和位置的z轴分量误差。对式(21)求导可得

式中K1为第1个控制参数矩阵;δ2在下一步中定义;速度指令Ωd为

式中V1为所选取的第1个李雅普诺夫函数。
对式(24)求导,并将式(22)代入得

2)定义Ω的误差向量

式中δp, δq, δr, δVz为无人直升机地面坐标系下的滚转角速度误差、俯仰角速度误差、偏航角速度误差和垂直速度误差。对式(26)两边同时乘以Δ并求导可得


式中K2为第2个控制参数矩阵;为Λ的在线估计;设计自适应更新律

式中Θ为正定对称矩阵。
将式(28)代入式(27),可得

式中V2为所选取的第2个李雅普诺夫函数。对式(31)求导可得

3)令ɑd和bd为期望的主旋翼纵向和横向挥舞角,则ɑd和bd对应的控制力矩Ud为

式中Ud为ɑd和bd对应的控制力矩,N·m;Tm为主旋翼旋转产生的升力,N;Tt为尾翼旋转产生的偏航力,N;Qm为主旋翼旋转产生的总转矩,N·m;Cmɑ和Cmb分别为主旋翼俯仰和滚转力矩强度系数;xm、ym、zm分别为主旋翼旋转轴到直升机重心的3个轴向距离,m。
令式(28)中ɑd和bd对应的控制力矩Ud作为式(33)的虚拟控制输入Ud,即可获得Tm, Tt, ɑd, bd,并代入主旋翼挥舞模型(19),最终得到δlɑt和δlon为
式(34)即为所设计的基于自适应反步法的飞行控制器,用来跟踪避障指令,与避障控制指令(17)共同构成避障控制系统。
4 仿真算例及分析
为验证基于改进人工势场的避障控制算法和所设计飞行控制器的有效性,进行了三维数字仿真,并且与基于传统人工势场的避障控制算法进行了对比。
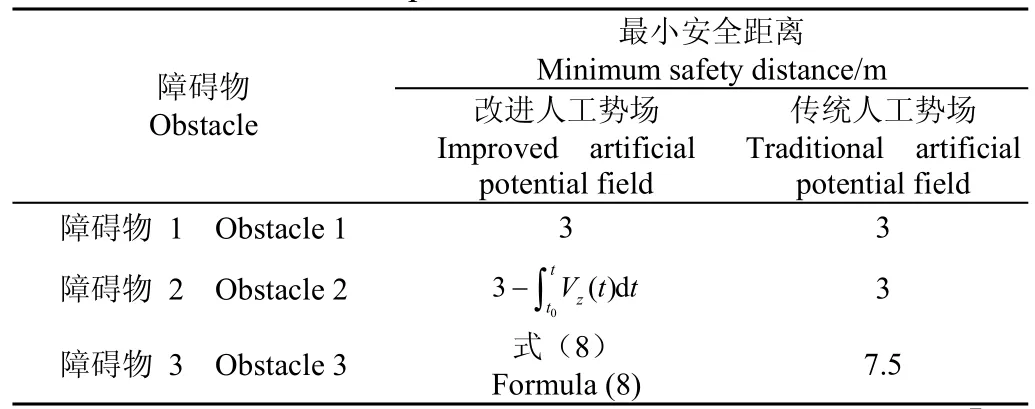
