RTG集装箱堆场智能化远程控制技术综述及探讨
2016-02-23乔俊杰
乔俊杰
(南京港龙潭集装箱码头有限公司,江苏南京210000)
RTG集装箱堆场智能化远程控制技术综述及探讨
乔俊杰
(南京港龙潭集装箱码头有限公司,江苏南京210000)
我国自动化集装箱码头发展尚处于起步阶段,对现有设备操控网络进行自动化改造是顺应这一趋势的重要途径。国内堆场远程调度主要集中在轨道式龙门起重机上,而对RTG的智能化远程控制研究较少,对RTG的纠偏系统研究更是少有涉足。针对现有集装箱堆场控制模式存在的问题,以堆场作业系统为控制对象,并研究了一系列的定位、纠偏、防撞、光纤通讯、智能调度、智能控制、远程控制等先进技术及子系统,提出一种新的“智能化+远程控制”的港口堆场系统作业新模式,为我国港口集装箱堆场的远程控制和智能化提供了理论研究基础及技术支持。
RTG;集装箱堆场;智能化;远程控制
世界经济与国际贸易增速加快将推动全球集装箱运输需求增幅扩大。IMF去年10月发布的《世界经济展望》预测,2016年全球经济将增长3.6%,同比高出0.5个百分点。著名航运咨询机构克拉克森预测,今年全球集装箱运输需求增长4.2%,增速加快1.7个百分点。德鲁里预测,今年全球集装箱运输需求增长3.3%,增速加快1.6个百分点。从国内市场来看,上海航运交易所预计,综合模型预测认为,今年中国港口集装箱吞吐量将达到2.17亿TEU左右,同比增长3.5%~4.5%.现代港口正成为经贸发展的催化剂,它对周围地区和腹地产生巨大的商业辐射功能,推动区域经济和贸易发展[1]。
世界港口都在大力推进第四代高效智慧港口建设[2]。纵观世界主要港口的发展趋势,第二、三代港口仍是当今港口发展的主流,随着经济全球化、市场国际化和信息网络化,一些大型港口已经开始向第四代港口转型,正向国际化、规模化、系统化发展,形成高度整合的“大物流”港,在国外,如新奥尔良港、鹿特丹港、汉堡港和新加坡港等国际港口在现代信息技术方面的应用早为人熟知且享誉国际。因此,进一步拓展港口智能化功能的“增值物流”、打造技术密集型的“智能港”是当前和今后港口发展的潮流。我国港口只有跟上这一发展潮流,才能真正实现强港梦。如今,我国港口加快推进信息化建设,构建现代化、信息化的港口管理与运作体系,努力打造智能港口,迈出了其向国际枢纽港口看齐的关键一步。借助信息的全面感知和智能互联能力,港口的集疏运、生产作业、海关监管、仓储物流、港口服务等多种港口需求做出智能化响应,让港口形成具备可持续内生动力,加速推动港口的业务升级,从而帮助它们实现向国际枢纽级港口的快速演变。在港口转型升级的大潮中,智能化已然成为港口未来的发展方向。
