自主行驶车辆的避障控制算法研究*
2016-03-15高俊钗宁江坤
高俊钗 宁江坤
(西安工业大学电子信息工程学院 西安 710021)
自主行驶车辆的避障控制算法研究*
高俊钗宁江坤
(西安工业大学电子信息工程学院西安710021)
摘要在模拟单行道上随机出现障碍物的情况下,针对无法建立精确的智能小车的控制数学模型问题,提出基于模糊控制的智能小车避障算法。采用OV7620摄像头获取道路信息,结合图像处理算法对障碍物进行定位。通过人类驾驶车辆避障的经验对智能小车行驶路径进行局部规划,设计一个模糊控制器,实时调整智能小车的行驶姿态使其能够在不超出道路边界的情况下实现避障功能。并通过仿真实验验证该算法的有效性。仿真实验结果表明:该算法能实时、稳定地更改智能小车行驶路径,有效地躲避障碍物。
关键词OV7620摄像头; 障碍物定位; 模糊控制; 避障
Obstacle Avoidance Control Algorithm for Autonomous Vehicles
GAO JunchaiNING Jiangkun
(College of Electronic Information Engineering, Xi’an Technological University, Xi’an710021)
AbstractIn the simulation of one-way street with random obstacle, aiming at the problem of intelligent car control mathematical model cannot be established accurately, the algorithm for intelligent obstacle avoidance car based on fuzzy control is established. Using OV7620 camera to obtain road information, combining with obstacle localization image processing algorithm, uniting human driving experience for planning the sectional path of intelligent obstacle avoidance car, the fuzzy controller is designed to adjust the gesture of the car so that it can achieve obstacle avoidance within the boundaries of the road. The effectiveness of the proposed algorithm is verified by simulation experiments that show the proposed algorithm can change the driving path of the smart car in real time, and can effectively avoid the obstacles.
Key WordsOV7620 camera, obstacle positioning, fuzzy control, obstacle avoidance
Class NumberTP301.6
1引言
智能小车是移动机器人的一种,可通过ARM嵌入式编程来实现其对行驶方向、启停以及速度的控制。要想让智能小车在行驶过程中能成功地避开障碍物,必须对其进行路径规划,路径规划的任务是为智能小车规划一条从起始点到目标点的无碰路径。路径规划的方法有:可视图法、栅格法、人工势场法以及模糊控制方法等[1]。模糊技术具有人类智能的模糊性和推理能力,在路径规划中,模糊推理的应用主要体现在基于行为的导航方式上,即将智能小车的运动过程分解为避障、边界跟踪、调速等基本行为,各基本行为的激活由不同的机构分别控制,智能小车的最终操作由高层控制机构对基本行为进行平衡后作出综合反应。模糊控制的优点在于不依赖智能小车的动力学、运动学模型,系统控制融入了人类经验,计算量小,构成方法简单[2]。本文通过对智能小车的运动学模型进行分析,验证了模糊控制应用在智能小车避障的必要性。并设计模糊控制避障算法进行了仿真实验。
2采用模糊控制避障算法的必要性分析

图1 智能小车运动学模型
本文中的智能小车是后轮驱动、前轮转向的车体,对智能小车所在的环境做了一下假设,智能小车所在平面为光滑平面;速度较低,没有剧烈的航向变化;以及轮胎侧滑等因素时,采用图1所示的运动学模型来分析其平面运动情况[3]。其运动学模型可描述为
(1)
其中,φ为转向轮的转向角;θ为车身与X轴的夹角;l为小车前轮与后轮的轴间距;r为参考点Or到车身后轴中心O的距离;vf为前轴中心点的速度。从式(1)可以看出,智能小车的运动学模型具有非线性、强耦合性的特点,要实现智能小车的有效控制必须充分考虑这些因素。由于模糊控制避障算法不依赖受控对象的精确的运动学模型,因此采用模糊控制避障算法控制智能小车进行避障操作。
3模糊控制系统输入信息的获取
该系统采用OV7620数字摄像头采集道路环境信息,将其安装在与地面高度为h处,且与地面成α角俯视道路,其在智能小车上的安装位置如图2所示。为了采用几何的方法对障碍物进行测距定位,就需要求得摄像头的水平视角与垂直视角。

图2 摄像头在车体上的安装示意图
4避障控制系统的设计
智能小车采用摄像头获取道路前方的环境信息,在运动过程中,摄像头实时采集道路前方的信息,经过图像处理获取车体与障碍物和道路边界的相对位置信息。经过模糊规划器处理后输出智能车避障所需要的导航角和速度[4]。其控制系统如图3所示。