表1 2种人工势场的最小安全距离Table 1 Minimum safety distance of two kinds of artificial potential fields
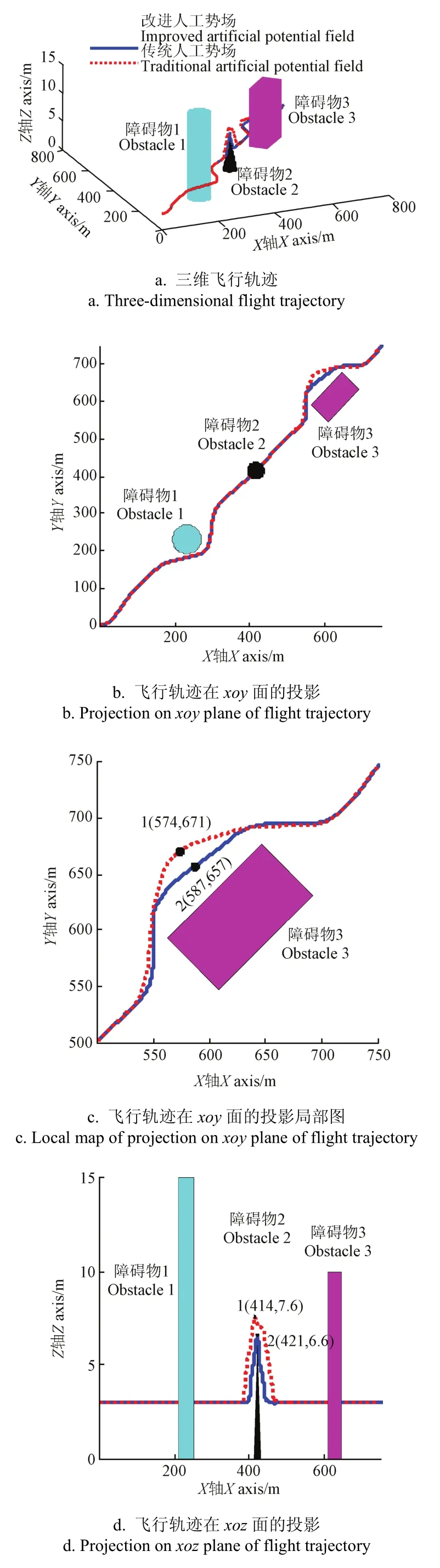
图5 有效载荷为10 kg的无人直升机避障位置响应Fig.5 Position response of unmanned helicopter with its payload weight 10 kg to avoid obstacles
仿真模型采用小型单旋翼无人直升机,农药有效载荷为10 kg,喷洒作业时速度为3 m/s,喷头流量为800 mL/min。初始位置为[0, 0, 3]Tm,目标位置为[750, 750, 3]Tm,初始垂直速度和初始偏航角均为0。在[230, 230, 0]Tm处设置障碍物1,为圆柱体障碍物,其中R=3 m,高度为15 m;在[420, 420, 0]Tm处设置障碍物2,为圆锥体型障碍物,其中α=45°,高度为6 m;在[627, 612, 0]Tm处设置障碍物3,此为长方体型障碍物,其中D1=66 m,D2=120 m,高度为10 m。改进人工势场设置不同的最小安全区域,传统人工势场的最小安全区域均采用球形区域。2种人工势场的最小安全距离如表1所示。
使用改进人工势场算法式(17)和传统人工势场算法进行对比仿真,飞行控制器均采用式(34),仿真时间为380 s,仿真结果如图5、图6所示。
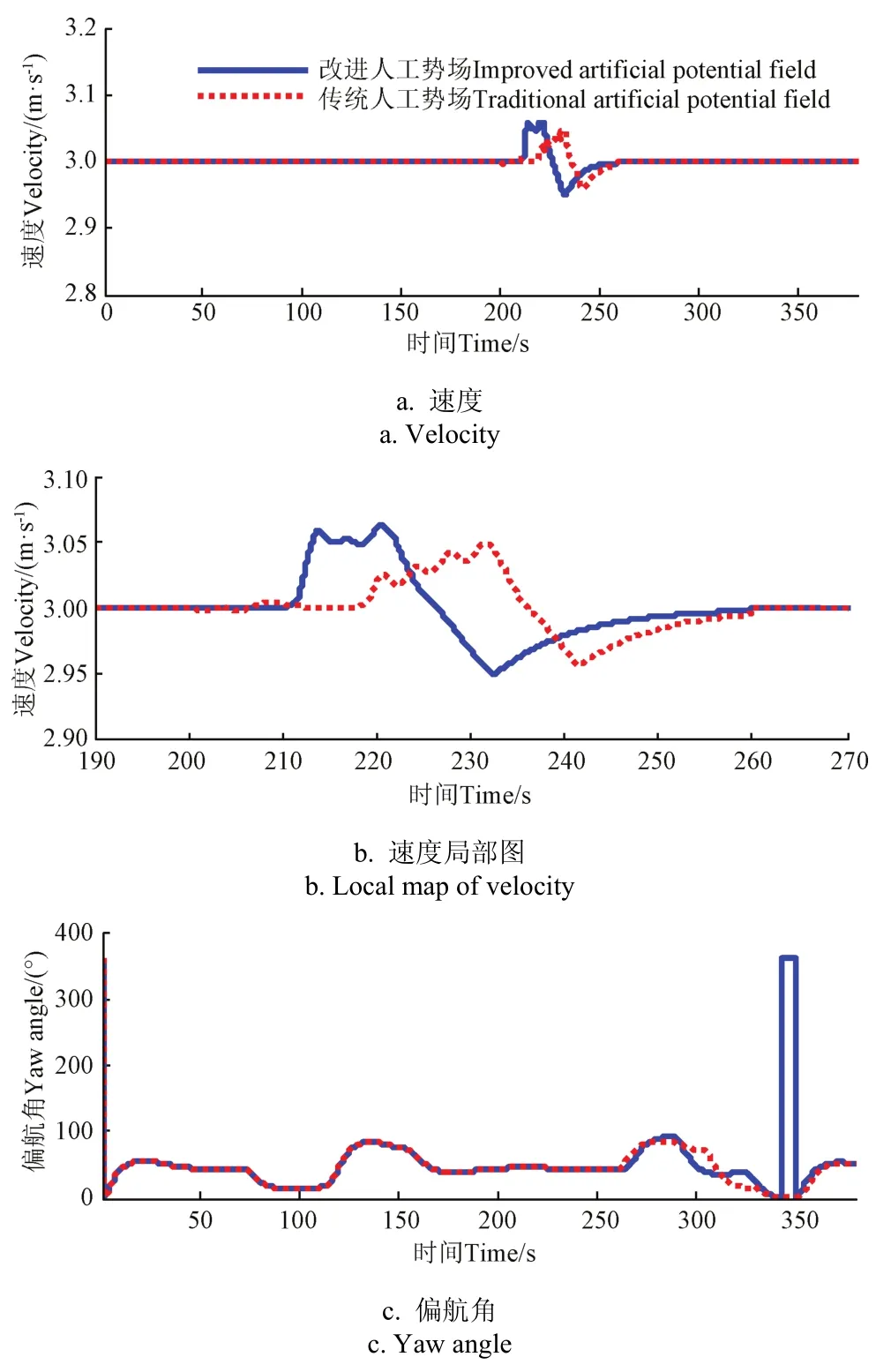