目前,我国港口生产调度、装卸过程还是以人工操作模式为主,不仅效率低,成本高,同时安全性也得不到保障。港口装卸设备系统总体上具有间隙性生产的特点,设备利用率低,平均水平约30%左右,这是由运输装卸系统的特点所决定的,而生产作业时,装卸强度很大,由设备的任何故障引起的停机都将给正常生产带来严重影响,直至使整个装卸系统瘫痪[3]。传统集装箱码头生产作业受自然环境、技术发展等因素影响较大,在新形势下,集装箱码头在生产作业和操作管理模式方面的精细化、系统化、智能化化要求更高。国外自动化码头已经实现了集装箱堆场的全自动作业,我国自动化集装箱码头发展尚处于起步阶段,对现有设备操控网络进行自动化改造是顺应这一趋势的重要途径。
集装箱堆场是船舶装卸作业与内陆提交箱作业间的一个缓冲区,起到临时储存集装箱的作用。随着码头集装箱吞吐量不断增加,堆场系统对整个集装箱码头作业能力和效率瓶颈的作用越来越明显,优化堆场系统作业已成为重要的研究课题。现有半自动化集装箱堆场虽然在一定程度上实现了堆场智能化管理和远程控制,但是其堆场管理系统普遍采用外购,而自身独立开发的系统则存在功能单一、算法冗杂的缺陷,而且构建整个集装箱自动化堆场投资较大,同时全方位监控方面存在视频数据延迟,安全性能差。同时由于采用全称无人操作,在一些关键节点使用机器直接判断,容易出错也导致效率偏低。所以研制针对目前港口中制约生产效率、安全、成本等因素,提出一种新的“智能化+远程控制”的港口堆场系统作业新模式,该模式综合考虑技术创新、劳动强度、安全保护、建设投入及可靠性,从理论和技术上对半自动化远程控制和智能化展开深入研究,以期满足现代港口发展的需要。
1 RTG智能控制技术概述
1.1 RTG作业状态智能感知与自主控制
场桥远控系统(iCRCS)通过从TOS系统中获取堆场空间信息、集装箱信息以及RTG信息后,对每一个集装箱的空间位置、搬运设备(RTG)以及RTG的最优路径进行了确定。此时场桥远控系统对RTG发出指令,通过系统的智能感知及RTG的自主控制功能,完成集装箱的进场或出场。集智能作业与远程控制为一体的新型堆场作业模式中,集装箱的进出场主要搬运设备为RTG,因此智能化远程操作用,所涉及到的智能感知和自主控制主要包括RTG大车运行感知与控制,集装箱信息智能感知、RTG小车作业感知与控制3部分。
(1)RTG大车运行智能感知和自主控制
智能作业与远程控制中,RTG在完成一次作业后,其位置信息和作业状态信息会自动反馈给TOS系统,TOS系统将该信息传输给场桥远控系统并给其发送作业指令。所涉及的智能感知和自主控制技术如表1所示。
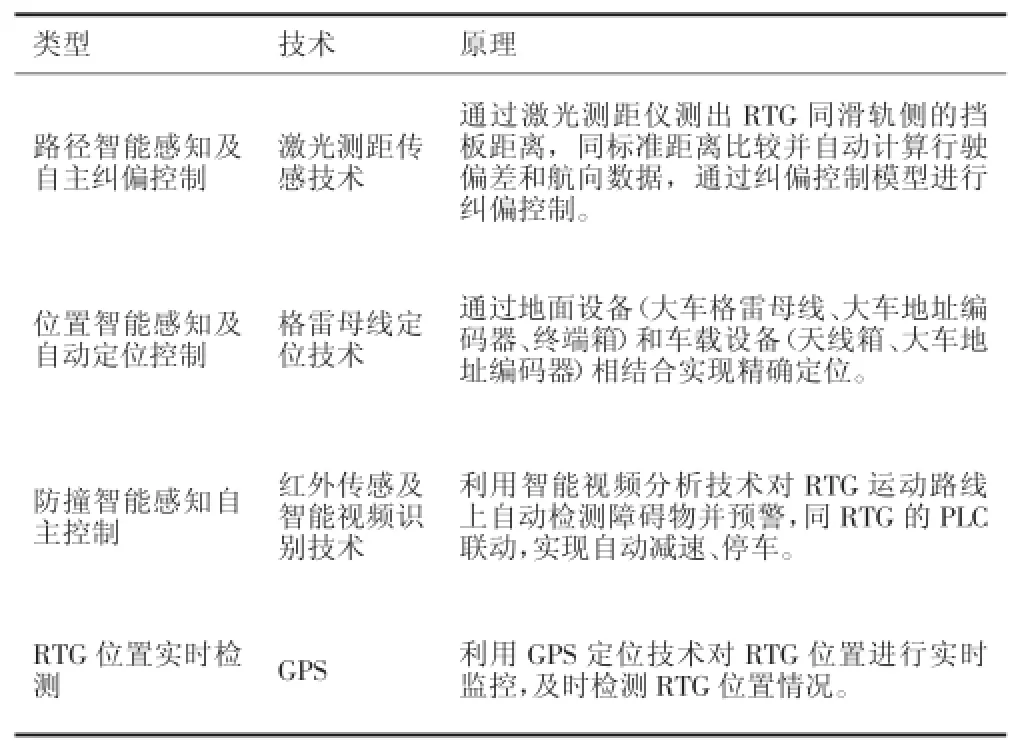
表1 RTG大车运行中智能感知技术
(2)集装箱车辆位置信息智能识别
