基于最大相关峭度反褶积法的行星齿轮故障诊断
2016-02-15吴学勤王细洋
吴学勤,王细洋
(南昌航空大学 航空制造工程学院,南昌 330063)
基于最大相关峭度反褶积法的行星齿轮故障诊断
吴学勤,王细洋
(南昌航空大学 航空制造工程学院,南昌 330063)
针对行星轮系结构复杂,故障信号特征提取困难,提出使用扭振信号对行星齿轮箱故障进行诊断。通过对行星齿轮箱横向振动信号与扭振信号的频谱分析发现,扭振信号相对于往复振动信号更适合行星轮系的故障诊断。针对扭振信号微弱,冲击特性不明显,提出基于最大相关峭度反褶积处理扭振信号。首先对采集的行星齿轮扭振信号先进行零均值化预处理,然后使用MCKD方法增强扭振信号的冲击特性。以故障冲击特性的峭度值作为选择FIR滤波器长度的选择依据,最终使得行星齿轮箱扭振信号的故障冲击特征得到显著提升。该方法对于扭振信号的降噪与提高周期故障冲击特征有效,适用于行星齿轮箱扭振信号的故障诊断。
行星轮系;最大相关峭度反褶积;扭振信号;时域;故障诊断
0 引言
由于行星齿轮传动具有结构紧凑、大传动比、高能量密度、低噪声、低振动和高效率等诸多优点,被广泛运用于风力涡轮机、钢厂、破碎机、发电厂和航空航天领域等。然而行星轮齿轮箱的工作环境一般都非常恶劣,长时间在高速重载、强冲击、高污染的条件下工作,极易发生轮齿疲劳点蚀、齿根裂纹乃至轮齿或轴断裂等失效现象。齿轮失效是齿轮传动中难以避免的问题,并且是诱发机器故障的重要原因。行星齿轮箱故障诊断技术对于降低设备维修费用、防止突发性事故具有重要的实际意义。
齿轮故障诊断多采用基于振动信号的故障诊断方法,通过安装在齿轮箱箱体上的多个振动传感器采集振动信号。行星轮系故障诊断技术,大部分参考定轴轮系的故障诊断方法。行星齿轮工作过程中,多个行星轮与太阳轮和齿圈的啮合位置相对箱体上的传感器随时间不断变化,测得的往复振动信号经过多次不同位置的啮合叠加造成额外的幅值调制,并且行星架的旋转使得行星轮系的谱估计具有典型的非对称性[1-2],使得行星齿轮故障诊断非常困难。在旋转机械运转过程中,由于转轴的主动力矩与负荷反力矩之间失去平衡,致使合成扭矩的方向来回变化,导致旋转轴角速度不断变化定义为扭振。扭振信号相对往复振动信号有很大的优势,传递路径不会对扭振信号造成额外的调制,所以扭振信号相对于横向振动信号对故障更加敏感[3]。
