远程操控水面漂浮物清洁船的设计与应用
2016-02-23廖志青范汝健庄宇业莫泽生杨国强徐俊成
廖志青,范汝健,庄宇业,莫泽生,杨国强,徐俊成
(华南理工大学广州学院,广东广州510800)
远程操控水面漂浮物清洁船的设计与应用
廖志青,范汝健,庄宇业,莫泽生,杨国强,徐俊成
(华南理工大学广州学院,广东广州510800)
主要针对水葫芦和水面漂浮的垃圾的清理,设计了远程操控水面漂浮物清洁船。设计了其动力系统、传动系统、执行系统、调节系统、收集系统,通过结构实体检测研究,有效解决了结构干涉和运输效率问题,达到清洁水面漂浮物的目的。控制部分包括直流电机驱动模块、无线遥控模块,通过实际调试,实现智能化与远距离操控。与普通清洁船操作相比,该船将打捞、聚拢、收割、输送、收集、卸载于一体,全程自动化,无需人工,节能环保,更加简便。
水面漂浮物;清洁船;远程操控
据监测了解,一株水浮莲正在以每8个月繁殖6万新株的速度泛滥成灾。相关部门就此号召清剿水浮莲,但是手段比较落后,主要是人工打捞、碾碎或晒干埋掉,清除速度远远滞后于水浮莲狂长速度[1]。为此,自主设计了一艘远程遥控清洁船,根据软件设计购买材料,加工,组装实现各个模块的功能,最后实现迅捷、大规模清理水浮莲的目的[2]。
1设计原理
如图1所示,清洁船有5个机械系统构成,包括动力系统、传动系统、执行系统、调节系统、收集系统[3]。传送带能准确地将水面漂浮物运输,配合传送工作,同时有齿皮带则更好地承载负荷以及进行动力传输。螺旋桨中的叶片可以更好地与水接触发力,使船能迅速的向前推进。当需要急转弯收集时,可令柔性舵通过转向完成任务需要,使船更加灵活工作。船头设置收集调节臂,在水面漂浮物分布零散的区域作业时,可以提升工作效率。收集箱位于船尾,底部装有滚轮,在靠近岸时,可轻松实现搬运作业。
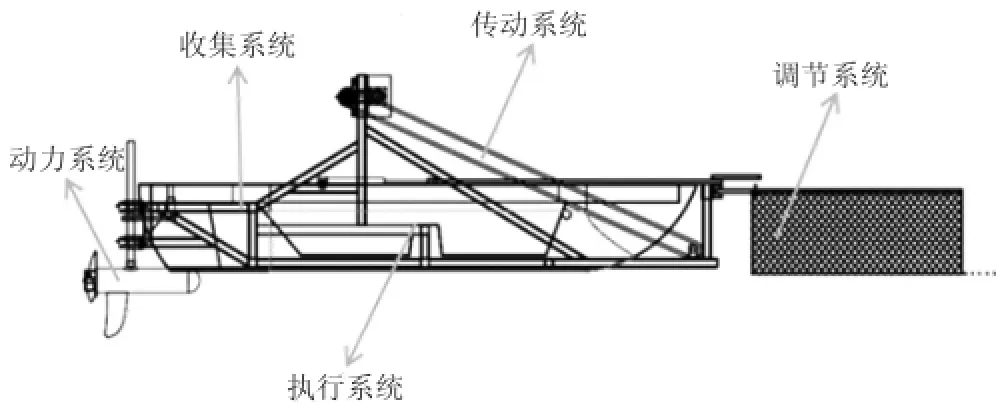
图1 设计图
(1)动力系统:如图2所示,由蓄电池提供总动力,为每个电机供能。以电动机为船动力,电源位于传送带下面,同时装上变频器控制动力输送。

图2 动力系统
(2)传动系统:清洁滚轮上的高强度橡胶可在与传送带接触时改变形状,接着配合传送工作后,再恢复原来状态,能将水葫芦完成承接工作并把它收集,有齿皮带则更好地承载负荷以及进行动力传输。
(3)执行系统:位于传送带下面的推杆在无线电接收模块接收到信号时,开始伸缩运动,带动船头的机械摆动收集臂,紧密配合。
(4)调节系统:主要包括机械摆动收集臂、输送带等,前舱两侧安装2个机械收集臂,能使垃圾收集宽度增加,并且自由开合。在水葫芦分布零散的区域作业时,可以提升工作效率,减少时间的浪费。
(5)收集系统:位于船尾,当靠近岸时,可轻松实现搬运移送水葫芦的物流作业。
2控制系统设计
控制系统主要由stc89c52单片机、无线电接收模块、无驱动摄像头、串口通信模块、降压模块、发射器构成,如图3所示[4]。由单片机STM32F103控制无线数字传输芯片nRF2401,通过无线方式进行数据双向远程传输,两端采用半双工方式通信,该系统具有成本低,功耗低,软件设计简单以及通信可靠等优点,依靠无线数字传输芯片可实现远程通信和控制。
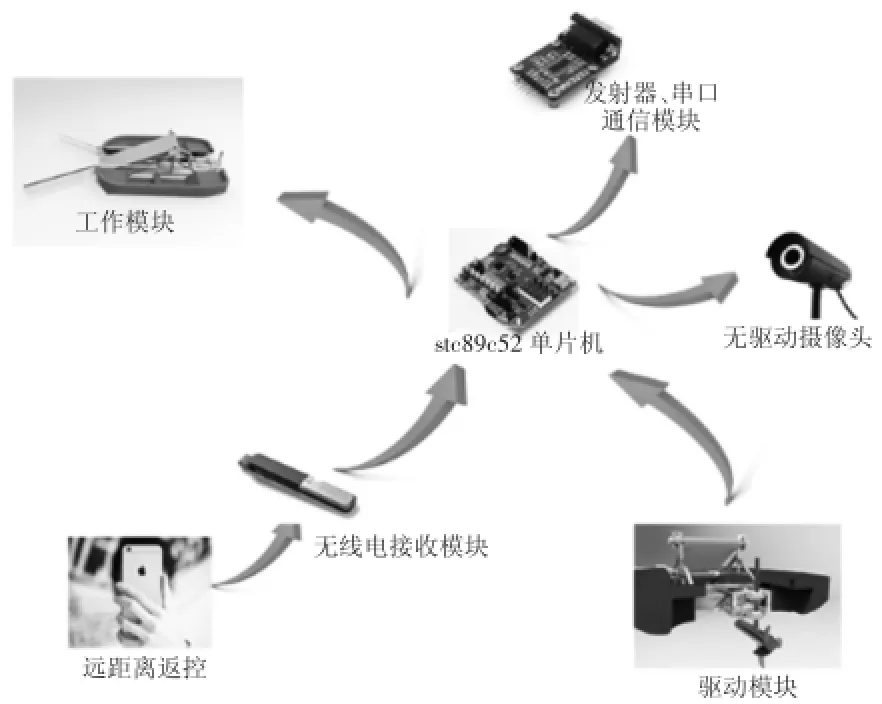
图3 工作原理图
通过发射器发出船运动的信号,无线电接收模块接受信号,通过控制系统把信号转为电信号传送给电机,电机带动螺旋桨使船体前进。当把左转的信号通过发射器发射,无线电接收模块接受信号,系统转化为电信号传输给减速电机,减速电机转动,通过传送带,使螺旋桨的角度发生变化,从而得到船体转向。当电信号传输给推杆时,推杆接收信号实现伸缩的功能,带动船头的伸缩臂。
船体控制部分用型号stc89c52单片机控制,其具有成本低,控制稳定的特点,而且其功能完全可以满足本作品的控制。