在集装箱堆场中,每个集装箱的位置信息由场桥远控系统(iCRCS)从TOS系统中获取,并实时反馈给TOS系统予以更新,而堆场内的集装箱车辆信息则是通过GPS技术实现实时定位。在集装箱车辆上安装DGPS设备,与PLC或者远程操作主控工作站连接,进行授时与定位功能,实现车辆位置的实时定位输出,精度在2 cm以内;实现输出GPS的授时同步信号,精度为20 ns;相关数据输出频率为10~20 Hz;输出经纬度坐标信息,可以转换到场地平面坐标信息,以及转换为场、贝排的箱位信息;提供串口以及网口接口连接,可与工作站电脑连接通讯,也可以直接连接PLC实时通讯;可提供场地GIS相关信息,自动计算与目标场地的距离。
(3)RTG小车作业智能感知与控制
在场桥远控系统(iCRCS)自主控制下,RTG大车运行至制定位置后,由RTG小车完成集装箱的卸箱或起吊作业。所涉及的智能感知和自主控制技术如表2所示。
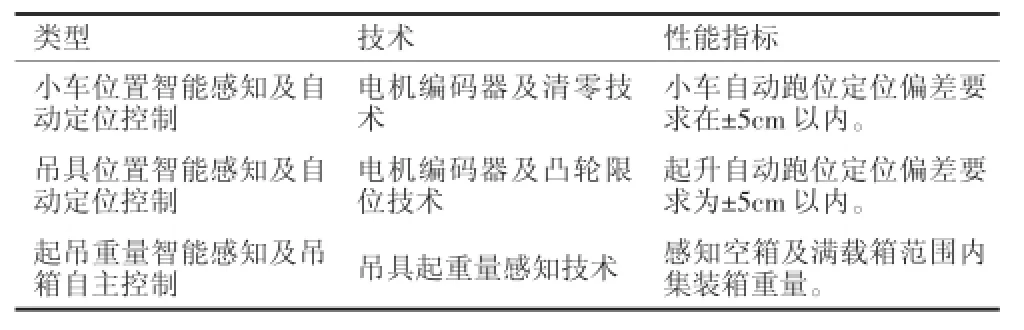
表2 RTG小车作业中智能感知技术
1.2 RTG安全检测与保护技术
安全保护装置是保护RTG安全运行的装置。在RTG操作运行中出现异常、发生一系列故障甚至危险情况下,可及时发出警报和指示信号,使其得到迅速处理或自动停机,以防止发生事故,损坏设备,影响生产和危及职工生命安全。主要安全检测及保护技术如下。
(1)大车自动纠偏
利用安装在RTG两侧的激光测距仪和安装在滑轨侧的挡板测量出两者之间的距离,当测出的距离与预先设定的标准距离有误差时,自动纠偏软件计算出高精度准确的行驶偏差和航向数据,通过专用接口与PLC进行数据交换,实时掌握轮胎吊的工作状态,根据纠偏控制模型控制轮胎吊前后大车的驱动电机,纠正轮胎吊的行驶方向和速度,实现自动纠偏功能。
(2)大车防撞安全保护
大车防撞系统采用上海安维尔公司的RTG障碍预警系统。操作人员在中控室内,通过视频及其它传感器,对在集装箱堆场的RTG远程操控。利用智能视频分析技术在RTG运动路线上障碍物的自动检测预警。在RTG的4条支撑腿上安装摄像机,对运动前方可能出现的人、车等较大障碍物进行报警,同时和RTG的PLC联动,实现自动减速、停车。
(3)视频监控保护
视频监控系统通过安装在RTG的摄像头,获取现场作业画面,在中控室的显示终端上显示车道集卡、吊具的作业情况及设备周围环境,帮助远程控制人员及时了解现场情况。
(4)堆场防护
为了防止集卡拖车任意闯入远程操作的RTG工作区域,而导致RTG与拖车发生碰撞,需要将该处堆场防护起来,采用立柱加围栏的物理隔离方式进行防护。
1)采用高1 600 mm防护桩拉钢丝隔离。
2)防护桩采用直径50 mm镀锌钢管(查询设计规范)。
3)每个防护桩间隔6 000 mm.
4)钢丝绳分为四层防护,每层间隔400 mm.
5)钢丝绳头尾有张紧装置。
6)钢丝绳上挂有警示标志:“封闭场地禁止进入”。
7)不能影响拖车进出。
需要防护的堆场平面区域大小180 m×50 m,围着这个区域,每隔6 m要埋一根立柱,地面下首先挖开联锁块,打孔超过800 mm,形成一个倒锥形的孔,埋下钢管,并浇灌一定深度的混凝土,再填实并拼好联锁块。