已有很多学者对行星齿轮箱故障提取方法做了大量研究。Lewicki等[4]通过改进的时域同步平均技术对美国空军直升机齿轮箱故障分析,在齿轮箱上安置多个传感器,以提高信号采集的可靠性和信号分离的准确性。胡贵锋等[5]针对行星轮系最小圈数特性,通过对行星齿轮振动信号添加Turkey窗,抑制能量泄漏,然后使用时域同步平均降噪,提取行星齿轮故障信号。Dong等[6]尝试采用半隐马尔科夫模型(HSMMs),分析UH-60A直升机振动采样数据,以区分正常齿轮和缺陷齿轮,其最大问题是需要足够的训练样本数据。。Barszcz等[7]利用谱峭度提取风电行星齿轮箱内齿圈裂纹故障特征。冯占辉等[8]提出基于希尔伯特—黄谱的啮频邻域内能量特征来检测行星齿轮箱太阳轮断齿故障。雷亚国等[9]对行星齿轮箱故障诊断的研究进展进行了综合性概述,认为现有的研究主要集中于行星齿轮箱中的太阳轮、内齿圈等相对静止的零部件上,忽略了既有自转又有公转的行星轮的研究,该提议值得借鉴。
以上方法对行星齿轮箱横向振动信号故障诊断做出了相当大的贡献。然而利用扭振信号对行星齿轮箱故障进行诊断没有涉及。雷亚国等[9]对近年来国内外行星齿轮箱故障诊断的方法做了一定的归纳与总结,并认为考虑齿轮箱局部损伤、选择敏感测点等方法是研究行星齿轮箱故障的有效技术手段,该设想值得本文借鉴。冯志鹏等[10-13]在考虑传动路径、齿轮故障对齿轮啮合的调幅调频作用,分析了齿轮各类故障的振动信号频谱结构及故障特征,然而所得的频谱图效果并不理想。最大相关峭度反褶积算法(Maximum Correlated Kurtosis Deconvolution,MCKD)[14],以相关峭度为评判标准,通过选择一个FIR滤波器使得信号的相关峭度最大化,通过迭代选择技术去卷积,降低信号噪声,突出信号的冲击特性。MCKD方法可以有效识别出时域中的重复故障特征。本研究通过对扭振信号的零均值化预处理,使用MCKD方法对处理后的信号时域部分进行降噪并提高峭度,对行星齿轮箱故障进行诊断。
1 最大相关峭度反褶积理论
1.1 相关峭度(CK)
故障的周期性可以通过公式表示成如下形式[14]:
移位相关峭度:
(1)
其中,
(2)

1.2 最大相关峭度反褶积算法
(3)
为了使CK1(T)最大化,令
(4)
由式(2)~式(4)可得:
改写成矩阵形式,即
(5)
(6)
(7)
其中式(5)~式(7)中,
