桨翼联合操纵微小型水下机器人运动控制仿真
2016-02-15黄晓雪
黄晓雪
(渤海船舶职业学院,辽宁兴城125105)
桨翼联合操纵微小型水下机器人运动控制仿真
黄晓雪
(渤海船舶职业学院,辽宁兴城125105)
随着船舶行业的发展,微小型水下机器人技术的发展也越来越迅速,它与其他海洋结构物相比具有体积更小、阻力更低、操纵性能更好的特点,而要保证良好操纵性的前提是微小型水下机器人的运动控制技术。结合舵桨翼微小型水下机器人的特点,通过研究其运动控制与推力分配情况,完善了微小型水下机器人的水动力模型,为微小型水下机器人的性能测试和控制器的设计提供了一个有效的仿真平台。
推力分配;运动控制;simulink仿真
随着海洋科学技术的发展,微小型水下机器人技术的发展也日益迅速。水下机器人在战争中应用前景十分广泛,它是制衡航母的重要武器,许多发达国家都投入了大量的人力物力来对其进行研发,并且已经取得了长足的进展。同时,水下机器人正朝着远程控制、智能控制、微小型化发展,对其要求也越来越高。为了节约能量减小阻力,新型的水下机器人尝试采用舵、翼、桨共同控制的操纵方法,其控制系统的稳定可靠运行也为微小型水下机器人圆满地完成作业任务提供了有利的保障。但是对于这种微小型水下机器人要想达到理想的操纵效果,对于舵桨翼中的推力如何进行合理分配又成了十分重要的议题。本文对水下机器人的推力分配进行研究,并在MATLAB/simulink软件环境下对其进行平面运动仿真模型的搭建,通过仿真技术进行试验得出实验结果验证推力分配的合理性。
1 舵桨翼微小型水下机器人推力分配设计
对于水下机器人控制研究的首要任务是推力的分配,也就是将根据算法得出的结果分配到螺旋桨和舵翼上。本文所研究的微小型水下机器人采用一个主推器、两个舵、两个翼,其结构如图1所示。
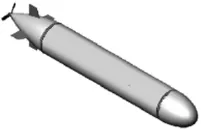
图1 轴测图
由图中可以看出,所研究的微小型水下机器人的推进器为单桨,尾翼十字形对称布置在机器人尾部,机器人通过改变舵翼角度这一操纵方式可以实现转向、升沉运动,故在进行推力分配的过程中首先分析其控制面作用力和螺旋桨推力。
1.1 控制面作用力
由舵的作用原理可知,当舵以速度V和攻角α运动时,相当于流体以速度V和攻角α向舵运动,并可以将这个作用力分解为垂直于水流方向的升力L和由于水的粘性作用产生的阻力D。

在操舵过程中,舵转过一个固定的舵角,根据已知的CL-α和CD-α实验数据,采用simulink插值模块插值,可得到此舵角下的升力系数和阻力系数,进而求得升力和阻力,并根据舵翼位置得出作用力矩。然后将所得数据带入运动方程,得出舵力数学仿真模型,以升力为例,简要介绍模型仿真过程。图2为不同舵角下的升力系数。
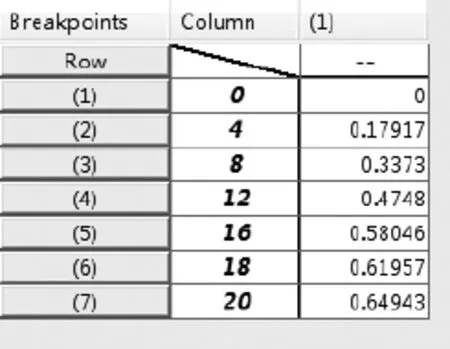
图2 升力系数数据
1.2 螺旋桨推力
螺旋桨的推力和力矩可以用航速V和控制电压Ut的函数进行计算,即:

