激光负向牵引技术及其在空间领域中的应用
2016-02-20孙琼阁刘正君张兵刘军虎北京电子工程总体研究所哈尔滨工业大学自动化测试与控制系
孙琼阁 刘正君 张兵 刘军虎( 北京电子工程总体研究所 哈尔滨工业大学自动化测试与控制系)
激光负向牵引技术及其在空间领域中的应用
Negative Tractor Laser and its Application in Space
孙琼阁1刘正君2张兵1刘军虎1(1 北京电子工程总体研究所 2 哈尔滨工业大学自动化测试与控制系)

近年来,采用光力迫使物体运动的技术逐渐在航天领域中得到应用,例如:太阳帆技术,然而这种物体的运动是背向光源的。通过光来实现对物体的吸引一直是人类的梦想,随着光力的证实和激光矢量调制技术的发展,这种梦想逐渐成为可能。作为功率密度最高的光源,用激光牵引物体向着光源运动,通过对激光光场的设计实现光力对微粒的逆光吸引,是目前最前沿的科学研究之一。而这类实验的成功,使得科学家们对这种研究的兴趣达到了高峰,并被美国航空航天局(NASA)认为是最有可能实现非接触式吸引物体的超前技术。
1 光力概述
光对被照射物体施加光力的概念,最早由德国数学家和天文学家开普勒在1619年观测彗星时提出。1871年,麦克斯韦在理论上证实了光力现象。对于一个以光速运动着的光子,它具有传统意义上的动量,称其为线性动量,其值为普朗克常数除以波长。光照射在物体上,因线性动量的交换而施加力的作用,最初称之为辐射压力。辐射压力很小,仅有10-6N/m2,所以人们很难察觉。
作为光功率密度最高的光源,激光的发明使得光力得到了实际的应用,最典型的例子就是光镊,是激光与物质间进行动量传递时形成的三维光学势阱。1970年,贝尔实验室的Arthur Ashkin等人第一次观测到仅依靠激光产生的辐射压力,使微米量级的粒子被稳定地俘获在光势阱中。微粒在光梯度力作用下朝向焦点运动,同时微粒还受到了激光产生的辐射压力,推动其远离光源。当梯度力和散射力达到平衡时,微粒就会被俘获在焦点附近。光镊适用于操控介观物质,已经成为光操控领域中一种发展很成熟的工具,但只能实现对微小微粒的短距离移动。

光束聚焦在微粒中心正上方时受力原理图
除了线性动量之外,光子也具有自旋角动量。1909年,英国物理学家坡印亭就提出圆偏振光具有角动量(实际上是自旋角动量),并且认为当光经过某个光学器件(比如波片)改变偏振态时,会伴随着角动量在光和器件之间转移。1936年,Beth将一个半波片水平悬挂在石英玻璃纤维上制成扭秤,当右旋圆偏振光通过该波片转换为左旋圆偏振光时,激光自旋角动量的改变引起了波片转动。该实验的测量结果验证了坡印亭的猜想。现在我们知道,左(右)旋圆偏振的光子具有自旋角动量为正(负)的普朗克常数除以2倍的圆周率。一个线偏振光可以分解为幅度相等的2个旋转方向相反的圆偏振光的线性叠加,因此它的自旋角动量为零。
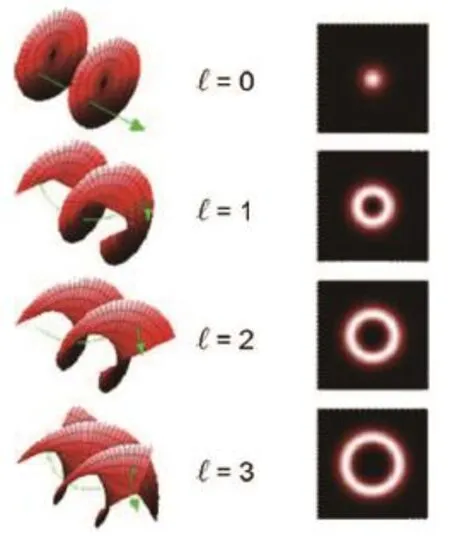
拉盖尔-高斯模式激光(涡旋光)的轨道角动量图(l为阶数)