图3 控制器系统结构
4.1输入与输出的模糊化处理
由于智能小车要在不超出道路边界的情况下避开障碍物,且模拟道路的宽度为50cm,车体宽度为11cm。因此对于车体在横向运动的控制精度要高于在纵向运动上的控制精度[5~7]。在纵向距离上摄像头所能看到的最远距离为1m,因此其物理论域为[0,1m],将纵向距离的输入变量MF(即:YP)的模糊集划分为{Near,Middle,Far}。在横向距离上,由于车宽为11cm,在不超出道路边界的情况变量X的物理论域为[-39cm,39cm],车体右侧距离(即Rdis)的模糊输入变量MR的模糊集划分为{NB,NM,NS,ZO,PS,PM,PB}={“左远”,“左中”,“左近”,“零”,“右近”,“右中”,“右远”}。车体左侧距离(即Xdis)的模糊输入变量ML=MR。车体舵机的最大输出角度分别为左30°和右30°,在这里定义左为负,右为正,因此舵机的论域为[-30°,30°],舵机U的模糊集合为{TLB,TLM,TLS,TZ,TRS,TRM,TRB}={“左大”,“左中”,“左小”,“零”,“右小”,“右中”,“右大”}。智能小车的速度论域为[0,2m/s],小车输出速度V的模糊集合为{NS,ZO,PS}={“快”,“中”,“慢”}。
4.2模糊控制规则库设计
根据人类驾驶车辆的经验,当车辆能顺利地通过障碍物时,车辆按原来的方向和速度行驶,当车辆不能顺利地通过障碍物时,首先判断障碍物的方位,车辆准备实施避障操作,假设障碍物在道路的左边,应控制小车的前轮向右转向同时控制驱动后轮减速,绕开障碍物。当车体通过障碍物且靠近右边界时,控制前轮向左转向,使其重新返回到的道路中心线行驶。当障碍物出现在道路右边时,实施与上述避障过程相反的操作。根据此原理设计如表1所示的模糊控制规则[8~11]。
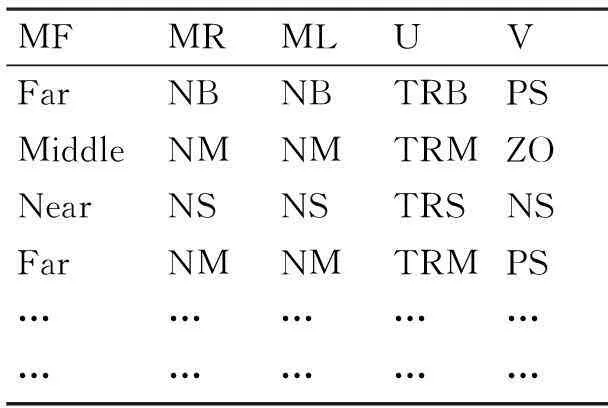
表1 模糊控制规则表
4.3控制器输出参数的反模糊化
模糊推理采用Mamdani的max-min合成法,首先根据输入的模糊化值激活模糊规则库中所有输入变量隶属函数大于0的规则。接着根据每条被激活规则的前件确定输入量、各自的隶属度并将它们进行取小运算,用得到的结果切割规则后件,这样就得到每个激活模糊规则的推荐模糊结果,再将所有激活规则的推荐结果进行并操作,得到的结果就是模糊推理输出的结果,这就是一个模糊量。将模糊推理得到的结果反模糊化后才可以应用到控制中。由于智能小车在避障的过程中对系统的实时性要求较高,因此采用重心法对得到的模糊量进行反模糊化处理[12]。
5实验与仿真
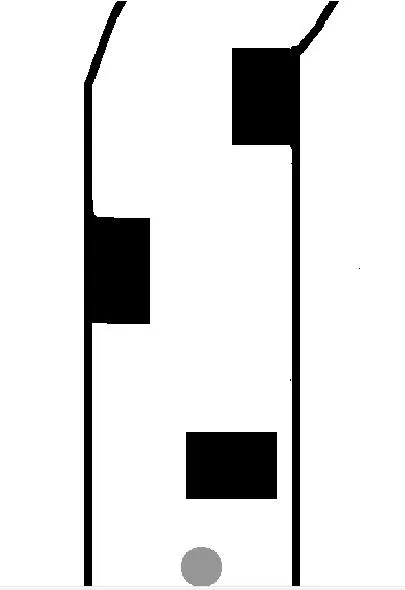
图4 仿真环境
为了对模糊避障控制算法的有效性进行验证,在VS2010平台上采用C++语言设计仿真环境进行了避障仿真实验。搭建的仿真环境如图4所示。其中黑线表示道路的边界线,黑色方框表示虚拟道路中随机出现的障碍物,灰色圆形表示小车。
在该虚拟仿真环境中,为了得到小车在实施避障情况下的最大速度(步长)。在设定实施避障的危险距离为80的时候,且小车的步长为45个像素点,对小车通过第一个障碍物的情况进行了测试,第一个障碍物左下角的坐标为(235,550),在这里分别选取1.7、1.5、1.3、1倍步长进行了测试,测试结果如图5所示。从图10中可以看出只有当步长为58.5个像素点时,小车能够顺利的实施避障。
为了对该算法在复杂情况下的避障能力进行验证,在这里设定小车的初始步长为15,并设计了形状不同的障碍物进行避障实验,仿真实验过程如图6所示。图中黑色几何图形和不规则图形代表障碍物。实验结果表明,在道路边界内随机出现的各种形状的障碍物,小车均能够在不超出道路边界的情况下实施避障。

