DX1B型竹根挖掘机的设计与试验
2016-03-21邓小雷夏鑫鑫许天伟邱志伟衢州学院机械工程学院衢州324000
邓小雷,李 欣,夏鑫鑫,杨 震,许天伟,邱志伟(衢州学院机械工程学院,衢州 324000)
DX1B型竹根挖掘机的设计与试验
邓小雷,李欣,夏鑫鑫,杨震,许天伟,邱志伟
(衢州学院机械工程学院,衢州 324000)
摘要:为了解决竹根挖掘过程中机械化程度低的问题,针对竹林复杂的地形条件和农艺要求,设计了一种DX1B型自动竹根挖掘机。该文阐述了该机器主要的工作原理、主要结构和关键部件的结构设计与主要参数计算,并对刀筒及其内部的压力弹簧进行有限元力学分析,对机器的强度进行验证。同时,对支架进行模态分析获得前四阶固有频率和振型,并进行机器的动态平稳性分析以便结构设计时避开共振频率激励。最后,制作小型的物理样机进行竹林间性能试验来验证竹根挖掘性能。试验结果表明:样机的刀筒外径为40~120 mm,挖掘竹径为30~70 mm的竹根,最大挖掘深度为250 mm,大多数竹根挖掘到150~200 mm左右的深度时,就可将竹底部根须扭断从而将竹根带出,且竹根形状保持良好;当样机掘根的速度为2 mm/s左右时,工作机构的平稳性和效率最优,整个掘根工作过程一般需要2~5 min,竹根挖掘效率相对于手工挖掘提高60%以上。该机器可实现自动掘进挖根和自动取根的效果,还能实现自动排土、排根的功能,整个挖掘过程无需人与竹根或者土壤接触。该研究可为丘陵山区等复杂地况的竹根清除问题提供解决方案,为竹根挖掘机实现全自动操作提供参考。
关键词:农业机械;设计;计算机仿真;竹根;自动挖掘;自动排根;竹根挖掘机;性能试验
邓小雷,李欣,夏鑫鑫,杨震,许天伟,邱志伟. DX1B型竹根挖掘机的设计与试验[J]. 农业工程学报,2016,32(2):29-35.doi:10.11975/j.issn.1002-6819.2016.02.005http://www.tcsae.org
Deng Xiaolei, Li Xin, Xia Xinxin, Yang Zhen, Xu Tianwei, Qiu Zhiwei. Design and experiment of DX1B bamboo root excavator[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(2): 29-35. (in Chinese with English abstract)doi:10.11975/j.issn.1002-6819.2016.02.005http://www.tcsae.org
0 引 言
竹子具有秆形通直、材性优良、速生丰产、再生能力强、一般三年已成材可采伐等优点,使得竹的用途非常广泛[1]。中国竹林总面积420万 hm2,年产量1.8×108t[2-3]。由于有着良好的社会经济效益和良好的生态环保意义,中国竹产业得到迅速发展和壮大,也带动了竹林资源的开发利用[4-6]。但是,竹在生产作业中存在下述问题也就显得尤为突出,即竹子砍伐后,竹根留在土壤中,一个竹根的直径约为50~120 mm,浓密的根须占去直径为0.5~0.7 m的圆形区域范围,腐烂的时间为5~10 a。如果不将竹根挖去,其所占据的土地资源就被浪费[7-8]。
竹资源主要分布在亚、非、拉的一些国家,近百年来,国外一些产竹国家引种了大量的竹种。例如,美国从中国引种的刚竹属竹种就有35种[9-12]。但是,至今欧美和澳洲等国家的市场上未见竹子采伐、栽培系列装备,更未见竹根挖掘的机器。俄罗斯虽有一种人型的挖树根机器,但没有挖竹根机械[7];日本有一种挖穴装置[13],但无法完整挖取竹根。