通过实验测得在不同电压和不同航速下的螺旋桨推力数据,并将其结果利用插值模块进行插值,即可求得推力和力矩的数值,进而实现螺旋桨数学模型仿真。计算流程如图3所示。
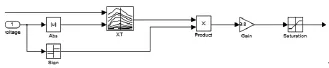
图3 螺旋桨推力T的计算过程
根据船舶螺旋桨理论,微小型水下机器人依靠调节螺旋桨的推力、升力、阻力以及力矩来实现运动控制。改变推力和阻力可以调节纵向速度,改变升力的力矩可以调节角度。
2 微小型水下机器人运动控制仿真实验
MATLAB软件在图形和信号处理、控制、设计等方面都有着广泛的应用。其中SIMULINK是MathWorks公司开发的又一个具有重大影响力的软件。它可以处理线性、非线性系统;离散、连续及混合系统;单任务、多任务离散事件系统。除此之外,Simulink还为用户提供了一个系统级的建模与仿真的使用环境,而且借助于MATLAB在计算上的优势,可以建立从初始设计到最终要求之间的可视化模拟仿真桥梁,很大程度上弥补了传统的设计和开发软件的不足。以桨翼联合操作的微小型水下机器人为研究对象建立水平面的运动仿真模型流程如图4所示。
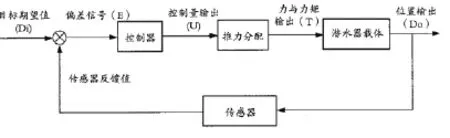
图4 水平建模流程图
目标期望值包括纵向航速和航向角的期望值,将期望值与传感器的反馈值进行作差得出偏差值,将偏差信号输入控制器得出控制力和力矩,再进行推力分配使得推进器与控制面上的力与力矩能维持一定的运动姿态,即航速与航向角。由传感器测得的航速与航向角返回至目标值作差中,就可以完成闭环回路的控制。要进行仿真建模,首先要对研究对象进行运动学分析,得出其运动的数学模型,再运用数学模型进行simulink的运动控制仿真。
2.1 水下机器人运动模型的建立
2.1.1 坐标系的建立和转换
在建立水下机器人运动与仿真系统之前,首先需要确定适合描述水下机器人运动的坐标体系。本文采用国际船模拖曳水池(ITTC)和造船与轮机工程学会(SNAME)术语公报体系,建立固定坐标系(简称“定系”)和运动坐标系G-xyz(简称“动系”,或“O-xyz”) 两种坐标系,如图5所示,每个坐标系都采用右手定则进行确定。
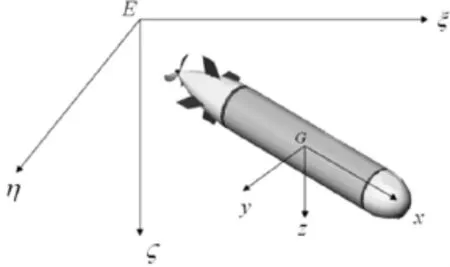
图5 固定坐标系和运动坐标系
固定坐标系与运动坐标系之间的转换关系:

其中:

则运动坐标系为固定坐标系与T逆矩阵的乘积,这里就不在赘述。
2.1.2 粘性水动力计算
根据流体水动力学的理论,水平面运动时所受粘性类水动力的线性表达式:
当研究小舵角的粘性水动力时,由于偏离△u,w,d小,可忽略水动力泰勒展开式中的二阶以上项,参照水平面运动时的水动力线性表达式,其在垂直面运动时粘性水动力的线性表达式为:
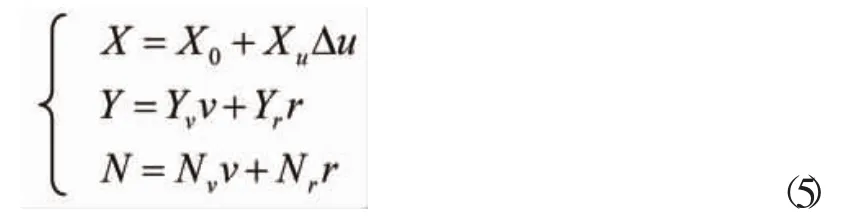
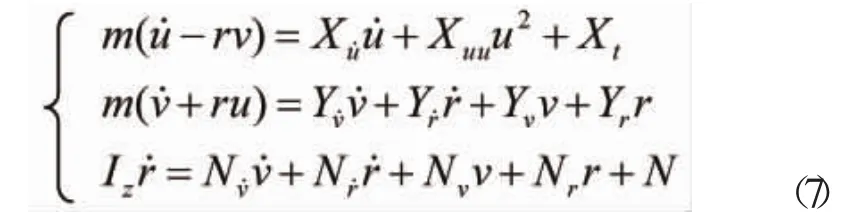
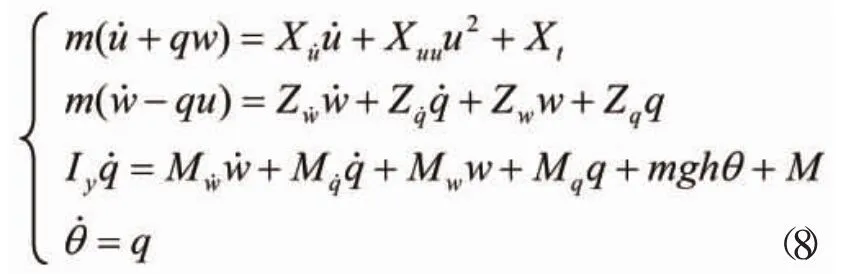
当艇体上下前后对称时,结合平面运动方程得水平面的操纵运动方程:
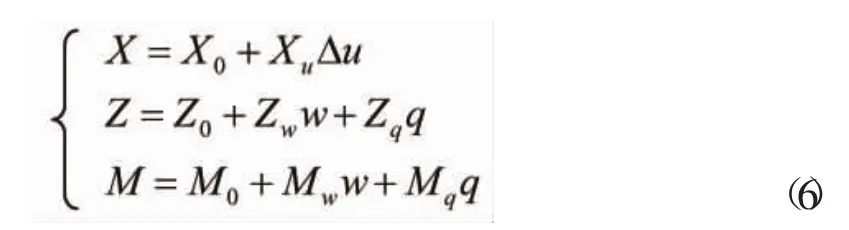
垂直面操纵运动方程:
由于在研究水下机器人水平面运动时只考虑纵向速度u及角速度r,而不考虑v,所以令v=0则上式可简化为:

令

同理在垂直面上时:

2.2 simulink模型的建立
将式(10)和(11)在simulink的s函数中进行编写,得出simulink的数学模型,并将舵桨翼代入数学模型中进行仿真得到水下机器人模块,该模块的输入是电压与舵角数值,经过插值得到相应的螺旋桨推力、舵升力力矩与阻力。由流程图和AUV模块可得到如图6所示的水平运功仿真模型。
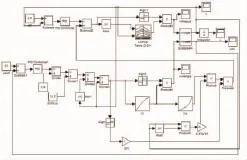
图6 水平面运动仿真模型
U0,yaw0模块分别输入的是常数,即纵向速度u及航向角yaw的期望值,与回路中测得的返回实际值作差得出期望值与实际值的偏差,将偏差输入pid控制模块中得出达到期望值所需要的力与力矩,将力与力矩分别进行推力分配后得到相应的电压及其舵角后输入其中的subsystem模块中,得出当前条件下的纵向速度u及航向角yaw。垂直面的仿真与水平面的过程及原理基本相似,其进行的是深度及纵倾角的控制,其仿真模型如图7所示。
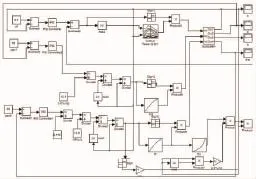
图7 垂直面运动仿真模型
3 仿真结果分析
3.1 仿真结果
水平面纵向速度u仿真结果:期望值u0= 2.5米/秒,水平面艏向角的仿真结果:期望值yaw0=37度,则推力合力和力矩曲线的仿真结果如图8和图9所示。