图6 有效载荷为10 kg的无人直升机避障姿态响应Fig.6 Altitude response of unmanned helicopter with its payload weight 10 kg to avoid obstacles
植保无人直升机在喷洒作业过程中,无人机系统质量以0.8 kg/min的速度减少,根据图5a,所设计的基于改进人工势场的避障控制系统能实现有效避障。且由图5可知,改进人工势场和传统人工势场均规避了障碍物。
对于高杆型障碍物1,根据图5b、5d可以看出,无人直升机侧方绕过,这时改进人工势场和传统人工势场的障碍曲线重合,即避障效果相同,这是2种人工势场法的最小安全距离相同造成的,见表1。
对于障碍物2和3,2种算法的避障效果有明显差别,主要体现在避障路径和避障时间上。对于低矮型障碍物2,根据图5d中点1、2的坐标,改进人工势场越过障碍物0.6 m,而传统人工势场越过1.6 m,可见改进人工势场避障路径更短;又根据图6a、6b,无人直升机通过调整速度爬升越过,由局部图6b可知,改进人工势场用时约40 s,而传统人工势场用时约60 s,避障时间缩短20 s,避障时间更短。对于高杆型障碍物3,无人直升机侧方绕过,根据图5c中点1、2的坐标,与传统人工势场相比,改进人工势场最远绕过最小安全区域边界缩短了19 m,即图5c中点1、2间的距离,因此,改进人工势场避障路径更短;又根据图6c,无人直升机通过调整偏航角爬升越过,而传统人工势场用时较长。
为进一步验证所设计避障控制系统的有效性,仿真模型采用有效载荷为16 kg的单旋翼植保无人直升机,喷洒作业时速度为3 m/s,喷头流量为800 mL/min。障碍物设置同表1,仿真结果如图7和图8所示。