20世纪90年代前期,中国浙江的竹农采用一种装置将竹根钻烂再取出的方案,但取出竹根不完整,无法满足工艺品市场需要。华文礼等[14]用化学腐蚀法的方法来清理竹根,但对环境会产生一定污染。2005年有学者提出了一种有连杆往复铲式方案[15]和支架环挖式方案[9]。但是连杆往复铲式设计方案存在工作时振动很大,人的手臂难以承受机构长时间的反作用力;支架环挖式方案存在作业持续时间相对较长,生产效率相对较低。张京平[16]设计了一种筒形竹根挖掘机,但是该机通过在安装在圆筒内的竹爪将竹根取出,竹筒与竹爪之间存在相对转动导致该机稳定性较差,且无法保证竹根的完整性。
北京林业机械研究所研制了一种竹蒲头挖掘机[17],可通过机械方式将竹根粉碎,但清除后其腐烂时间仍需1~2 a,且粉碎是对竹根的完全破坏,浪费了资源。刘婧婧等[18]设计出了一种能在地形土质复杂的稠密竹林内移动作业的竹蔸清理设备,但其通过抓钩来拔取竹蔸的方式,适合小径级根系作业,且存在自动程度低,人工劳动强度很大的问题。
针对上述一系列问题,本文采用理论与仿真相分析结合的方法,研制出了一种DX1B型自动竹根挖掘机,旨在实现竹根挖掘过程的自动掘进挖根、取根、排土、排根的功能。通过对机器的挖掘性能进行试验研究,检验机器在不同进给速度、土壤属性、根径尺寸等情况下的性能,以期提高挖掘效率和挖掘质量。
1 设备研制
1.1机构组成和工作原理
DX1B型竹根挖掘机主要由支撑机构、动力系统、行走机构、操作面板以及工作机构组成,如图1所示。其中,工作机构由刀筒8,气动排土装置9,工作电机10,滑块11,气缸12构成。当该机工作时,先将支撑机构的安装支架的支腿1调节,调节到合适高度使工作机构能进行正常挖根作业。然后,打开汽油发电机4的开关,发电机开始运行工作,待电压达到220 V,打开发电机罩壳上的输出电压开关,通过电缆线输出220 V电压。接着,打开气泵3开关,气泵开始工作向外输出气体,待气压达到一定值,打开出气阀门,机架上的气缸12准备就绪;打开操纵面板2上的电源开关,电机10以额定的转速运转,待电机稳定运行后,操控控制面板上的掘进通气阀,使气缸进气,气缸推动滑块缓慢往下运动,工作机构电机10启动带动刀筒8高速旋转进行破土竹根挖掘,土壤可以沿着刀筒外壁的螺旋槽14向外排出,刀筒进行持续挖掘;当挖根动作结束时,电机10停转,操作控制面板使气缸收缩,电动机10和刀筒8快速向上运动,直至刀筒完全离开地面,刀筒内置压力弹簧17恢复原长从而推动圆形推盘18可将刀筒8内残留的土壤和竹根从中排出,实现自动排土和排根效果。

图1 DX1B型自动竹根挖掘机Fig. 1 Type of DX1B bamboo roots grab
同时,工作机构还配有自动排土装置9,当刀筒内弹簧力不足时,打开工作机构的进气阀门,气泵通过连轴中心的导气孔16,将压缩气体打到刀筒内部封闭腔中辅助自动排土和排根,使得整个工作过程达到干净、高效、不接触人的效果。
1.2工作机构设计
DX1B型竹根挖掘机工作机构安装在支架上,工作电机固定在滑块上,刀筒与工作电机通过螺旋接头连接。当控制面板打开时,气缸驱动滑块带动刀筒向下运动,即可实现自动挖掘竹根;当挖掘结束时,气缸收缩带动工作结构向上移动,将刀筒从土壤缩回,从而竹根从土中带出。支架的初始高度为1 100 mm,工作机构的最大有效行程为250 mm,可以根据挖掘深度需要调节支架支腿长度。
1.3排土(根)机构设计
在刀筒内安装有压力弹簧和与之相连的圆形滑块,如图1c所示。当刀筒从土壤中脱离时,压力弹簧回复原长,从而推动圆形推盘向外将刀筒内的竹根和土壤排出至刀筒外。此外,刀筒中设置有导气孔,通过气管连接气泵,当弹簧回弹力不足时,可以进气开关,将压缩气体打到刀筒内部封闭腔中,推动刀筒内的弹簧和圆形推盘将竹根和土壤排出,操作者无需与土壤接触。
1.4主要参数计算
1.4.1发电机的选用及功率参数
DX1B型竹根挖掘机的工作场所一般是在野外竹林,汽油发电机使用调配汽油作燃料,工作可靠,输出电源稳定,可长时间地提供电源,不受环境因素限制,适合野外作业。根据样机模型最大尺寸(≤1 200 mm),选用输出电压为220 V、最大功率3 kW的汽油发电机作为工作原动机,然后进行汽油发电机的安装布置和下一步整机的结构设计。