直到1992年,科学家们才意识到光也可以具有轨道角动量。众所周知,我们熟悉的高斯激光是旁轴波动方程本征解的最低阶模。其实,旁轴波动方程还有另外一组完备的正交本征解。这种拉盖尔-高斯激光具有的螺旋波前与流体力学中的涡旋具有相似之处,因此将其命名为光涡旋,具有光涡旋特性的光便称之为涡旋光。荷兰莱顿大学的Allen等人认为光涡旋携带有另外一种动量:轨道角动量。对于拉盖尔-高斯模式激光(LGpl)来说,其中每个光子具有的轨道角动量为L乘以普朗克常数除以2倍的圆周率。
随着光子线性动量、自旋角动量、轨道角动量的发现,人们逐渐意识到可以通过对轨道角动量(光涡旋)的调制,实现对光场中的物体进行各种力学操控,特别是向着光源的负向操控及传送。光负向力使得物体向光源方向的运动成为可能。
2 激光负向牵引技术
2003年,Grier拉开了激光除了做光镊之外,还能推动物体运动的序幕。2011年,Chen等提出了光牵引的概念,他们在理论上证实了光负向力的存在,微粒在具有轨道角动量的激光光束中可以实现逆光传输。通常,人们将光场中牵引物体朝向光源运动的力称为光负向力,产生光负向力的光源称为牵引激光。微粒在牵引激光中逆光传输的原理可以用帆船逆风航行来解释:光场调制参数就相当于帆船的帆,光力的作用在这里就相当于帆船受到的横向限制力(垂直于船体),通过光场调制,从而分解出一个牵引物体逆光运动的力。
随后,更多的科学家们开始投入到这一研究中来。其中,国立澳大利亚大学的John Sinko和Clifford Schlecht,计划将其应用于100km距离上的空间物体的传送,例如:大气气溶胶采样、空间碎片的清除、太空漂流物的取回等。
在《Nature》杂志的一篇针对光负向力的总结性文章中,Aristide Dogariu指出光的负向力广泛存在,而能否产生光负向力物体运动,在于对光场、物体以及物体所处环境的设计。对于传统的望远镜系统,虽然整体光力沿着光传播的方向,但是分析次镜,它受到的合力是逆着光源的反向牵引力;普通透镜往往用来加强前向光散射和光动量,但这也意味着透镜受到的合力是反向牵引力。因此,利用对光场、物体以及物体所处环境的设计,就可以制作光的反向牵引系统。
2015年,南开大学也在正向光力方面取得了巨大进展,实现了光场对特殊材质90mg物体的正向宏观移动。理论上,如果采用基于这种材料制备的驱动帆板负载500kg的载荷,将获得0.09m/s2的加速度。这些研究成果表明,科学家们关于光驱动物体运动的设想正在成为现实。
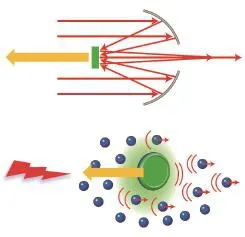
望远镜系统受力图

普通透镜系统受力图
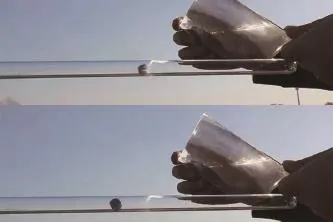
南开大学所做的太阳光驱动特殊物体运动实验
3 激光负向牵引技术的空间应用
2011年11月开始,NASA和美国戈达德航天飞行中心(GSFC)开始不断对光驱动物体运动技术进行研究,试图探寻该技术的发展空间,找到该技术与航天之间的切入点,并计划将其应用于行星地质样品、地球大气粒子样品、空间碎片等远距离小体积样品的搜集和传送中。
NASA在2011年11月开展了激光牵引技术的先进性创新(NIAC)研究:
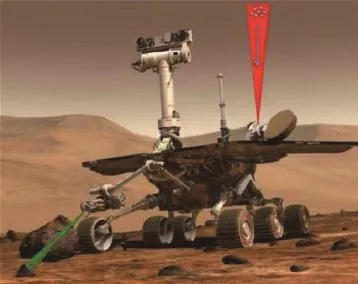
NASA的行星样品采样示意图
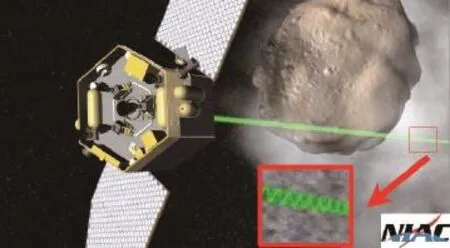