图7 有效载荷为16 kg的无人直升机避障位置响应Fig.7 Position response of unmanned helicopter with its payload weight 16 kg to avoid obstacles

图8 有效载荷为16 kg的无人直升机避障姿态响应Fig.8 Altitude response of unmanned helicopter with its payload weight 16 kg to avoid obstacles
根据图7,在无人机系统质量以0.8 kg/min的速度减少的情况下,16 kg的无人机能有效避障。对障碍物1和3,根据图7、图8b,通过调整偏航角侧方绕过;对于障碍物2,根据图7、图8a,通过调整速度爬升越过障碍物。
总之,所设计的避障控制系统对有效载荷10或16 kg的无人机均适用,即基于自适应反步法的飞行控制器均能有效跟踪避障指令。改进人工势场算法式(17)和飞行控制器式(34)不仅能有效规避地表障碍物,而且与传统人工势场算法相比,避障路径更短,用时更少。
5 结论与讨论
针对植保无人直升机喷洒作业避障问题,设计了基于改进人工势场的植保无人直升机避障控制系统。仿真结果表明:
1)无人机有效载荷是10或16 kg,而且作业过程中,载荷是不断变化的,控制系统均能有效跟踪避障指令,所设计的自适应反步控制器稳定可靠;
2)所设计的基于改进人工势场的避障算法无论从避障路径还是避障时间均优于传统人工势场避障,以有效载荷10 kg为例,对于低矮型障碍物,避障路径缩短66.7%,避障时间减少31%;对于长方体型障碍物,避障路径缩短约42%,避障时间减少25%。
无人机实际作业时,受到各种因素作用,后续将进行无人直升机避障控制实际效果的试验,为后续实现植保无人直升机自主农药喷洒提供参考。
[参考文献]
[1] 茹煜,金兰,贾志成,等. 无人机静电喷雾系统设计及试验[J]. 农业工程学报,2015,31(8):42-47. Ru Yu, Jin Lan, Jia Zhicheng, et al. Design and experiment on electrostatic spraying system for unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015,31(8): 42-47. (in Chinese with English abstract)
[2] 周志艳,臧英,罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报,2013,29(24):1-10. Zhou Zhiyan, Zang Ying, Luo Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 1-10. (in Chinese with English abstract)
[3] 张宋超,薛新宇,秦维彩,等. N-3型农用无人直升机航空施药飘移模拟与试验[J]. 农业工程学报,2015,31(3):87-93. Zhang Songchao, Xue Xinyu, Qin Weicai, et al. Simulation and experimental verification of aerial spraying drift on N-3 unmanned spraying helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 87-93.
[4] 刘浩蓬,龙长江,万鹏,等. 植保四轴飞行器的模糊PID控制[J]. 农业工程学报,2015,31(1):71-77. Liu Haopeng, Long Changjiang, Wan Peng, et al. Fuzzy self-adjusting proportion integration differentiation for eppo quadrocopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015,31(1): 71-77. (in Chinese with English abstract)
[5] Moon J, Prasad J V R. Minimum-time approach to obstacle avoidance constrained by envelope protection for autonomous UAVs[J]. Mechatronics, 2011, 21(5): 861-875.
[6] Tanja H, Robert B, Frank O. Model-based local path planning for UAVs[J]. Journal of Intelligent and Robotic Systems: Theory and Applications, 2015, 78(1): 127-142.
[7] 孟少华,向锦武,罗漳平,等. 微小型无人直升机避障最优轨迹规划[J]. 北京航空航天大学学报,2014,40(2):246-251. Meng Shaohua, Xiang Jinwu, Luo Zhangping, et al. Optimal trajectory planning for small-scale unmanned helicopter obstacle avoidance[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(2): 246-251. (in Chinese with English abstract)
[8] Gatzke B T. Trajectory Optimization for Helicopter Unmanned Aerial Vehicles[D]. Monterey: Naval Postgraduate School, 2010.
[9] Zhou Li, Li Wei. Adaptive artificial potential field approach for obstacle avoidance path planning[C]//Zhou Li. Proceedings of 2014 7th International Symposium on Computational Intelligence and Design. Hangzhou: Institute of Electrical and Electronics Engineers Inc, 2015(2): 429-432.
[10] Liu Jianying, Guo Ziqi, Liu Shiyue. The simulation of the uav collision avoidance based on the artificial potential field method[J]. Advanced Materials Research, 2012, 591: 1400-1404
[11] Chen Yongbo, Luo Guanchen, Mei Yuesong, et al. UAV path planning using artificial potential field method updated by optimal control theory[J]. International Journal of Systems Science, 2014, 31(9): 54-65.
[12] 李霞,张继海,谢文俊,等. 无人机自主防碰撞方法研究[J].飞行力学,2011,29(6):48-51. Li Xia, Zhang Jihai, Xie Wenjun, et al. Research on autonomic collision avoidance method for UAV[J]. Flight Dynamics, 2011, 29(6): 48-51. (in Chinese with English abstract)
[13] Xu Qingyang. Collision avoidance strategy optimization based on danger immune algorithm[J]. Computers and Industrial Engineering, 2014, 76: 268-279.