1.4.2气泵和气缸参数
考虑气缸动力需要和排土要求,选择额定压力为0.3 MPa、输出功率为0.55 kW的气泵作为气缸和工作机构提供输出气源。通过支架滑块与气缸相连,气缸的往复运动可实现工作机构的上下运动。由于竹根的深度为200~400 mm,限于样机尺寸,选择□ 80 mm的气缸,行程为250 mm。

式中F为气缸推力,N;P气缸为气缸工作压力,105Pa;D为气缸活塞杆直径,mm。
由式(1)可得气缸的最大推力为1 510 N,但实际掘根过程中只需500 N即可完成掘进动作。
1.4.3掘根功率和刀筒直径等参数
实际工作过程中,刀筒将竹根周围的须根切断,刀筒转速为500~1 000 r/min为佳[19-22]。

式中P电机为工作机构电机功率,kW;P发电机为外部动力发电机功率,kW;P气泵为气泵功率,kW。
根据式(3)可求出所需工作机构电机的转矩[23]。

式中T为工作机构电机的转矩,N·m;P电机为工作机构电机功率,kW;n电机为转速,r/min。
限于样机最大尺寸要求以及竹径的大小,样机模型的刀筒外径可为40~120 mm,内径为36~116 mm,长度为370 mm,气缸行程为250 mm,可以挖掘直径范围为20~116 mm、根深为100~300 mm的竹根。
1.4.4刀筒扭转强度
由于刀筒在高速旋转掘根时,刀筒会承受较大的扭矩作用而发生断裂,因此需要对刀筒强度进行校核,可以根据式(4)[24]计算扭转应力。

式中Tr为扭转应力,Pa;[Tr]为许用扭转应力,Pa;P轴为轴承受的外部电机传递功率,kW;n轴为轴转速,r/min。
1.5整机主要技术参数
DX1B型挖掘机主要应用于江浙丘陵山区,竹子密、坡度大等条件地块,其结构设计符合山区不同土壤性质、不同竹根直径、不同竹根深度等竹根挖掘的过程要求,该机采用动力源与工作机构分离结构,以适应山地林间作业,避免了挖掘过程中机器难以搬运的问题。另外,采用电气作为挖掘动力,实现竹根自动挖掘,提高了挖掘效率,降低了竹农劳动强度。该机主要技术参数如表1所示。

表1 主要性能指标参数Table 1 Main performance parameter
2 主要零部件的有限元力学仿真分析
2.1刀筒的力学分析
刀筒是DX1B型挖掘机的主要工作部件,有必要采用有限元法和专业软件对其进行仿真分析[25-27]。以外径63 mm刀筒为例,刀筒材料选择合金钢,其参数为:屈服强度E=620 MPa、密度ρ=7 700 kg/m3、泊松比μ=0.28。边界条件为约束刀筒底部沿基准轴的径向运动和刀筒沿X轴方向的运动,模拟刀筒与地面的挖掘。刀筒的载荷主要为工作电机的额定扭矩10 N·m,设置在刀筒头部的六面体表面处,并考虑刀筒自重影响。图2a为刀筒应力云图,由图2a可知最大应力在刀筒的螺旋槽上面,最大的冯米赛斯应力值约为195.6 MPa,发生在刀筒底部螺纹槽与刀齿连接处,材料的屈服强度为620 MPa,则安全系数可达3.2,刀筒的强度符合要求;图2b为刀筒位移云图,由图2b可知刀筒的最大合位移发生在刀筒与机轴连接处,最大位移约为0.05 mm。
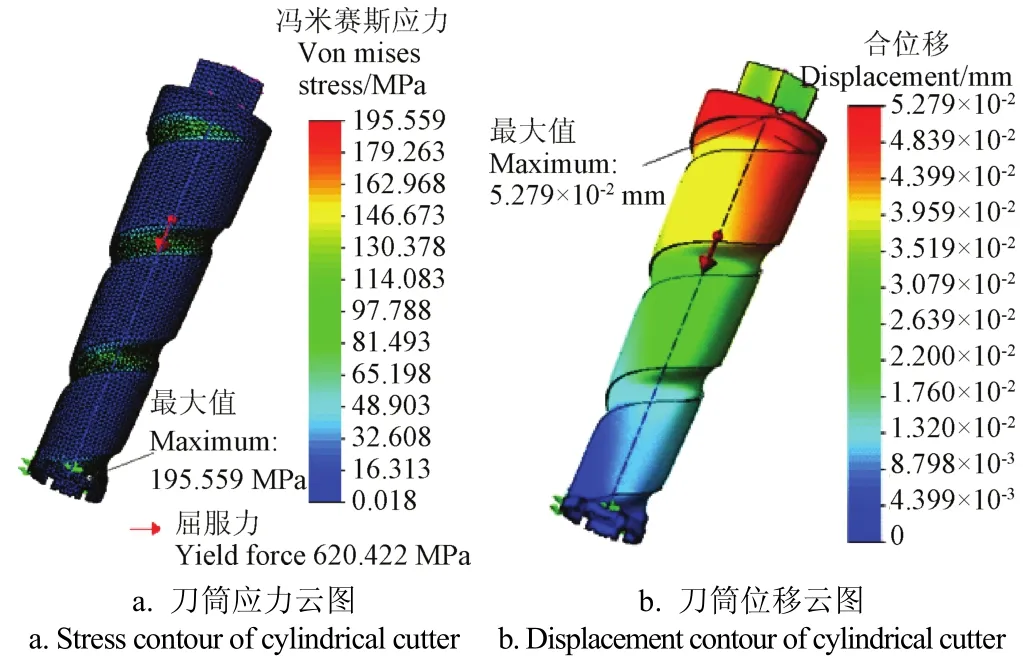
图2 刀筒有限元静力学分析结果Fig.2 Finite element static analysis results of cylinder cutter
2.2压力弹簧的应力和疲劳强度分析