本试验使用MCKD方法对零均值化处理后的扭振信号进行分析。通过选取合适的周期、滤波器长度及移位数,预计可以有效的过滤原信号中的噪声等干扰成分,然后选取合适的迭代次数,预计峭度将得到显著提升。
2 行星齿轮箱故障诊断试验
本试验采用2K-H单极行星齿轮箱为试验对象,对正常状态与单个行星轮断齿的横向振动信号与扭振信号进行提取。由于增量式编码器具有安装方便、测量精度高、性价比高等诸多优点,通过将增量式编码器安装在行星齿轮箱的输入轴与输出轴上测量扭振信号。本试验采用BLE100-40-5L6-2048CR075型增量式编码器,编码器的各项参数为:每转产生2 048个脉冲;最大转速为5 000 r/min;角分辨率为0.176°。
由1台额定功率5.0 kW的三相异步交流电机带动整个装置,电机最大转速N=1 430 r/min。采集的各项参数为:采样点数n=6 144;采样频率fs=10 kHz;采样时间t=0.614 4 s。试验硬件设备参数如表1所示。
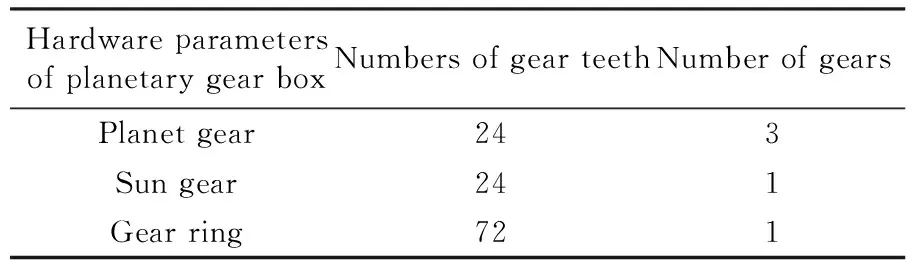
表1 行星齿轮箱硬件参数
本试验的实验平台如图1所示。由图可知齿圈固定,太阳轮为输入端,行星架为输出端。太阳轮齿数ZS=24,行星轮齿数ZP=24,齿圈齿数ZR=72。太阳轮到行星架的传动比iSH=4,太阳轮到行星轮的传动比iSP=-2,太阳轮与电动机联动,电动机转速为N,则太阳轮转速为NS=N,啮合频率表达式为
(8)
由式(8)得出,此时啮合频率fm=429 Hz。
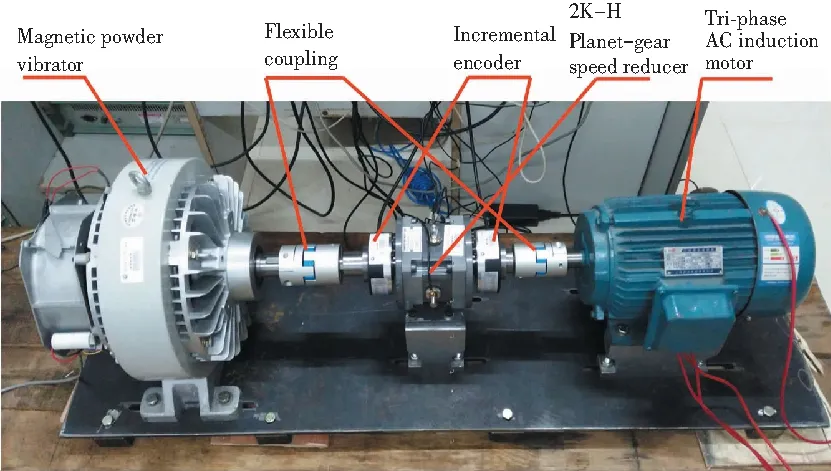
图1 基于扭振信号的行星齿轮传动故障诊断实验平台
Fig.1 Experimental platform of signal fault diagnosis to planetary gear box based on torsion vibration signal
在行星齿轮箱运转过程中,各类误差会导致太阳轮与行星轮,行星轮与齿圈之间的啮合刚度产生变化。这些额外的周期变化重复频率等同于相对行星架的齿轮旋转频率。单级行星齿轮箱当故障行星轮与太阳轮和齿圈分别啮合时产生故障脉冲信号,此时行星轮的故障啮合频率和太阳轮故障啮合频率表达式如式(9)、式(10)所示[15]。
(9)
(10)
行星齿轮箱试验理论参数如表2所示。
通过人为手段破坏单个行星轮的轮齿,达到模拟故障状态下的行星齿轮箱运转效果(图2)。