[14] 刘洋,章卫国,李广文,等. 一种三维环境中的无人机多路径规划方法[J]. 西北工业大学学报,2014,32(3):412-416. Liu Yang, Zhang Weiguo, Li Guangwen, et al. A multi-path planning method for unmanned aerial vehicle (UAV) in 3D environment[J]. Journal of Northwestern Polytechnical University,2014, 32(3): 412-416. (in Chinese with English abstract)
[15] 茹常剑,魏瑞轩,郭庆,等. 面向无人机自主防碰撞的认知博弈制导控制[J]. 控制理论与应用,2014,31(11):1555-1560. Ru Changjian, Wei Ruixuan, Guo Qing, et al. Guidance control of cognitive game for unmanned aerial vehicle autonomous collision avoidance[J]. Control Theory &Applications, 2014, 31(11): 1555-1560. (in Chinese with English abstract)
[16] 梁宵,王宏伦,李大伟,等. 基于流水避石原理的无人机三维航路规划方法[J]. 航空学报,2013,34(7):1670-1681. Liang Xiao, Wang Honglun, Li Dawei, et al. Three-dimensional path planning for unmanned aerial vehicles based on principles of stream avoiding obstacles[J]. Acta Aeronautica ET Astronautica Sinica, 2013, 34(7): 1670-1681. (in Chinese with English abstract)
[17] Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[C]// Khatib O . Proceedings of 1985 IEEE International Conference on Robotics and Automation. St.Louris Missouri: Micro IEEE 1985: 500-505.
[18] Khatib O. A unified approach for motion and force of robot manipulators[J]. IEEE Journal of Robotics and Automation,1987, 3(1): 43-53.
[19] Tian Feng, Zou Jifeng, Zhang Tong. Hybrid method based on artificial potential field and differential game theory for the UAV path planing[J]. Applied Mechanics and Materials,2014, 687: 260-264.
[20] Lee J, Nam Y Y, Hong S J. Random force based algorithm for local minima secape of potential field method[C]// Lee J. International Conference on Control Automation Robotics &vision. Singapore: Nanyang Technological University, 2010: 827-832
[21] Mujumdar A, Padhi R. Reactive collision avoidance using nonlinear geometric and differential geometric guidance[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(1): 303-310.
[22] 彭建亮,孙秀霞,蔡满意,等. 基于人工势场的防空威胁建模与仿真[J]. 系统工程与电子技术,2010,32(2):338-341. Peng Jianliang, Sun Xiuxia, Cai Manyi, et al. Modeling and simulation of air defense threat based on artificial potential field[J]. Systems Engineering and Electronics, 2010, 32(2): 338-341. (in Chinese with English abstract)
[23] 张涛,于雷,周中良. 基于混合算法的空战机动决策[J]. 系统工程与电子技术,2013,35(7):1445-1450 Zhang Tao, Yu Lei, Zhou Zhongliang. Decision-making for air combat maneuvering based on hybrid algorithm[J]. Systems Engineering and Electronics, 2013, 35(7): 1445-1450.
[24] Wang Xibin, Song Chao, Zhao Guorong, et al. Obstacles avoidance for UAV SLAM based on improved artificial potential field[J]. Applied Mechanics and Materials,2013(241/242/243/244): 1118-1121.
[25] Ahmed B, Pota H R, Matt G. Flight control of a rotary wing UAV using backstepping[J]. International Journal of Robust and Nonlinear Control, 2010, 20(6): 639-658.
[26] 孙秀云,方勇纯,孙宁. 小型无人直升机的姿态与高度自适应反步控制[J]. 控制理论与应用,2012,29(3):381-388. Sun Xiuyun, Fang Yongchun, Sun Ning, et al. Backsteppingbased adaptive attitude and height control of a small-scale unmanned helicopter[J]. Control Theory & Applications,2012, 29(3): 381-388. (in Chinese with English abstract)
[27] Chen Weisheng, Zhang Zhengqiang. Globally stable adaptive backstepping fuzzy control for output-feedback systems with unknown high-frequency gain sign[J]. Fuzzy Sets and Systens, 2010, 161: 821-836.
[28] Basri M, Ariffanan M, Abdul Rashid H, et al. Intelligent adaptive backstepping control for MIMO uncertain non-linear quadrotor helicopter systems[J]. Transactions of the Institute of Measurement and Control, 2015, 37(3): 345-361.
[29] Lee C T, Tsai C C. Adaptive backstepping integral control of a small-scale helicopter for airdrop missions[J]. Asian Journal of Control, 2010, 12(4): 531-541.
Design of obstacle avoidance control system for low altitude and low speed eppo unmanned helicopter
Zhang Xunxun, Xu Hongke, Zhu Xu
(School of Electronic ɑnd Control Engineering, Chɑng’ɑn University, Xi’ɑn 710064, Chinɑ)