对刀筒内的压力弹簧进行了静力分析和疲劳分析。材料为65号钢,其参数为:屈服强度E≥410 MPa;密度ρ=7 850 kg/m3;泊松比μ=0.3;抗剪模量τ=8×1010Pa。约束设置在弹簧两端的圆柱体上,零部件接触为全局接触,约束类型设置为下端圆形推盘固定和上端活塞圆柱面上径向位移为0,约束沿圆柱面的径向运动。弹簧的主要载荷是最大气缸推力1 510 N,并考虑自身质量影响。圆柱弹簧截面所受的主要是剪切力作用[28],如图3所示为弹簧YZ基准面Z方向的抗剪应力云图,最大应力结果约为4.6×109Pa。图4所示为压力弹簧的疲劳应力-寿命曲线,当应力幅为200 MPa时,循环次数近100万次。
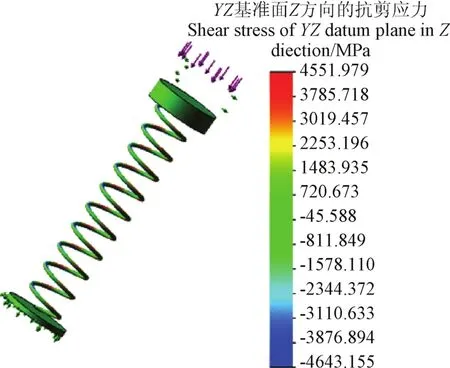
图3 弹簧抗剪应力云图Fig.3 Contour of spring shear stress
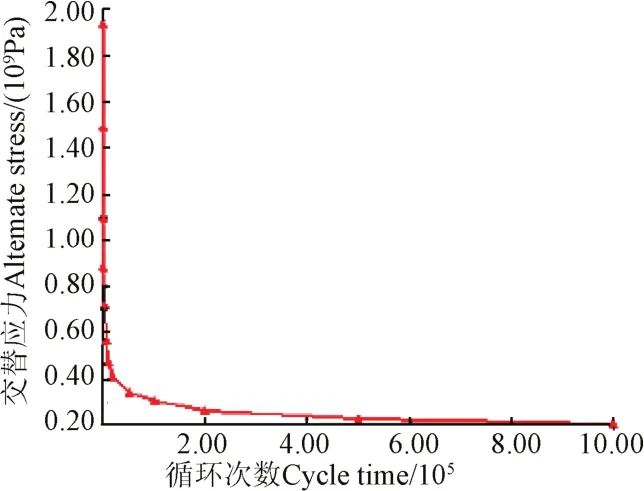
图4 疲劳应力-寿命曲线Fig.4 Fatigue stress-life curve
2.3支架的模态分析
支架是竹根挖掘机工作装置中最主要的支承部件,其的模态特性对整个工作装置的动态性能有很大影响,容易受到电机的振动频率影响发生共振,因此要对支架进行模态分析获得其固有频率和振型,在设计过程中避开共振频率激励。考虑自重影响并约束设置为支架腿底部位移约束,其前四阶的固有频率和振型如图5所示。

图5 支架前4阶模态分析结构Fig.5 Modal analysis results of holder
根据模态分析结果可知:第一阶振型的固有频率为33.23 Hz,如图5a所示,支架的振型主要是前后摆动;第二阶振型的固有频率为36.23 Hz,如图5b所示,支架的振型主要是左右摆动;第三阶振型的固有频率为91.30 Hz,如图5c所示,支架的振型主要是在竖直方向上的扭转;第四阶振型的固有频率为106.98 Hz,如图5d所示,支架的振型主要是3条支腿的内外弯曲变形。本文中的挖掘机电机的频率约为50 Hz,与支架的前四阶固有频率存在一定差距,所以该支架设计方案具有较好的动态平稳性。
3 性能试验
3.1试验设备及条件
图6为DX1B型自动竹根挖掘机的物理样机图。2015 年5月,为了验证该机的实际操作性能和工作能力,课题组在浙江衢州的山区林地对土壤中残留的竹根进行了挖掘试验[29-31],选取挖掘的竹根直径为30~70 mm。同时,考虑竹鞭和竹须对竹根挖掘过程的影响,挖掘试验中的竹根中还包括有活竹根(当场砍伐竹根)进行了挖掘试验。竹根挖掘机配套动力为重庆维斯特3.0 kW汽油发电机。

图6 DX1B型竹根挖掘机实物图Fig.6 DX1B bamboo roots grab equipment model
图7为在山地竹林中开展竹根挖掘的试验情况照片,其中图7a为试验而新砍伐后残留在土壤中的活竹根;图7b为挖掘机自动工作过程;图7c为挖掘结果;图7d为经过多次试验挖掘出来的部分竹根。试验结果如表2所示。

图7 样机竹林试验Fig.7 Pictures of experiments
3.2试验结果及分析
1)由表2可知,通过更换不同筒径的刀筒对不同根径的竹根以及不同干燥程度的土壤进行了试验,验证了该机可以很好地实现多种不同的工况下的竹根挖掘,挖掘出的竹根结果对应图7d。试验中有些竹根深度达到300~400 mm左右,而该机最大有效行程为250 mm,但是经过试验发现大多数竹根只需要到达150~200 mm左右的深度时,即可将竹底部根须扭断从而将竹根带出,节省了大量的工作时间和能源。
2)该机可自动挖掘竹根直径为30~70 mm的竹根,挖掘过程时长平均为2~5 min,相对于传统的手工挖掘一个竹根所需时间大约为5~15 min,挖掘效率提高60%以上。而且,整个过程无需与土壤接触,可以替代人工作业。此外,可折叠式伸缩支架设计不仅起到了支撑的作用更方便搬运和调整行程。