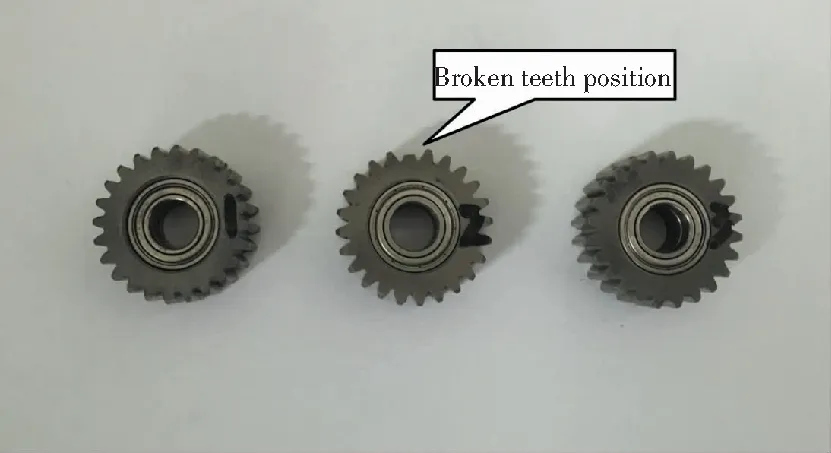
图2 行星轮断齿Fig.2 One tooth fracture in planetary gear
3 行星齿轮故障信号分析
3.1 行星齿轮往复振动信号与扭转振动信号频谱分析
本试验采用的电动机最大转速N=1 430 r/min,实际运转中转速N=1 426 r/min。由式(9)、式(10)可以得出太阳轮(输入)理论转频为23.767 Hz,理论啮合频率fm=427.8 Hz。图3a、图3b为正常状态下行星齿轮箱扭振信号的时域和频谱图,从图3b中可以清晰地看到太阳轮的转频23.19 Hz以及太阳轮转频的各阶倍频,本图只标明了太阳轮的2、3、4、6、9阶转频,分别为47.61、70.8、93.99、141.6、212.4 Hz。从图3b中还可以看到,啮合频率fm=424.8 Hz以及啮合频率的二倍频和三倍频分别为fm2=850.8 Hz,fm3=1 276 Hz。图3c、图3d为正常状态下行星齿轮箱横向振动信号的时域和频谱图。由于噪声等因素的干扰,在图3d中不能看到突出的转频和啮合频率。
由本试验可以得出,在相同情况下,行星齿轮箱的扭振信号比往复振动信号频谱所受的噪声与调制干扰更少,传递过程更简单,几乎不受由传递路径导致的影响,扭转振动信号比横向振动信号对故障更加敏感。所以行星齿轮故障诊断中扭振信号比往复振动信号具有更大优势。
3.2 行星齿轮扭转振动信号的分析(MCKD)
本试验通过MCKD方法对所采集的不同状态下的扭振信号时域部分进行分析。此时电机的实际转速为N=1 426 r/min。图4a为正常状态下的行星齿轮扭振信号,图4b为经过MCKD处理过的行星齿轮扭振信号的时域图。
可以明显看出图4b中的冲击特性。冲击之间的间隔分别为0.042 5 s(0.263 2~0.220 7 s),0.084 s(0.347 9~0.263 2 s)和0.169 5 s(0.390 2~0.220 7 s),即分别对应的冲击频率为太阳轮(输入)试验转频23.529 Hz、行星轮试验转频fp=11.806 Hz和行星架(输出)试验转频fc=5.900 Hz。