NASA的空间微粒搜集示意图
NASA设想的空间采样实验示意图
2012年1月,完成了牵引激光的调研工作。
2012年4月,完成了牵引激光可传送物体尺度的实验研究。
2012年7月,完成了牵引激光可传送物体特性的实验研究。
2012年10月,构建了一套可获取气溶胶微粒的遥感系统,并组建了团队。
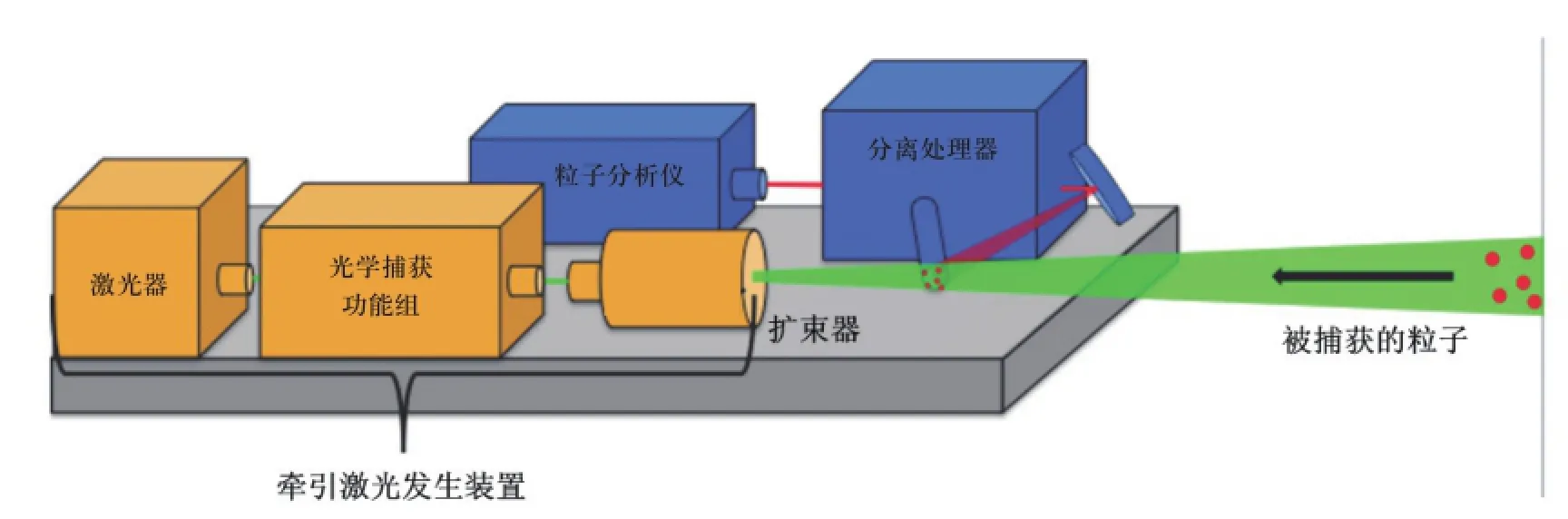
NASA研究小组采用3种不同的方式,研究如何通过激光集合并传送微粒到另一个装置:
第一种方式是采用两束涡旋激光,利用2个彼此环绕的反向涡旋光束,微粒诱捕并移动到相互叠加的光束中央。
第二种方式是使用由涡旋激光调制而成的螺线激光,环绕物体做螺旋运动,并产生驱使颗粒朝着与光束源相反方向移动的作用力。研究人员发现,这项技术能够在真空内发挥作用。
第三种方式采用具有高阶涡旋的贝塞尔激光,这种激光在涡旋周围形成光环,在物体移动轨迹上产生磁场,将物体向光源推动,逆向牵引物体。
NASA的研究认为,该技术有望在未来的空间活动中得到应用,例如:行星样品采样、太空漂流物取回、彗星尾焰采样、大气气溶胶粒子采样等。通过研究,NASA认为该技术成熟度为3,目前处于实验室验证阶段,并认为未来10年内可以进行飞行试验。
除此之外,对于空间飞行器的关键光学器件,因其功能特性而常处于飞行器舱外,且无法涂抹多种防护涂层使其远离微小空间碎片的伤害。而微小碎片日积月累的撞击和粘附,会使得光学器件及太阳能电池器件受到缓慢危害,逐渐导致性能下降,甚至无法正常运行。
同时,空间光学系统的突出特点就是对污染高度敏感,在空间光学系统研制及运行期间形成的分子污染膜会造成光学透过率、反射率的改变,颗粒污染物会造成散射光的增加,都会影响到空间高分辨率光学载荷的分辨率和灵敏度。因此,空间光学载荷光学系统的污染物清理显得尤为重要。
采用激光牵引技术研制的微型激光牵引装置,可以置于空间敏感光学器件的前端,形成密集的激光防护网,吸附空间微碎片,使其不至于损伤光学镜头。微型激光牵引装置可以通过摆扫光学镜头表面的方式,吸附、清理、清除附着于光学元器件表面的污染物,起到对保护光学镜头外表面的作用;也可以通过扫描光学系统内部的方式,清理、清除附着于光路上光学元器件两侧的污染物,从而起到保护内光路的作用。
同时,选择光学探测器不敏感的激光波段,避免牵引激光杂光对成像质量的影响,甚至可以在相机工作期间进行同步清理。
综上所述,基于光驱动的激光牵引技术在空间微重力环境下微粒的搜集、清理、传送领域,特别是空间高价值光学器件镜头的污染清理方面,具有广阔的应用前景。
4 结束语
研究表明,虽然在目前阶段,牵引激光只能移动微粒大小的物体,但在空间微重力条件下,激光负向牵引技术却具有广阔的应用前景。NASA对该技术在空间领域的应用持积极态度,认为在未来的空间任务中,该项技术将会得到广泛应用,例如:可以用于光学镜头微小碎片防护、光学镜头污染物清理、行星样品搜集、太空漂流物取回、彗星尾焰粒子采样、大气气溶胶粒子采样等方面。
最新消息显示,通过先进性创新先期研究的评估与考量,2016年8月,NASA已开始与更多的科学家们合作,开展该技术进一步的研究工作,以将其尽快应用到空间工程领域。