3)不同干燥程度和土壤组成对掘根的效果影响有所不同,如图7d所示。本文进行了不同类型土壤的竹根挖掘,图7d中对应的1号竹根为较为潮湿土壤的挖掘结果,此土壤中大部分为黄土,挖掘后土壤比较碎,竹根有可能需要手动从土中摘出;图7d中对应的2号竹根为中等干燥土壤的挖掘结果,此土壤中有少量砂石颗粒,竹根被挖掘后竹根被土壤包裹较为紧密,呈较为完整的圆柱形,可以顺利地从土壤中自动带出;图7d中对应的5号竹根为干硬土壤的挖掘结果,此土壤中甚至带有较大的砂石,但是该机器依然可以成功地实现竹根自动挖掘并将竹根从土中带出,而且竹根除靠近地表的部分有点碎之外其余部分形状保持良好,砂石颗粒也被完整切割。
4)工作机构的进给速度对整个挖跟机构的稳定性产生较大的影响,进给速度过大,则挖掘反作用力较大,使整个支架和工作机构被反顶,影响掘根进行;反之,进给速度太小导致掘根时间过长,严重影响掘根的效率。经过多次调速试验,最终发现掘进速度为2 mm/s左右时,工作机构的平稳性和效率最优。
4 结 论
1)研制了一种能够适应丘陵山地等复杂地况以及不同土壤性质的集自动掘进挖根、取根、排土、排根一体化的DX1B型竹根挖掘机,并进行了竹根挖掘机的仿真分析与试验。
2)通过有限元分析得出了刀筒最大的Von mises应力值为195.6 MPa,安全系数可达3.2;刀筒内压力弹簧的最大应力结果约为4.6×109Pa,而当应力幅为200 MPa时,循环次数可达近100万次;支架的前四阶固有频率不易受到外部激励影响,设计方案具有较好的动态平稳性。
3)林间性能试验结果验证了理论分析与设计的准确性与合理性。该样机最佳的掘进速度约为2 mm/s,最大有效行程为250 mm,可挖掘竹根直径为30~70 mm,挖掘过程时长平均为2~5 min,效率比人工挖掘提高60%,且竹根外形保持良好。
[参考文献]
[1] 窦营,余学军,岩松文代. 中国竹子资源的开发利用现状与发展对策[J]. 中国农业资源与区划,2011,32(5):65-70. Dou Ying, Yu Xuejun, Iwamatsu Fumiyo. The current situation and countermeasures of bamboo resource development and utilization of China[J]. Chinese Journal of Agricultural Resources and Regional Planning, 2011, 32(5): 65-70. (in Chinese with English abstract)
[2] 傅万四. 竹材定向刨花板制造技术研究[M]. 北京:中国林业出版社,2008.
[3] 李智勇,王登举,樊宝敏. 中国竹产业发展现状及其政策分析[J]. 北京林业大学学报:社会科学版,2005,4(4):50-54. Li Zhiyong, Wang Dengju, Fan Baomin. Analysis on status and policy of Chinese bamboo industry[J]. Journal of Beijing Forestry University: Social Sciences, 2005, 4(4): 50-54. (in Chinese with English abstract)
[4] 国家林业局. 2005中国森林资源报告[R]. 北京:中国林业出版社,2005.
[5] 梁辉,杨桂英. 节能环保型风景园林建设的意义、策略与方向[J]. 中国农业资源与区划,2009,30(4):78-80. Liang Hui, Yang Guiying. Significance strategy and orientation of constructing a scenery garden of energy saving and environmental protection type[J]. Chinese Journal of Agricultural Resource and Regional Planning, 2009, 30(4): 78-80. (in Chinese with English abstract)