图5 最大车速仿真测试图

图6 复杂情况下的避障实验
6结语
本文研究了在模拟道路边界以内随机出现中等偏小障碍物的情况下,采用模糊控制算法,控制智能小车实现障碍功能。文中分析了智能小车的运动学原理,推导了智能小车运动方程,将模糊控制应用于避障过程中,建立了模糊控制规则表,并在VS2010平台上对设计的模糊避障控制算法进行了仿真实验,使小车具备了避开道路边界内随机出现中等偏小障碍物的能力,且能够快速准确地避开障碍物。
参 考 文 献
[1] 孙涵,任明武,唐振民,等.基于机器视觉的智能车辆导航综述[J].公路交通科技,2005,5(25):132-135.
SUN Han, REN Mingwu, YANG Jingzi, et al. Intelligent vehicle navigation based on machine vision overview[J]. Highway Transportation Science and Technology,2005,5(25):132-135.
[2] 李士勇.模糊控制、神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1998.
LI Shiyong. Fuzzy control、neural control and intelligent controltheory[M]. Haerbin: Haerbin Institute of Thchnology Press,1998.
[3] 陈瑾.智能小车运动控制系统的研究与实现[D].南京:东南大学,2005.
CHEN Jin. Research and implementation of intelligent vehicle motion control system[D]. Nanjing: Southeast University,2005.
[4] 蔡自兴,贺汉根,陈虹.位置环境中移动机器人导航控制研究的若干问题[J].机器人,2000,13(3):32-35.
CAI Zixing, HE Hangen, CHEN Hong. Several problems of research on mobile robot navigation control in position environment[J]. Journal of Robot,2000,13(3):32-35.
[5] Maaref H, Barret C. Sensor-based fuzzy navigation of an auto nomous mobiles robot in an indoor environment[J]. Engineering Practice,2000,8(7):757-768.
[6] Reinnier P. Fuzzy technique for mobile robot obstacle avoidance[J]. Robotics and Autonomous System,1994(12):143-153.
[7] 谢守勇,鲍安红,管在林,等.温室移动机器人导航和避障模糊控制[J].农业机械学报,2002,33(2):74-76.
XIE Shouyong, BAO Anhong, GUAN Zailin, et al. Fuzzy control of navigation and obstacle avoidance for mobile robot in Greenhouse[J]. Journal of Agricultural Machinery,2002,33(2):74-76.
[8] 从爽.神经网络、模糊控制及其在运动控制中的应用[M].合肥:中国科学技术大学出版社,2001.
CONG Shuang. Neural network、Fuzzy control and its application in motion control[M]. Hefei: University of Science & Technology China Press,2001.
[9] Zhang Jianguo, Ni Yude, Sharma A B. Data buses take flight[J]. Circuits and Devices Magazine, IEEE,2002:18-31.
[10] Hall I K, Stigall P D. Distributed flight control system using fiber distributed data interface[J]. Aerospace and Electronic Systems Magazine, IEEE,1992:21-33.
[11] Mehdi Abbasi, Mohammad Danesh, Mostafa Ghayour. A path fuzzy planner for autonomous underwater vehicles to avoid moving unknown obstacles[J]. Proceeding of the 2010 IEEE International Conference on Mechatronics and automation,2010:1264-1269.
中图分类号TP301.6
DOI:10.3969/j.issn.1672-9722.2016.02.004
作者简介:高俊钗,女,副教授,研究方向:计算机视觉、自主导航与控制。宁江坤,男,硕士研究生,研究方向:智能控制。
基金项目:西安工业大学校长基金(编号:XAGDXJJ1212)资助。
*收稿日期:2015年8月11日,修回日期:2015年9月25日