本设计采用的是外接驱动,即L298N大电流驱动,L298N是专用驱动集成电路,属于H桥集成电路,有起输出电流增大,功率增强等优点。其输出电流为2 A,最高电流4 A,最高工作电压50 V,可以驱动感性负载,如大功率直流电机、步进电机、电磁阀等等,其输入端可以与单片机直接相连,从而很方便地受单片机控制。当驱动直流电机时,可以直接控制步进电机,并可以实现电机的正转和反转(图4为电机控制模块)。为了避免电机对单片机的干扰,本模块加入光耦,进行光电隔离,从而使系统能够稳定可靠的工作。具体见图5(总电路图)。
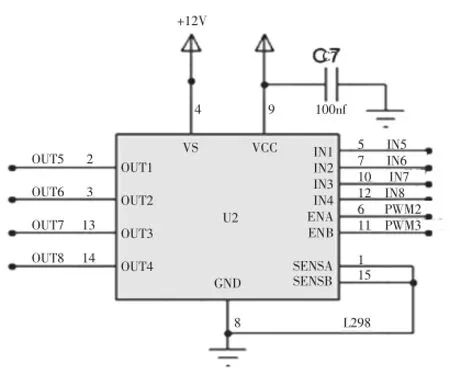
图4 电机控制模块

图5 总电路图
3结束语
设计的水面漂浮物清洁船具有体积小,操作方便,工作非常灵活,清洁效率高的特点,一旦形成产业化生产,可有效地根除因漂浮物过多而破坏生态平衡,环境恶化的后患,其产生的经济效益和社会效益将会有着相当大的意义。
[1]曹志强.一种新型水上清洁机器人的设计与实现[J].青岛大学学报,2007,20(2):80-82
[2]任芸丹,王翔.多智能体遥控绿色性评价方法的应用研究[J].机械设计与制造,2011(7):263-265.
[3]邓启文.空间机器人遥操作双边控制技术研究[D].长沙:国防科技大学,2006.
[4]Fred Halsall.多媒体通信[M].北京:人民邮电出版社,2004.
The Design and App lication of FloatClearance Vesselby Remote Control
LIAO Zhi-qing,FAN Ru-jian,ZHUANG Yu-ye,MO Ze-sheng,YANG Guo-qiang,XU Jun-cheng
(Guangzhou College of South China University of Technology,Guangzhou Guangdong 510800,China)
This articlemainly aims at the cleaning of the water bottle gourd and the floating garbage.The design of the power system,transmission system,execution system,control system,collection system,through the detection of structural entities,effectively solve the interference structure and transport efficiency,to achieve clean floating objects.The control part includes DC motor drive module,wireless remote control module,through the actual debugging,to achieve intelligent and remote control.Compared with the ordinary cleaning ship operation,the ship will gather,fishing,harvesting,transporting and collecting and unloading in one,full automation,without manual,energy saving and environmental protection,more convenient.
inclinable power press;safety;design
U674.2
B
1672-545X(2016)12-0142-02
2016-09-26
廖志青(1983-),男,广东人,本科,助理工程师,高级技师,主要研究方向为机械工程及自动化技术。