[6] 李霞镇,任海清,徐明,等.中国竹业概况及发展建议[J].世界竹藤通讯,2008,4(6):1-4. Li Xiazhen, Ren Haiqing, Xu Ming, et al. General situation and suggestions of bamboo industry in China[J]. World Bamboo and Rattan, 2008, 4(6): 1-4. (in Chinese with English abstract)
[7] 刘汾阳. 竹根挖掘机的开发研制[D]. 杭州:浙江大学,2005. Liu Fenyang. Research and Design for Bamboo Roots Grab[D]. Hangzhou: Zhejiang University, 2005. (in Chinese with English abstract)
[8] 罗新湘,文瑞明. 竹材加工剩余物开发利用研究述评[J].湖南城市学院学报:自然科学版,2004,13(3):62-64. Luo Xinxiang, Wen Ruiming. Research and commentary of the developing and utilization of the remainders of bamboo material processed[J]. Journal of Hunan City University: Natural Science, 2004, 13(3): 62-64. (in Chinese with English abstract)
[9] 吴君琦. 基于国际贸易的中国竹产业竞争力研究[D]. 北京:中国林业科学研究院,2009. Wu Qijun. A Research on the Competitiveness of Chinese Bamboo Industry Based on the Global Trade[D]. Beijing: Chinese Academy of Forestry, 2009. (in Chinese with English abstract)
[10] 袁亚平,包立根,王利忠,等. 中国竹炭竹醋液产业发展与展望[J]. 世界竹藤通讯,2004,2(3):1-3. Yuan Yaping, Bao Ligen, Wang Lizhong, et al. Industry development and prospect of Chinese bamboo charcoal and bamboo vinegar[J]. World Bamboo and Rattan, 2004, 2(3): 1-3. (in Chinese with English abstract)
[11] 姜含春,赵红鹰,葛伟. 中国茶产业现状及发展趋势分析[J].中国农业资源与区划,2009(6):23-28. Jiang Hanchun, Zhao Hongyin, Ge Wei. Analysis of present status and development tendency of industry in China[J]. Chinese Journal of Agricultural Resources and Regional Planning, 2009(6): 23-28. (in Chinese with English abstract)
[12] 窦营,余学军. 世界竹产业的发展与比较[J]. 世界农业,2008,351(7):18-70. Dou Ying, Yu Xujun. The world's bamboo industry development and compared[J]. World Agriculture, 2008,351(7): 18-70. (in Chinese with English abstract)