图5a为负载扭矩20 N·m条件下的一个行星齿轮断齿的扭振信号,图5b为图5a经过MCKD处理后的扭振信号。此时由于增加了故障和负载且在低负载工况下运行,行星齿轮箱运行过程中的噪声等干扰因素增强,对信号的采集与处理有一定的影响。此时电动机实际转速为N=1 409.35 r/min。行星轮理论转频和行星架理论故障频率分别为fp=17.617 Hz、fc=5.872 Hz。与图4a相比较,可以很明显的看出此时的原信号更加复杂。
使用MCKD对信号进行处理,有效地抑制了噪声,提取出时域故障特征。通过图5b可以很清晰地看出冲击之间的间隔分别为0.05 s(0.333 4~0.390 4 s)和0.170 5 s(0.276 7~0.447 2 s),即分别对应的冲击频率为行星轮试验故障频率17.544 Hz和行星架(输出)试验转频5.865 Hz。
当机械运转中负载增加时,机械传动中的噪声会增加,实际工程中,负载一般都比较大。将负载大幅度上升至50N·m,模拟实际工程应用。
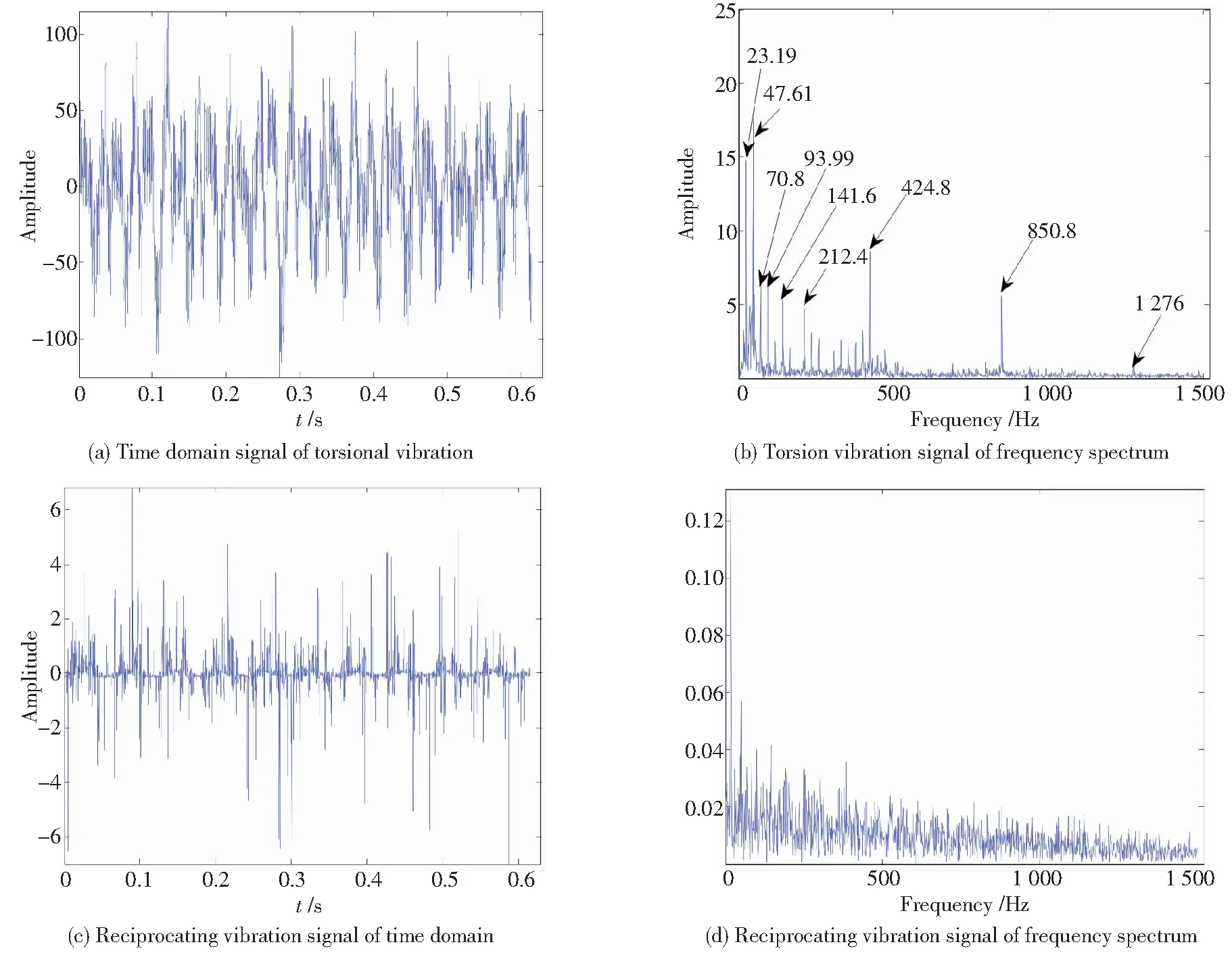
图3 正常状态(无负载无故障)行星齿轮箱扭振信号和振动信号Fig.3 Torsion vibration signals and vibration signals of planetary gearbox in normal state (trouble-free and non-loaded)
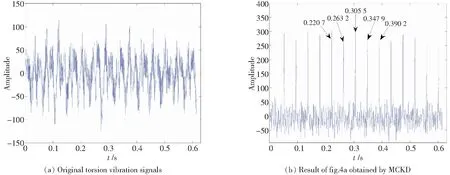
图4 正常状态(无故障无负载)行星齿轮传动扭振信号Fig.4 Torsion vibration signals of planetary gearbox in normal state (trouble-free and non-loaded)
图6a为负载扭矩50 N·m条件下的一个行星齿轮断齿的扭振信号,图6b为MCKD分析的时域信号。此时由于增加负载,电动机转速为N=1 374.71 r/min。此时的行星轮理论故障频率和行星架理论转频分别为fp=17.184 Hz、fc=5.728 Hz。可以清晰地看出图6a原信号比图5a原信号更加复杂。
研究发现,在大负载、强噪声环境下,MCKD方法对扭振信号的处理仍然适用。通过图6b可以很清晰地看出冲击之间的间隔分别为0.058 2 s(0.359 3~0.417 5 s)和0.174 7 s(0.301 1~0.475 8 s),即分别对应的冲击频率为行星轮试验故障频率17.182 Hz和行星架(输出)试验转频5.724 Hz。