立柱采用直径50 mm的镀锌钢管,钢管上涂有黄黑色警示期,钢管顶端封闭,防止雨水进入。钢管上均匀分为4层,每层两段焊接圆环,用于挂拉钢丝绳,钢丝绳在两端安装有张紧装置。中间两层钢丝绳上挂有警示牌,注明“封闭场地禁止进入”。以拖车进出通道的边缘树立的立柱为堆场防护隔离设施的边缘,拖车进出通道上不拉钢丝绳,确保拖车的正常运行。
2集装箱堆场远程控制技术
RTG远程控制系统实现采集与处理、控制、监督及管理等功能,其作业过程为:直接从堆场管理系统(CTOS)中得到优化后的指令,并解析待作业集装箱堆场位置坐标,通过判断决策,选择最优适合作业的RTG上,并将指令发送到RTG的PLC上,驱动RTG自动运行起升、小车运行、大车运行等机构,使其准确停止在目标位置操作范围内,到达信息反馈后,处于安全考虑,通过CTOS系统将设备控制权交给位于远端的中控室内的操作司机,由司机通过现场的实时视频,操作控制RTG实现吊具下落、上锁、起升等动作,之后,将由CTOS完成目标箱为后续工作。RTG远程控制系统物理模型及架构层次构成如图1所示。
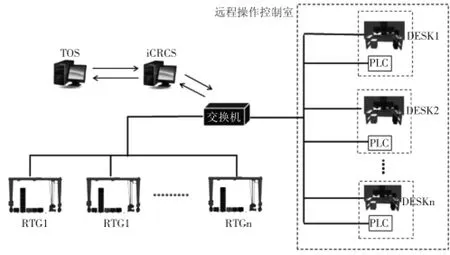
图1 RTG远程控制系统架构图
(1)自动控制子系统
自控控制子系统需要专用的任务服务器,将CTOS吊柜任务进行优化排序,形成于设备可以理解的位置坐标和动作指令,并指定到相应的RTG执行该指令,需要RTG准备自动动作到目标位,做好动作前的各项工作,准确实现这一功能的前提是远程控制中定位子系统,只有准确将RTG小车运行机构、小车起升机构以及大车运行机构等三大运行机构自动控制到位,才可以确保设备自动运行时准确的到达目标位置,保证了三大机构自动运行的精度和稳定性。
(2)中控子系统
中控子系统为整个系统控制中心,实现港口箱位管理系统CTOS与中控子系统的融合,中控子系统能实时读取CTOS系统指令,并进行优化处理,实现中控PLC与港口设备的稳定通讯。其主要由远程操作台及中控PLC控制系统组成。
(3)视频子系统
视频子系统是机械视觉系统在码头堆场的具体重要应用,机械视觉是通过摄像机的视频画面,传输并保存在视频服务器上,实现计算机分析,得出画面中的信息,并作数字化处理,从而完成类似各种传感器的工作。视频切换后,其信号和远控台操作手柄进行绑定,所见即所操作。可TOS系统中记录的箱区堆箱状态进行比较,实现箱区堆放纠错功能,也可以实现RTG设备吊箱运行的轨迹优化,减少能源损耗。其主要由四部分组成:前端设备、信号传输设备、中心视频切换控制、中心视频信号的显示与记录。视频系统主要由:远控操作台、显示器和服务器以及视频软件系统等组成。视频信号需要高清画面,像素值需达到百万以上,对于视频信号的要求清晰、画面感无延时。
(4)通讯子系统