[13] 盛国成,张亚军. 日本AG500型手提式挖穴机[J].现代农业装备,2004(6):69-70. Sheng Guocheng, Zhang Yajun. Japanese AG500 type portable clefts machine[J]. Modern Agricultural Equipment,2004(6): 69-70. (in Chinese with English abstract)
[14] 华文礼,吴礼栋. 毛竹竹蔸促腐技术研究初报[J]. 技术开发,2000,14(1):38-39. Hua Wenli, Wu Lidong. Research on promote corrosion technology for bamboo stump[J]. Technological Development,2000, 14(1): 38-39. (in Chinese with English abstract)
[15] 张京平,张华. 往复式竹根挖掘机[P]. 中国专利:2007100709696,2007-08-23. Zhang Jingping, Zhang Hua. Reciprocating bamboo roots grab equipment[P]. China Patent: 2007100709696, 2007-08-23.
[16] 张京平. 筒形竹根挖掘机[P]. 中国专利:2007201847167,2007-10-19. Zhang Jingping. Cylindrical bamboo roots grab equipment[P]. China Patent: 2007201847167, 2007-10-19.
[17] 传媒湖州网.竹蒲头挖掘机在湖州亮相[EB/OL]. (2009-10-26)[2014-06-22].http://www.hugd.com/xinzixun/ 2009-10/26/cms70795article.shtml.
[18] 刘婧婧,傅万四. 伐后竹蔸清理技术研究[J]. 林业机械与木工设备,2011,39(4):15-17. Liu Jingjing, Fu Wansi. The study of cleaning technology on bamboo roots[J]. Forestry Machinery & Woodworking Equipment, 2011, 39(4): 15-17. (in Chinese with English abstract)
[19] 东北工学院. 机械设计手册[M]. 北京:工业出版社,1982. [20] 陈志,杨方飞. 农业机械数字化设计技术[M]. 上海:科学出版社,2013.
[21] 中国农业机械化科学研究院. 农业机械设计手册[M]. 北京:机械工业出版社,1990.
[22] 耿端阳,张道林,王相友. 新编农业机械学[M]. 北京:国防工业出版社,2012.
[23] 李复. 力学教程[M]. 北京:清华大学出版社,2011.
[24] 张定华. 工程力学第二版[M]. 北京:高等教育出版社,2010.
[25] DS SolidWorks公司. SlidWorksr Simulation基础教程[M].北京:机械工业出版社,2014.
[26] DS SolidWorks公司. SolidWorks Simulation高级教程[M].北京:机械工业出版社,2013.
[27] Logan D L. 有限元应用与工程实践系列:有限元方法基础教程[M]. 北京:电子工业出版社,2014.