图8 推力合力曲线

图9 力矩曲线
舵桨翼微小型水下机器人水平面的运动控制结果分析为:仿真时间进行了1 000秒,可以看出在足够长的时间内,水下机器人的纵向速度与艏向角在前200秒以内就达到了其期望值,运动控制曲线都比较稳定,超调量几乎为零,上升时间比较短,说明控制参数的选择比较适当,能使水下机器人在水平面的运动保持一定的航速与艏向角航行。水平面的纵向速度是通过轴向推力的合力来控制的,航向角的控制是通过力矩的改变来实现的,而推力合力与力矩的控制响应曲线也是很平稳的上升,与实际情况是大致相符的。
垂直面仿真结果如图10和图11所示。

图10 合力曲线
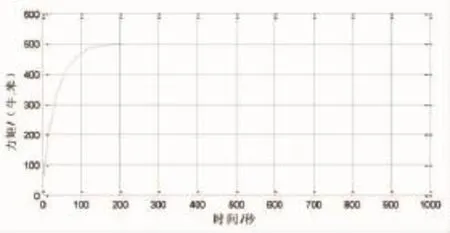
图11 力矩曲线
舵桨翼微小型水下机器人垂直面的运动控制结果分析为:仿真时间也是进行了1 000秒,可以看出在足够长的时间范围内,水下机器人在前200秒内就达到了目标值并能一直保持,垂直面上的纵向速度、深度与纵倾角的控制曲线都是平稳上升的,超调量几乎为零,而且达到平稳的时间也比较短,说明控制很稳定,即水下机器人的垂直面上的运动控制性能良好。垂直面上的纵向速度也是通过轴向的推力合力来控制的,纵倾角的控制则是通过升力产生的力矩的改变来实现的,深度控制则是通过升力改变来实现的,它们的控制响应曲线与其控制的对象相符合。
3.2 结果分析
由于受流体水动力的影响,若不加以控制,水下机器人将无法保持一定的航向与深度,因此要对水下机器人的运动加以控制,即通过控制水下机器人的动力装置来使其保持一定航向与深度的航行。仿真结果曲线表明,控制器参数的选择和推力分配的设计都是合理的,但由于所采用的推进器是单桨推进,联合舵翼,推力分配过于简单,不适用于复杂的模型。
通过围绕舵桨翼微小型水下机器人的平面运动、运动控制方法、推力分配和仿真模拟展开工作,对舵桨翼微小型水下机器人的平面运动进行运动学与动力学分析,根据流体水动力学理论,得出水下机器人平面运动的数学模型,即动力学方程。根据仿真建模流程图,用MATLAB/simulink软件搭建仿真模型,并进行仿真实验,最后对实验进行结果分析,验证了控制器以及推力分配设计的合理性,对相关内容的研究具有一定的指导意义。
[1]苏玉民,万磊,李晔,等.舵桨联合操纵微小型水下机器人的开发[J].机器人,2007(2):151-154.
[2]李晔,刘建成,徐玉如,等.带翼水下机器人运动控制的动力学建模[J].机器人,2005(2):128-131.
[3]郭冰洁.微小型水下机器人运动控制[D].哈尔滨:哈尔滨工程大学,2008.
[4]苏玉民,黄胜.船舶螺旋桨理论[M].哈尔滨:哈尔滨工程大学出版社,2003.
[5]徐玉如,庞永杰,甘永,等.智能水下机器人技术展望[J].智能系统学报,2006(1):9-16.
[责任编辑:刘 月]
Motion Control Simulation of the Micro Underwater Robot Operated by Propeller and Wing
HUANG Xiaoxue
(Bohai Shipbuilding Vocational College,Xingcheng 125105,China)
With the development of shipbuilding industry,the development of micro underwater robot technology becomes more and more rapid.Compared with other marine structures,it has the characteristics of smaller volume,lower resistance and better maneuverability.The premise of good maneuverability is the motion control technology of micro underwater robot.Combined with the characteristics of the rudder,propeller and wing micro underwater robot,through the research of its motion control and thrust allocation,the researcher improves the hydrodynamic model of the micro underwater robot,and provides an effective simulation platform for the its performance testing and controller design.
thrust allocation;motion control;simulink simulation
TP242
A
2095-5928(2016)06-54-05
2016-10-25
黄晓雪(1988-),女,黑龙江安达人,助教,硕士,研究方向:船舶模拟仿真系统研究。
10.16850/j.cnki.21-1590/g4.2016.06.015