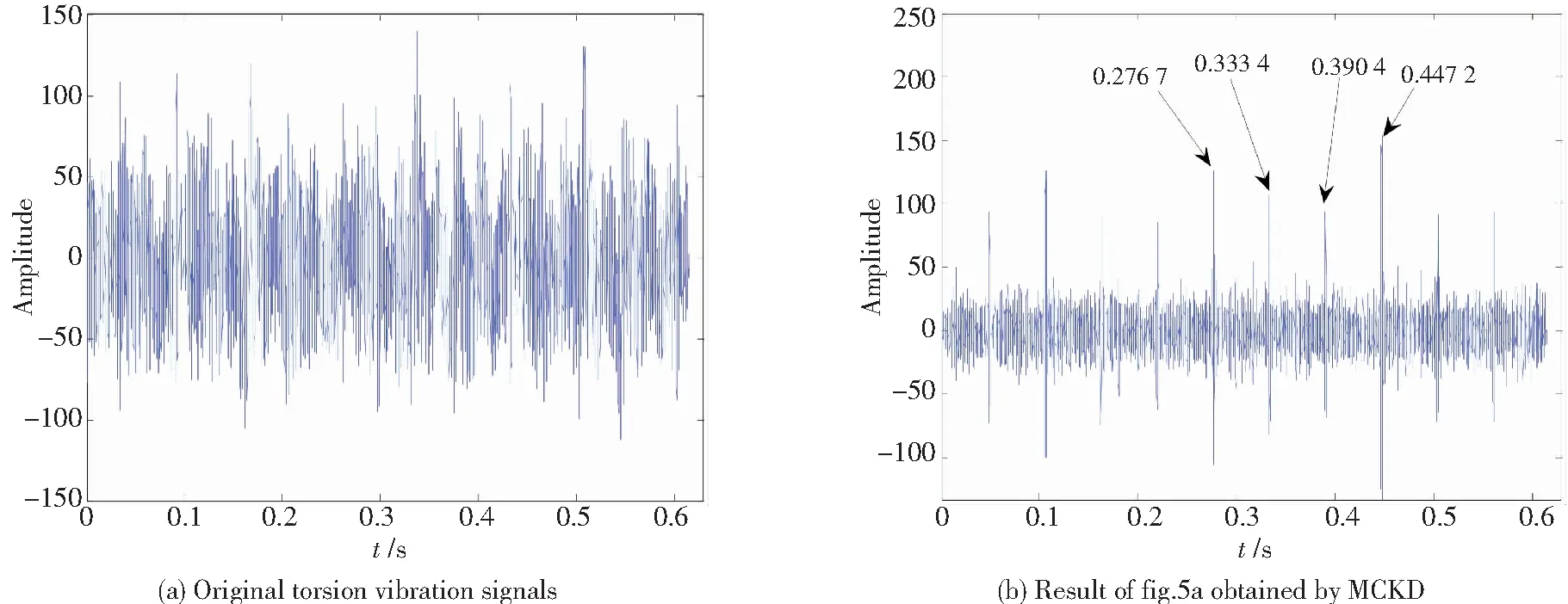
图5 负载扭矩20 N·m一个行星轮断齿故障的行星齿轮传动扭振信号Fig.5 Torsion vibration signals of planetary gearbox with one tooth broke and 20 N·m load

图6 负载扭矩50 N·m一个行星轮断齿故障的行星齿轮传动扭振信号Fig.6 Torsion vibration signals of planetary gearbox with one tooth broke and 50 N·m load
由以上3组试验图形与数据分析可以看出,使用MCKD提取的转频与故障频率和理论得出的频率误差在5%以内。MCKD能有效的提取行星齿轮扭振信号的时域冲击特性,当负载大幅度增加时,MCKD仍适用于行星齿轮扭振信号故障诊断。
通过以上试验,经过MCKD处理后的行星齿轮扭振信号的冲击特性得到了提升,当负载加强噪声增大的情况下,该方法对行星齿轮箱扭振信号冲击特性的提升仍然明显。
4 结论
1)行星齿轮箱扭振信号故障微弱,利用MCKD方法,有效地增强了故障信号的微弱冲击特性。通过对MCKD算法中周期、滤波器长度、移位数的选择,有效地降低了行星齿轮箱扭振信号中的噪声等干扰因素。
2)行星轮系故障诊断中,扭振信号比往复振动信号更加简单,所受干扰更小,更好地保留真实信号的特性。
[1] Mcfadden P D, Smith J D. An explanation for the asymmetry of the modulation sidebands about the tooth meshing frequency in epicyclic gear vibration[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science,1985,199(13):65-70.
[2] Mcnames J. Fourier series analysis of epicyclic gearbox vibration[J]. Journal of Vibration and Acoustics,2002,124(1):150-152.