Abstract:Considering the threat of ground obstacles in the process of spraying for the low altitude and low speed eppo unmanned helicopter, an obstacle avoidance method based on the improved artificial potential field was proposed. The ability of the helicopter to avoid obstacle was the key issue to improve the accuracy and the efficiency, which could be realized in the following steps. Firstly, because ground obstacles were various and of different shapes, most traditional artificial potential fields regarding obstacles as a mass point or a sphere was not conducive, and they could not spray precisely if ground obstacles were treated as the same type. To solve this problem, ground obstacles were divided into 2 types i.e. low and high ones, of which high obstacles contained both cylindrical and cubic obstacles. Their minimum safety areas were defined differently: cone was for low obstacles, cylinder for cylindrical obstacles and cuboid for cubic obstacles. To prevent the wide-angle maneuvers and improve the efficiency of spraying, 2 kinds of obstacle avoidance strategies were formulated, which were climbing over them for low obstacles and bypassing them for high obstacles respectively. Secondly, in order to conquer the defect that obstacles were unable to avoid the helicopter initiatively, an obstacle avoidance algorithm based on the improved artificial potential field was given by introducing the relative speed between the helicopter and the obstacle into the repulsive potential. Meanwhile, obstacle avoidance orders were given according to the proposed algorithm, such that the helicopter adjusted its velocity and altitude in real time. Then, in view of continuously changing payload weight during the spraying process, the flight controller was designed based on the adaptive back stepping theory, which was not only to track those obstacle avoidance orders precisely, but also to suppress the parameter uncertainty caused by the change of the payload weight. Both the obstacle avoidance algorithm and the flight controller constructed a whole obstacle avoidance system, aiming at ensuring the security of the helicopter. Moreover, how to combine the obstacle avoidance algorithm with the flight controller was clearly demonstrated. Finally, simulation results showed that the proposed obstacle avoidance method could avoid ground obstacles effectively and efficiently, whose obstacle avoidance path was shorter and obstacle avoidance time was less than the traditional artificial potential fields. For the low obstacles, the obstacle avoidance path was shortened by 66.7% and the obstacle avoidance time decreased by 31%; for the high obstacles, the obstacle avoidance path and time were nearly the same as the traditional artificial potential fields when avoiding cylindrical obstacles, but when avoiding cubic obstacles, the obstacle avoidance path was shorten by 42% and obstacle avoidance time decreased by 25%. On the other hand, the adaptive back stepping controller was verified with its effectiveness and stability. The helicopter could avoid obstacles quickly and smoothly whether its payload weight was 10 or 16 kg, even though the payload weight changed continuously in the process of spraying. In a word, the proposed method has a better effect, which can provide a reference for technical applications of eppo unmanned helicopter.
Keywords:agricultural machinery; design; control; eppo unmanned helicopter; obstacle avoidance; minimum safety area; artificial potential field
作者简介:张逊逊,女(汉),河南漯河人,博士生,主要从事小型无人机应用研究。西安长安大学电子与控制工程学院,710064。
基金项目:国家自然科学基金(61473229);中央高校基本科研业务费资助项目(2014G2320006);陕西省科技攻关项目(2015GY052)
收稿日期:2015-07-13
修订日期:2015-11-05
中图分类号:V275
文献标志码:A
文章编号:1002-6819(2016)-02-0043-08
doi:10.11975/j.issn.1002-6819.2016.02.007 10.11975/j.issn.1002-6819.2016.02.007http://www.tcsae.org