实现RTG与远程中控室的通讯,要保证通讯信号传输的带宽、稳定、实时性,其中远程通讯PLC是必不可少的。远程通讯PLC主要与中控室进行通讯,将中控室过来的控制指令传递给RTG上的原控制PLC,并将远程设备上的信息传递给中控室。远程通讯PLC需要有较强的通讯功能,并且性价比高,RTG作为移动设备与中控室的通讯方式现阶段有如下四种方式:通过带光纤的电缆卷筒、专用光纤卷筒、漏波电缆、无线AP通讯。为保证信号传输的带宽、稳定、实时性,采用光纤电缆通讯技术或漏波电缆无线通讯方式(RTG)。无线AP通讯因为难以满足多路视频带宽传输的要求,所以本远程控制系统不考虑采用无线AP通讯方式。远程操作需求,图像质量最好达到720 P要求,每路视频信号占用网络带宽2.5 M左右。可通过视频切换显示减少占用带宽。控制系统设计时充分考虑安全性,当出现网络故障或延迟超过时限要求时,按照“无信号,不动作”原则,保证及时停机与安全,通讯子系统示意图如图2所示。
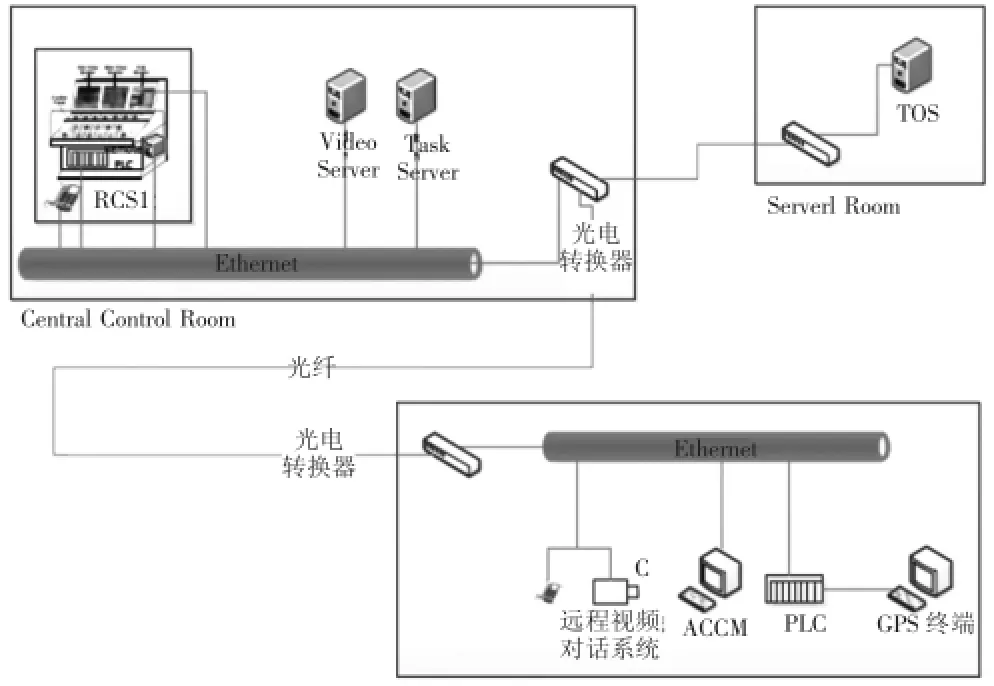
图2 通讯子系统示意图
(5)安全防护子系统
大车自动纠偏、防撞功能,机械视觉作为防撞保护装置使用,使用双目接卸视觉系统,可以得到立体的图像,可以分析立体图像的信息得到视频中物体的大小、距离等信息,可以换算成位置信息,从而实现防撞保护。
RTG远程控制系统是借助于先进的网络、视频、传感器和控制技术,是随着计算机技术、通信技术、新型传感器技术和自动控制技术的飞速发展和日益成熟而发展,其综合计算、网络和物理世界等复杂系统,通过计算技术、通信技术和控制技术的有机融合与深度协作,实现信息世界和物理世界的紧密融合,是一种深度嵌入式实时系统,同时也是通过网络将信息系统与物理系统连接在一起而构成的一种大型、异构、分布式的实时系统。在RTG远程控制系统中所有计算模块、通信模块、网络节点、RTG、中控台等物理组件,是一个感知并控制并实现远程控制和通信的过程,实现了对堆场RTG安全、可靠、高效、实时、准确的感知和控制。
3结束语
针对现有集装箱堆场控制模式存在的问题,以堆场作业系统为控制对象,对RTG自主控制、RTG作业状态智能感知等关键技术进行研究,提出了一种“智能+远程控制”的新的堆场系统控制模式,并研究了一系列的定位、纠偏、防撞、光纤通讯、智能调度、智能控制、远程控制等先进技术及子系统,提出一种新的“智能化+远程控制”的港口堆场系统作业新模式,为我国港口集装箱堆场的远程控制和智能化提供了理论研究基础及技术支持。
[1]梁日杰.2016世界经济展望与挑战[J].科技展望,2016(18):237.
[2]孙光圻.第四代港口对中国港口建设的启示[J].中国港湾建设,2010(05):71-73.
[3]蔡欣.港口生产调度组织过程优化探析[J].中国水运(下半月),2015(12):69-70.
Summary and Discussion of IntelligentRemote Control Technology for RTG Container Yard
QIAO Jun-jie
(Nanjing Longtan Port Container Terminal Co.,Ltd.,Nanjing Jiangsu 210000)
The developmentofautomatic container yard in China isstill in the initialstage,and it isan importantway to adapt to the trend of the automation of the existing equipment control network.Domestic yard remote scheduling is mainly concentrated in the track type longmen crane,and the RTG intelligent remote control research is less,the RTG of the system is less involved in the correction system.Aiming at the existing problem of container yard by yard operation control system as the control object,advanced technology and research orientation,a series of correction,anti-collision,optical fiber communication,intelligent scheduling,intelligent control,remote control and operation subsystem,new port system and put forward a new kind of"intelligent+remote control",the study offers theoretical foundation and technical support for remote controland intelligent storage container ports in china.
RTG;container yard;intelligent;remote control
U693.5
A
1672-545X(2016)12-0123-04
2016-09-20
乔俊杰(1985-),男,山西朔州怀仁人,助理工程师,学士学位,研究方向:机械设计制造及其自动化,港口机械。