[3] 郑利兵. 基于轴扭振测量的机械传动系统故障诊断[D]. 太原:太原理工大学, 2002:5-6.
[4] Lewicki D G, Samuel P D, Conroy J K, et al. Planetary transmission diagnostics[C]. Nasa Cr Nasa Glenn Research,2004:5-9.
[5] 胡贵锋,王细洋. 基于时域同步平均法的行星齿轮振动信号分离技术[J]. 中国机械工程,2013,24(6):787-791.
[6] Dong M, He D, Banerjee P, et al. Equipment health diagnosis and prognosis using hidden semi-Markov models[J]. The International Journal of Advanced Manufacturing Technology,2006,30(7-8):738-749.
[7] Barszcz T, Randall R B. Application of spectral kurtosis for detection of a tooth crack in the planetary gear of a wind turbine[J]. Mechanical Systems and Signal Processing,2009,23(4):1352-1365.
[8] 冯占辉,胡茑庆,程哲. 基于时频域状态指标的行星齿轮断齿故障检测[J]. 机械科学与技术,2010,29(6):701-704.
[9] 雷亚国,何正嘉,林京,等. 行星齿轮箱故障诊断技术的研究进展[J]. 机械工程学报,2011,47(19):59-67.
[10] 冯志鹏,褚福磊. 行星齿轮箱齿轮分布式故障振动频谱特征[J]. 中国电机工程学报,2013,33(2):118-125.
[11] 冯志鹏,赵镭镭,褚福磊. 行星齿轮箱齿轮局部故障振动频谱特征[J]. 中国电机工程学报,2013,33(5):119-127.
[12] 冯志鹏,赵镭镭,褚福磊. 行星齿轮箱故障诊断的幅值解调分析方法[J]. 中国电机工程学报,2013,33(8):107-111.
[13] Feng Z, Zuo M J. Fault diagnosis of planetary gearboxes via torsional vibration signal analysis[J]. Mechanical Systems and Signal Processing,2013,36(2):401-421.
[14] Mcdonald G L, Zhao Q, Zuo M J. Maximum correlated Kurtosis deconvolution and application on gear tooth chip fault detection[J]. Mechanical Systems and Signal Processing,2012,33(1):237-255.
[15] 冯志鹏,褚福磊. 行星齿轮箱故障诊断的扭转振动信号分析方法[J]. 中国电机工程学报,2013,33(14):101-106.
Fault Diagnosis of Planetary Gearboxes Based on Maximum Correlated Kurtosis Deconvolution
WU Xue-qin,WANG Xi-yang
(SchoolofAeronauticsMechanicalEngineering,NanchangHangkongUniversity,Nanchang330063,China)
Due to the structure of a planetary gear train is complicated and the fault signal feature is extremely difficult to extract, so the method of using torsion vibration signal to diagnose the fault of planetary gearboxes is proposed. Based on comparison of spectrums of reciprocating vibration signals and torsion vibration signal, finally the result that torsion vibration signals were more suitable for the fault diagnosis of a planetary gear train than reciprocating vibration signals was obtained. A fault diagnosis method for torsion vibration signal based on maximum correlated kurtosis deconvolution was proposed, because the strength of torsion vibration signals is weak and the impact characteristics are not obvious. Firstly the method of zero mean was applied to process torsion vibration signals of planetary gearbox, then MCKD method was utilized to enhance the impact characteristics of torsion vibration signals. The length of FIR filter is based on the kurtosis of fault impact characteristics. Eventually the impact characteristics of the torsion vibration signal of planetary gearbox received a significant promotion by MCKD. The method to reduce the noise component of the torsion vibration signal and improve the cycle impact fault characteristics is effective. It is appropriate for the fault diagnosis of torsion vibration signals of planetary gearboxes.
planetary gear train; maximum correlated kurtosis deconvolution; torsional vibration signal; time domain; fault diagnosis
2016年10月5日
2016年11月30日
国家自然科学基金(51465040)
王细洋(1967年-),男,博士,教授,主要从事机械加工过程监控及设备故障诊断等方面的研究。
TH17
A
10.3969/j.issn.1673-6214.2016.06.004
1673-6214(2016)06-0350-07