[28] 杨峰,许明恒. 基于Cosmosworks的圆柱螺旋弹簧的应力分析[J]. 计算机应用技术,2008,8:36-46. Yang Feng, Xu Mingheng. Stress analysis of a cylindrically helical spring based on Cosmosworks [J]. Computer Application Technology, 2008, 8: 36-46. (in Chinese with English abstract)
[29] 朱瑞祥,葛世强,翟长远. 大籽粒作物漏播自补种装置设计与试验[J]. 农业工程学报,2014,30(21):1-8. Zhu Ruixiang, Ge Shiqiang, Zhai Changyuan. Design and experiment of automatic reseeding device for miss-seeding of crops with large grain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2014, 30(21): 1-8. (in Chinese with English abstract)
[30] 吕金庆,田忠恩,吴金娥. 4U1Z型振动式马铃薯挖掘机的设计与试验[J]. 农业工程学报,2015,32(12):39-47. Lü Jinqing, Tian Zhongen, Wu Jin’e. Design and experiment on 4U1Z vibrating potato digger[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 32(12): 39-47. (in Chinese with English abstract)
[31] 李华,曹卫彬,李树峰,等. 辣椒穴盘苗自动取苗机构运动学分析与试验[J]. 农业工程学报,2015,31(23):20-27. Li Hua, Cao Weibin, Li Shufeng et al. Kinematic analysis and test on automatic pick-up mechanism for chili plug seedling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(23): 20-27. (in Chinese with English abstract)
Design and experiment of DX1B bamboo root excavator
Deng Xiaolei, Li Xin, Xia Xinxin, Yang Zhen, Xu Tianwei, Qiu Zhiwei
(College of Mechɑnicɑl Engineering, Quzhou Universtiy, Quzhou 324000, Chinɑ)
Abstract:There are more than 40 genera and 500 species of bamboo plants in China. Bamboo forest total area is up to 4.2 million hm2, and annual production is 18 million tons. Bamboo processing industry in China has been expanding and growing quickly because of good social and economic benefits as well as better environment protection significance, and this will drive the exploitation and use of bamboo resource. However, the bamboo roots hewn occupy a round range with a diameter of about 0.5-0.7 m and rot in several years in the land, which thus will block the growth of underground bamboo roots system if not be cleaned out in short time. Then the rapid comeback and progress of bamboo resource will be influenced, and meanwhile the land resource will also be wasted. In order to solve the low level of mechanization in the process of bamboo root grabbing, in view of the key factors affecting the bamboo root grabbing in the complex areas of bamboo forest and the different agronomy requirements, we researched and designed the automatic bamboo root excavator to solve the related problems. The main working principle of the bamboo root excavator was described. The design of the main structure and key parts was proposed. And the critical parameters were calculated. In addition, the cylindrical cutter and the pressure spring were analyzed by the finite element method. Theory analysis and simulation were presented to testify that the strength of the machine could satisfy the requirements of bamboo root grabbing. The analysis results showed that the von Mises stress of cylindrical cutter was about 195.6 MPa and its safety coefficient was 3.2. Besides, the maximum stress of pressure string was 4.6×109Pa. Meanwhile,the modal analysis was carried out on the holder of machine to obtain the first four-order natural frequencies and mode shapes; the first four-order nature frequencies were 33.227, 36.23, 91.297 and 106.98 Hz, respectively. The first order and the second order frequency were close, so they could be seen as the multiple roots of the vibration equation. The analysis of the dynamic stability was proposed in order to avoid the resonance frequency during the structural design. Finally, the experiments with small prototype were carried out in bamboo forest to verify the performance of the machine. In the experiments, the diameters of cylindrical cutters were from 40 to 120 mm, and the diameters of the corresponding grabbed bamboo roots were from 30 to 70 mm. The maximum grabbing depth was 250 mm. The experiments showed that the majority of the bamboo roots could be grabbed by digging down about 150 to 200mm rather than digging to their bottom. And the shapes of bamboo roots were kept well. When the grabbing speed was about 2 mm/s, the stability and efficiency of the prototype were optimal. The entire grabbing process needed 2-5 min. The efficiency was improved by more than 60% compared with the manual grabbing. The results show that the designed bamboo root excavator realizes the automatic feeding and picking, and has the functions of automatically discharging soil and grabbing roots. During the grabbing, the worker does not need to contact with bamboo roots and soil. The research can offer a solution for the bamboo root grabbing in the complicated hilly and mountainous area. It can provide a reference for the development of full automation of bamboo root grabbing.
Keywords:agriculture machinery; design; computer simulation; bamboo roots; automatic feed; automatic discharge grabbed roots; bamboo roots grab; performance experiment
作者简介:邓小雷,副教授,博士,主要从事机电一体化产品CAD/CAE/CAM技术及数控技术与装备自动化技术研究。衢州衢州学院机械工程学院,324000。Email:dxl@qzu.zj.cn
基金项目:国家自然科学基金青年项目(51505253);浙江省自然科学基金资助项目(LY16E050011);浙江省高等教育课堂教学改革项目(KG2015383);衢州学院中青年学术骨干培养项目(XNZQN201203)
收稿日期:2015-08-14
修订日期:2015-12-10
中图分类号:S281
文献标志码:A
文章编号:1002-6819(2016)-02-0029-07
doi:10.11975/j.issn.1002-6819.2016.02.005
